ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу улучшения времени первого определения местоположения, TTFF, чувствительности и точности. Настоящее изобретение также относится к Базовой службе, устройству определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, Радиомодулю и Пользовательскому оборудованию, UE, выполненным для той же цели.
УРОВЕНЬ ТЕХНИКИ
В настоящее время действуют две основные спутниковые навигационные системы. Глобальная система определения положения (GPS) в США и Глобальная навигационная спутниковая система (ГЛОНАСС) в России действуют с 1978 г. и доступны в мировом масштабе с 1994 г. Система состоит из вплоть до 32 спутников средней околоземной орбиты в шести разных плоскостях орбиты, причем точное количество спутников меняется, так как заменяются более старые спутники. ГЛОНАСС была полностью функциональной навигационной группировкой в 1995 г. После распада Советского Союза она была восстановлена в 2011 г.
Новые системы типа Galileo, навигационной системы COMPASS и IRNSS (Индийская региональная спутниковая система навигации) находятся в разработке. IRNSS является автономной региональной спутниковой навигационной системой под управлением правительства Индии. Она будет состоять из группировки из 7 спутников и предназначена для картографирования Индии. COMPASS является китайской системой, имеющей вплоть до 35 спутников на разных орбитах. Она намеревается расшириться до глобальной навигационной системы к 2020 г. Galileo учреждена Европейским союзом и состоит из 30 спутников, обеспечивающих глобальное покрытие. Она начнет действовать в 2014 г. и выйдет на полную мощность в 2020 г.
Оценивается, что девять из каждых десяти новых спутниковых навигационных приемников, продаваемых в настоящее время, предназначены для гражданского или коммерческого использования. Современные системы, таким образом, широко используются гражданским населением. Высока степень проникновения для старого мобильного телефона, переносного компьютера, смартфона или планшета, оборудованного устройством определения положения.
Общим названием для всех этих систем являются Глобальные навигационные спутниковые системы (GNSS). В этих GNSS необходимы вспомогательные средства, и они используются сегодня для улучшения характеристики времени первого определения местоположения (TTFF), чувствительности и точности касательно данных определения положения. Эти вспомогательные средства могли бы принадлежать к следующим видам:
- Снабжение устройства определения положения информацией о положениях спутников GNSS для заданного момента в будущем, отклонениях эталона времени спутника, кодах PRN (псевдослучайного шума) для спутников и т.п. Все вместе это называется данными эфемерид и календаря. Эта информация отправляется через беспроводную сеть, и поэтому устройство должно быть оборудовано приемопередатчиком WWAN (Беспроводная глобальная сеть) или WLAN (Беспроводная локальная сеть), чтобы иметь возможность взаимодействовать с сетью мобильной связи и принимать упомянутые данные.
- Предоставление приблизительного положения с использованием информации, предоставленной тем, к какой базовой станции в сети мобильной связи подключается устройство в случае, когда устройство оборудовано приемопередатчиком WWAN. Таким образом, вместе с данными эфемерид, предоставленными или сохраненными в памяти устройства, уменьшается область поиска для устройства определения положения, и можно улучшить характеристику TTFF, чувствительности и точности.
- Предоставление приблизительного времени устройству определения положения, предоставляемого через WWAN. Это могло бы выполняться с помощью работающих часов реального времени в устройстве или предоставляться из внешнего источника. Таким образом, вместе с данными эфемерид, предоставленными или сохраненными в памяти устройства, уменьшается область поиска для устройства определения положения, и можно улучшить характеристику TTFF, чувствительности и точности.
Если оборудованное GNSS устройство не имеет доступа к вспомогательным средствам или не имеет действительных широковещательных данных эфемерид, альманаха, положения или синхронизации, то устройство GNSS должно работать в так называемом автономном режиме. Это означает, что оно должно искать в пространстве частоты, временной задержки и кода PRN, чтобы найти спутники и суметь вычислить положение.
Устройства GNSS довольно часто используются для навигационных целей. Одним вариантом использования могло бы быть то, что человек с UE, оборудованным навигационным устройством (переносной компьютер, смартфон, планшет или любое другое электронное устройство), в котором GNSS не всегда включена, включает навигационное устройство, когда садится в автомобиль. Водителю тогда нужно иметь описание поездки перед тем, как он сможет начать вождение, и выбор направлений в дорожной сети. В этом случае важны TTFF и точность, поскольку навигационное устройство не может предоставить описание поездки, пока не известно положение.
