Настоящее изобретение относится к высотному подъемнику и транспортному средству, оборудованному таким подъемником.
Высотный подъемник (или устройство, обеспечивающее подъем на высоту) в рамках данного документа обозначает, прежде всего, устройство, включающее лестницу. Однако этому обозначению придается также смысл устройства, выполняющего функции лифта для мебели или для материалов или подъемного рычага.
Высотный подъемник включает секцию, которая ориентирована существенным образом вдоль одной оси и в типичном случае может представлять собой раздвижную лестницу или, как вариант, телескопическую стрелу. Эта секция может быть снабжена подъемной люлькой, которую можно также описать как клеть, платформу или любую иную опорную конструкцию. Как вариант, люлька может двигаться вдоль секции или же, в ином случае, крепиться на незакрепленном конце секции, который будет подниматься.
Согласно известным техническим решениям устройства, обеспечивающие подъем на высоту, включают также основание. При этом подвижная секция шарнирно крепится на основании так, что ее незакрепленный конец может подниматься. Основание, в свою очередь, имеет конструкцию, позволяющую ему быть закрепленным на опоре.
Кроме того, предусматривается устройство для управления шарнирным поворотом секции, подвижной относительно основания, обеспечивающее подъем незакрепленного конца подвижной секции.
В случае подъемного рычага секция будет образована, например, первым выдвижным коленом, шарнирно установленным на основании так, что один конец этого первого колена может подниматься относительно основания. Подъемный рычаг может включать одно или несколько других коленьев, шарнирно устанавливаемых одно на другое, причем люлька крепится на незакрепленный конец последнего колена.
Таким образом, понятие «высотный подъемник» в настоящем изобретении подразумевает устройство, которое делает возможным для лица или предмета достичь положения на некоторой высоте над землей, а также положения, расположенного ниже плоскости опоры этого устройства
Однако использование такого высотного подъемника может оказаться сложным или даже опасным, когда его основание располагается на опоре, не являющейся ровной, и тогда уклон или смещение опоры будут усиливаться для незакрепленного конца секции, причем в прямой зависимости от степени подъема и/или выдвижения этого конца.
В качестве способа коррекции положения лестницы при неровном положении опоры во Французской заявке FR 2,631,377, принадлежащей заявителю, предложено устройство для применения в спасательных службах или на производстве, которое включает подвижную несущую секцию значительной длины, ориентированную существенным образом вдоль первой оси. Эта секция установлена на опоре, которая предназначается для установки на шасси транспортного средства. Опора включает вращающуюся станину, на которой установлена поворотная каретка для подъема секции. Одним из своих концов подвижная несущая секция крепится на поворотной каретке с возможностью вращения относительно второй оси, которая параллельна оси подвижной несущей секции. Вторая ось располагается в плоскости, которая включает ось вращения станины и перпендикулярна оси подъема каретки. Дополнительно, помимо силовых цилиндров, обеспечивающих подъем подвижной несущей секции, предусмотрены средства для приведения подвижной несущей секции во вращение относительно второй оси в целях восстановления горизонтального расположения ступенек (иначе говоря, в целях коррекции неровного положения) подвижной несущей секции, люльки и любого другого опорного элемента, зафиксированного на подвижной несущей секции.
Однако это устройство имеет сложную конструкцию. Кроме того, имеется некоторый зазор между подвижной несущей секцией и кареткой, который изменяется при мере использования, что означает, что такое устройство создает определенный риск травм для пользователя, особенно в результате защемления между подвижной несущей секцией и кареткой. Чтобы полностью избежать риска травмирования, между кареткой и подвижной несущей секцией такого устройства обычно устанавливаются средства защиты. В общем случае средства защиты имеют вид гофрированных пластин, устанавливаемых между кареткой и подвижной несущей секцией с целью воспрепятствовать случайному попаданию кого-либо или чего-либо между кареткой и подвижной несущей секцией.
Кроме этого, есть патентная заявка Германии DE 19653376, где описывается устройство с лестницей, включающее основание и лестницу, прикрепленную к каретке. Каретка крепится на основании с возможностью шарнирного поворота относительно оси подъема, что обеспечивает подъем незакрепленного конца лестницы относительно основания. Основание при этом установлено на опоре с возможностью шарнирного поворота относительно горизонтальной оси, перпендикулярной к оси подъема. Таким образом, в устройстве согласно DE 19653376 коррекция неровного расположения лестницы достигается путем коррекции неровного расположения указанного основания по отношению к опоре. Для достижения этой цели с обеих сторон лестницы установлены два силовых цилиндра, каждый из которых зафиксирован на опоре и каретке, причем выдвижение штоков каждого из силовых цилиндров может регулироваться автономно.
В этом устройстве для корректировки неровного расположения приходится перемещать значительный вес, что, следовательно, требует значительного расхода энергии. Если используемые силовые цилиндры являются гидравлическими, значительное количество энергии, необходимой для коррекции неровного расположения, в этом устройстве находит выражение либо в использовании значительного объема рабочей жидкости, либо в применении средств повышения давления рабочей жидкости. В том и в другом случае для правильной работы устройства требуются сложные и громоздкие приспособления.
Кроме того, особые трудности вызывает применение этого устройства в условиях ограниченного пространства. Фактически компенсация неровного расположения требует здесь значительного перемещения лестницы и особенно ее незакрепленного конца.
С учетом вышесказанного цель настоящего изобретения состоит в том, чтобы предложить улучшенный высотный подъемник, в частности, лишенный недостатков известного устройства.
Эта цель достигается в данном изобретении в конструкции высотного подъемника, который содержит:
- основание,
- секцию, которая ориентирована существенным образом вдоль первой оси и у которой незакрепленный конец выполнен с возможностью подъема,
- проставку, расположенную между указанной секцией и основанием, причем указанная секция установлена на проставке с возможностью поворота относительно второй оси для коррекции неровного расположения указанной секции, причем проставка установлена на основании c возможностью шарнирного поворота относительно третьей оси, что обеспечивает подъем указанного незакрепленного конца указанной секции относительно основания,
- два подъемных устройства для указанной секции, шарнирно установленных на указанном основании, неразъемно соединенных с указанной секцией с обеих сторон от указанной первой оси, и
- управляющее устройство, обеспечивающее управление каждым из указанных подъемных устройств указанной секции.
