УРОВЕНЬ ТЕХНИКИ
Ссылка на находящиеся одновременно на рассмотрении заявки на патент
Настоящая заявка испрашивает приоритет согласно § 119 раздела 35 Кодекса США по предварительной заявке на патент США, порядковый номер 61/052,973, озаглавленной "TWO DIMENSIONAL SEARCH FOR GERAN OPTIMAL TIMING AND CARRIER RECOVERY", имеющей номер дела в досье поверенного 080790P1, поданной 13 мая 2008 года, назначенной правопреемнику этой заявки и явно заключенной в данный документ посредством ссылки. Настоящая заявка на патент также связана с находящейся одновременно на рассмотрении заявкой на патент США номер 12/038,724, озаглавленной "COHERENT SINGLE ANTENNA INTERFERENCE CANCELLATION FOR GSM/GPRS/EDGE", имеющей номер дела в досье поверенного 071339/071341, поданной 27 февраля 2008 года, назначенной правопреемнику этой заявки и явно заключенной в данный документе посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в общем относится к беспроводной связи, а в частности относится к подавлению помех при нестационарных условиях.
УРОВЕНЬ ТЕХНИКИ
Во многих системах связи с применением GSM, GPRS, EDGE и т.п. возможность приемника надлежащим образом декодировать принимаемый сигнал зависит от возможности приемника точно оценивать время и частоту символов. По мере того как беспроводная связь становится все более распространенной, тем не менее увеличение количества помех может оказывать отрицательное влияние на возможность приемника делать это.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному аспекту настоящей технологии оптимальное время и частоту (посредством которых циклически сдвигают принимаемые выборки) совместно получают в системе беспроводной связи посредством параметризации подпространства в возможные гипотезы по времени и частоте и поиска среди них. Совместная оценка максимального правдоподобия частоты и времени может выполняться последовательно или параллельно.
Согласно определенным аспектам настоящей технологии фильтр подавления помех настраивается на различные параметры, и затем отбираются оптимальные пары (времени и частоты) посредством минимизации ошибки прогнозирования с использованием известной последовательности (мидамбулы или квазимидамбулы, к примеру, с добавлением данных). Алгоритм повышает качество принимаемого сигнала при сильных помехах, при которых некогерентная оценка могла бы значительно ухудшать.
Согласно одному аспекту настоящей технологии способ для временной и частотной синхронизации в беспроводной системе содержит этапы приема пакета символов, выбора поднабора пакета символов, итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и вычисления, для каждого сдвига по времени, первого показателя производительности, соответствующего отрегулированному поднабору. Способ дополнительно содержит этапы определения одного из множества сдвигов по времени как предпочтительного сдвига по времени на основе его первого показателя производительности, итеративного циклического сдвига поднабора пакета символов посредством множества сдвигов по частоте и вычисления, для каждого сдвига по частоте, второго показателя производительности, соответствующего циклически сдвинутому поднабору, и определения одного из множества сдвигов по частоте как предпочтительного сдвига по частоте на основе его второго показателя производительности.
Согласно другому аспекту настоящей технологии способ для временной и частотной синхронизации в беспроводной системе содержит этапы приема пакета символов, выбора поднабора пакета символов, итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте, вычисления, для каждой комбинации сдвигов по времени и частоте, показателя производительности, соответствующего отрегулированному поднабору, и определения одной из комбинации сдвигов по времени и частоте как предпочтительной комбинации на основе ее показателя производительности.
Согласно другому аспекту настоящей технологии беспроводное устройство содержит приемник, выполненный, чтобы принимать пакет символов, и процессор. Процессор выполнен, чтобы выбирать поднабор пакета символов, итеративно регулировать поднабор пакета символов посредством множества сдвигов по времени и вычислять, для каждого сдвига по времени, первый показатель производительности, соответствующий отрегулированному поднабору. Процессор дополнительно выполнен, чтобы определять один из множества сдвигов по времени как предпочтительный сдвиг по времени на основе его первого показателя производительности, итеративно циклически сдвигать поднабор пакета символов посредством множества сдвигов по частоте и вычислять, для каждого сдвига по частоте, второй показатель производительности, соответствующий циклически сдвинутому поднабору, и определять один из множества сдвигов по частоте как предпочтительный сдвиг по частоте на основе его второго показателя производительности.
Согласно другому аспекту настоящей технологии беспроводное устройство содержит приемник, выполненный, чтобы принимать пакет символов, и процессор. Процессор выполнен, чтобы принимать пакет символов, выбирать поднабор пакета символов, итеративно регулировать поднабор пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте, вычислять, для каждой комбинации сдвигов по времени и частоте, показатель производительности, соответствующий отрегулированному поднабору, и определять одну из комбинации сдвигов по времени и частоте как предпочтительную комбинацию на основе ее показателя производительности.
Согласно другому аспекту настоящей технологии беспроводное устройство содержит средство для приема пакета символов, средство для выбора поднабора пакета символов, средство для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и для вычисления, для каждого сдвига по времени, первого показателя производительности, соответствующего отрегулированному поднабору, средство для определения одного из множества сдвигов по времени как предпочтительного сдвига по времени на основе его первого показателя производительности, средство для итеративного циклического сдвига поднабора пакета символов посредством множества сдвигов по частоте и вычисления, для каждого сдвига по частоте, второго показателя производительности, соответствующего циклически сдвинутому поднабору, и средство для определения одного из множества сдвигов по частоте как предпочтительного сдвига по частоте на основе его второго показателя производительности.