Если навигационное устройство оборудовано вспомогательным средством и приемопередатчиком WWAN или WLAN, который подключен к сети мобильной связи, то это сократит TTFF. Если нет, то навигационное устройство должно работать в автономном режиме.
Как во вспомогательном режиме, так и в автономном режиме TTFF могло бы быть слишком долгим для положительного восприятия пользователем. Причинами могли бы быть низкий уровень сигнала спутника из-за затухания от кузова транспортного средства или отсутствие прямой видимости в городских застройках или в помещении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения - улучшить восприятие времени первого определения местоположения, TTFF, чувствительности и точности для устройства определения положения с помощью Глобальной навигационной спутниковой системы.
Цель настоящего изобретения достигается посредством способа улучшения времени первого определения местоположения, TTFF, чувствительности и точности, в котором устройство определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, взаимодействует с Базовой службой в пользовательском оборудовании,
- причем устройство определения положения с помощью GNSS получает сигналы спутников GNSS и навигационные данные и определяет положение в пределах TTFF на основе упомянутых сигналов/данных,
- и причем Базовая служба обнаруживает пользовательские данные, указывающие определенное поведение пользователя, и инициирует упомянутое определение положения на основе упомянутых пользовательских данных.
Цель настоящего изобретения также достигается посредством Базовой службы, размещенной в UE для улучшения времени первого определения местоположения, TTFF, чувствительности и точности. Базовая служба выполнена с возможностью взаимодействия с устройством определения положения с помощью Глобальной