Таким образом, в данном изобретении коррекция неровного расположения секции достигается исключительно путем перемещения секции относительно шарнирной оси, находящейся рядом с осью самой секции. При такой коррекции неровного расположения расстояние, на которое смещается секция, значительно меньше, чем в случае известного устройства, где поворот секции происходит относительно той оси, на которой основание поворачивается относительно опоры устройства. Поэтому устройство по данному изобретению является более маневренным. Кроме того, поскольку меньшее количество деталей вовлечено в движение, снижается вес, который необходимо перемещать. Благодаря этому устройство по данному изобретению потребляет меньше энергии для заданной коррекции неровного расположения, чем устройство, описанное выше.
Кроме того, за счет того, что предусмотрено управляющее устройство для каждого из двух подъемных устройств, появляется возможность использовать подъемные устройства одновременно и для подъема секции, и для коррекции неровного расположения посредством соответствующего управления этими подъемными устройствами.
В различных реализациях высотный подъемник по изобретению может характеризоваться одним или несколькими из следующих признаков, отдельно взятыми или в комбинации:
- расстояние между второй и третьей осями не превышает 60 см и предпочтительно равно нулю, причем указанное расстояние измеряется по четвертой оси, находящейся в медиальной плоскости указанного высотного подъемника, перпендикулярной к указанной оси коррекции неровного расположения и пересекающей указанную ось подъема;
- расстояние между первой и второй осями не превышает 50 см, предпочтительно не превышает 30 см, более предпочтительно не превышает 20 см и еще более предпочтительно равно нулю, причем указанное расстояние измеряется по четвертой оси, находящейся в медиальной плоскости устройства, перпендикулярной к оси коррекции неровного расположения и пересекающей ось подъема;
- проставка представляет собой каретку, причем указанная секция крепится на каретке с возможностью шарнирного поворота относительно второй оси, каретка закреплена на основании с возможностью шарнирного поворота относительно третьей оси, и каждое из двух подъемных устройств шарнирно соединено с указанной секцией;
- секция включает каретку;
- каждое из двух подъемных устройств шарнирно соединено с указанной секцией;
- каждое из двух подъемных устройств шарнирно установлено на каретке;
- каждое из подъемных устройств указанной секции является одинарным или спаренным силовым цилиндром;
- секция включает лестницу или стрелу;
- на секции установлена люлька;
- люлька может совершать поступательное движение по секции:
- расстояние между осями подъемных устройств у секции или у каретки отлично от расстояния между осями подъемных устройств у основания;
- основание включает вращающуюся станину, конструкция которой позволяет установить ее на опоре с возможностью шарнирного поворота относительно пятой оси, перпендикулярной к опоре;
- подъемные устройства представляют собой силовые цилиндры, и управляющее устройство может получать информацию о горизонтальности указанного основания и о подъеме секции относительно основания и за счет этого раздельно регулировать выдвижение штоков каждого из двух силовых цилиндров с целью коррекции неровного расположения секции;
- подъемные устройства представляют собой гидравлические силовые цилиндры, и управляющее устройство может получать информацию о неровном расположении секции и за счет этого регулировать перетекание рабочей жидкости из одного силового цилиндра в другой силовой цилиндр с целью коррекции неровного расположения секции;
- вторая ось параллельна первой оси.
Изобретение также предусматривает транспортное средство, на котором установлен высотный подъемник, описанный выше в любой комбинации признаков.
Другие признаки и преимущества изобретения станут более очевидны при прочтении нижеследующего описания одной из реализаций изобретения, которое приводится в качестве примера, с обращением к прилагаемым чертежам.
На Фиг.1 показана предпочтительная реализация устройства на виде сзади.
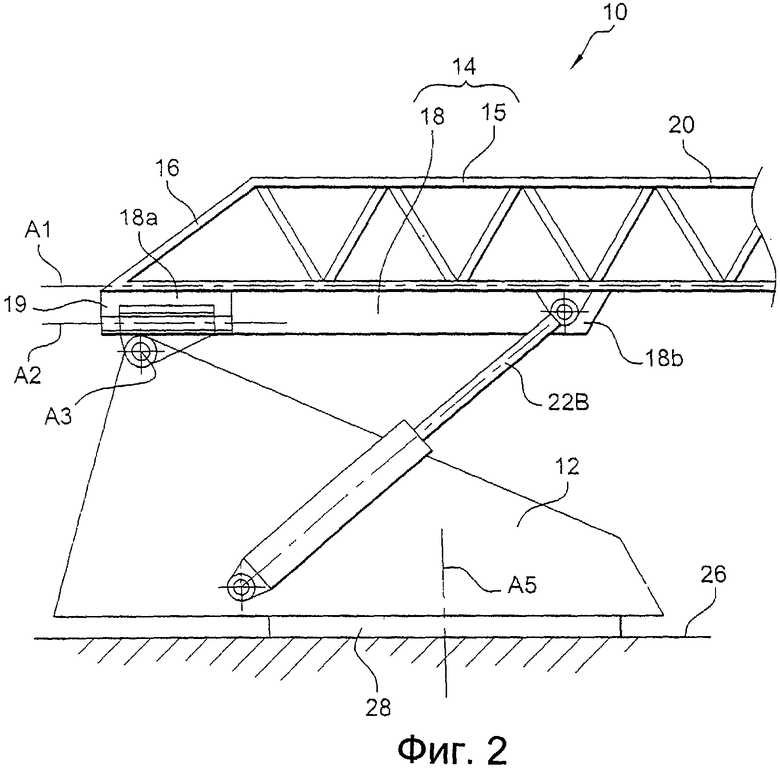
На Фиг.2 устройство Фиг.1 показано в виде сбоку.
