Изобретение относится к строительству канатных дорог с увеличенными пролетами между опорами, в частности к способам монтажа тяжелого гибкого элемента (несущего каната) с использованием вертолета.
Известен способ монтажа гибкого элемента с помощью вертолета, заключающийся в том, что гибкий элемент заданной длины перегибают на земле вдвое, в месте перегиба устанавливают ролик, а оба конца гибкого элемента прикрепляют к грузу. На опорах устанавливают блоки с переброшенными через них тросами тяговых механизмов, установленных перед первой и за последующей опорами. Ролик с гибким элементом подцепляют к внешней подвеске вертолета, поднимают с земли и транспортируют образовавшуюся петлю гибкого элемента к месту монтажа. При зависании вертолета над местом монтажа после отцепки груза, подсоединения концов петли к тяговым механизмам и предварительного натяжения гибкого элемента производят отцепку вертолета, а затем выполняют окончательное натяжение гибкого элемента тяговыми механизмами (патент РФ №2064214, кл. H02G 1/02, 1996). Способ обеспечивает возможность монтажа гибкого элемента, например провода линий электропередачи (ЛЭП), в непроходимых для наземной техники пролетах и исключает контакт провода с препятствиями, находящимися в пролете.
Однако этот способ не может быть применен при увеличенной длине пролета между опорами, т.к., чтобы подать концы петли в заданное место, вертолету необходимо зависнуть на большой высоте (больше или равной длине вдвое согнутого на ролике гибкого элемента). Например, при пролетах длиной более 500 м вертолет должен зависнуть на высотах свыше 250 м. При этом экипаж физически не сможет выполнить точное зависание и необходимые при монтаже операции из-за плохой видимости места монтажа на земле (максимальная высота монтажного висения вертолета по нормативам составляет не более 50 м, а наиболее способные пилоты могут работать до 100 м).
Известен также наиболее близкий по технической сущности способ монтажа гибкого элемента, при котором с помощью вертолета выполняют основные монтажные операции, а в качестве вспомогательного - поддерживающего - средства используют второй вертолет (патент РФ №2091944, кл. H02G 1/02, 1997). Этот способ заключается в том, что перед первой и за последующей опорами закрепляют на земле тяговые механизмы, а гибкий элемент, связанный с внешней подвеской вертолета и тяговым механизмом перед первой опорой, выпускают из устройства с запасом гибкого элемента и укладывают на траверсу первой опоры. Затем перемещением вертолета раскатывают гибкий элемент в пролете между опорами с использованием поддерживающего средства (второго вертолета) с роликом, а после укладки гибкого элемента на траверсу последующей опоры его присоединяют ко второму тяговому механизму и производят натяжение гибкого элемента.
При выполнении работ по данному способу устройство с запасом гибкого элемента (например, раскаточное устройство с барабаном, на котором намотан гибкий элемент) присоединяют к внешней подвеске вертолета. При перемещении вертолета в пролете под действием силы веса раскатанного гибкого элемента и силы его натяжения внешняя подвеска вертолета отклонится от вертикали на угол φ. При боковом перемещении вертолета (которое необходимо в данном случае для обеспечения командиру вертолета обзора раскатываемого гибкого элемента) этот угол φ не должен превышать 15°. При большем угле φ на вертолет может действовать опрокидывающий момент. С целью недопущения такой опасной ситуации в известном способе использовано поддерживающее средство (второй вертолет), которое берет на себя часть силы веса гибкого элемента.
Однако известный способ с применением двух вертолетов имеет недостатки.
Во-первых, работа пары вертолетов на небольшом расстоянии друг от друга является уникальной и весьма опасной, т.к. сопряжена с большим риском нарушения параметров безопасного полета (тем более вертолетов, связанных между собой непредсказуемым гибким элементом). Поэтому такая парная работа вертолетов может быть только в исключительных случаях, с длительными и трудоемкими тренировками экипажей.