навигационной спутниковой системы, GNSS. Базовая служба выполнена с возможностью обнаружения пользовательских данных, указывающих определенное поведение пользователя UE, и инициирования определения положения в устройстве определения положения с помощью GNSS на основе упомянутых обнаруженных пользовательских данных.
Цель настоящего изобретения также достигается посредством устройства определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, размещенного в UE для улучшения времени первого определения местоположения, TTFF, чувствительности и точности. Устройство определения положения с помощью GNSS выполнено с возможностью взаимодействия с Базовой службой по любому из пунктов 7-13 формулы изобретения. Устройство определения положения с помощью GNSS дополнительно выполнено с возможностью получения сигналов спутников GNSS и данных определения положения и определения положения в пределах TTFF на основе упомянутых сигналов/данных.
Цель настоящего изобретения также достигается посредством Радиомодуля, содержащего устройство (15) определения положения с помощью GNSS по пункту 13, и пользовательского оборудования, UE, содержащего Радиомодуль по любому из пунктов 14-15 формулы изобретения.
Посредством настоящего изобретения получаются несколько преимуществ. Основное преимущество состоит в том, что во многих вариантах использования TTFF будет уменьшаться, а точность определения положения будет улучшаться. Это приведет к более положительному восприятию пользователем встроенного средства по определению положения в UE, приводя к тому, что устройство GNSS и приемопередатчик WWAN или WLAN, если доступен, будут использоваться чаще, с увеличенным преимуществом для конечного пользователя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение далее будет описываться подробнее со ссылкой на прилагаемые чертежи, на которых:
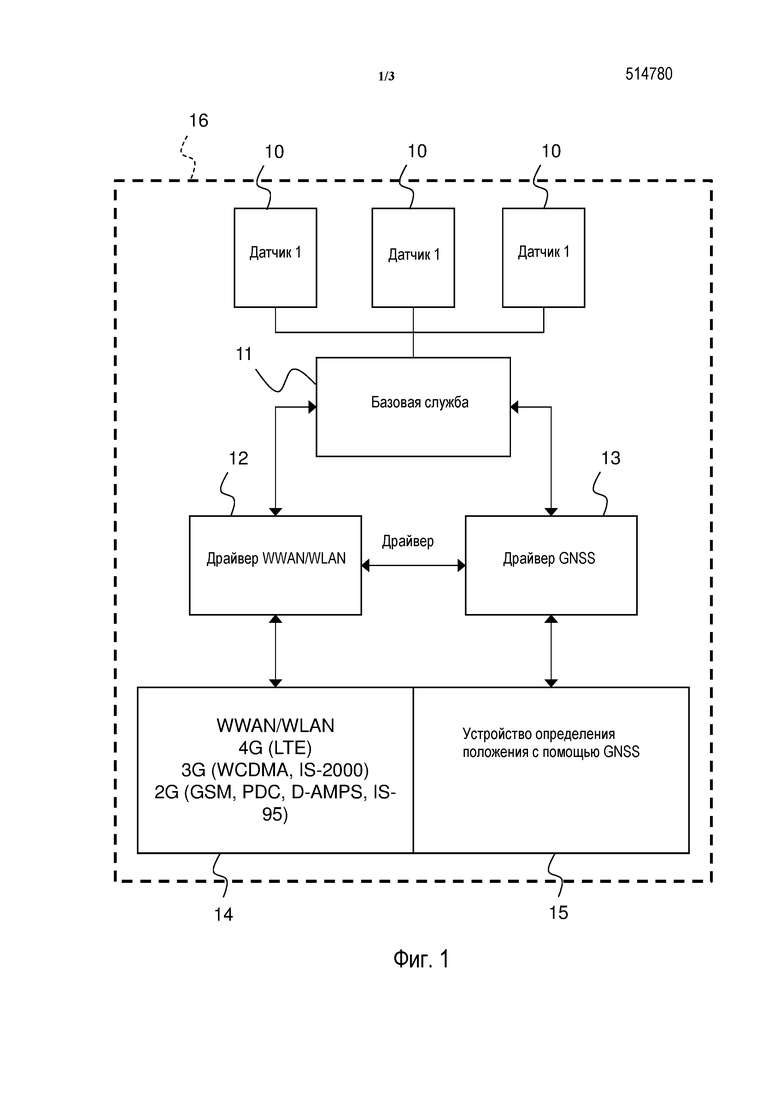
Фиг. 1 схематически показывает блок-схему объектов в пользовательском оборудовании, участвующих в настоящем изобретении;
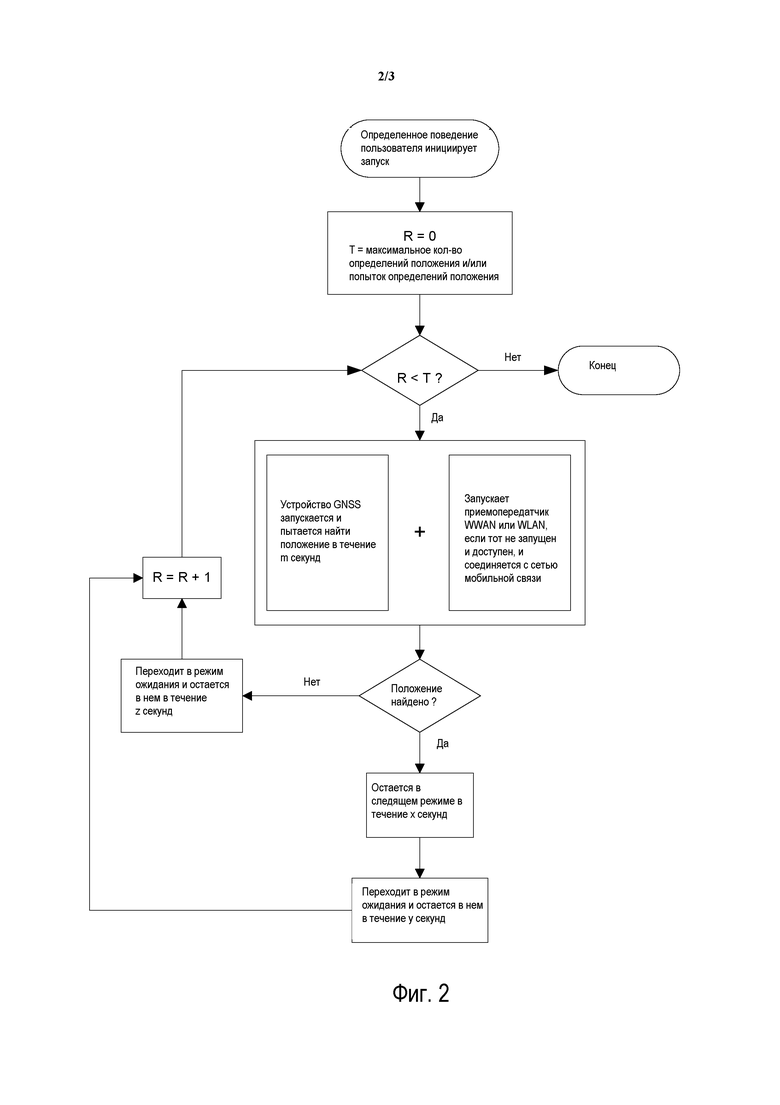
Фиг. 2 показывает блок-схему алгоритма схемы поиска положения в соответствии с настоящим изобретением;
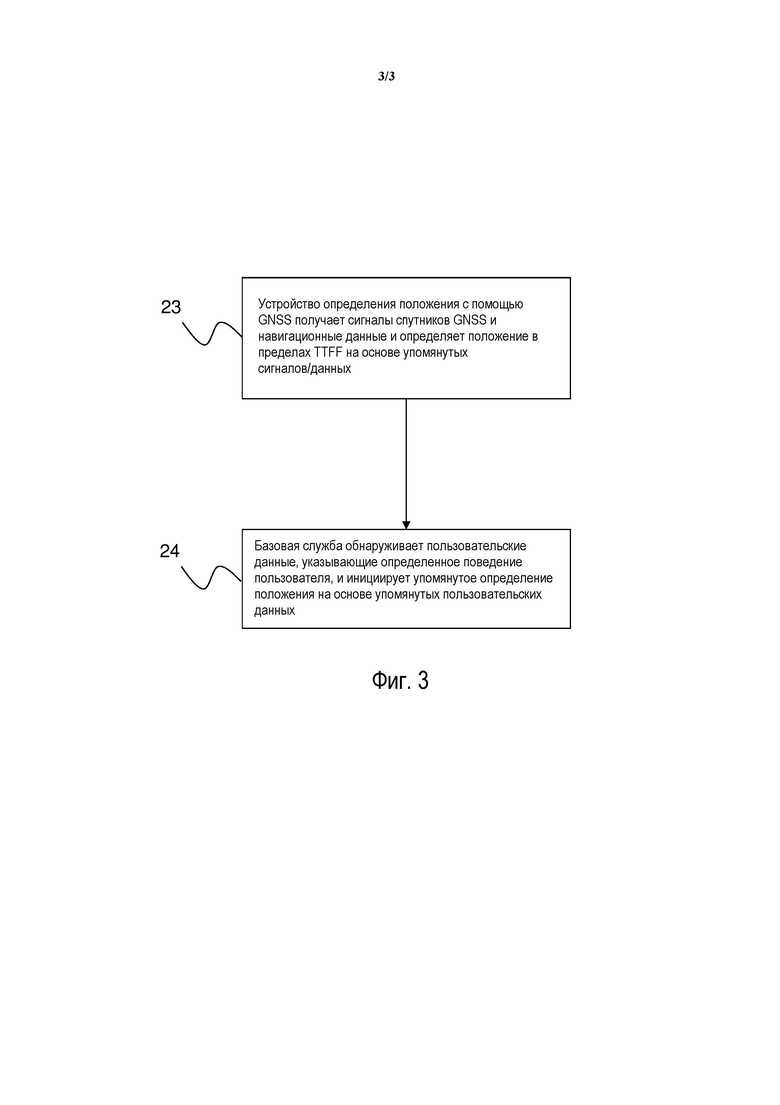
Фиг. 3 показывает блок-схему алгоритма способа в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления изобретения с дополнительными расширениями, описанными ниже, должны рассматриваться только в качестве примеров и никоим образом не ограничивают объем охраны, предоставленный формулой изобретения.
Настоящее изобретение относится к способу улучшения времени первого определения местоположения, TTFF, чувствительности и точности. Настоящее изобретение также относится к Базовой службе, устройству определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, Радиомодулю и Пользовательскому оборудованию, UE, выполненным для той же цели. Даже если подробное описание преимущественно описывает способ, выполняемый разными объектами, специалист в данной области техники понимает, что объекты, выполняемые с возможностью выполнения этого способа, также раскрываются в описании.
Фиг. 1 схематически показывает блок-схему объектов в пользовательском оборудовании 16, UE, участвующих в настоящем изобретении. UE 16 содержит Базовую службу 11, которая также могла бы называться хостом. Базовая служба подключается к разным датчикам 10, которые предоставляют данные Базовой службе. Такой информацией, например, являются пользовательские данные, указывающие определенное поведение пользователя UE. Эти пользовательские данные будут использоваться в настоящем изобретении, как будет описываться ниже.