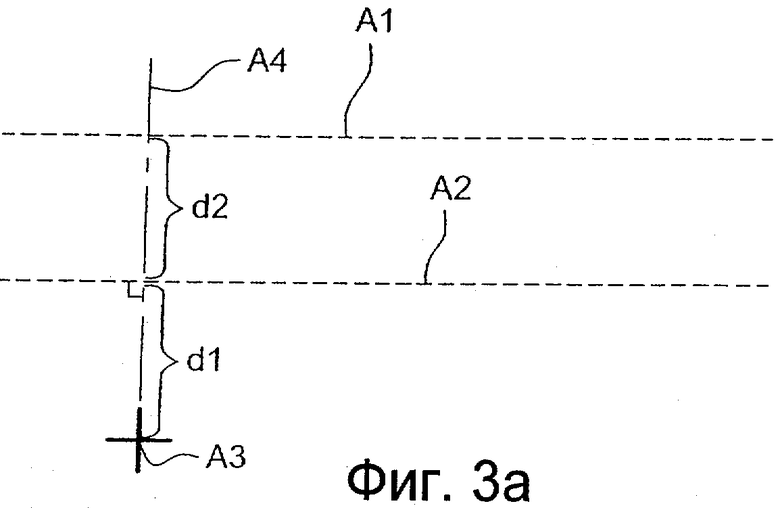
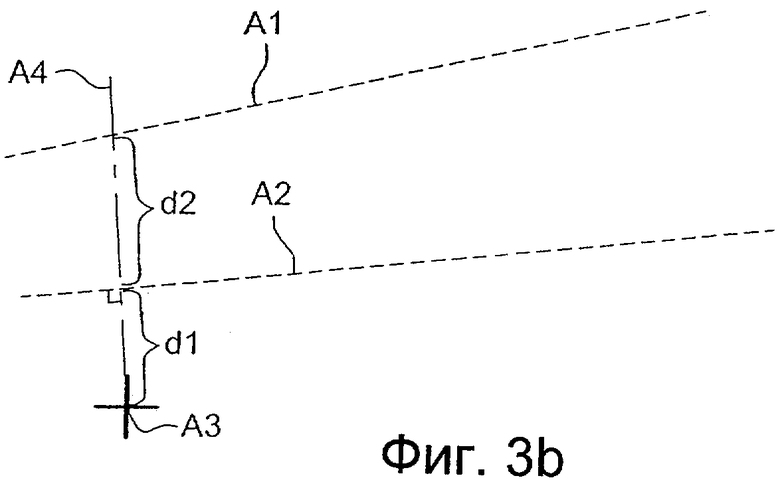
Фиг.3а и 3b схематически иллюстрируют принцип, используемый при измерении, во-первых, расстояния между осью секции и оси коррекции неровного расположения и, во-вторых, расстояния между осью коррекции неровного расположения и осью подъема секции.
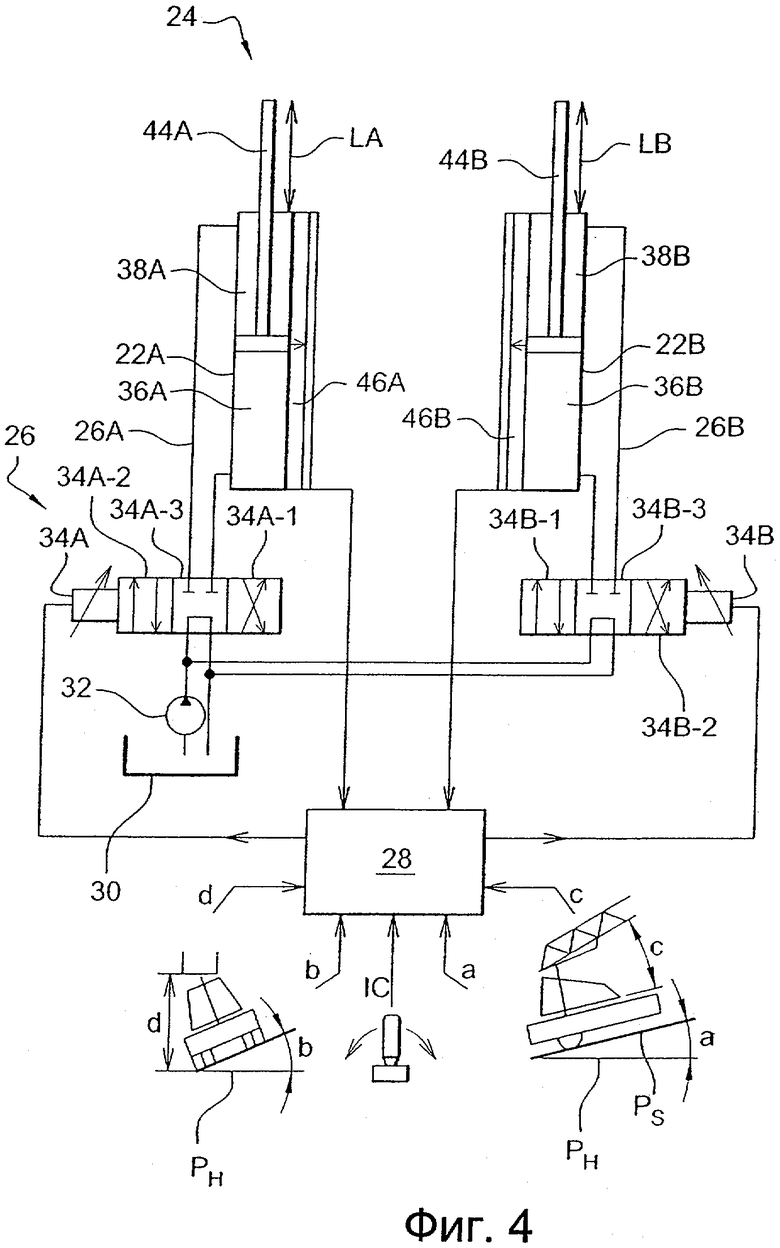
На Фиг.4 схематически представлена первая реализация устройства, управляющего выдвижением штоков силовых цилиндров, реализованного в высотном подъемнике, изображенном на Фиг.1 и 2.
На Фиг.5 схематически представлена вторая реализация устройства, управляющего выдвижением штоков силовых цилиндров, реализованного в высотном подъемнике Фиг.1 и 2.
Высотный подъемник 10, изображенный на Фиг.1 и 2, включает основание 12 и секцию 14, существенным образом ориентированную вдоль первой оси А1. Секция 14 включает в рассматриваемом случае лестницу 15 и каретку 18, причем лестница 15 крепится своим концом 16 к каретке 18. В рассматриваемом случае первая ось А1 (обозначаемая далее как «ось А1 лестницы 15») представляет собой, например, как показано на Фиг.1 и 2, медиальную ось плоскости основания лестницы 15.
При этом каретка 18 шарнирно установлена на проставке 19, которая вставлена между секцией 14, точнее кареткой 18 и основанием 12.
Как показано на Фиг.1 и 2, каретка 18 (а, следовательно, и подвижная секция 14) закреплена одним концом 18а на указанной проставке 19 с возможностью шарнирного поворота относительно второй оси А2 в целях коррекции неровного расположения секции 14.
В рассматриваемом случае ось А2 коррекции неровного расположения параллельна оси А1 лестницы 15. Специалистам в данной области техники, однако, известно, что ось А2 коррекции неровного расположения необязательно должна быть параллельна оси А1 лестницы (см., в частности, Фиг.3d). Эти две оси могут в частном случае образовывать острый угол в плоскости Фиг.2, то есть в медиальной плоскости высотного подъемника 10. Однако при заданной коррекции неровного расположения конфигурация, при которой ось А2 коррекции неровного расположения параллельна оси А1 лестницы 15, позволяет провести эту коррекцию с меньшим перемещением незакрепленного конца лестницы по сравнению со случаем, когда две эти оси образуют острый угол.