Согласно другому аспекту настоящей технологии беспроводное устройство содержит средство для приема пакета символов, средство для выбора поднабора пакета символов, средство для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте, средство для вычисления, для каждой комбинации сдвигов по времени и частоте, показателя производительности, соответствующего отрегулированному поднабору, и средство для определения одной из комбинации сдвигов по времени и частоте как предпочтительной комбинации на основе ее показателя производительности.
Согласно другому аспекту настоящей технологии компьютерный программный продукт для использования в системе беспроводной связи содержит компьютерно-читаемый носитель, имеющий набор сохраненных в нем инструкций, набор инструкций исполняется посредством одного или более процессоров, и набор инструкций содержит инструкции для приема пакета символов, инструкции для выбора поднабора пакета символов, инструкции для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и для вычисления, для каждого сдвига по времени, первого показателя производительности, соответствующего отрегулированному поднабору, инструкции для определения одного из множества сдвигов по времени как предпочтительного сдвига по времени на основе его первого показателя производительности, инструкции для итеративного циклического сдвига поднабора пакета символов посредством множества сдвигов по частоте и для вычисления, для каждого сдвига по частоте, второго показателя производительности, соответствующего циклически сдвинутому поднабору, и инструкции для определения одного из множества сдвигов по частоте как предпочтительного сдвига по частоте на основе его второго показателя производительности.
Согласно другому аспекту настоящей технологии компьютерный программный продукт для использования в системе беспроводной связи содержит компьютерно-читаемый носитель, имеющий набор сохраненных в нем инструкций, набор инструкций исполняется посредством одного или более процессоров, и набор инструкций содержит инструкции для приема пакета символов, инструкции для выбора поднабора пакета символов, инструкции для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте, инструкции для вычисления, для каждой комбинации сдвигов по времени и частоте, показателя производительности, соответствующего отрегулированному поднабору, и инструкции для определения одной из комбинации сдвигов по времени и частоте как предпочтительной комбинации на основе ее показателя производительности.
Следует понимать, что другие конфигурации настоящей технологии станут очевидными для специалистов в данной области техники из последующего подробного описания, в котором различные конфигурации настоящей технологии показаны и описаны в качестве иллюстрации. Также следует учитывать, что настоящая технология допускает другие и отличающиеся конфигурации и ее определенные детали допускают модификацию в различных других отношениях без отступления от объема настоящей технологии. Следовательно, чертежи и подробное описание должны рассматриваться как иллюстративные, а не ограничивающие по своему характеру.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует примерные форматы кадра и пакета в GSM в соответствии с одним аспектом настоящей технологии;
фиг.2 является блок-схемой последовательности операций, иллюстрирующей способ для подавления помех в соответствии с одним аспектом настоящей технологии;
фиг.3 является блок-схемой последовательности операций, иллюстрирующей способ для подавления помех в соответствии с одним аспектом настоящей технологии;
фиг.4 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии;
фиг.5 иллюстрирует поднабор символов, включающий в себя первый символ мидамбулы, который приемник выбирает в соответствии с одним аспектом настоящей технологии;
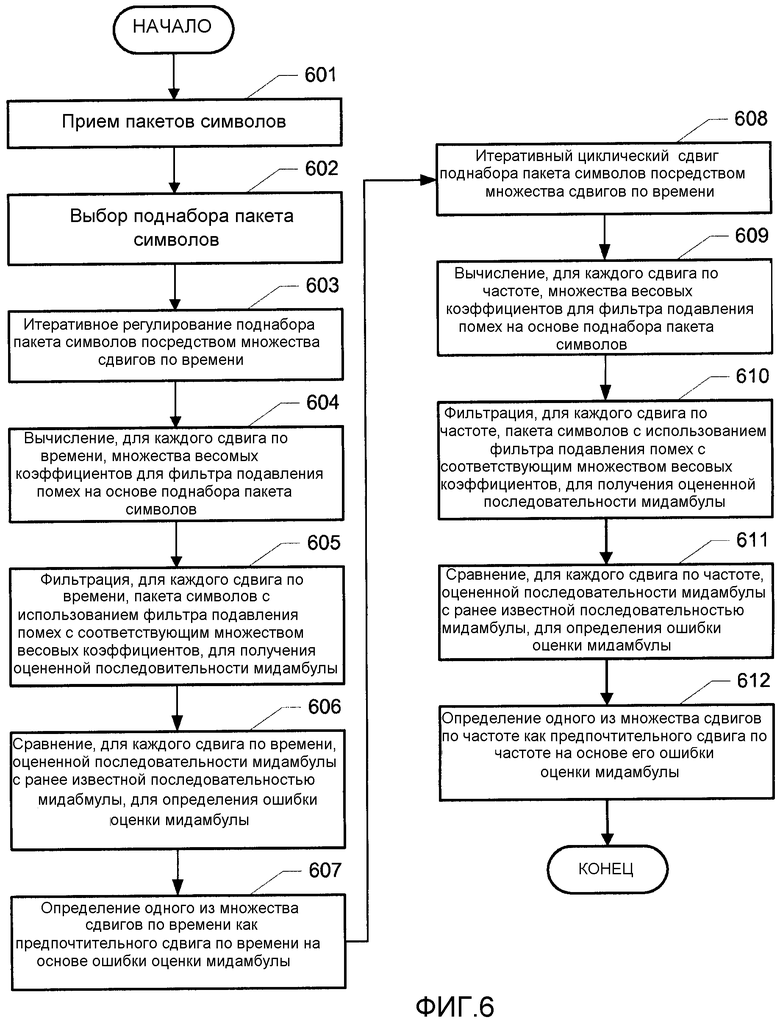
фиг.6 иллюстрирует способ для подавления помех в соответствии с одним аспектом настоящей технологии;
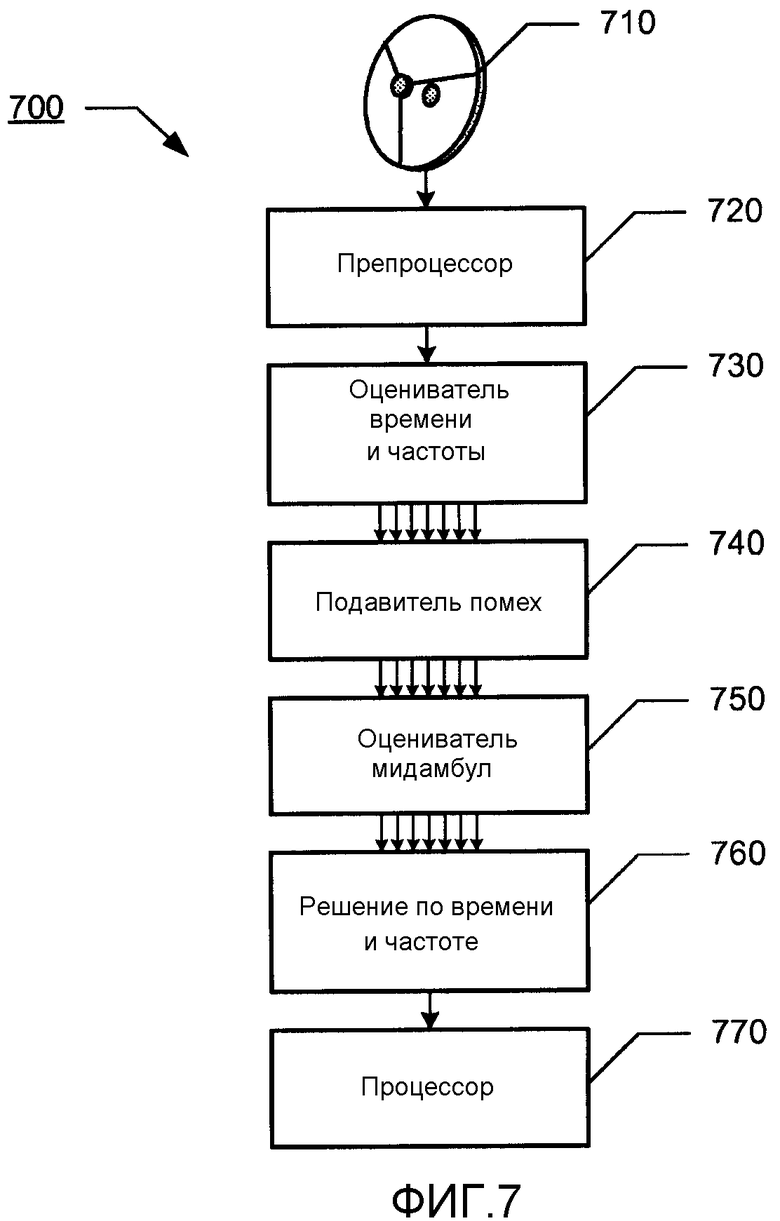
фиг.7 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии;
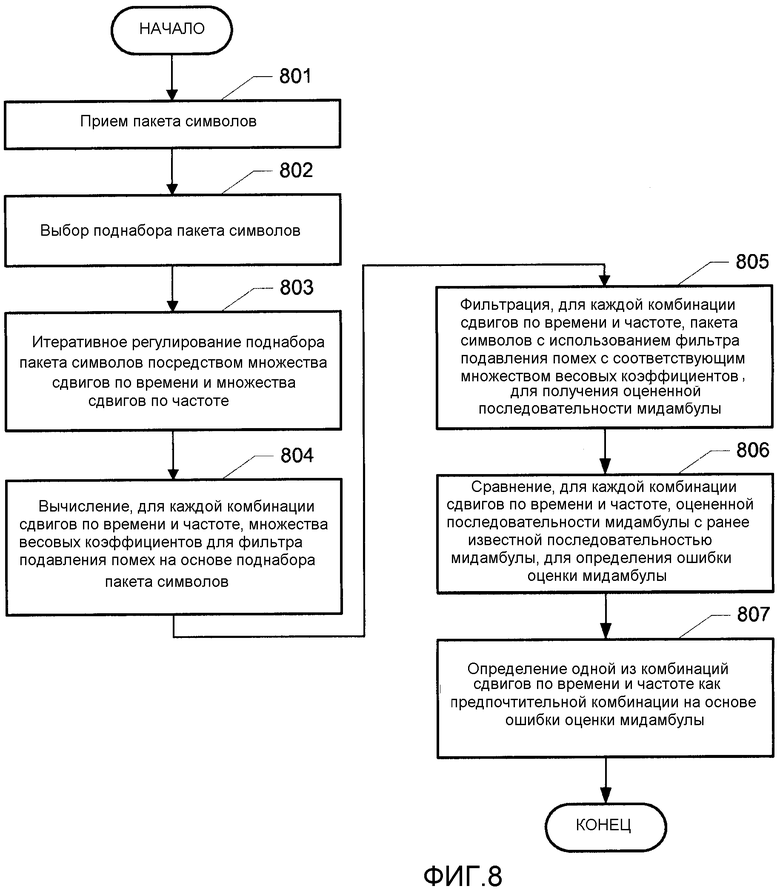
фиг.8 иллюстрирует способ для подавления помех в соответствии с одним аспектом настоящей технологии;
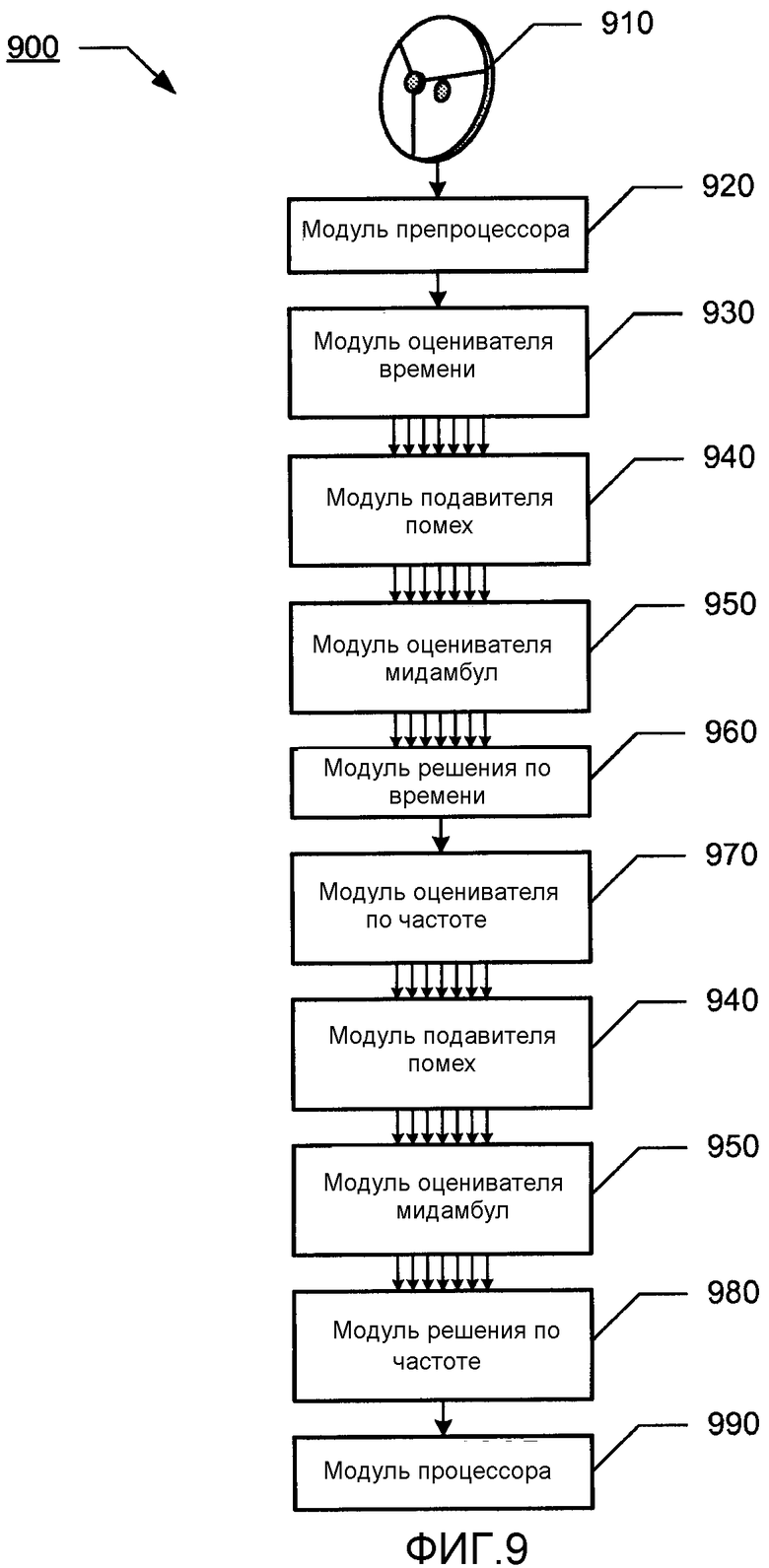
фиг.9 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии;
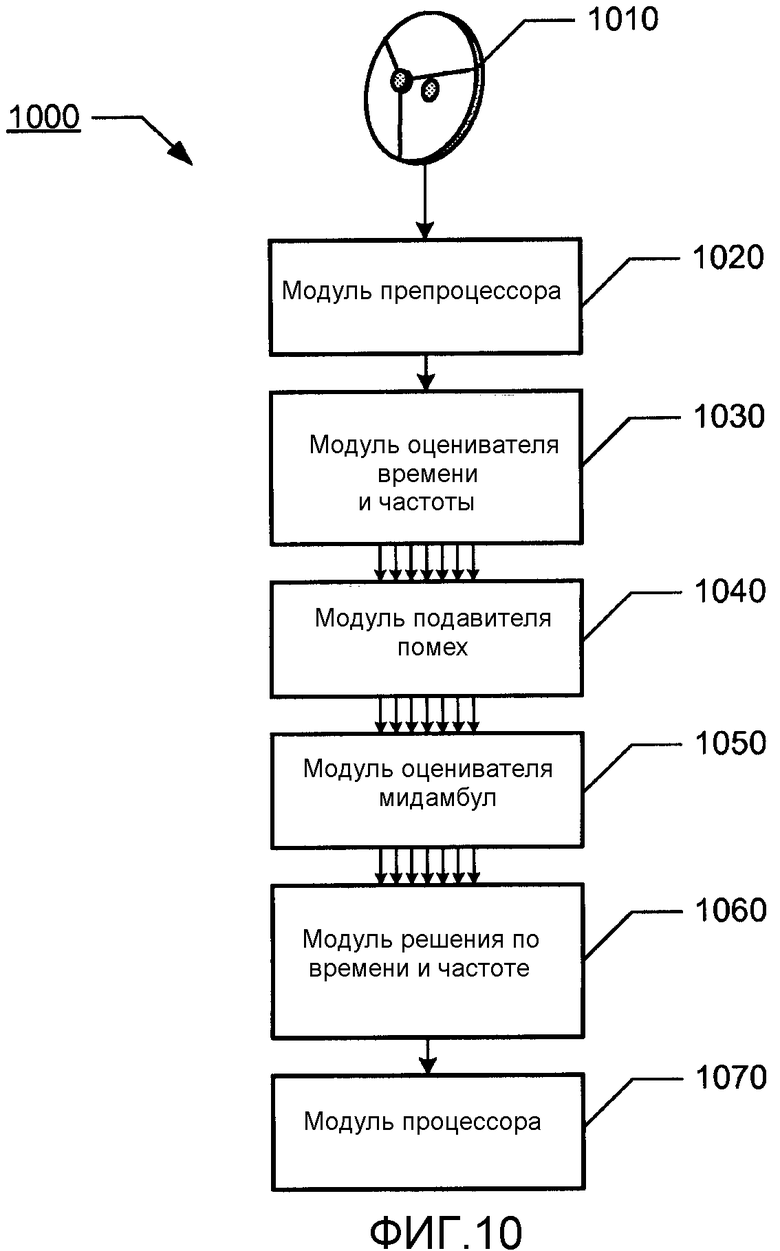
фиг.10 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии; и
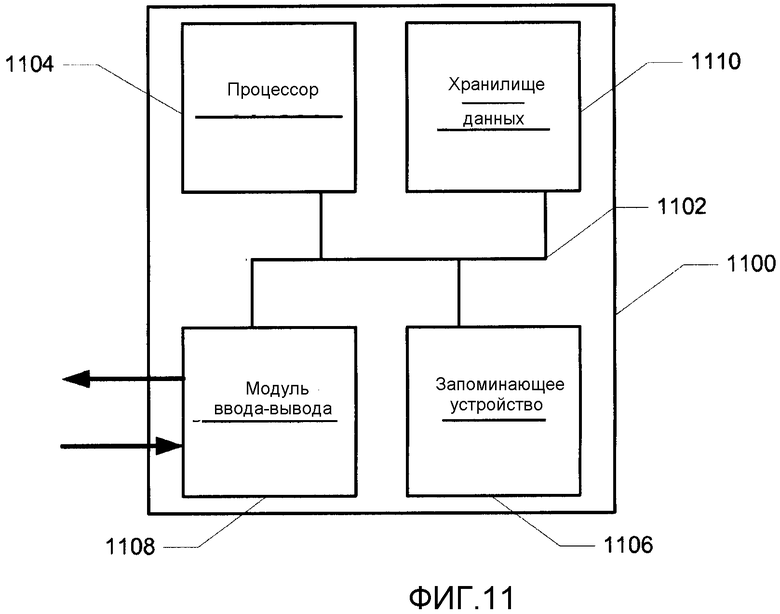
фиг.11 является блок-схемой, иллюстрирующей компьютерную систему, с которой могут быть реализованы определенные аспекты настоящей технологии.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг.1 показывает примерные форматы кадра и пакета в GSM. Временная шкала для передачи по нисходящей линии связи разделяется на мультикадры. Для каналов трафика, используемых для того, чтобы отправлять для конкретного пользователя данные, каждый мультикадр, такой как примерный мультикадр 101, включает в себя 26 TDMA-кадров, которые помечены как TDMA-кадры 0-25. Каналы трафика отправляются в TDMA-кадрах 0-11 и TDMA-кадрах 13-24 каждого мультикадра, как идентифицировано посредством буквы "T" на фиг.1. Канал управления, идентифицированный посредством буквы "C", отправляется в TDMA-кадре 12. Данные не отправляются в бездействующем TDMA-кадре 25 (идентифицированном посредством буквы "I"), который используется посредством беспроводных устройств для того, чтобы проводить измерения на предмет соседних базовых станций.
Каждый TDMA-кадр, такой как примерный TDMA-кадр 102, дополнительно делится на восемь временных слотов, которые помечаются как временные слоты 0-7. Каждому активному беспроводному устройству/пользователю назначается один индекс временного слота на протяжение вызова. Данные для конкретного пользователя для каждого беспроводного устройства отправляются во временном слоте, назначаемом этому беспроводному устройству, и в TDMA-кадрах, используемых для каналов трафика.