Базовая служба 11 дополнительно подключается к драйверу 13 GNSS. Если UE 16 оборудовано средством для обеспечения беспроводной связи, то в UE также предоставляются драйверы Беспроводной глобальной сети (WWAN) и/или Беспроводной локальной сети (WLAN). Эти драйверы взаимодействуют друг с другом, чтобы обеспечить обмен данными. В UE также имеется устройство 15 определения положения с помощью GNSS.
Если UE оборудовано Радиомодулем, то этот Модуль содержит устройство 15 определения положения с помощью GNSS. Радиомодуль может дополнительно содержать устройство 14 Беспроводной глобальной сети, WWAN, или Беспроводной локальной сети, WLAN, выполненное с возможностью обеспечения соединения, дающего устройству определения положения с помощью GNSS возможность обращаться к вспомогательным средствам, предоставляющим информацию о спутниках GNSS, используемых для определения положения. Специалист в данной области техники понял бы, что любое средство для обеспечения беспроводной связи с UE, например Bluetooth, является частью настоящего изобретения.
Радиомодули могут монтироваться как дискретные компоненты в гнезде или напаиваться на печатную плату, PCB, либо как отдельная PCM и встроенная в хост-платформу UE 16. Антенны подключаются к функциональным средствам WWAN/WLAN Радиомодуля и устройствам GNSS.
Далее будет описываться способ в соответствии с настоящим изобретением. Цель представленного способа - улучшить время первого определения местоположения, TTFF, чувствительность и точность для устройства определения положения с помощью Глобальной навигационной спутниковой системы. Устройство 15 определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, взаимодействует с Базовой службой 11 в пользовательском оборудовании, UE 16. Выполняются следующие этапы, см. фиг. 3:
1. Устройство определения положения с помощью GNSS получает сигналы спутников GNSS и навигационные данные и определяет положение в пределах TTFF на основе упомянутых сигналов/данных.
2. Базовая служба обнаруживает пользовательские данные, указывающие определенное поведение пользователя, и инициирует упомянутое определение положения на основе упомянутых пользовательских данных.
Основополагающая концепция изобретения - связать определенное поведение пользователя с автоматическим запуском устройства 15 определения положения с помощью GNSS. Когда Базовая служба (Операционная система хоста) в UE (переносной компьютер, смартфон, планшет или любое другое электронное устройство) обнаруживает определенное поведение пользователя, она инициирует определение положения с помощью устройства определения положения с помощью GNSS. Устройство GNSS неактивно до его активации Базовой службой. Это стало осуществимым в последнее время, так как энергопотребление устройств определения положения с помощью GNSS значительно снизилось, соответственно делая возможным этот вид схем работы без неэффективного истощения батареи.
Основное преимущество состоит в том, что во многих вариантах использования TTFF будет уменьшаться, а точность определения положения будет улучшаться. Это приведет к более положительному восприятию пользователем встроенного средства по определению положения в UE, приводя к тому, что устройство GNSS и приемопередатчик WWAN или WLAN, если доступен, будут использоваться чаще, с увеличенным преимуществом для конечного пользователя.
Базовая служба 11 отправляет команду запуска устройству 15 определения положения с помощью GNSS, чтобы инициировать упомянутое определение положения. Пользовательские данные заключаются в обнаружении открытия чехла, обнаружении мощности батареи, обнаружении док-станции или обнаружении изменения ускорения для UE 16. Данные предоставляются посредством датчиков 10, проиллюстрированных на фиг. 1. Датчики обычно являются такими датчиками, как акселерометр, средство обнаружения стыковки, детектор чехла, детектор источника питания и детектор отсоединения мыши, и т.п. Датчик может быть дискретными компонентами в UE или сигналами, сформированными в других компонентах UE. Поэтому специалист в данной области техники понимает, что любое средство, формирующее упомянутые пользовательские данные, включается в настоящее изобретение.
Базовая служба 11 может установить автономный режим при инициировании упомянутого определения положения. Автономный режим содержит поиск в пространстве частоты, временной задержки и кода псевдослучайного шума, PRN, чтобы найти спутники GNSS, используемые для определения положения.