Проставка 19, помимо этого, устанавливается на основании 12 с возможностью шарнирного поворота относительно третьей оси A3 (обозначаемая далее как «ось подъема A3»), чтобы обеспечить подъем подвижной секции и тем самым подъем незакрепленного конца 20 лестницы 15 относительно основания 12.
На Фиг.3а и 3b схематически показаны две альтернативные конфигурации взаимного расположения оси А1 лестницы, оси А2 коррекции неровного расположения и оси A3 подъема в медиальной плоскости высотного подъемника, изображенного на Фиг.1 и 2. На Фиг.3а ось А1 лестницы и ось А2 коррекции неровного расположения параллельны. Напротив, на Фиг.3b ось А1 лестницы и ось А2 коррекции неровного расположения образуют в медиальной плоскости высотного подъемника острый угол. В обоих случаях, однако, ось A3 подъема перпендикулярна к медиальной плоскости высотного подъемника и перпендикулярна к оси А1 лестницы и к оси А2 коррекции неровного расположения.
На Фиг.3а и 3b мы определяем первое расстояние d1 как расстояние между осью А2 коррекции неровного расположения и осью A3 подъема, причем это расстояние d1 измеряется по четвертой оси А4, проходящей в медиальной плоскости высотного подъемника 10 перпендикулярно к оси А2 коррекции неровного расположения и пересекая ось A3 подъема.
Там же, на Фиг.3а и 3b, мы определяем второе расстояние d2 как расстояние между осью А1 лестницы и осью А2 коррекции неровного расположения, причем это второе расстояние d2 измеряется по четвертой оси А4, определенной выше.
Предпочтительно, чтобы в высотном подъемнике 10 расстояние d1 между осью А2 коррекции неровного расположения и осью A3 подъема не превышало 60 см и предпочтительно было равно нулю. В результате этого уменьшения расстояния между осью А2 коррекции неровного расположения и осью A3 подъема при движении устройства на транспортном средстве центр тяжести секции 14 оказывается более низким, чем в обычном устройстве. Снижение центра тяжести способствует более безопасному движению транспортного средства, на котором установлено устройство благодаря существенному повышению устойчивости, особенно на поворотах.
Далее, предпочтительно, чтобы в высотном подъемнике 10 расстояние d2 между осью А1 лестницы и осью А2 коррекции неровного расположения не превышало 50 см, предпочтительно не превышало 30 см, более предпочтительно не превышало 20 см и еще более предпочтительно было равно нулю. Фактически при таком расстоянии d2 перемещение лестницы, необходимое для коррекции неровного расположения, оказывается невелико. Поэтому высотный подъемник 10 обладает высокой маневренностью, его легче и безопаснее использовать. Кроме того, благодаря малому расстоянию d2 удается уменьшить длину силовых цилиндров и их ход, что приводит к выигрышу в весе и к уменьшению количества необходимой рабочей жидкости.
Чтобы поднять лестницу 15, высотный подъемник 10 по данному изобретению включает два подъемных устройства, которые состоят из двух силовых цилиндров 22А, 22В, расположенных с обеих сторон каретки 18. Оба силовых цилиндра 22А, 22В зафиксированы на основании 12 и каретке 18. В рассматриваемом случае силовые цилиндры 22А, 22 В являются одинарными гидравлическими цилиндрами. В частности, здесь силовые цилиндры 22А, 22В закреплены на конце 18b каретки 18, противоположном концу 18а, и служат для подъема конца 18b каретки 18. Эти силовые цилиндры 22А, 22В закреплены на секции 14 с возможностью шарнирного поворота относительно оси, по существу перпендикулярной к плоскости Фиг.2.
Высотный подъемник 10 включает также управляющее устройство, позволяющее регулировать каждый из силовых цилиндров 22А, 22В автономно друг от друга. Первая реализация этого управляющего устройства 24 показана на Фиг.4. Как видно из Фиг.4, управляющее устройство 24 включает гидравлическую систему 26, приводящую в действие силовые цилиндры 22А, 22В, и электронное управляющее устройство 28. В управляющее устройство 24 подается рабочая жидкость, в обычном случае масло, из бака 30 посредством насоса 32, создающего циркуляцию рабочей жидкости в гидравлической системе 26. Гидравлическая система 26 имеет две одинаковых ветви 26А, 26В, каждая из которых связана с одним из двух силовых цилиндров 22А, 22В. Эти две ветви 26А, 26В располагаются параллельно за насосом 32. В каждой из ветвей 26А, 26В имеется соленоидный клапан 34А, 34В, управляемый электронным управляющим устройством 28. В рассматриваемом случае соленоидные клапаны 34А, 34В имеют четыре порта и три рабочих положения.
В первом положении 34А-1, 34 В-1 соленоидных клапанов 34А, 34В в камеры 36А, 36 В подъема силовых цилиндров 22А, 22В подается рабочая жидкость с помощью насоса 32, а камеры 38А, 38В опускания силовых цилиндров 22А, 22В находятся в состоянии жидкостного обмена с баком 30.
Во втором положении 34А-2, 34В-2 соленоидных клапанов 34А, 34В в камеры 38А, 38В опускания силовых цилиндров 22А, 22В подается рабочая жидкость с помощью насоса 32, а камеры 36А, 36В подъема силовых цилиндров 22А, 22В находятся в состоянии жидкостного обмена с баком 30.
Наконец, в третьем положении 34А-3, 34В-3 соленоидных клапанов 34А, 34В жидкостный обмен между баком 30 и, во-первых, камерами 36А, 36В подъема, а также, во-вторых, камерами 38А, 38В опускания прерывается.
Положением двух соленоидных клапанов 34А, 34В можно управлять независимо друг от друга. В частности, возможно управление, при котором один силовой цилиндр будет подниматься (что означает подачу рабочей жидкости в камеру подъема одного из силовых цилиндров), а другой силовой цилиндр будет опускаться (что означает подачу рабочей жидкости в камеру опускания другого силового цилиндра).
На Фиг.1 и 2 основание высотного подъемника 10 в рассматриваемом случае состоит из вращающейся станины 12, конструкция которой позволяет установить ее на опоре 26 с возможностью шарнирного поворота относительно пятой оси А5 (далее - «ось ориентации»), перпендикулярной к опоре 26. Это достигается за счет того, что вращающаяся станина 12 устанавливается на ориентационном выступе 28, зафиксированном на опоре 26. В описываемом случае опора 26 станины 12 установлена на транспортном средстве.