Передача в каждом временном слоте называется "пакетом" в GSM. Каждый пакет, такой как примерный пакет 103, включает в себя два "хвостовых" поля, два поля данных, поле обучающей последовательности (или мидамбулы) и защитный период (GP). Число битов в каждом поле показано в круглых скобках. GSM задает восемь различных обучающих последовательностей, которые могут отправляться в поле обучающей последовательности. Каждая обучающая последовательность, такая как мидамбула 104, вмещает в себя 26 битов и задается так, что первые пять битов повторяются и вторые пять битов также повторяются. Каждая обучающая последовательность также задается так, что корреляция этой последовательности с 16-битовой усеченной версией этой последовательности равна (a) шестнадцати для нулевого сдвига по времени, (b) нулю для сдвигов по времени в ±1, ±2, ±3, ±4 и ±5 и (c) нулевому или ненулевому значению для всех других сдвигов по времени.
Один подход к обнаружению мидамбулы в пакете символов последовательно сравнивает гипотезы, касающиеся позиции мидамбулы, чтобы определять то, какая гипотеза предоставляет наивысшую энергию корреляции между известной последовательностью мидамбулы и гипотетической позицией в пакете символов. Этот способ является очень чувствительным к помехам от многолучевых распространений одной и той же последовательности мидамбулы, что может приводить к влиянию неточных гипотез на энергию корреляции посредством ее задержанных по времени копий.
Некогерентная частотная и временная оценка подвержена ухудшению производительности при присутствии сильных помех. Согласно одному аспекту настоящей технологии посредством полукогерентной оценки оптимального времени и частоты производительность при присутствии помех может значительно повышаться.
Согласно одному аспекту настоящей технологии оптимальное время и частота (посредством которых циклически сдвигают принимаемые выборки) совместно получаются посредством параметризации подпространства в возможные гипотезы и поиска среди них. Совместная оценка максимального правдоподобия частоты и времени дополнительно может упрощаться до последовательного поиска, чтобы предоставлять оптимальную производительность.
Согласно одному аспекту настоящей технологии фильтр подавления помех настраивается на различные параметры, и затем отбираются оптимальные пары (времени и частоты) посредством минимизации ошибки прогнозирования с использованием известной последовательности (мидамбулы или квазимидамбулы, к примеру, с добавлением данных). Алгоритм повышает качество принимаемого сигнала при сильных помехах, при которых некогерентная оценка могла бы значительно ухудшать.
Например, с учетом набора пространственных и временных выборок во время k:
где s k - это сигнал мидамбулы/квазимидамбулы во время k, s k - это вектор (υ+1)×1 мидамбул/квазимидамбул и x k - это принимаемый вектор M×1 мидамбул/квазимидамбул, набор пространственно-временных выборок может быть задан следующим образом:
где X k - это вектор M×(L+1)×1 пространственно-временных выборок с пространственной длиной M и временной длиной L+1. Соответственно, пространственно-временная структурированная матрица может быть составлена так, что:

где [X] - это матрица M(L+1)×p-υ и p - это длина мидамбулы или квазимидамбулы (с добавлением данных).
Соответственно, с учетом [X] и  подавляющий фильтр WSAIC может вычисляться согласно одному аспекту настоящего раскрытия сущности посредством оценки опорной последовательности символов на входе канала:
подавляющий фильтр WSAIC может вычисляться согласно одному аспекту настоящего раскрытия сущности посредством оценки опорной последовательности символов на входе канала:

где W=(υ+1)×M(L+1) и 
Вышеприведенное уравнение может быть перезаписано следующим образом:

или, более конкретно, следующим образом:

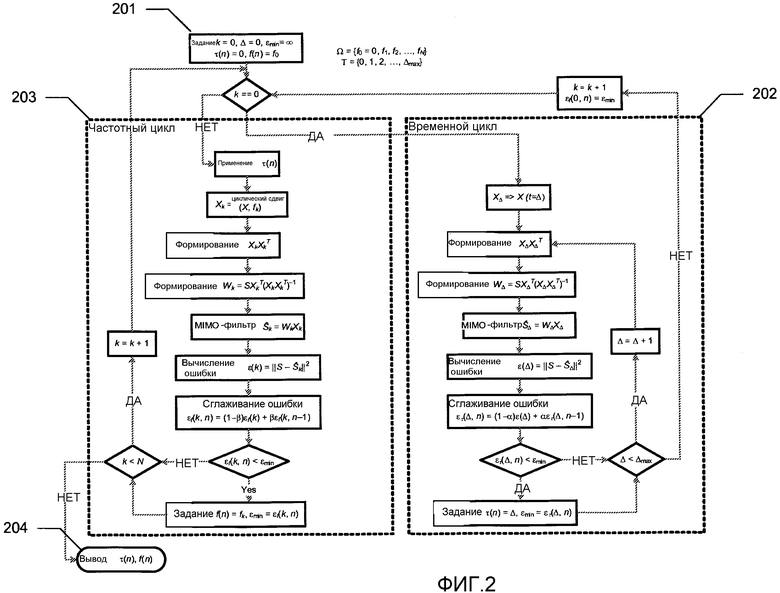
Чтобы оценивать оптимальную пару параметров времени и частоты, фильтр подавления помех может быть последовательно настроен на каждую из множества гипотез по времени, и выбирается гипотеза, соответствующая наименьшей ошибке прогнозирования (с использованием любой известной последовательности, такой как мидамбула или квазимидамбула с добавлением данных). Затем фильтр последовательно настраивается на каждую из множества гипотез по частоте, чтобы определять то, какая гипотеза по частоте соответствует наименьшей ошибке прогнозирования. Этот последовательный подход иллюстрируется в соответствии с одним аспектом настоящего раскрытия сущности на фиг.2. Первоначально способ начинается посредством инициализации определенного числа переменных на этапе 201, в том числе k (номер гипотезы по частоте), Δ (номер гипотезы по времени), ε min (наименьшая измеренная ошибка), τ(n) (номер оптимальной гипотезы по времени) и f(n) (номер оптимальной гипотезы по частоте). Способ переходит к временному циклу 202 (поскольку k инициализировано в нулевое значение). Во временном цикле набор пространственно-временных выборок выбирается согласно номеру Δ гипотезы по времени. Весовые коэффициенты фильтрации для фильтра W Δ вычисляются на основе гипотезы по времени, как подробнее изложено выше, и к символам применяется фильтр, чтобы оценивать мидамбулу. Ошибка ε(Δ) в оцененной мидамбуле определяется на основе ранее известных значений для мидамбулы ŜΔ. Ошибка сглаживается и сравнивается с ε min, наименьшей вычисленной ошибкой к данному моменту. Поскольку ε min первоначально задается равной ∞, первая итерация должна обязательно заключать в себе переопределение ε min к первому вычисленному значению ошибки. Соответственно, τ(n), уже вычисленная оптимальная гипотеза по времени, должна задаваться равной Δ. Затем до тех пор, пока Δ меньше Δmax (общего числа гипотез в параметризованном пространстве), гипотеза Δ индексируется на единицу, и временной цикл 202 повторяется. После того как временной цикл 202 итеративно вычисляет ошибки для каждой гипотезы Δ по времени, должна выбираться оптимальная гипотеза τ(n), и способ переходит к частотному циклу 203. Методом, аналогичным временному циклу 202, частотный цикл 203 итеративно вычисляет ошибки оценки мидамбулы для каждой гипотезы по частоте (при оптимальной временной задержке) и определяет оптимальную гипотезу по частоте. Таким образом, оптимальная пара времени/частоты последовательно определяется из параметризованного частотно-временного подпространства и используется в обработке символов, чтобы минимизировать ошибки, возникающие при помехах.