Когда UE оборудовано функциональными возможностями 14 WWAN или WLAN, Базовая служба 11 также может инициировать установление соединения по Беспроводной глобальной сети, WWAN, или Беспроводной локальной сети, WLAN, при инициировании упомянутого определения положения. Это соединение дает возможность устройству определения положения с помощью GNSS обращаться к вспомогательным средствам, предоставляющим информацию, используемую по меньшей мере для определения положения. Пользовательские данные тогда могут заключаться в изменении отфильтрованной по низким частотам Индикации уровня принимаемого сигнала, RSSI, или изменении идентификатора радиосоты для соединения WWAN или WLAN.
Информация этих вспомогательных средств GNSS необходима для улучшения характеристики времени первого определения местоположения (TTFF), чувствительности и точности касательно данных определения положения. Эта информация вспомогательных средств могла бы принадлежать к следующим видам:
- Снабжение устройства определения положения информацией о положениях спутников GNSS для заданного момента в будущем, отклонениях эталона времени спутника, кодах PRN (псевдослучайный шум) для спутников и т.п. Все вместе это называется данными эфемерид и календаря. Эта информация отправляется через беспроводную сеть, и поэтому устройство должно быть оборудовано приемопередатчиком WWAN (Беспроводная глобальная сеть) или WLAN (Беспроводная локальная сеть), чтобы иметь возможность взаимодействовать с сетью мобильной связи и принимать упомянутые данные.
- Предоставление приблизительного положения с использованием информации, предоставленной тем, к какой базовой станции в сети мобильной связи подключается устройство в случае, когда устройство оборудовано приемопередатчиком WWAN. Таким образом, вместе с данными эфемерид, предоставленными или сохраненными в памяти устройства, уменьшается область поиска для устройства определения положения, и можно улучшить характеристику TTFF, чувствительности и точности.
- Предоставление приблизительного времени устройству определения положения, предоставляемого через WWAN. Это могло бы выполняться с помощью работающих часов реального времени в устройстве или предоставляться из внешнего источника. Таким образом, вместе с данными эфемерид, предоставленными или сохраненными в памяти устройства, уменьшается область поиска для устройства определения положения, и можно улучшить характеристику TTFF, чувствительности и точности.
Фиг. 2 показывает блок-схему алгоритма схемы поиска положения в соответствии с настоящим изобретением. Когда возникает поведение пользователя, устройство 15 определения положения с помощью GNSS и приемопередатчик WWAN или WLAN, если доступен, автоматически запускаются и начинают искать положение устройства GNSS. В этом процессе новые вспомогательные данные будут загружаться при необходимости (если доступен беспроводной доступ), в то же время GNSS начинает искать спутники. Загружаются такие данные, как идентификатор выбранной соты, грубое время и грубое положение. Если никакое положение не найдено в течение определенного интервала времени, то режим поиска прекратится на некий период времени. После того как прошло некоторое время, устройство GNSS и приемопередатчик WWAN или WLAN, если доступен, автоматически возобновят поиск положения. Эти схемы работы могут продолжаться подходящее количество раз.
Все интервалы времени, которые можно было бы задать, выбираются совершенно свободно. Таким образом, устройство определения положения с помощью GNSS по возможности может искать положение, когда условия благоприятны, например, когда пользователь идет на улице под безоблачным небом с хорошим доступом к сигналам спутников GNSS. Тогда, когда пользователю нужно узнать его положение, например, когда запрашивается описание поездки, TTFF будет очень коротким, в диапазоне нескольких секунд. Поскольку последнее известное положение и свежие данные эфемерид будут сохранены в энергонезависимой памяти устройства GNSS, область поиска в частоте, временной задержке и коде PRN будет очень ограниченной, соответственно делая возможным короткое TTFF.
Настоящее изобретение не ограничивается вышеприведенными примерами, а может свободно меняться в рамках объема формулы изобретения. Кроме того, некоторые компоненты могут исключаться, и могут добавляться некоторые, соответственно не показанные, компоненты.