При этом транспортное средство 10 является грузовым автомобилем, хотя очевидно, что это может быть транспортное средство любого другого типа, например автомобиль повышенной проходимости или даже бесприводное транспортное средство, например автомобильный прицеп.
Работа высотного подъемника 10 согласно изобретению вытекает из только что представленного описания конструкции.
Так, высотный подъемник 10 имеет три степени свободы, позволяющие незакрепленному концу 20 лестницы 15 достичь любой точки в пространстве, расположенном от устройства 10 на расстоянии, меньшем, чем длина лестницы 15. Эти три степени свободы определяются:
- вращательным движением вращающейся станины 12 относительно оси А5 ориентации;
- движением подъема лестницы 15 при повороте относительно оси A3 подъема; и
- поступательным движением незакрепленного конца 20 подвижной лестницы 15 параллельно оси А1 лестницы 15; это движение в рассматриваемом случае возможно благодаря тому, что лестница 15 является телескопической.
Высотный подъемник 10 имеет дополнительную четвертую степень свободы благодаря тому, что каретка 18 может наклоняться относительно оси А2 коррекции неровного расположения.
Следовательно, чтобы достичь любой точки, оператор контролирует или регулирует поворот станины 12 относительно оси ориентации А5, подъем лестницы 15 за счет ее шарнирного вращения относительно оси A3 подъема и выдвижение лестницы 15. Эти три движения могут быть выполнены одновременно, последовательно или же последовательными сериями комбинированных движений.
Если же опора 26, на которой установлен ориентационный выступ 28, располагается не горизонтально, а, напротив, в той или иной степени неровно, эта неровность расположения может ощущаться в еще большей степени на лестнице 15. В этом случае лестница 15 может представлять источник опасности или даже оказаться не пригодной для использования.
Чтобы скорректировать неровное расположение, регулируя вместе с тем и положение лестницы 15, управляющее устройство 24 подает рабочую жидкость в силовые цилиндры независимо друг от друга, что позволяет наклонить лестницу 15 одновременно относительно оси A3 подъема и относительно оси А2 коррекции неровного расположения в целях коррекции ее неровного расположения.
В реализации управляющего устройства 24, показанной на Фиг.4, это достигается с помощью электронного управляющего устройства 28, на которое поступает следующая информация с соответствующих датчиков:
- угол b неровного расположения основания 12 по отношению к горизонтальной плоскости Рн, измеряемый в поперечной плоскости опоры высотного подъемника 10;
- угол d неровного расположения лестницы 15, измеряемый по отношению к горизонтальной плоскости Рн;
- угол с подъема лестницы 15, измеряемый между кареткой 18 или лестницей 15 и основанием 12, установленным на транспортном средстве;
- угол а уклона, измеряемый в продольной плоскости высотного подъемника между плоскостью Ps, на которую опирается транспортное средство, на котором установлено основание 12, и горизонтальной плоскостью Рн; и
- длины LA, LB частей штоков 44А, 44В каждого силового цилиндра 22А, 22В, которые выходят за пределы силового цилиндра, причем эти длины измеряются с помощью датчиков положения 46А, 46В.
Различные углы измеряются датчиками углов, которые хорошо известны специалистам в данной области техники.
Электронное управляющее устройство 28 получает также сигнал 1С от оператора, указывающий, что необходимо осуществить подъем или опускание и/или левый или правый поворот.
Используя эту информацию, в частности угол с подъема лестницы 15 и команду оператора 1С на ее подъем или опускание, электронное управляющее устройство 28 устанавливает контрольное значение LR длины выдвижения штоков поршней 44А, 44В силовых цилиндров 22А, 22В.
Однако это контрольное значение корректируется для каждого силового цилиндра, чтобы учитывать неровное расположение секции 15, причем в любой момент времени должны соблюдаться следующие соотношения:
LR=(LA+LB)/2
d=0.
В одной из предпочтительных реализаций коррекция контрольного значения моделируется в электронном управляющем устройстве в виде функции от углов а, b, с и контрольного значения длины LR.
Чтобы выполнять подаваемые в текущий момент команды, электронное управляющее устройство 18 попеременно или одновременно управляет соленоидными клапанами 34А, 34В, регулируя подачу рабочей жидкости в камеры 36А, 36В подъема и/или камеры 38А, 38В опускания одного силового цилиндра 22А, 22В независимо от другого силового цилиндра 22В, 22А.
Чтобы отрегулировать длину лестницы 15, достаточно отрегулировать выдвижение телескопических элементов лестницы 15.
Однако в случае высотного подъемника 10 для коррекции неровного расположения перемещаются только каретка 18 и лестница 15. Фактически ось А2 коррекции неровного расположения, относительно которой наклоняется лестница 15 для компенсации неровного расположения, находится рядом с осью А1 лестницы 15. Благодаря этому при коррекции неровного расположения используется меньшее угловое смещение лестницы 15. Поэтому данная коррекция неровного расположения проявляется в меньшем смещении, чем это было бы в случае, когда наклон лестницы 15 происходил бы относительно оси, расположенной дальше от ее собственной оси. Следовательно, и количество энергии, необходимой для коррекции неровного расположения, будет меньшим, чем в известном высотном подъемнике, где перемещается также основание. Кроме того, эта коррекция менее опасна, принимая во внимание меньшую амплитуду перемещения, необходимого для коррекции неровного расположения.
Далее, если лестница 15 может поворачиваться относительно каретки 18, движения лестницы могут представлять опасность. В этом случае требуются защитные меры, например дополнительная установка защитных гофрированных пластин между лестницей 15 и кареткой 18.
Однако в высотном подъемнике 10 лестница 15 жестко зафиксирована на каретке 18. Поэтому отсутствует какая-либо необходимость в установке защитных секций между лестницей 15 и кареткой 18. Поэтому высотный подъемник 10 более безопасен и дешевле в изготовлении.
Кроме того, лестница 15, жестко зафиксированная на каретке 18, более устойчива к деформациям скручивания.
Наконец, тот факт, что и для подъема лестницы 15, и для коррекции неровного расположения используются одни и те же одинарные силовые цилиндры, позволяет упростить гидравлическую систему, управляющую силовыми цилиндрами 22А, 22В. Таким образом, система может включать золотниковый гидрораспределитель с тремя позициями вместо четырех позиций в известном устройстве. При этом отпадает необходимость во множестве трубок и гибких шлангов гидросистемы, используемых в таких устройствах в настоящее время. Это позволяет уменьшить затраты на комплектующие и процесс сборки высотного подъемника по сравнению с известным устройством. Уменьшается также общая масса, не говоря уже о простом сокращении количества силовых цилиндров.