Во-вторых, по мере раскатывания гибкого элемента его масса в пролете увеличивается, а его запас (масса) в раскаточном устройстве на внешней подвеске вертолета уменьшается. Соответственно из-за снижения веса груза на внешней подвеске вертолета вертикальная составляющая сил, действующих на внешнюю подвеску, уменьшается, а горизонтальная составляющая растет. В больших пролетах такое взаимопротивоположное изменение сил может привести к их критическому соотношению, при котором угол φ может быть выше допустимого. Эта опасность возрастает не только при увеличении длины пролета, но и при увеличении погонной массы гибкого элемента. Такая ситуация особенно актуальна при монтаже канатных дорог, т.к. в этом случае приходится работать со стальным канатом, у которого погонная масса почти в два раза больше, чем у провода ЛЭП (при одинаковом диаметре).
В-третьих, одновременное использование двух вертолетов не всегда возможно из-за отсутствия у авиапредприятия свободных вертолетов или двух высокопрофессиональных экипажей, которые необходимы для такой работы.
Кроме того, немаловажным фактором при осуществлении известного способа является экономическая сторона дела: для заказчика работ могут быть нежелательны дополнительные затраты на содержание второго вертолета и второго экипажа.
Задачей предлагаемого способа является достижение технического результата, выражающегося в возможности монтажа тяжелого гибкого элемента в протяженных пролетах с использованием только одного вертолета.
Сущность изобретения состоит в способе монтажа гибкого элемента с помощью вертолета, преимущественно в больших пролетах, заключающемся в том, что перед первой и за последующей опорами закрепляют на земле тяговые механизмы, гибкий элемент, связанный с внешней подвеской вертолета и тяговым механизмом перед первой опорой, выпускают из устройства с запасом гибкого элемента и укладывают на траверсу первой опоры, перемещением вертолета раскатывают гибкий элемент в пролете между опорами с использованием поддерживающего средства с роликом, а после укладки гибкого элемента на траверсу последующей опоры его присоединяют ко второму тяговому механизму и производят натяжение гибкого элемента, отличающемся тем, что между опорами предварительно раскатывают вертолетом и закрепляют на опорах вспомогательный трос, который затем используют в качестве поддерживающего средства, причем запас гибкого элемента размещают на барабане тягового механизма перед первой опорой, конец гибкого элемента присоединяют к грузу, закрепленному на внешней подвеске вертолета, а после укладки вертолетом гибкого элемента на траверсу первой опоры на вспомогательный трос за траверсой устанавливают ролик с возможностью качения, фиксируют ролик на гибком элементе, после чего продолжают движение вертолета в пролете между опорами, при прохождении вертолетом части пролета на вспомогательный трос устанавливают дополнительный ролик с фиксацией на гибком элементе и продолжают раскатку, при подходе ролика к последующей опоре и после снижения вертолета конец гибкого элемента отсоединяют от груза и присоединяют ко второму тяговому механизму, демонтируют ролик, производят натяжение гибкого элемента и демонтируют дополнительный ролик.
При осуществлении предлагаемого способа могут быть применены несколько дополнительных роликов в количестве, необходимом и достаточном для исключения разрушения вспомогательного троса и обеспечения равномерной нагрузки на него от гибкого элемента.
Кроме того, после укладки гибкого элемента на траверсу второй опоры вертолет может продолжать раскатку гибкого элемента с использованием ролика или без него в следующих пролетах: до третьей, четвертой и последующей опоры, за которой установлен второй тяговый механизм.