Изобретение относится к области радионавигации. Техническим результатом является сокращение времени первого определения местоположения, TTFF, в пользовательском оборудовании, определяющем положение с помощью Глобальной навигационной спутниковой системы, GNSS. Упомянутый технический результат достигается тем, что
устройство (15) определения положения с помощью GNSS взаимодействует с Базовой службой (11) в пользовательском оборудовании (16), UE, причем устройство определения положения с помощью GNSS получает (23) сигналы спутников GNSS и навигационные данные и определяет положение в пределах TTFF на основе упомянутых сигналов/данных, и причем Базовая служба обнаруживает (24) пользовательские данные, указывающие определенное поведение пользователя, и инициирует упомянутое определение положения на основе упомянутых пользовательских данных. 5 н. и 11 з.п. ф-лы, 3 ил.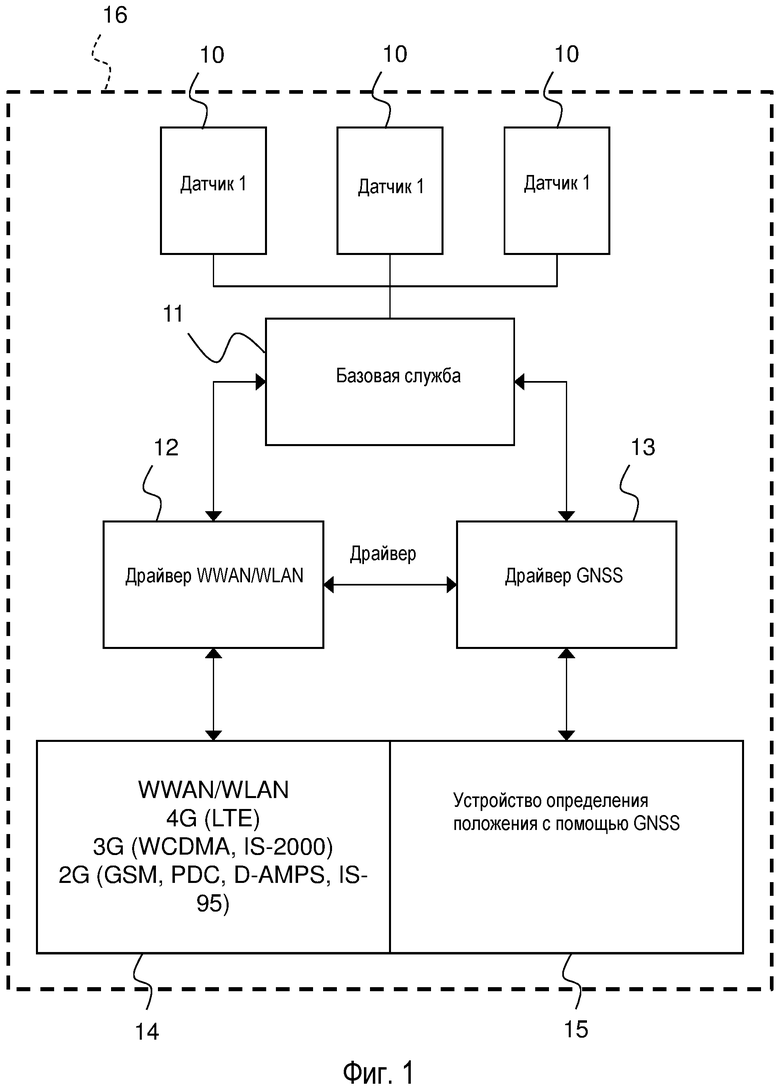
1. Способ сокращения времени первого определения местоположения, TTFF, в котором устройство (15) определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, взаимодействует с Базовой службой (11) в пользовательском оборудовании (16), UE,
причем устройство (15) определения положения с помощью GNSS получает (23) сигналы спутников GNSS и навигационные данные и определяет положение в пределах TTFF на основе упомянутых сигналов/данных,
причем Базовая служба (11) обнаруживает (24) пользовательские данные, указывающие изменения состояния UE, которые обнаруживаются датчиками UE, и инициирует упомянутое определение положения на основе упомянутых пользовательских данных,
причем изменение состояния UE заключается в обнаружении открытия чехла, обнаружении мощности батареи и/или обнаружении док-станции.
2. Способ по п. 1, в котором Базовая служба (11) отправляет команду запуска устройству определения положения с помощью GNSS, чтобы инициировать упомянутое определение положения.
3. Способ по п. 1, в котором изменение состояния UE дополнительно заключается в обнаружении изменения ускорения для UE (16).