Разумеется, данное изобретение не ограничивается реализацией, которая была описана непосредственно выше в качестве примера. Возможны многочисленные модификации, не выходящие за рамки объема настоящего изобретения.
Так, различные движения могут быть выполнены как последовательно (то есть будут представлять собой набор следующих друг за другом движений), в любом порядке, так и одновременно (то есть в виде комбинированных движений) или же как комбинация последовательных и следующих за ними комбинированных движений.
Одна из альтернативных реализаций управляющего устройства 124 для каждого из силовых цилиндров показана на Фиг.5.
Как видно из Фиг.5, управляющее устройство 124 включает гидравлическую систему 126, приводящую в движение силовые цилиндры 22А, 22В, и электронное управляющее устройство 128. В управляющее устройство 124 подается рабочая жидкость из бака 130 посредством насоса 132, прокачивающего рабочую жидкость через гидравлическую систему 126. За насосом 132 гидравлическая система 126 включает соленоидный клапан 134, управляемый электронным управляющим устройством 128. В обсуждаемом случае соленоидный клапан 134 имеет четыре порта и три рабочих положения.
В первом положении 134-1 соленоидного клапана 134 в камеры 36А, 36В подъема силовых цилиндров 22А, 22В подается рабочая жидкость с помощью насоса 132, а камеры 38А, 38В опускания силовых цилиндров 22А, 22В находятся в состоянии жидкостного обмена с баком 130.
Во втором положении 134-2 соленоидного клапана 134 в камеры 38А, 38В опускания силовых цилиндров 22А, 22В подается рабочая жидкость с помощью насоса 132, а камеры 36А, 36В подъема силовых цилиндров 22А, 22В находятся в состоянии жидкостного обмена с баком 130.
Наконец, в третьем положении 134-3 соленоидного клапана 134 жидкостный обмен между баком 130 и камерами 36А, 36В подъема прерывается, тогда как камеры 38А, 38В опускания находятся в состоянии жидкостного обмена с баком 130.
За соленоидным клапаном 134 и перед камерами 36А, 36В подъема в гидравлической системе 126 установлен делитель потока 136. Этот делитель потока 136 обеспечивает подачу рабочей жидкости в камеры 36А, 36В подъема в равных количествах. Таким образом, количество рабочей жидкости, подаваемой в каждую из камер силового цилиндра 22А, 22В из делителя потока 136, в любой данный момент времени одинаково.
Далее, в гидравлической системе 126 между каждой из камер 36А, 36В подъема и делителем потока 136 установлены обратные клапаны 138А, 138В. В представленной здесь реализации управляющего устройства эти обратные клапаны 138А, 138В управляются избирательно, так чтобы обеспечить опорожнение камер 36А, 36В подъема, в частности, во время опускания силовых цилиндров 22А, 22В.
Управляющее устройство 124 в этой второй реализации включает также перекачивающее устройство 140 для избирательной передачи некоторого количества рабочей жидкости из одной из двух камер 36А, 36В подъема в другую камеру 36В, 36А подъема. Это перекачивающее устройство 140 работает по принципу насоса, который откачивает определенное количество рабочей жидкости из одной камеры 36А, 36В подъема и передает эту жидкость в другую камеру 36В, 36А подъема. Это перекачивающее устройство 140, как показано на Фиг.5, может приводиться в действие электрическим двигателем 142, который управляется электронным управляющим устройством 128.
В еще одной, не показанной на чертежах, реализации перекачивающее устройство может приводиться в действие гидравлическим двигателем, использующим рабочую жидкость, которая нагнетается из бака насосом. Подача рабочей жидкости в гидравлический двигатель в этом случае может управляться электронным управляющим устройством с помощью соленоидного клапана.
При такой альтернативной реализации управляющего устройства 124 электронному управляющему устройству 128 требуется только угол d неровного расположения, измеряемый, например, на ступеньке лестницы 15. В зависимости от знака и величины этого угла d неровного расположения электронное управляющее устройство 128 регулирует переток рабочей жидкости из одной из камер 36А, 36В подъема в другую камеру 36В, 36А подъема с помощью перекачивающего устройства 140, добиваясь коррекции неровного расположения, иначе говоря, достигая момента времени, когда будет получено d=0 (или, во всяком случае, такого момента, когда d не превышает предварительно заданное значение). Эта коррекция может быть выполнена вслед за выдвижением и размещением лестницы или, что более предпочтительно, одновременно с этими операциями.
Согласно еще одной, не показанной на чертежах, реализации высотного подъемника силовые цилиндры представляют собой спаренные силовые цилиндры. В этом случае первый цилиндр пары может использоваться, например, для подъема лестницы, а второй цилиндр пары, меньший по размеру, чем первый, может использоваться исключительно для коррекции неровного расположения. В этом случае две части спаренного силового цилиндра могут приводиться в движение от отдельных гидравлических систем.
Кроме этого, силовые цилиндры 22А, 22В, которые на Фиг.2 показаны параллельными, в альтернативном варианте могут быть расположены под углом относительно друг друга. Иначе говоря, расстояние между центрами силовых цилиндров 22А, 22В у каретки 18 или у лестницы 15 (в зависимости от того, к чему прикреплены силовые цилиндры) будет отличаться от (в частности, меньше) расстояния между центрами силовых цилиндров 22А, 22В у основания 12. Такая конфигурация обеспечивает бóльшую устойчивость высотного подъемника 10 и, в особенности, лестницы 15. Фактически в этом случае возникает составляющая силы, параллельная основанию, которая, в частности, предотвращает боковое отклонение лестницы 15.
Кроме того, в альтернативной реализации лестница может поворачиваться относительно каретки на оси коррекции неровного расположения. В этом случае подъемные устройства прикреплены к лестнице. Но и в этом случае расстояния d1 и d2, во-первых, между осью лестницы и осью коррекции неровного расположения и, во-вторых, между осью коррекции неровного расположения и осью подъема предпочтительно не выходят за пределы диапазонов, указанных выше, что обеспечивает близкое расположение этих осей.
В еще одной альтернативной реализации, в которой лестница жестко зафиксирована на каретке, а каретка установлена с возможностью шарнирного поворота относительно оси подъема на проставке, вставленной между секцией и основанием, проставка устанавливается на основании с возможностью шарнирного поворота относительно оси коррекции неровного расположения. В этой реализации при коррекции неровного расположения перемещается также проставка. В связи с этим данная реализация имеет несколько меньше преимуществ, чем та, которая была описана с обращением к Фиг.1 и Фиг.2. Однако и в этой реализации для коррекции неровного расположения секции используются подъемные устройства для этой секции, и расстояние между осью коррекции неровного расположения и осью лестницы (или, в общем случае, осью подвижной секции) также ограничено, что позволяет таким образом ограничить, во-первых, вес, который приходится перемещать для осуществления такой коррекции неровного расположения, и, во-вторых, величину перемещения лестницы, которое требуется для коррекции неровного расположения. Таким образом, даже в этой реализации целесообразно поддерживать расстояния d1, d2, во-первых, между осью лестницы и осью коррекции неровного расположения и, во-вторых, между осью коррекции неровного расположения и осью подъема в пределах диапазонов, указанных выше, чтобы обеспечить близкое расположение этих осей.