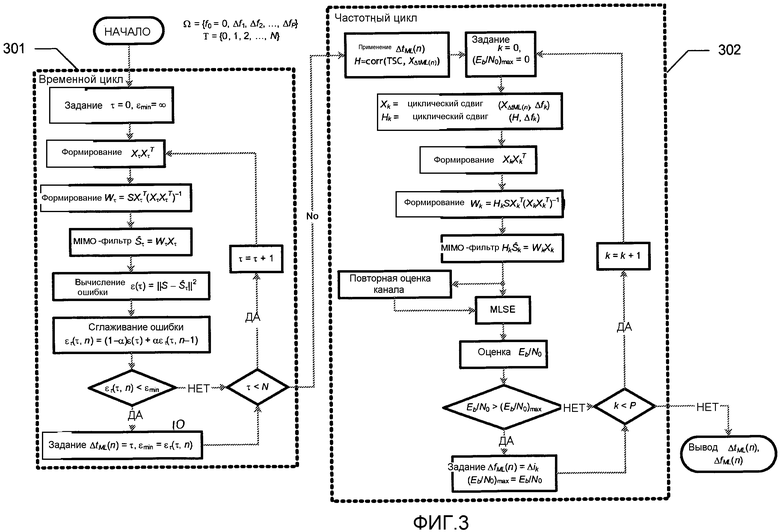
Согласно одному аспекту настоящего раскрытия сущности один недостаток использования этого алгоритма для частотной синхронизации заключается в том, что обучающая последовательность может быть слишком короткой, чтобы надежно оценивать небольшие сдвиги по частоте (к примеру, порядка нескольких сотен Гц), поскольку искривление в мидамбуле является по существу плоским. Следовательно, имеется потребность в фильтре сглаживания ошибок, который делает реализацию более сложной в области, где сдвиг по частоте между источником помех и полезным сигналом может изменяться от пакета к пакету. Соответственно, чтобы получать лучшие и более точные оценки на попакетной основе без необходимости сглаживать оценки ошибок оценки мидамбулы, отношение "сигнал-шум" может использоваться для всего пакета вместо ошибки оценки мидамбулы в соответствии с одним аспектом настоящего раскрытия сущности. Чтобы получать это отношение "сигнал-шум", пакет выравнивается (пост-MLSE), и отношение "сигнал-шум" определяется с использованием жестких решений. Этот подход иллюстрируется в соответствии с одним аспектом настоящего раскрытия сущности на фиг.3. Как можно видеть при обращении к фиг.3, временной цикл включает в себя оценку отношения "сигнал-шум" (Eb/N0).
Аналогичным проиллюстрированному в примерной фиг.2 образом, способ, проиллюстрированный на фиг.3, включает в себя временной цикл 301 и частотный цикл 302. Во временном цикле набор пространственно-временных выборок выбирается согласно номеру τ гипотезы по времени. Весовые коэффициенты фильтрации для фильтра W τ вычисляются на основе гипотезы по времени, как подробнее изложено выше, и фильтр применяется к символам, чтобы оценивать мидамбулу Ŝ τ. Ошибка ε τ в оцененной мидамбуле определяется на основе ранее известных значений для мидамбулы S. Ошибка сглаживается и сравнивается с ε min, наименьшей вычисленной ошибкой к данному моменту. Поскольку ε min первоначально задается равной ∞, первая итерация должна обязательно заключать в себе переопределение ε min к первому вычисленному значению ошибки. Соответственно, Δt ML(n), уже вычисленная оптимальная гипотеза по времени, должна задаваться равной τ. Затем до тех пор, пока τ меньше N (общего числа гипотез в параметризованном пространстве), гипотеза τ индексируется на единицу, и временной цикл 301 повторяется. После того как временной цикл 301 итеративно вычисляет ошибки для каждой гипотезы τ по времени, должна выбираться оптимальная гипотеза Δt ML(n), и способ переходит к частотному циклу 302. Частотный цикл 302 итеративно вычисляет отношение "сигнал-шум" для каждой гипотезы по частоте (при оптимальной временной задержке) и определяет оптимальную гипотезу по частоте. Таким образом, оптимальная пара времени/частоты последовательно определяется из параметризованного частотно-временного подпространства и используется в обработке символов, чтобы минимизировать ошибки, возникающие при помехах.
Согласно одному аспекту отношение Eb/E0 "сигнал-шум", определенное в частотном цикле 302, основано на жестких решениях. В этом отношении SNR может быть равным  , где Ŝ - это матрица Теплица оцененных символов после выравнивания всего пакета, который также включает в себя известную обучающую последовательность S.
, где Ŝ - это матрица Теплица оцененных символов после выравнивания всего пакета, который также включает в себя известную обучающую последовательность S.
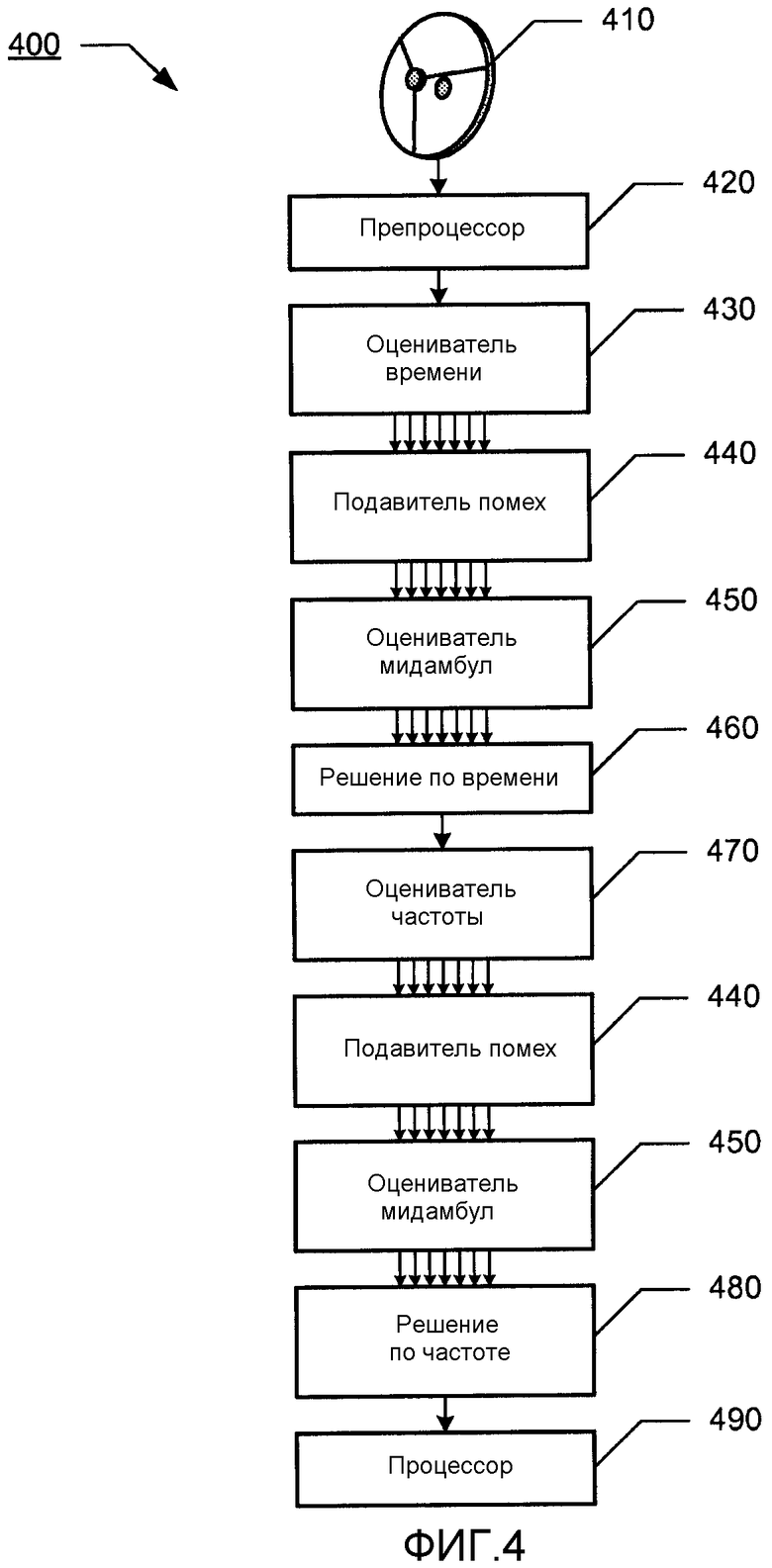
Фиг.4 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии. Приемник 400 включает в себя антенну 410, выполненную, чтобы принимать беспроводной сигнал. Хотя приемник 400 может использоваться в различных системах связи, для понятности приемник 400 конкретно описан в данном документе относительно GSM-системы. Принимаемый сигнал предоставляется в препроцессор 420, который демодулирует сигнал, чтобы формировать принимаемые выборки. Препроцессор 420 может включать в себя циклический сдвигатель от-GMSK-к-BPSK, который выполняет циклический сдвиг фаз для принимаемых выборок. Оцениватель 430 времени принимает выборки от препроцессора 420 и формирует множество гипотез по времени, касающихся того, где обучающая последовательность символов (т.е. мидамбула) начинается в пакете данных. Подавитель 440 помех итеративно выполняет подавление одноантенных помех для символов для каждой гипотезы по времени, вычисляя различные весовые коэффициенты фильтрации для каждой гипотезы по времени, и оцениватель 450 мидамбул формирует ошибку оценки мидамбулы для каждой гипотезы, как подробнее описано выше. Схема 460 решения по времени сравнивает ошибки оценки мидамбулы для каждой гипотезы и выбирает гипотезу с наименьшей ошибкой оценки мидамбулы. Выбор гипотезы посредством схемы 460 решения по времени представляет позицию в пакете символов, где, как оценено, начинается мидамбула. Оцениватель 470 частоты принимает выборки от схемы 460 решения по времени и формирует множество гипотез по частоте, касающихся частоты, на которой передаются символы. Подавитель 440 помех итеративно выполняет подавление одноантенных помех для символов для каждой гипотезы по частоте, вычисляя различные весовые коэффициенты фильтрации для каждой гипотезы по частоте, и оцениватель 450 мидамбул формирует ошибку оценки мидамбулы для каждой гипотезы, как подробнее описано выше. Схема 480 решения по частоте сравнивает ошибки оценки мидамбулы для каждой гипотезы и выбирает гипотезу с наименьшей ошибкой оценки мидамбулы. Выбор гипотезы посредством схемы 480 решения по частоте представляет оптимальную частоту для приема пакета символов. Сигнал затем предоставляется в процессор 490 данных, который обрабатывает принимаемые символы на основе выбранных временных и частотных гипотез и выводит данные, соответствующие принимаемым символам.