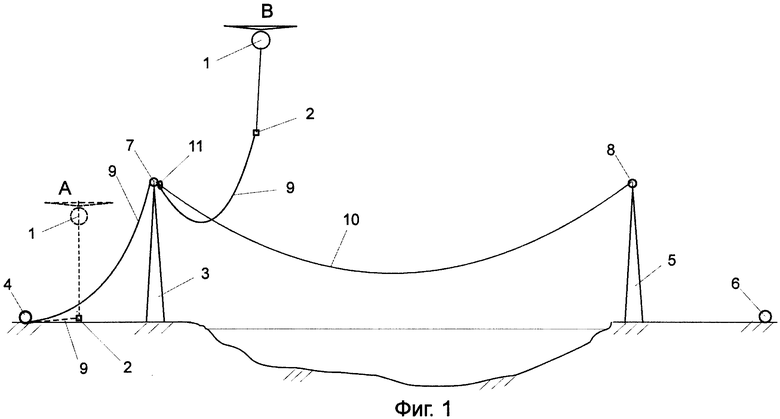
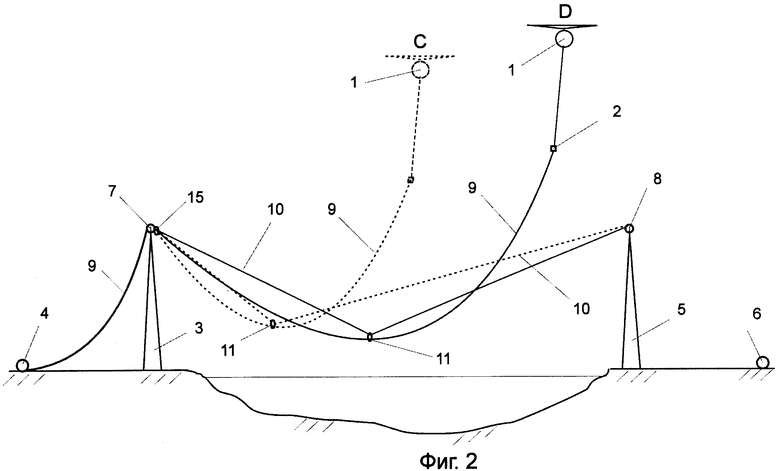
На фиг.1-3 показана последовательность операций;
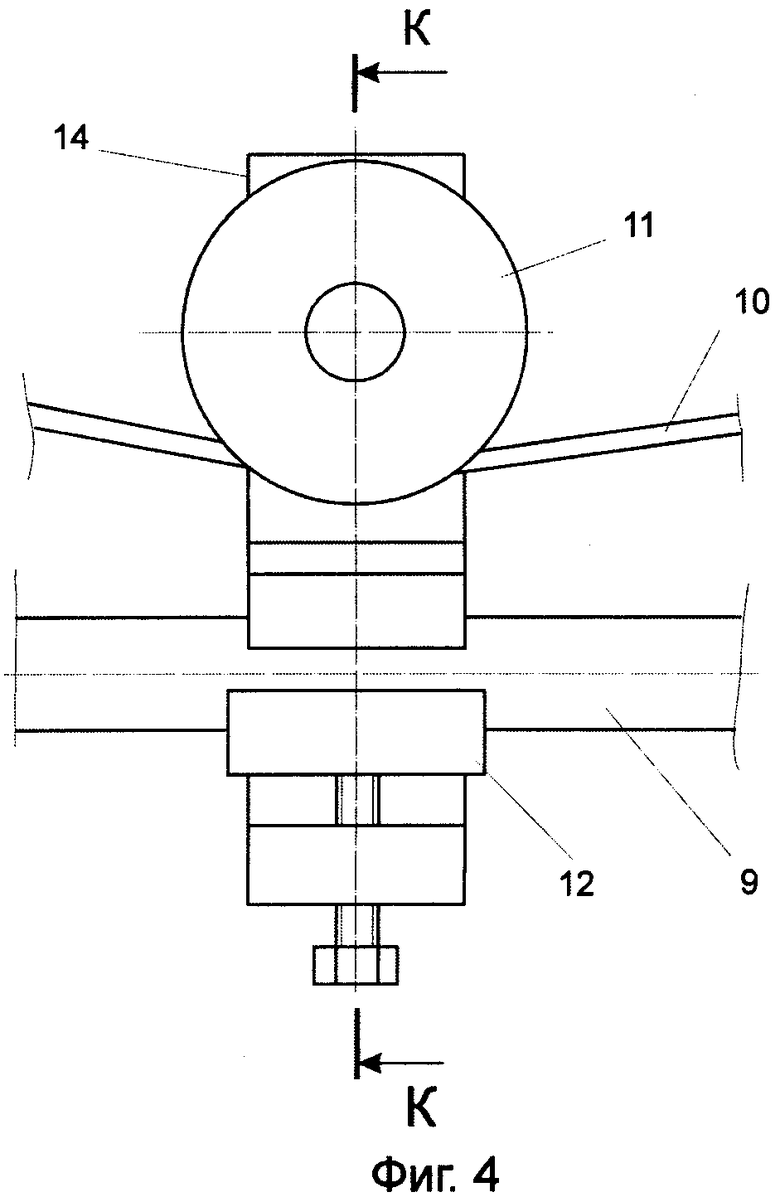
на фиг.4 показана схема установки ролика;
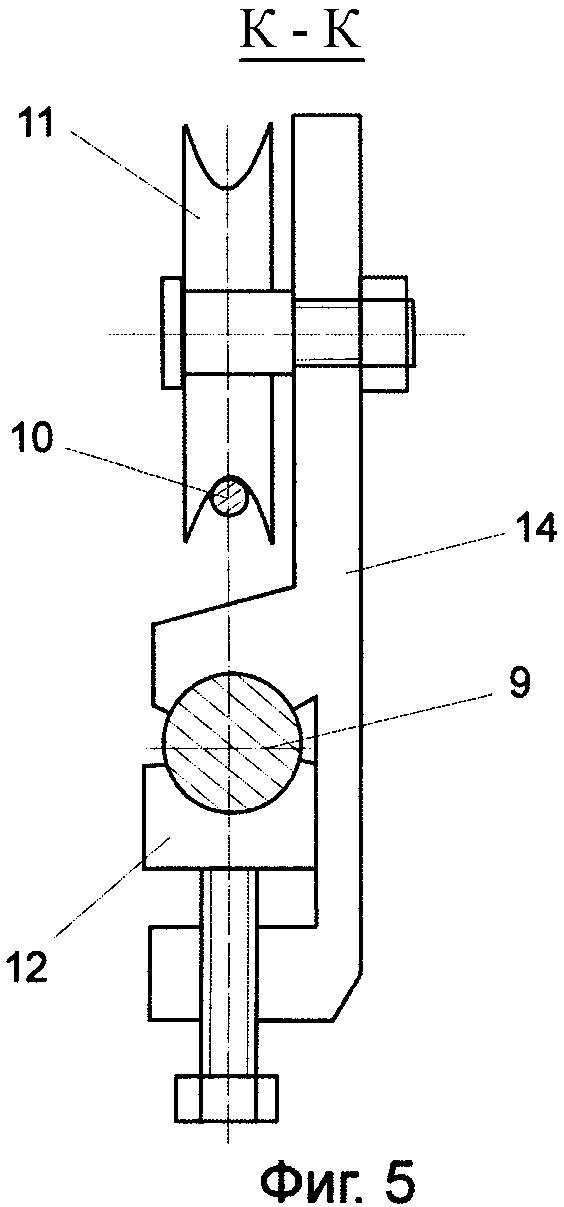
на фиг.5 - вид К по фиг.4.
Для реализации предлагаемого способа используют один вертолет 1, к внешней подвеске которого прикрепляют груз 2.
На земле перед первой опорой 3 закрепляют тяговый механизм, например лебедку 4, а за второй опорой 5 - лебедку 6. На траверсах опор закрепляют блоки 7 и 8. На барабан лебедки 4 наматывают необходимый запас гибкого элемента 9, а на барабане лебедки 6 - технологический канат.
Предварительно, перед раскаткой гибкого элемента 9, выполняют подготовительные работы. Сначала около опоры 3 раскладывают на земле вспомогательный трос 10. Этот трос заранее подбирают по расчетным характеристикам (прочности и погонной массе) исходя из того, чтобы его общая масса при натяжении вертолетом в пролете между опорами 3 и 5 исключала опасные углы φ отклонения внешней подвески. Кроме того, длина вспомогательного троса 10 подбирается такой, чтобы обеспечить его провисание в пролете, близкое к проектному положению гибкого элемента 9. Один конец вспомогательного троса 10 поднимают и закрепляют на опоре 3 выше блока 7, а противоположный конец присоединяют к грузу 2. Перемещением вертолета 1 в пролете протягивают вспомогательный трос 10 до опоры 5, на которой выше блока 8 закрепляют второй его конец и отсоединяют от груза 2.