4. Способ по п. 1, в котором Базовая служба (11) также инициирует установление соединения по Беспроводной глобальной сети, WWAN, или Беспроводной локальной сети, WLAN, при
инициировании упомянутого определения положения, причем соединение дает устройству (15) определения положения с помощью GNSS возможность обращаться к вспомогательным средствам, предоставляющим информацию, используемую по меньшей мере для определения положения.
5. Способ по п. 4, в котором изменение состояния UE дополнительно заключается в изменении отфильтрованной по низким частотам Индикации уровня принимаемого сигнала, RSSI, или изменении идентификатора радиосоты для соединения WWAN или WLAN.
6. Способ по любому из предшествующих пунктов, в котором Базовая служба (11) устанавливает автономный режим при инициировании упомянутого определения положения, причем упомянутый автономный режим содержит поиск в пространстве частоты, временной задержки и кода псевдослучайного шума, PRN, чтобы найти спутники GNSS, используемые для определения положения.
7. Базовая служба (11), размещенная в UE для сокращения времени первого определения местоположения, TTFF, причем Базовая служба (11) выполнена с возможностью взаимодействия с устройством (15) определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, отличающаяся тем, что
Базовая служба (11) выполнена с возможностью обнаружения пользовательских данных, указывающих изменения состояния UE, которые обнаруживаются датчиками UE, и инициирования определения положения в устройстве (15) определения положения с помощью GNSS на основе упомянутых обнаруженных пользовательских данных,
причем изменение состояния UE заключается в обнаружении открытия чехла, обнаружении мощности батареи и/или обнаружении док-станции.
8. Базовая служба (11) по п. 7, причем Базовая служба (11) выполнена с возможностью отправки команды запуска устройству (15) определения положения с помощью GNSS, чтобы инициировать упомянутое определение положения.
9. Базовая служба (11) по п. 7, в которой изменение состояния UE дополнительно заключается в обнаружении изменения ускорения для UE.
10. Базовая служба (11) по п. 7, причем Базовая служба (11) также выполнена с возможностью инициирования установления соединения по Беспроводной глобальной сети, WWAN, или Беспроводной локальной сети, WLAN, при инициировании упомянутого определения положения, причем соединение дает устройству (15) определения положения с помощью GNSS возможность обращаться к вспомогательным средствам, предоставляющим информацию, используемую по меньшей мере для определения положения.
11. Базовая служба (11) по п. 10, в которой изменение состояния UE дополнительно заключается в изменении отфильтрованной по низким частотам Индикации уровня принимаемого сигнала, RSSI, или изменении идентификатора радиосоты для соединения WWAN или WLAN.
12. Базовая служба (11) по любому из пп. 7-11, причем Базовая служба (11) выполнена с возможностью установления автономного режима при инициировании упомянутого определения положения UE, причем упомянутый автономный режим содержит поиск в пространстве частоты, временной задержки и кода псевдослучайного шума, PRN, чтобы найти спутники GNSS, используемые для определения положения.
13. Устройство (15) определения положения с помощью Глобальной навигационной спутниковой системы, GNSS, размещенное в UE для сокращения времени первого определения местоположения, TTFF, причем устройство (15) определения положения с помощью GNSS выполнено с возможностью взаимодействия с Базовой службой (11) по любому из пп. 7-11, причем устройство (15) определения положения с помощью GNSS дополнительно выполнено с возможностью получения сигналов спутников GNSS и данных определения положения, и определения положения в пределах TTFF на основе упомянутых сигналов/данных.
14. Радиомодуль, содержащий устройство (15) определения положения с помощью GNSS по п. 13.
15. Радиомодуль по п. 14, причем Радиомодуль дополнительно содержит устройство Беспроводной глобальной сети, WWAN, или Беспроводной локальной сети, WLAN, выполненное с возможностью обеспечения соединения, дающего устройству определения положения с помощью GNSS возможность обращаться к вспомогательным средствам, предоставляющим информацию о спутниках GNSS, используемых для определения положения.
16. Пользовательское оборудование, UE, содержащее Радиомодуль по любому из пп. 14-15.
| US2009098880 А1, 16.04.2009 | |||
| US2008266174 A1, 30.10.2008 | |||
| RU2009130399 A,20.02.2011 | |||
| JP2011228788 A, 10.11.2011 | |||
| RU2010114291 A, 20.10.2011. |