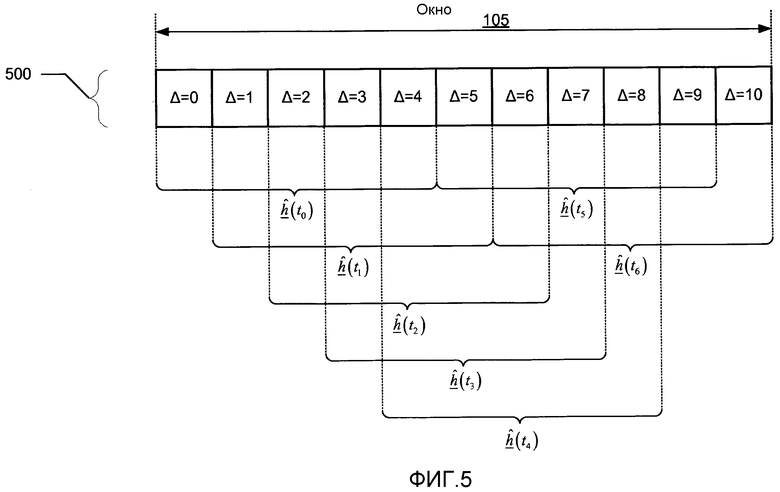
Согласно одному аспекту настоящего раскрытия сущности оцениватель времени может формировать множество гипотез по времени посредством открытия "окна" вокруг оцененного начала последовательности мидамбулы. Позиция первого символа последовательности мидамбулы может быть оценена для данного пакета на основе известной структуры каждого пакета. Например, как проиллюстрировано на фиг.1, начало мидамбулы 104 в пакете 103 начинается в 62-м бите пакета. На основе этой известной структуры оцениватель 430 времени выбирает окно 105 битов, представляющих последовательность гипотез, касающихся того, где первый символ мидамбулы может находиться. Примерное окно 105 подробнее иллюстрируется на фиг.5.
Как можно видеть при обращении к фиг.5, примерное окно 105 содержит 11 символов, помеченных от Δ=0 до Δ=10. Каждое значение Δ представляет позицию символа в окне. В отношении позиции символа во всем пакете тем не менее значение Δ сдвигается на значение сдвига (к примеру, Δ=5 может быть сдвинуто на 61, чтобы представлять позицию этого символа во всем пакете). Для первых семи символов в окне 105 оцениватель 430 времени формирует оценку канала из последовательности из пяти смежных символов (представляющих формат канала GSM с пятью отводами). Например, символ Δ=0 соответствует оценке ĥ (t 0) канала, символ Δ=1 соответствует оценке ĥ (t 1) канала, и т.д. Каждая из этих оценок канала затем обрабатывается посредством подавителя 440 помех и оценивателя 450 мидамбул, чтобы определять оцененные символы мидамбулы, соответствующие ей, для того чтобы определять для нее ошибку оценки мидамбулы.
Хотя в настоящем примерном аспекте окно 105 проиллюстрировано как состоящее точно из 11 символов, объем настоящего изобретения не ограничен такой компоновкой. Наоборот, как должно быть очевидным для специалистов в данной области техники, может выбираться любой размер окна (вплоть до размера всего пакета данных). Например, в соответствии с одним аспектом настоящей технологии размер окна поиска может выбираться так, чтобы в два раза превышать размер ожидаемой минимальной задержки распространения. Альтернативно, размер окна поиска может параметризоваться на основе любого другого показателя, известного специалистам в данной области техники.
Согласно одному аспекту оценка ĥ канала может быть сформирована посредством оценивателя 430 времени посредством корреляции принимаемых выборок (соответствующих гипотетической задержке) с опорными выборками (т.е. известной последовательностью мидамбулы) для каждой гипотезы. На основе корреляции R ys(Δ) между принимаемым сигналом y и последовательностью s мидамбулы для гипотетической задержки Δ оценка канала может вычисляться следующим образом:


Чтобы тестировать гипотезу, соответствующую каждой оценке канала, подавитель 440 помех выполняет SAIC для каждого оцененного канала. SAIC - это способ, которым избыточно дискретизированное и/или действительное/мнимое разложение сигнала используется для того, чтобы предоставлять виртуальным антеннам отдельные последовательности выборок, так чтобы весовые коэффициенты могли применяться к виртуальным антеннам, чтобы формировать диаграмму направленности антенны в направлении требуемого передатчика и нуль в диаграмме направленности антенны в направлении нежелательного источника помех. В общем, SAIC может достигаться с помощью одной или множества фактических антенн в приемнике посредством использования пространственно-временной обработки, где "пространство" может фактически достигаться с помощью синфазных и квадратурных компонентов, а "время" может достигаться с использованием поздних и ранних выборок.
Например, с учетом набора пространственных и временных выборок во время k:
где s k - это сигнал мидамбулы/квазимидамбулы во время k, s k - это вектор (υ+4)×1 мидамбул/квазимидамбул и x k - это принимаемый вектор M×1 мидамбул/квазимидамбул, набор пространственно-временных выборок может быть задан следующим образом:
где X k - это вектор M×(L+1)×1 пространственно-временных выборок с пространственной длиной M и временной длиной L+1. Соответственно, пространственно-временная структурированная матрица может быть составлена так, что:
где [X] - это матрица M(L+1)×p-υ и p - это длина мидамбулы или квазимидамбулы (с добавлением данных).
Соответственно, с учетом [X] и подавляющий фильтр W
SAIC может вычисляться согласно одному аспекту настоящего раскрытия сущности посредством оценки опорной последовательности символов на входе канала:

Вышеприведенное уравнение может быть перезаписано следующим образом:

или, более конкретно, следующим образом:

Выходной сигнал подавителя 440 помех имеет форму Ŝ, где Ŝ представляет оценку последовательности мидамбулы. Разность между оцененными и известными последовательностями мидамбулы определяется согласно уравнению 7 ниже:

чтобы получать ошибку e m (t i ) оценки мидамбулы для каждого времени t i. Каждое время t i равно гипотетической позиции Δi плюс сдвиг T s от начала пакета:

После того как ошибка e m (t i ) оценки мидамбулы для каждого времени определяется, блок 460 решения по времени определяет то, какая гипотеза соответствует наименьшей ошибке оценки, и другие гипотетические временные значения отбрасываются.
Согласно одному аспекту настоящего раскрытия сущности вышеприведенный способ для подавления помех обладает рядом преимуществ по сравнению со способом с применением формирования диаграммы направленности на выходе канала. Например, как можно видеть в отношении уравнения 4, весовые коэффициенты фильтра подавления помех вычисляются посредством минимизации функции затрат:

Соответственно, весовые коэффициенты подавляющего фильтра (уравнения 6) имеют размерность υ×M(L+1), а отфильтрованный выходной сигнал имеет размерность υ×(p-υ). Соответственно, размер весовых коэффициентов фильтрации растет линейно с числом антенн (действительных или виртуальных), и размер матрицы отфильтрованных выходных выборок остается постоянным, даже если число антенн (или виртуальных антенн) растет. Это предлагает значительное улучшение в смысле вычислительной простоты и требований по объему хранилища для настройки вывода канала, при которых весовые коэффициенты фильтра подавления помех вычисляются посредством минимизации функции затрат:

что приводит к весовым коэффициентам подавляющего фильтра с размерностью M×M(L+1) и отфильтрованному выходному сигналу с размерностью M×(p-υ) (т.е. где число весовых коэффициентов фильтрации масштабируется геометрически с числом антенн и где размер матрицы отфильтрованных выходных выборок увеличивается линейно с числом антенн).
Такая настройка вывода канала дополнительно заключает в себе больший объем хранилища и оконечное выравнивание ISI с использованием нелинейных выравнивателей (таких как MLSE, где число входных потоков должно быть задано равным M). В настройке ввода канала число входных потоков для оконечного выравнивания ISI составляет только υ, и число обратных подстановок при вычислении весовых коэффициентов фильтрации сокращается (не пропорционально числу антенн, как в настройке вывода канала). Несмотря на вычислительную простоту, тем не менее производительность системы, по меньшей мере, не хуже, если не лучше, чем в настройке вывода канала. В этом отношении настройка ввода канала предоставляет хорошую устойчивость к ошибкам оценки канала, которая имеет тенденцию оказывать доминирующее влияние на производительность приемника GERAN, когда помехи присутствуют.
Согласно одному аспекту настоящего раскрытия сущности процессор 490 данных содержит формирователь мягкого вывода, который принимает сигнал от блока 480 решения по частоте и формирует мягкие решения, которые указывают достоверность в обнаруженных битах. Формирователь мягкого вывода может реализовывать алгоритм Оно, как известно специалистам в данной области техники. Процессор 490 данных дополнительно может содержать модуль деперемежения, который выполняет деперемежение мягких решений и передает мягкие решения в декодер Витерби, который декодирует деперемеженные мягкие решения и выводит декодированные данные.
Фиг.6 иллюстрирует способ для подавления помех в соответствии с одним аспектом настоящей технологии. Способ начинается на этапе 601, на котором принимается пакет символов. На этапе 602 выбирается поднабор пакета символов. Согласно одному аспекту настоящего раскрытия сущности поднабор пакета символов включает в себя первый символ мидамбулы. На этапе 603 поднабор, выбранный на этапе 602, итеративно регулируется посредством множества сдвигов по времени. На этапе 604 вычисляется множество весовых коэффициентов для фильтра помех для каждого сдвига по времени на основе пакета символов. На этапе 605 фильтруется пакет символов, для каждого сдвига по времени, с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов, чтобы определять оцененную последовательность мидамбулы. На этапе 606 оцененная последовательность мидамбул для каждого сдвига по времени сравнивается с ранее известной последовательностью мидамбулы, чтобы определять ошибку оценки мидамбулы для этого сдвига по времени. Один из множества сдвигов по времени определяется на этапе 607 как предпочтительный сдвиг по времени на основе его ошибки оценки мидамбулы. Согласно одному аспекту настоящего раскрытия сущности предпочтительным сдвигом по времени мидамбулы является сдвиг по времени, соответствующий наименьшей ошибке оценки мидамбулы. На этапе 608 поднабор пакета символов итеративно циклически сдвигается посредством множества сдвигов по частоте. На этапе 609 вычисляется множество весовых коэффициентов для фильтра помех для каждого сдвига по частоте на основе пакета символов. На этапе 610 фильтруется пакет символов, для каждого сдвига по частоте, с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов, чтобы определять оцененную последовательность мидамбулы. На этапе 611 оцененная последовательность мидамбулы для каждого сдвига по частоте сравнивается с ранее известной последовательностью мидамбулы, чтобы определять ошибку оценки мидамбулы для этого сдвига по частоте. Один из множества сдвигов по частоте определяется на этапе 612 как предпочтительный сдвиг по частоте на основе его ошибки оценки мидамбулы.