Затем начинают работы с гибким элементом 9. При зависании вертолета 1 около лебедки 4 (положение А на фиг.1) присоединяют к грузу 2 конец гибкого элемента 9, выпущенного с барабана этой лебедки. Включением лебедки 4 выпускают гибкий элемент 9, а перемещением вертолета 1 вверх и за опору 3 выбирают слабину и укладывают гибкий элемент 9 в ручей блока 7 (положение В на фиг.1). Остановив вертолет 1 и лебедку 4, на вспомогательный трос 10 за траверсой опоры 3 устанавливают ролик 11 с возможностью качения, а зажимом 12 фиксируют гибкий элемент 9 к роликовой подвеске 14 (фиг.4 и 5). При включении лебедки 4 дальнейшим смещением вертолета 1 протягивают гибкий элемент 9 в пролете. Ролик 11, перекатываясь по вспомогательному тросу 10, поддерживает гибкий элемент 9. Поэтому сила веса раскатанного гибкого элемента 9 передается на вспомогательный трос 10. В результате разгружается внешняя подвеска вертолета 1, а на груз 2 действует усилие, необходимое для преодоления сил трения в блоке 7, ролике 11 и натяжения участка гибкого элемента 9, расположенного между роликом 11 и грузом 2.
При приближении ролика 11 к середине пролета вертолет 1 и лебедку 4 останавливают (положение D на фиг.2), за траверсой опоры 3 на вспомогательный трос 10 подвешивают дополнительный ролик 15, аналогичный ролику 11. Дополнительный ролик 15 также фиксируют на гибком элементе 9. После этого продолжают раскатку гибкого элемента 9 до касания им ручья блока 8 на опоре 5. При подходе ролика 11 к опоре 5 его снимают, а дополнительный ролик 15 находится в пролете между опорами. От него в одной точке на вспомогательный трос 10 передается вес раскатанного гибкого элемента 9. Для более равномерного распределения по вспомогательному тросу 10 веса гибкого элемента 9 можно применить несколько дополнительных роликов 15. Это обеспечит снижение точечных нагрузок на вспомогательный трос 10 (положение Е на фиг.3). Поэтому можно использовать трос с меньшим сечением. Дополнительные ролики 15 устанавливают при меньших шаговых перемещениях вертолета 1 от опоры 3 (положение С на фиг.2).
Снижением вертолета 1 перегибают гибкий элемент 9 на блоке 8 и ставят груз 2 на землю около лебедки 6 (положение F на фиг.3). Конец гибкого элемента 9 присоединяют к технологическому канату лебедки 6, которой производят предварительное натяжение до разгрузки внешней подвески вертолета 1. При этом вертолетом 1 отслеживают положение груза 2. Предварительное натяжение заканчивают, когда сила тяжения от гибкого элемента 9 полностью передается на лебедку 6, а на внешнюю подвеску действует только сила веса груза 2. С борта вертолета производят отцепку груза 2 от гибкого элемента 9 и направляют вертолет 1 с грузом 2 на посадку. После отлета вертолета выполняют окончательное (проектное) натяжение гибкого элемента 9, подтягивая его концы лебедками 4 и 6.
После натяжения гибкого элемента 9 вспомогательный трос 10 можно использовать в эксплуатационных целях, например в качестве грозотроса, технологического каната для служб спасения и пр. При отсутствии такой необходимости вспомогательный трос 10 с дополнительными роликами 15 демонтируют.
Вследствие того что в предлагаемом способе запас гибкого элемента 9 (переменную массу) размещают на земле (на лебедке 4), а на внешней подвеске вертолета 1 закрепляют груз 2 (постоянную массу), то в процессе работы соотношение горизонтальной и вертикальной составляющих сил, действующих на внешнюю подвеску вертолета, будет изменяться незначительно. Причем вертикальная составляющая будет практически неизменной при раскатке гибкого элемента 9 в пролете (а не уменьшаться, как в прототипе), поскольку груз 2 постоянен по массе, так же, как и масса небольшого участка гибкого элемента 9 между роликом 11 и вертолетом 1. В свою очередь горизонтальная составляющая будет расти незначительно, т.к. нет ее основного растущего компонента от силы натяжения, пропорциональной весу раскатанного в пролете гибкого элемента 9 (его вес полностью воспринимается вспомогательным тросом 10 через ролики 11 и 15). Эта горизонтальная составляющая равна только силам сопротивления перекатыванию гибкого элемента 9 в блоке 7 и на роликах 11 и 15 по вспомогательному тросу 10. Поэтому горизонтальная составляющая всегда будет значительно меньше вертикальной. В результате угол φ отклонения внешней подвески от вертикали на первых участках пролета будет небольшим, а к концу пролета будет увеличиваться, но не выходить за допустимые пределы.