Как было показано в Фиг.1 и Фиг.2, подвижная секция 15 представляет собой лестницу. Однако в альтернативных реализациях высотного подъемника 10 эта секция может также представлять собой рычаг или стрелу, подходящую для того, чтобы нести на себе люльку (клеть, платформу), которая к тому же может выполнять поступательное движение относительно стрелы. Таким образом, преимущества данного изобретения могут проявиться в таких устройствах, как подъемники для мебели, для материалов, в автовышках и т.п.
Изобретение применимо также в качестве подъемного рычага наподобие описанного выше. Фактически коррекция неровного расположения люльки, которая крепится на последнем колене такого подъемного рычага, в известном случае осуществляется в месте соединения люльки и этого последнего колена. Однако изобретение позволяет скорректировать наклон люльки, корректируя наклон первого колена рычага, установленного на основании, через проставку, которая может шарнирно поворачиваться относительно двух перпендикулярных осей, обеспечивая, во-первых, подъем первого колена рычага и, во-вторых, коррекцию неровного расположения указанного первого колена.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРОВЕРКИ ГЕРМЕТИЧНОСТИ ГОЛОВКИ ЦИЛИНДРА | 2016 |
|
RU2692080C1 |
| СТЕНД ДЛЯ ПРАВКИ КУЗОВОВ ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 1998 |
|
RU2147475C1 |
| Мобильная буровая установка | 2016 |
|
RU2647522C2 |
| ПРИВОДНОЕ УСТРОЙСТВО И ТРАНСПОРТНОЕ СРЕДСТВО, НА КОТОРОМ ОНО ИСПОЛЬЗУЕТСЯ | 2010 |
|
RU2502001C2 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| РЕВЕРСИВНАЯ СИСТЕМА ВВОДА И ВЫВОДА ГАЗА ДЛЯ ВРАЩАТЕЛЬНЫХ МАШИН, РАБОТАЮЩИХ С ТЕКУЧЕЙ СРЕДОЙ | 2010 |
|
RU2544398C2 |
| УСТРОЙСТВА ДЛЯ ОБРАБОТКИ ДРЕВЕСНЫХ ВОЛОКОН | 2019 |
|
RU2754905C1 |
| ПОДЪЕМНАЯ СИСТЕМА ДЛЯ ОБСЛУЖИВАНИЯ ВЫСОТНЫХ СООРУЖЕНИЙ (ВАРИАНТЫ) | 2005 |
|
RU2355623C2 |
| ТРАНСПОРТЕР | 2013 |
|
RU2650173C2 |
| ПОДЪЕМНАЯ СИСТЕМА ДЛЯ ОБСЛУЖИВАНИЯ ВЫСОТНЫХ СООРУЖЕНИЙ БАШЕННОГО ТИПА | 2005 |
|
RU2351528C2 |

Высотный подъемник включает удлиненную секцию (14), в частности раздвижную лестницу или, как вариант, телескопическую стрелу, ориентированную по существу вдоль одной оси и приспособленную для установки подъемной клети, платформы или любой другой подобной опорной конструкции. Секция установлена на основании (12), причем между секцией (14) и основанием (12) вставлена проставка; секция установлена на проставке, установленной с возможностью шарнирного вращения относительно второй оси (А2) для коррекции неровного расположения секции, причем проставка установлена на основании (12) с возможностью шарнирного поворота относительно третьей оси (A3), обеспечивая подъем незакрепленного конца секции (14) относительно основания (12). На основании с возможностью шарнирного поворота установлены два силовых цилиндра (22А; 22В) для подъема и опускания секции; каждый из них управляется контроллером, и оба они могут одновременно осуществлять коррекцию неровного расположения во время подъема секции посредством соответствующего управления силовыми цилиндрами. Транспортное средство содержит указанный выше высотный подъемник. Изобретения обеспечивают компенсацию расположения транспортного средства и высотного подъемника на неровной поверхности. 2 н. и 14 з.п. ф-лы, 6 ил.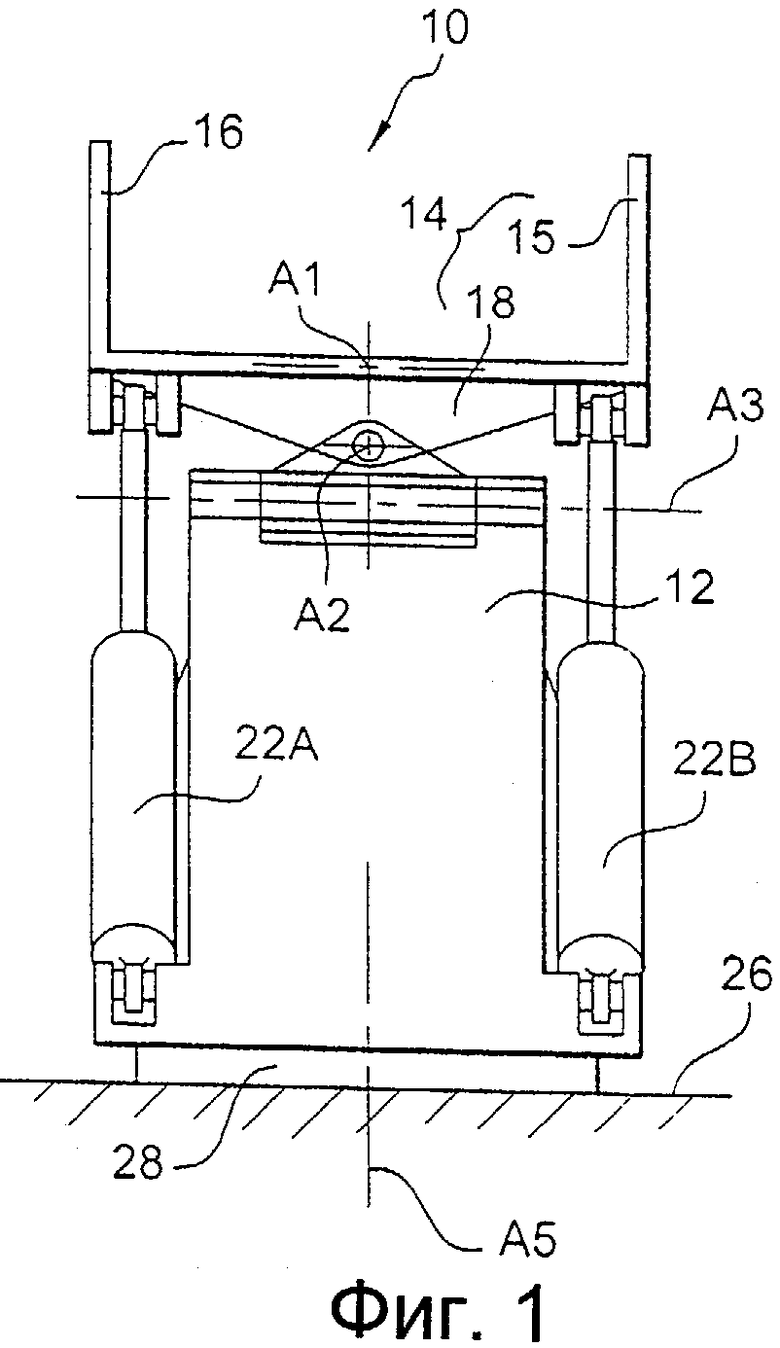
1. Высотный подъемник (10), содержащий:
- основание (12),
- секцию (14), которая ориентирована существенным образом вдоль первой оси (А1) и у которой незакрепленный конец (20) выполнен с возможностью подъема,
- проставку (19), расположенную между указанной секцией (14) и основанием (12), причем указанная секция (14) установлена на проставке (19) с возможностью поворота относительно второй оси (А2) для коррекции неровного расположения указанной секции (14), проставка (19) установлена на основании (12) с возможностью шарнирного поворота относительно третьей оси (A3), обеспечивая подъем указанного незакрепленного конца (20) указанной секции (14) относительно основания (12),
- два подъемных устройства (22А; 22 В) для указанной секции (14), которые шарнирно устанавливаются на указанном основании (12) и фиксируются на указанной секции (14) с обеих сторон от указанной первой оси (А1), причем каждое из двух подъемных устройств (22А, 22В) шарнирно установлено на указанной секции (14) и выполнено с возможностью взаимодействия с указанной секцией (14) для перемещения лица или предмета в более высокое положение;