Согласно одному аспекту настоящего раскрытия сущности может быть использован параллельный подход к обнаружению оптимальной пары гипотез по времени/по частоте с соответствующим увеличением вычислительной сложности по сравнению с последовательным подходом (к примеру, если имеется 5 гипотез по частоте и 7 гипотез по времени, последовательный подход может заключать в себе определение ошибки прогнозирования 12 раз, тогда как параллельный подход будет заключать в себе определение ошибки прогнозирования 35 раз). Однако параллельный подход может предоставлять даже более точную оценку времени и частоты для повышенной производительности.
Фиг.7 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии. Приемник 700 включает в себя антенну 710, выполненную, чтобы принимать беспроводной сигнал. Принимаемый сигнал предоставляется в препроцессор 720, который демодулирует сигнал, чтобы формировать принимаемые выборки. Препроцессор 720 может включать в себя циклический сдвигатель от-GMSK-к-BPSK, который выполняет циклический сдвиг фаз для принимаемых выборок. Оцениватель 730 времени и частоты принимает выборки от препроцессора 720 и формирует множество гипотез по времени и частоте, касающихся того, где обучающая последовательность символов (т.е. мидамбула) начинается в пакете данных (время) и на какой частоте символы могут оптимально приниматься (частота). Подавитель 740 помех итеративно выполняет подавление одноантенных помех для символов для каждой пары гипотез по времени и частоте, вычисляя различные весовые коэффициенты фильтрации для каждой пары гипотез, и оцениватель 750 мидамбул формирует ошибку оценки мидамбулы для каждой пары гипотез, как подробнее описано выше. Схема 760 решения по времени и частоте сравнивает ошибки оценки мидамбулы для каждой пары гипотез и выбирает пару с наименьшей ошибкой оценки мидамбулы. Выбор пары гипотез посредством схемы 760 решения по времени и частоте представляет позицию в пакете символов, где, как оценено, мидамбула начинается, и оптимальную частоту для приема пакета символов. Сигнал затем предоставляется в процессор 770 данных, который обрабатывает принимаемые символы на основе выбранных гипотез по времени и частоте и выводит данные, соответствующие принимаемым символам.
Фиг.8 иллюстрирует способ для подавления помех в соответствии с одним аспектом настоящей технологии. Способ начинается на этапе 801, на котором принимается пакет символов. На этапе 802 выбирается поднабор пакета символов. Согласно одному аспекту настоящего раскрытия сущности поднабор пакета символов включает в себя первый символ мидамбулы. На этапе 803 поднабор, выбранный на этапе 802, итеративно регулируется посредством множества сдвигов по времени и частоте. На этапе 804 вычисляется множество весовых коэффициентов для фильтра помех для каждой пары сдвигов по времени и частоте на основе пакета символов. На этапе 805 пакет символов фильтруется, для каждой пары сдвигов, с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов, чтобы определять оцененную последовательность мидамбулы. На этапе 806 оцененная последовательность мидамбулы для каждой пары сдвигов сравнивается с ранее известной последовательностью мидамбулы, чтобы определять ошибку оценки мидамбулы для этого сдвига по времени. Одна из комбинации множества сдвигов по времени и частоте определяется на этапе 807 как предпочтительная комбинация на основе ее ошибки оценки мидамбулы. Согласно одному аспекту настоящего раскрытия сущности предпочтительной комбинацией является комбинация, соответствующая наименьшей ошибке оценки мидамбулы.
Фиг.9 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии. Приемник 900 включает в себя антенный модуль 910, выполненный, чтобы принимать беспроводной сигнал. Хотя приемник 900 может использоваться в различных системах связи, для понятности приемник 900 конкретно описан в данном документе относительно GSM-системы. Принимаемый сигнал предоставляется в модуль 920 препроцессора, который демодулирует сигнал, чтобы формировать принимаемые выборки. Модуль 920 препроцессора может включать в себя модуль циклического сдвигателя от-GMSK-к-BPSK, который выполняет циклический сдвиг фаз для принимаемых выборок. Модуль 930 оценивателя времени принимает выборки от модуля 920 препроцессора и формирует множество гипотез по времени, касающихся того, где обучающая последовательность символов (т.е. мидамбула) начинается в пакете данных. Модуль 940 подавителя помех итеративно выполняет подавление одноантенных помех для символов для каждой гипотезы по времени, вычисляя различные весовые коэффициенты фильтрации для каждой гипотезы по времени, и модуль 950 оценивателя мидамбул формирует ошибку оценки мидамбулы для каждой гипотезы, как подробнее описано выше. Схема 960 решения по времени сравнивает ошибки оценки мидамбулы для каждой гипотезы и выбирает гипотезу с наименьшей ошибкой оценки мидамбулы. Выбор гипотезы посредством модуля 960 решения по времени представляет позицию в пакете символов, где, как оценено, мидамбула начинается. Модуль 970 оценивателя частоты принимает выборки от модуля 960 решения по времени и формирует множество гипотез по частоте, касающихся частоты, на которой передаются символы. Модуль 940 подавителя помех итеративно выполняет подавление одноантенных помех для символов для каждой гипотезы по частоте, вычисляя различные весовые коэффициенты фильтрации для каждой гипотезы по частоте, и модуль 950 оценивателя мидамбул формирует ошибку оценки мидамбулы для каждой гипотезы, как подробнее описано выше. Схема 980 решения по частоте сравнивает ошибки оценки мидамбулы для каждой гипотезы и выбирает гипотезу с наименьшей ошибкой оценки мидамбулы. Выбор гипотезы посредством модуля 980 решения по частоте представляет оптимальную частоту для приема пакета символов. Сигнал затем предоставляется в модуль 990 процессора данных, который обрабатывает принимаемые символы на основе выбранных гипотез по времени и частоте и выводит данные, соответствующие принимаемым символам.
Фиг.10 иллюстрирует приемник для использования в системе беспроводной связи в соответствии с одним аспектом настоящей технологии. Приемник 1000 включает в себя антенный модуль 1010, выполненный, чтобы принимать беспроводной сигнал. Принимаемый сигнал предоставляется в модуль 1020 препроцессора, который демодулирует сигнал, чтобы формировать принимаемые выборки. Модуль 1020 препроцессора может включать в себя модуль циклического сдвигателя от-GMSK-к-BPSK, который выполняет циклический сдвиг фаз для принимаемых выборок. Модуль 1030 оценивателя времени и частоты принимает выборки от модуля 1020 препроцессора и формирует множество гипотез по времени и частоте, касающихся того, где обучающая последовательность символов (т.е. мидамбула) начинается в пакете данных (время) и на какой частоте символы могут оптимально приниматься (частота). Модуль 1040 подавителя помех итеративно выполняет подавление одноантенных помех для символов для каждой пары гипотез по времени и частоте, вычисляя различные весовые коэффициенты фильтрации для каждой пары гипотез, и модуль 1050 оценивателя мидамбул формирует ошибку оценки мидамбулы для каждой пары гипотез, как подробнее описано выше. Модуль 1060 решения по времени и частоте сравнивает ошибки оценки мидамбулы для каждой пары гипотез и выбирает пару с наименьшей ошибкой оценки мидамбулы. Выбор пары гипотез посредством модуля 1060 решения по времени и частоте представляет позицию в пакете символов, где, как оценено, мидамбула начинается, и оптимальную частоту для приема пакета символов. Сигнал затем предоставляется в модуль 1070 процессора данных, который обрабатывает принимаемые символы на основе выбранных гипотез по времени и частоте и выводит данные, соответствующие принимаемым символам.
Фиг.11 является блок-схемой, которая иллюстрирует компьютерную систему 1100, на которой может быть реализован аспект. Компьютерная система 1100 включает в себя шину 1102 или другой механизм связи для передачи информации и процессор 1104, соединенный с шиной 1102, для обработки информации. Компьютерная система 1100 также включает в себя запоминающее устройство 1106, такое как оперативное запоминающее устройство (RAM) или другое динамическое устройство хранения, соединенное с шиной 1102, для сохранения информации и инструкций, которые должны исполняться посредством процессора 1104. Запоминающее устройство 1106 также может использоваться для хранения временной переменной или другой промежуточной информации во время исполнения инструкций, которые должны исполняться посредством процессора 1104. Компьютерная система 1100 дополнительно включает в себя устройство 1110 хранения данных, такое как магнитный или оптический диск, соединенный с шиной 1102, для хранения информации и инструкций.
Компьютерная система 1100 может соединяться через модуль 1108 ввода-вывода с устройством отображения (не проиллюстрировано), таким как электронно-лучевая трубка (CRT) или жидкокристаллический дисплей (LCD) для отображения информации пользователю компьютера. Устройство ввода, такое как, например, клавиатура или мышь, также может быть соединено с компьютерной системой 1100 через модуль 1108 ввода-вывода для передачи информации и выборов команд для процессора 1104.
Согласно одному аспекту временная и частотная оценка выполняется посредством компьютерной системы 1100 в ответ на исполнение посредством процессора 1104 одной или более последовательностей из одной или более инструкций, вмещенных в запоминающее устройство 1106. Такие инструкции могут считываться в запоминающее устройство 1106 с другого машиночитаемого носителя, такого как устройство 1110 хранения данных. Исполнение последовательностей инструкций, вмещенных в основное запоминающее устройство 1106, побуждает процессор 1104 выполнять этапы процесса, описанные в данном документе. Один или более процессоров в многопроцессорной компоновке также могут использоваться для того, чтобы исполнять последовательности инструкций, вмещенных в запоминающее устройство 1106. В альтернативных аспектах может использоваться проводная схема вместо или в комбинации с программными инструкциями, чтобы реализовывать различные аспекты. Таким образом, аспекты не ограничены какой-либо конкретной комбинацией аппаратных схем и программного обеспечения.
Термин "машиночитаемый носитель" при использовании в данном документе упоминается как любой носитель, который участвует в предоставлении инструкций в процессор 1104 для исполнения. Этот носитель может принимать множество форм, в том числе, но не ограничиваясь этим, энергонезависимый носитель, энергозависимый носитель и среду передачи. Энергонезависимые носители включают в себя, например, оптические или магнитные диски, к примеру устройство 1110 хранения данных. Энергозависимые носители включают в себя динамическое запоминающее устройство, такое как запоминающее устройство 1106. Среды передачи включают в себя коаксиальные кабели, медный провод и оптоволокно, включая провода, которые содержат шину 1102. Среды передачи также могут принимать форму акустических или световых волн, таких как сформированные в ходе радиочастотного и инфракрасного обмена данными. Общие формы машиночитаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любую другую физическую среду с шаблонами отверстий, RAM, PROM, EPROM, FLASH EPROM, любую другую микросхему или картридж запоминающего устройства, несущую волну или любой другой носитель, с которого компьютер может выполнять считывание.