С учетом вышесказанного, из-за снижения нагрузок на вертолет при необходимости можно продолжить монтаж гибкого элемента 9 в нескольких следующих пролетах. Для этого предварительно раскатывают вспомогательный трос 10 не только в первом, но и в последующих пролетах, а второй тяговый механизм 6 устанавливают за крайней опорой. Тогда после укладки гибкого элемента 9 на траверсу второй опоры 5 вертолет 1 может продолжать его раскатку с использованием роликов 11 и 15 в следующих пролетах до крайней опоры, за которой установлен второй тяговый механизм. Продолжать раскатку можно до приближения угла φ к допустимой величине.
Предлагаемый способ монтажа гибкого элемента может быть использован в пролетах, непроходимых для наземной техники из-за сложного рельефа или по иным причинам, например при прокладывании трасс в заповедных районах, где нежелательна вырубка лесов и другие воздействия на природу.
Предлагаемый способ обеспечивает сокращение материальных и временных затрат на монтаж тяжелого несущего каната (большого диаметра), который обычно применяют в протяженных пролетах канатных дорог. Экономия материальных затрат по сравнению с прототипом складывается из-за отсутствия необходимости применения второго вертолета. В общем случае экономически целесообразнее применение предлагаемого способа по сравнению с вариантами расчистки трассы и строительства дорог для наземной техники.
Кроме того, этот способ обеспечивает безопасность полетов на вертолете, выполняющем такие сложные работы, т.к. нет второго вертолета и исключено возникновение опасного опрокидывающего момента. Полеты вертолета можно выполнять на оптимальных для обзора экипажем (небольших) высотах, т.к. нет необходимости в наборе большой высоты для исключения зацепов гибкого элемента за наземные препятствия, поскольку гибкий элемент в процессе раскатки не может опуститься ниже проектного положения из-за роликового подвеса к вспомогательному тросу.
Предлагаемый способ может быть использован также при сооружении подвесных мостов, кабель-кранов, на аварийно-восстановительных и других работах в сложных условиях.
Способ монтажа гибкого элемента с помощью вертолета может быть использован при сооружении канатных дорог преимущественно с большими пролетами. Перед монтажом раскатывают вертолетом и закрепляют на опорах вспомогательный трос, который затем используют в качестве поддерживающего средства при раскатке гибкого элемента. Запас гибкого элемента размещают на барабане тягового механизма перед первой опорой, а конец гибкого элемента присоединяют к грузу, закрепленному на внешней подвеске вертолета. После укладки вертолетом гибкого элемента на траверсу первой опоры на вспомогательный трос за траверсой устанавливают ролик с возможностью качения и фиксируют ролик на гибком элементе. При прохождении вертолетом части пролета на вспомогательный трос устанавливают дополнительный ролик с фиксацией на гибком элементе и продолжают раскатку. При подходе ролика к последующей опоре его снимают. После укладки гибкого элемента на траверсу последующей опоры и снижения вертолетом груза конец гибкого элемента присоединяют ко второму тяговому механизму, установленному за последующей опорой. Гибкий элемент отсоединяют от груза и демонтируют ролик. Затем производят натяжение гибкого элемента тяговыми механизмами. Количество дополнительных роликов подбирают из условия прочности вспомогательного троса. Демонтируют дополнительные ролики по мере их приближения к последующей опоре. Существенно снижаются нагрузки на вертолет и уменьшаются затраты на монтажные работы. 2 з.п. ф-лы, 5 ил.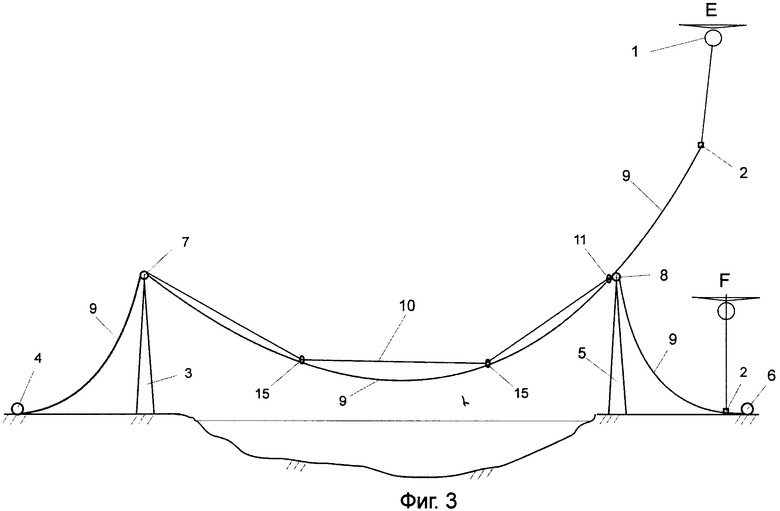