- управляющее устройство (24; 124), обеспечивающее управление каждым из указанных подъемных устройств (22А; 22В) указанной секции (14).
2. Подъемник по п.1, отличающийся тем, что расстояние (d1) между второй осью (А2) и третьей осью (A3) не превышает 60 см и предпочтительно равно нулю, причем указанное расстояние (D1) измеряется вдоль четвертой оси (А4), находящейся в медиальной плоскости указанного высотного подъемника (10), перпендикулярной к указанной оси (А2) коррекции неровного расположения и пересекающей указанную ось (A3) подъема.
3. Подъемник по п.1, отличающийся тем, что расстояние (d2) между первой осью (А1) и второй осью (А2) не превышает 50 см, предпочтительно не превышает 30 см, более предпочтительно не превышает 20 см и еще более предпочтительно равно нулю, причем указанное расстояние (d2) измеряется по четвертой оси (А4), проходящей в медиальной плоскости устройства (10), перпендикулярной к оси (А2) коррекции неровного расположения и пересекающей ось (A3) подъема.
4. Подъемник по любому из пп.1-3, отличающийся тем, что указанная проставка представляет собой каретку (18), причем указанная секция (14) закреплена на каретке (18) с возможностью шарнирного поворота относительно второй оси (А2), каретка (18) закреплена на основании (12) с возможностью шарнирного поворота относительно третьей оси (A3).
5. Подъемник по любому из пп.1-3, отличающийся тем, что указанная секция (14) включает каретку (18).
6. Подъемник по п.5, отличающийся тем, что каждое из двух подъемных устройств (22А; 22В) шарнирно установлено на каретке (18).
7. Подъемник по любому из пп.1-3, отличающийся тем, что каждое из подъемных устройств (22А; 22В) указанной секции (14) является одинарным или спаренным силовым цилиндром.
8. Подъемник по любому из пп.1-3, отличающийся тем, что секция (14) включает лестницу (15) или стрелу.
9. Подъемник по любому из пп.1-3, отличающийся тем, что на секции (14) установлена люлька.
10. Подъемник по п.9, отличающийся тем, что люлька установлена с возможностью совершать поступательное движение по секции (14).
11. Подъемник по любому из пп.1-3, отличающийся тем, что расстояние между осями подъемных устройств (22А; 22В) у секции (14) или у каретки (18) отлично от расстояния между осями подъемных устройств (22А; 22В) у указанного основания (12).
12. Подъемник по любому из пп.1-3, отличающийся тем, что основание (12) включает вращающуюся станину (12), выполненную с возможностью установки ее на опоре (24) с возможностью шарнирного поворота относительно пятой оси (А5), перпендикулярной к опоре (24).
13. Подъемник по любому из пп.1-3, отличающийся тем, что подъемные устройства представляют собой силовые цилиндры (22А; 22 В), причем управляющее устройство (24) предназначено для получения информации (а, b, с) о горизонтальности указанного основания (12) и о высоте подъема секции (14) относительно основания (12) с возможностью после этого раздельно регулировать выдвижение штоков каждого из двух силовых цилиндров (22А; 22В) с целью коррекции неровного расположения подвижной секции (14).
14. Подъемник по любому из пп.1-3, отличающийся тем, что подъемные устройства представляют собой гидравлические силовые цилиндры, и управляющее устройство (124) предназначено для получения информации о неровном расположении указанной секции (14) с возможностью после этого регулировать перетекание рабочей жидкости из одного силового цилиндра (22А; 22В) в другой силовой цилиндр (22В; 22А) с целью коррекции неровного расположения подвижной секции (14).
15. Подъемник по любому из пп.1-3, отличающийся тем, что вторая ось (А2) параллельна первой оси (А1).
16. Транспортное средство, на котором установлен высотный подъемник (10) по любому из предшествующих пунктов.
| DE 19653376 A1, 25.06.1998 | |||
| Лесозаготовительная машина | 1983 |
|
SU1102525A1 |
| Устройство для контроля вращающихся объектов | 1986 |
|
SU1439652A1 |
| Мобильная машина с повышенными эксплуатационными свойствами | 2016 |
|
RU2631377C1 |
| Пожарная раздвижная лестница | 1979 |
|
SU806851A1 |