Специалисты в данной области техники должны принимать во внимание, что различные иллюстративные блоки, модули, элементы, компоненты, способы и алгоритмы, описанные в данном документе, могут быть реализованы как электронное аппаратное обеспечение, компьютерное программное обеспечение или комбинации означенного. Кроме того, они могут быть поделены по-другому, чем описано. Чтобы понятно проиллюстрировать эту взаимозаменяемость аппаратного обеспечения и программного обеспечения, различные иллюстративные блоки, модули, элементы, компоненты, способы и алгоритмы описаны выше в целом на основе их функциональности. Реализована эта функциональность в качестве аппаратного обеспечения или программного обеспечения, зависит от конкретного варианта применения и проектных ограничений, накладываемых на систему в целом. Специалисты в данной области техники могут реализовывать описанную функциональность разнообразными путями для каждого конкретного варианта применения.
Следует понимать, что конкретный порядок или иерархия этапов или блоков в раскрытых процессах являются иллюстрацией примерных подходов. На основе проектных предпочтений следует понимать, что конкретный порядок или иерархия этапов или блоков в процессах могут перекомпоновываться. Пункты способа в прилагаемой формуле изобретения представляют элементы различных этапов в примерном порядке и не предназначены быть ограниченными конкретным представленным порядком или иерархией.
Вышеприведенное описание предоставлено для того, чтобы дать возможность всем специалистам в данной области техники осуществлять на практике различные аспекты, описанные в данном документе. Различные модификации в этих аспектах должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим аспектам. Таким образом, формула изобретения не предназначена быть ограниченной аспектами, показанными в данном документе, а должна соответствовать полному объему в согласии с формулой изобретения, при этом ссылка на элемент в единственном числе предназначена означать не "один и только один", если не указано иное в явной форме, а, наоборот, "один или более". Если прямо не указано иное, термин "несколько" означает один или более. Местоимения в мужском роде (к примеру, его) включают в себя женский и средний род (к примеру, ее и его), и наоборот. Все структурные и функциональные эквиваленты элементов различных аспектов, описанных в данной заявке, которые известны или станут в дальнейшем известными специалистам в данной области техники, в явной форме заключены в данный документ посредством ссылки и предназначены быть охватываемыми формулой изобретения. Более того, ничего из раскрытого в данном документе не предназначено становиться всеобщим достоянием, независимо от того, указано или нет данное раскрытие сущности в явной форме в формуле изобретения. Ни один элемент пункта формулы изобретения не должен трактоваться как подчиняющийся условиям шестого абзаца § 112 Раздела 35 Кодекса США, если только элемент не изложен в явной форме с использованием фразы "средство для" или если в пункте формулы изобретения, касающемся способа, элемент не изложен с использованием фразы "этап для".
| название | год | авторы | номер документа |
|---|---|---|---|
| КОГЕРЕНТНАЯ КОМПЕНСАЦИЯ ПОМЕХ С ОДНОЙ АНТЕННОЙ ДЛЯ GSM/GPRS/EDGE | 2009 |
|
RU2461135C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ СДВИГА НЕСУЩЕЙ ЧАСТОТЫ И СИНХРОНИЗАЦИИ КАДРА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2427094C2 |
| ПЕРЕДАЧИ СИНХРОНИЗАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2449471C2 |
| ОБЕСПЕЧЕНИЕ АНТЕННОГО РАЗНЕСЕНИЯ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2424617C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2420873C2 |
| ПЕРЕДАЧИ СИНХРОНИЗАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2547094C2 |
| ВЫСОКОЭФФЕКТИВНАЯ СТАНЦИЯ | 2008 |
|
RU2496244C2 |
| ПОИСК СОТЫ УЗКОПОЛОСНОЙ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2689989C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2454797C1 |
| ПЕРЕДАТЧИК И ПРИЕМНИК И СООТВЕТСТВУЮЩИЕ СПОСОБЫ | 2018 |
|
RU2733532C1 |
Изобретение относится к беспроводной связи. Техническим результатом является обеспечение подавления помех при нестационарных условиях. Предоставлен способ для временной и частотной синхронизации в беспроводной системе. Способ содержит этапы приема пакета символов, выбора поднабора пакета символов, итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и вычисления, для каждого сдвига по времени, первого показателя производительности, соответствующего отрегулированному поднабору. Способ дополнительно содержит этапы определения одного из множества сдвигов по времени как предпочтительного сдвига по времени на основе его первого показателя производительности, итеративного циклического сдвига поднабора пакета символов посредством множества сдвигов по частоте и вычисления, для каждого сдвига по частоте, второго показателя производительности, соответствующего циклически сдвинутому поднабору, и определения одного из множества сдвигов по частоте как предпочтительного сдвига по частоте на основе его второго показателя производительности. 8 н. и 64 з.п. ф-лы, 11 ил.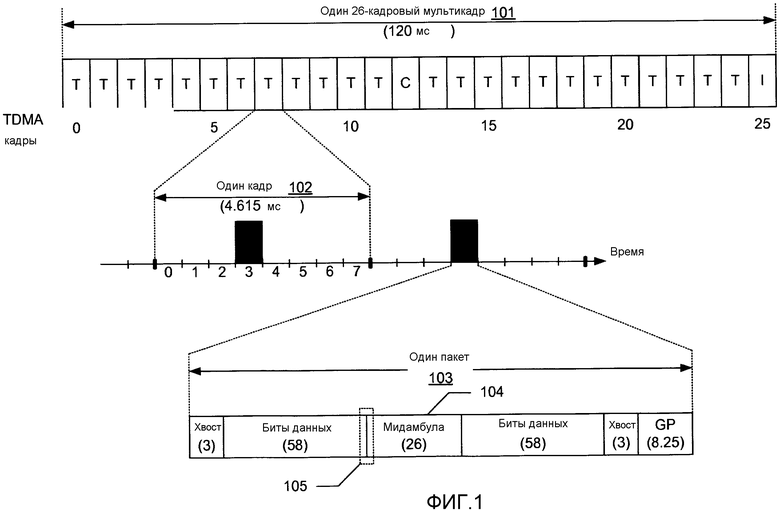
1. Способ для временной и частотной синхронизации в беспроводной системе, содержащий этапы, на которых:
- принимают пакет символов;
- выбирают поднабор пакета символов;
- итеративно регулируют поднабор пакета символов посредством множества сдвигов по времени;
- вычисляют, для каждого сдвига по времени, первый показатель производительности, соответствующий отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени;
- определяют один из множества сдвигов по времени, как предпочтительный сдвиг по времени на основе его первого показателя производительности;
- итеративно циклически сдвигают поднабор пакета символов посредством множества сдвигов по частоте;
- вычисляют, для каждого сдвига по частоте, второй показатель производительности, соответствующий циклически сдвинутому поднабору, посредством итеративного выполнения SAIC по символам для каждого сдвига по времени, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени; и
- определяют один из множества сдвигов по частоте, как предпочтительный сдвиг по частоте на основе его второго показателя производительности.
2. Способ по п.1, в котором первым показателем производительности является ошибка оценки мидамбулы.
3. Способ по п.2, в котором ошибку оценки мидамбулы вычисляют для каждого сдвига по времени посредством этапов, на которых:
- вычисляют множество весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- фильтруют пакет символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов, чтобы получать оцененную последовательность мидамбулы; и
- сравнивают оцененную последовательность мидамбулы с ранее известной последовательностью мидамбулы, чтобы определять ошибку оценки мидамбулы.
4. Способ по п.3, в котором множество весовых коэффициентов вычисляют посредством решения для следующего:

где  - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [X].
- это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [X].
5. Способ по п.3, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
6. Способ по п.3, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
7. Способ по п.1, в котором вторым показателем производительности является ошибка оценки мидамбулы.
8. Способ по п.7, в котором ошибку оценки мидамбулы вычисляют для каждого сдвига по частоте посредством этапов, на которых:
- вычисляют множество весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- фильтруют пакет символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов, чтобы получать оцененную последовательность мидамбулы; и
- сравнивают оцененную последовательность мидамбулы с ранее известной последовательностью мидамбулы, чтобы определять ошибку оценки мидамбулы.
9. Способ по п.8, в котором множество весовых коэффициентов вычисляют посредством решения для следующего:

где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [X].
10. Способ по п.8, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
11. Способ по п.1, в котором поднабор пакета символов включает в себя первый символ мидамбулы.
12. Способ по п.11, в котором множество сдвигов по времени определяют посредством этапа, на котором оценивают позицию первого символа мидамбулы в пакете символов и выбирают поднабор пакета символов из символов, центрированных вокруг оцененной позиции.
13. Способ для временной и частотной синхронизации в беспроводной системе, содержащий этапы, на которых:
- принимают пакет символов;
- выбирают поднабор пакета символов;
- итеративно регулируют поднабор пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте;
- вычисляют для каждого сдвига по времени и частоте показатель производительности, соответствующий отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени и частоте, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени и частоте; и
- определяют один сдвиг по времени, как предпочтительный сдвиг по времени и один сдвиг по частоте, как предпочтительный сдвиг по частоте на основе его показателя производительности.
14. Способ по п.13, в котором показателем производительности является ошибка оценки мидамбулы.
15. Способ по п.14, в котором ошибку оценки мидамбулы вычисляют для каждого сдвига по времени и частоте посредством этапов, на которых:
- вычисляют множество весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- фильтруют пакет символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов, чтобы получать оцененную последовательность мидамбулы; и
- сравнивают оцененную последовательность мидамбулы с ранее известной последовательностью мидамбулы, чтобы определять ошибку оценки мидамбулы.
16. Способ по п.15, в котором множество весовых коэффициентов вычисляют посредством решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [X].
17. Способ по п.15, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
18. Способ по п.15, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
19. Беспроводное устройство, содержащее:
- приемник, выполненный, чтобы принимать пакет символов; и
- процессор, выполненный, чтобы:
- выбирать поднабор пакета символов;
- итеративно регулировать поднабор пакета символов посредством множества сдвигов по времени;
- вычислять, для каждого сдвига по времени, первый показатель производительности, соответствующий отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени;
- определять один из множества сдвигов по времени, как предпочтительный сдвиг по времени на основе его первого показателя производительности;
- итеративно циклически сдвигать поднабор пакета символов посредством множества сдвигов по частоте;
- вычислять для каждого сдвига по частоте второй показатель производительности, соответствующий циклически сдвинутому поднабору, посредством итеративного выполнения SAIC по символам для каждого сдвига по времени, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени; и
- определять один из множества сдвигов по частоте, как предпочтительный сдвиг по частоте на основе его второго показателя производительности.
20. Беспроводное устройство по п.19, в котором первым показателем производительности является ошибка оценки мидамбулы.