1. Способ монтажа гибкого элемента с помощью вертолета, преимущественно в больших пролетах, заключающийся в том, что перед первой и за последующей опорами закрепляют на земле тяговые механизмы, гибкий элемент, связанный с внешней подвеской вертолета и тяговым механизмом перед первой опорой, выпускают из устройства с запасом гибкого элемента и укладывают на траверсу первой опоры, перемещением вертолета раскатывают гибкий элемент в пролете между опорами с использованием поддерживающего средства с роликом, а после укладки гибкого элемента на траверсу последующей опоры и снижения вертолета конец гибкого элемента присоединяют ко второму тяговому механизму и производят натяжение гибкого элемента, отличающийся тем, что между опорами предварительно раскатывают вертолетом и закрепляют на опорах вспомогательный трос, который затем используют в качестве поддерживающего средства, причем запас гибкого элемента размещают на барабане тягового механизма перед первой опорой, конец гибкого элемента присоединяют к грузу, закрепленному на внешней подвеске вертолета, а после укладки вертолетом гибкого элемента на траверсу первой опоры на вспомогательный трос за траверсой устанавливают ролик с возможностью качения, фиксируют ролик на гибком элементе, после чего продолжают движение вертолета в пролете между опорами, при прохождении вертолетом части пролета на вспомогательный трос устанавливают дополнительный ролик с фиксацией на гибком элементе и продолжают раскатку, при подходе к последующей опоре демонтируют ролик и после снижения вертолета конец гибкого элемента отсоединяют от груза и присоединяют ко второму тяговому механизму, производят натяжение гибкого элемента и демонтируют дополнительный ролик.
2. Способ по п.1, отличающийся тем, что применяют несколько дополнительных роликов в количестве, необходимом и достаточном для исключения разрушения вспомогательного троса и обеспечения равномерной нагрузки на него от гибкого элемента.
3. Способ по п.1 или 2, отличающийся тем, что после укладки гибкого элемента на траверсу второй опоры продолжают раскатку вертолетом гибкого элемента с использованием роликов или без них до последующей опоры, за которой установлен второй тяговый механизм.
| RU 2064214 С1, 20.07.1996 | |||
| СПОСОБ МОНТАЖА ПРОВОДА С ПОМОЩЬЮ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1996 |
|
RU2091944C1 |
| РЕКОНСТРУИРОВАННЫЙ АНКЕРНЫЙ ПРОЛЕТ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И СПОСОБ РЕКОНСТРУКЦИИ АНКЕРНОГО ПРОЛЕТА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2003 |
|
RU2230412C1 |
| СПОСОБ МОНТАЖА ПРОВОДА С ПОМОЩЬЮ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1998 |
|
RU2153748C1 |
| СПОСОБ ФОРМИРОВАНИЯ НЕОТИМПАНАЛЬНОЙ МЕМБРАНЫ ПРИ ТИМПАНОПЛАСТИКЕ | 2005 |
|
RU2289377C1 |
| US 6769514 В2, 03.08.2004. | |||