21. Беспроводное устройство по п.20, в котором процессор выполнен, чтобы вычислять ошибку оценки мидамбулы для каждого сдвига по времени посредством следующего:
- вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
22. Беспроводное устройство по п.21, в котором процессор выполнен, чтобы вычислять множество весовых коэффициентов посредством решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [Х]T - это транспонирование от [X].
23. Беспроводное устройство по п.21, в котором фильтром подавления помех является фильтр подавления одиоантенных помех.
24. Беспроводное устройство по п.21, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
25. Беспроводное устройство по п.19, в котором вторым показателем производительности является ошибка оценки мидамбулы.
26. Беспроводное устройство по п.25, в котором процессор выполнен, чтобы вычислять ошибку оценки мидамбулы для каждого сдвига по частоте посредством следующего:
- вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
27. Беспроводное устройство по п.26, в котором процессор выполнен, чтобы вычислять множество весовых коэффициентов посредством решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [X] - это матрица пространственно-временных выборок пакета символов и [Х]T - это транспонирование от [Х].
28. Беспроводное устройство по п.26, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
29. Беспроводное устройство по п.19, в котором поднабор пакета символов включает в себя первый символ мидамбулы.
30. Беспроводное устройство по п.29, в котором процессор выполнен, чтобы определять множество сдвигов по времени посредством оценки позиции первого символа мидамбулы в пакете символов и выбора поднабора пакета символов из символов, центрированных вокруг оцененной позиции.
31. Беспроводное устройство, содержащее:
- приемник, выполненный, чтобы принимать пакет символов; и
- процессор, выполненный, чтобы:
- принимать пакет символов;
- выбирать поднабор пакета символов;
- итеративно регулировать поднабор пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте;
- вычислять, для каждого сдвига по времени и частоте, показатель производительности, соответствующий отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени и частоте, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени и частоте; и
- определять один сдвиг по времени, как предпочтительный сдвиг по времени и один сдвиг по частоте, как предпочтительный сдвиг по частоте на основе его показателя производительности.
32. Беспроводное устройство по п.31, в котором показателем производительности является ошибка оценки мидамбулы.
33. Беспроводное устройство по п.32, в котором процессор выполнен, чтобы вычислять ошибку оценки мидамбулы для каждого сдвига по времени и частоте посредством следующего:
- вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
34. Беспроводное устройство по п.33, в котором процессор выполнен, чтобы вычислять множество весовых коэффициентов посредством решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [Х].
35. Беспроводное устройство по п.33, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
36. Беспроводное устройство по и.33, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
37. Беспроводное устройство, содержащее:
- средство для приема пакета символов;
- средство для выбора поднабора пакета символов;
- средство для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени;
- средство для вычисления, для каждого сдвига по времени, первого показателя производительности, соответствующего отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени;
- средство для определения одного из множества сдвигов по времени, как предпочтительного сдвига по времени на основе его первого показателя производительности;
- средство для итеративного циклического сдвига поднабора пакета символов посредством множества сдвигов по частоте и вычисления, для каждого сдвига по частоте, второго показателя производительности, соответствующего циклически сдвинутому поднабору; и
- средство для определения одного из множества сдвигов по частоте, как предпочтительного сдвига по частоте на основе его второго показателя производительности.
38. Беспроводное устройство по п.37, в котором первым показателем производительности является ошибка оценки мидамбулы.
39. Беспроводное устройство по п.38, в котором средство для вычисления ошибки оценки мидамбулы для каждого сдвига по времени содержит:
- средство для вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- средство для фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- средство для сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
40. Беспроводное устройство по п.39, в котором средство для вычисления множества весовых коэффициентов содержит средство для решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [Х]T - это транспонирование от [X].
41. Беспроводное устройство по п.39, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
42. Беспроводное устройство по п.39, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
43. Беспроводное устройство по п.37, в котором вторым показателем производительности является ошибка оценки мидамбулы.
44. Беспроводное устройство по п.43, в котором средство для вычисления ошибки оценки мидамбулы для каждого сдвига по частоте содержит:
- средство для вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- средство для фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- средство для сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
45. Беспроводное устройство по п.44, в котором средство для вычисления множества весовых коэффициентов содержит средство для решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [Х].
46. Беспроводное устройство по п.44, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
47. Беспроводное устройство по п.37, в котором поднабор пакета символов включает в себя первый символ мидамбулы.
48. Беспроводное устройство по п.47, в котором множество сдвигов по времени определяют посредством оценки позиции первого символа мидамбулы в пакете символов и выбора поднабора пакета символов из символов, центрированных вокруг оцененной позиции.
49. Беспроводное устройство, содержащее:
- средство для приема пакета символов;
- средство для выбора поднабора пакета символов;
- средство для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте;
- средство для вычисления, для каждого сдвига по времени и частоте, показателя производительности, соответствующего отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени и частоте, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени и частоте; и
- средство для определения одного сдвига по времени и частоте как предпочтительного сдвига по времени и частоте на основе его показателя производительности.
50. Беспроводное устройство по п.49, в котором показателем производительности является ошибка оценки мидамбулы.
51. Беспроводное устройство по п.50, в котором средство для вычисления ошибки оценки мидамбулы для каждого сдвига по времени и частоте содержит:
- средство для вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- средство для фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- средство для сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
52. Беспроводное устройство по п.51, в котором средство для вычисления множества весовых коэффициентов содержит средство для решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [Х] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [Х].
53. Беспроводное устройство по п.51, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
54. Беспроводное устройство по п.51, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
55. Компьютерно-читаемый носитель, содержащий набор сохраненных в нем инструкций, причем набор инструкций исполняется посредством одного или более процессоров для выполнения способа для временной и частотной синхронизации в беспроводной системе, причем набор инструкций содержит:
- инструкции для приема пакета символов;
- инструкции для выбора поднабора пакета символов;
- инструкции для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени;
- инструкции для вычисления, для каждого сдвига по времени, первого показателя производительности, соответствующего отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени;
- инструкции для определения одного из множества сдвигов по времени, как предпочтительного сдвига по времени на основе его первого показателя производительности;
- инструкции для итеративного циклического сдвига поднабора пакета символов посредством множества сдвигов по частоте и для вычисления, для каждого сдвига по частоте, второго показателя производительности, соответствующего циклически сдвинутому поднабору; и
- инструкции для определения одного из множества сдвигов по частоте, как предпочтительного сдвига по частоте на основе его второго показателя производительности.
56. Компьютерно-читаемый носитель по п.55, в котором первым показателем производительности является ошибка оценки мидамбулы.
57. Компьютерно-читаемый носитель по п.56, в котором инструкции для вычисления ошибки оценки мидамбулы для каждого сдвига по времени содержат:
- инструкции для вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- инструкции для фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- инструкции для сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
58. Компьютерно-читаемый носитель по п.57, в котором инструкции для вычисления множества весовых коэффициентов содержат инструкции для решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [X] - это матрица пространственно-временных выборок пакета символов и [Х]T - это транспонирование от [Х].
59. Компьютерно-читаемый носитель по п.57, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
60. Компьютерно-читаемый носитель по п.57, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
61. Компьютерно-читаемый носитель по п.55, в котором вторым показателем производительности является ошибка оценки мидамбулы.
62. Компьютерно-читаемый носитель по п.61, в котором инструкции для вычисления ошибки оценки мидамбулы для каждого сдвига по частоте содержат:
- инструкции для вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- инструкции для фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- инструкции для сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
63. Компьютерно-читаемый носитель по п.62, в котором инструкции для вычисления множества весовых коэффициентов содержат инструкции для решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [X] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [X].
64. Компьютерно-читаемый носитель по п.62, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
65. Компьютерно-читаемый носитель по п.55, в котором поднабор пакета символов включает в себя первый символ мидамбулы.
66. Компьютерно-читаемый носитель по п.65, в котором множество сдвигов по времени определяют посредством оценки позиции первого символа мидамбулы в пакете символов и выбора поднабора пакета символов из символов, центрированных вокруг оцененной позиции.
67. Компьютерно-читаемый носитель, содержащий набор сохраненных в нем инструкций, причем набор инструкций исполняется посредством одного или более процессоров для выполнения способа для временной и частотной синхронизации в беспроводной системе, причем набор инструкций содержит:
- инструкции для приема пакета символов;
- инструкции для выбора поднабора пакета символов;
- инструкции для итеративного регулирования поднабора пакета символов посредством множества сдвигов по времени и множества сдвигов по частоте;
- инструкции для вычисления, для каждого сдвига по времени и частоте, показателя производительности, соответствующего отрегулированному поднабору, посредством итеративного выполнения подавления одноантенных помех (SAIC) по символам для каждого сдвига по времени и частоте, в том числе вычисления различных весовых коэффициентов фильтрации для каждого сдвига по времени и частоте; и
- инструкции для определения одного сдвига по времени и частоте, как предпочтительного сдвига по времени и частоте на основе его показателя производительности.
68. Компьютерно-читаемый носитель по п.67, в котором показателем производительности является ошибка оценки мидамбулы.
69. Компьютерно-читаемый носитель по п.68, в котором инструкции для вычисления ошибки оценки мидамбулы для каждого сдвига по времени и частоте содержат:
- инструкции для вычисления множества весовых коэффициентов для фильтра подавления помех на основе поднабора пакета символов;
- инструкции для фильтрации пакета символов с использованием фильтра подавления помех с соответствующим множеством весовых коэффициентов для получения оцененной последовательности мидамбулы; и
- инструкции для сравнения оцененной последовательности мидамбулы с ранее известной последовательностью мидамбулы для определения ошибки оценки мидамбулы.
70. Компьютерно-читаемый носитель по п.69, в котором инструкции для вычисления множества весовых коэффициентов содержат инструкции для решения для следующего:
где - это вектор, соответствующий оценке поднабора символов, [X] - это матрица пространственно-временных выборок пакета символов и [X]T - это транспонирование от [Х].
71. Компьютерно-читаемый носитель по п.69, в котором фильтром подавления помех является фильтр подавления одноантенных помех.
72. Компьютерно-читаемый носитель по п.69, в котором фильтром подавления помех является фильтр подавления двухантенных помех.
| HEINRICH MEYR ET AL, «Digital Communication Receivers: Synchronization, Channel Estimation, and Signal Processing», 1997, [он-лайн], [найдено 17.02.12] | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ЧАСТИЧНО КОГЕРЕНТНЫЕ СИГНАЛЬНЫЕ СОВОКУПНОСТИ ДЛЯ СИСТЕМ С МНОЖЕСТВОМ АНТЕНН | 2004 |
|
RU2319307C2 |
| СИНХРОНИЗАЦИЯ К БАЗОВОЙ СТАНЦИИ И ПОЛУЧЕНИЕ КОДА В СИСТЕМЕ СВЯЗИ С ПЕРЕДАЧЕЙ СИГНАЛА В ШИРОКОМ СПЕКТРЕ | 1998 |
|
RU2211531C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 1999 |
|
RU2233033C2 |

