Область техники, к которой относится изобретение
Настоящее изобретение относится к транспортеру для транспортировки большой полезной нагрузки по неровной поверхности грунта. Изобретение относится, в частности, к транспортеру для транспортировки полу-подвижного обрабатывающего оборудования от одного места расположения к другому, например, для использования в открытых горнорудных разработках, разработках карьеров и подобных работах.
Описание предшествующего уровня техники
Что касается широкого диапазона промышленных применений, включая, но никак не ограничиваясь применениями в открытых горнорудных разработках, разработках карьеров, часто существует требование использовать тяжелую установку или оборудование на первом рабочем месте в течение некоторого периода времени, которое затем требуется переместить в другое рабочее место. Если подобное оборудование или установка перемещаются только периодически, с наступающими длительными периодами статической работы, то, возможно, нет необходимости делать их полностью подвижными посредством выполнения встроенной транспортной системы. Вместо этого является обычным использование внешнего транспортера для перемещения оборудования как требуется и когда требуется.
Типичный транспортер может содержать несущее шасси или корпус, оборудованные соприкасающимся с грунтом транспортным средством, в обычном случае таким как пара гусеничных цепей, и имеющие несущее устройство, на котором может быть перевезена полезная нагрузка, содержащая подлежащие перемещению такое оборудование или установку.
При обычном режиме работы выполняют несущее устройство, которое может быть поднято и опущено. Например, оно может быть выполнено в виде несущей полезную нагрузку платформы с соответствующими средствами для ее подъема и опускания и, таким образом, подъема и опускания полезной нагрузки. В своей опущенной конфигурации транспортер может быть приведен в положение под оборудование, которое подлежит перемещению. Платформа или другое несущее устройство затем поднимают, чтобы удерживать подлежащее перемещению оборудование над грунтом, при этом транспортер приводится в действие, чтобы переместить оборудование. Несущая платформа может быть поднята, опущена и наклонена с помощью соответствующих телескопических валов, поршней или т.п.
Полезные нагрузки, перевозимые с помощью подобных транспортеров, обычно являются очень тяжелыми. Местность, по которой транспортируют полезные нагрузки, может быть неровной и включать в себя значительные неровности поверхности и уклоны. Полезную нагрузку необходимо беспрепятственно поднять с подобной неровной местности, чтобы транспортировать, но получающаяся в результате компоновка потенциально является очень тяжелой и неустойчивой. Безопасная и устойчивая опора полезной нагрузки во время подъема и транспортировки является существенной проблемой. В частности, если центр тяжести полезной нагрузки смещен от центра, то воздействие неровностей поверхности и уклонов грунта может быть чрезмерно усилено, создавая значительный крутящий момент на любых валах, поршнях и т.п., которые поднимают или опускают платформу. Операция поворота обычно бывает непрактичной. Вместо этого транспортеры могут выполнять статический поворот, или для них может потребоваться сбросить полезную нагрузку, переместиться и затем снова загрузить полезную нагрузку.
Сущность изобретения
В соответствии с изобретением, транспортер для транспортировки большой полезной нагрузки по неровной поверхности грунта содержит:
корпус;
соприкасающееся с грунтом транспортное средство, находящееся под корпусом и снабженное приводным средством для перемещения корпуса по поверхности грунта при эксплуатации;
несущий полезную нагрузку модуль, чтобы удерживать полезную нагрузку над корпусом при эксплуатации;
множество удлиненных телескопических подъемников, причем каждый из них имеет первое шарнирное соединение с корпусом на первом конце и второе шарнирное соединение с несущим полезную нагрузку модулем на втором конце;
в котором каждый из множества удлиненных телескопических подъемников выполнен с возможностью независимой работы, с тем чтобы позволить удлиненным телескопическим подъемникам вместе изменять и высоту и позицию полезной нагрузки относительно корпуса;
при этом по меньшей мере один из каждого первого или второго шарнирных соединений содержит ограниченное во вращении соединение, которое позволяет удлиненному телескопическому подъемнику поворачиваться относительно оси ортогональной к направлению его удлинения, но работает, чтобы ограничить и, например, предотвратить его вращение вокруг оси, параллельной направлению его удлинения.
Транспортер согласно настоящему изобретению предназначен, в частности, для использования с большой установкой или оборудованием, которые требуется время от времени перевозить по неровной поверхности грунта. Такое большое оборудование обычно не является самодвижущимся. Вместо этого, оно требует отдельного транспортера, на котором оно может быть установлено, поднято над поверхностью грунта для транспортировки и затем перемещено.
Необходимость поднять такую потенциально тяжелую полезную нагрузку до высоты, на которой она может быть транспортирована по существенно неровной и, возможно, наклонной территории, и в то же время уравновешивание устойчивым образом полезной нагрузки, представляет собой противоречивые требования к системе.
Изобретение решает эту проблему превосходным образом тем, что удлиненные телескопические подъемники являются средством, с помощью которого и поднимают полезную нагрузку, и с их помощью регулируют позицию полезной нагрузки, чтобы обеспечить ее уравновешивание. Подъемники расположены с возможностью выступа вверх из корпуса и приведения в действие, для того, чтобы выдвинуться и опереться на несущий полезную нагрузку модуль и позволить ему удерживать на себе полезную нагрузку при эксплуатации. Выдвижение опор подъемников на несущий полезную нагрузку модуль удерживает, поднимает и опускает полезную нагрузку. Дифференциальная работа подъемников изменяет позицию полезной нагрузки по отношению к горизонтали, в частности, путем наклона несущего полезную нагрузку модуля.
Особой проблемой, связанной с неровной местностью, является устойчивость, особенно если центр тяжести тяжелой полезной нагрузки может быть смещен от идеального. В частности, воздействие неровностей поверхности и уклонов грунта может быть усилено с передачей значительного крутящего момента на удлиненные телескопические подъемники, которые поднимают или опускают несущий полезную нагрузку модуль.
Транспортер по изобретению справляется с этим путем выполнения шарнирного соединения между каждым телескопическим подъемником и корпусом на первом конце и второго шарнирного соединения между каждым телескопическим подъемником и несущим полезную нагрузку модулем на втором конце, причем обеспечивая то, что на одном или на другом соединении между корпусом и удлиненными телескопическими подъемниками или несущим полезную нагрузку модулем и удлиненными телескопическими подъемниками (а по выбору - на обоих) шарнирное соединение является ограниченным во вращении соединением, которое выполнено с возможностью ограничения степени свободы вращения, разрешенной на соединении по меньшей мере до такой степени, чтобы предотвратить вращение вокруг оси, соответствующей направлению удлинения подъемника. Подъемник может наклоняться на этом соединении, но не может вращаться. Эта особенная комбинация дает системе лучшую возможность приспособиться к неровной местности, особенно, если центр тяжести тяжелой полезной нагрузки может быть смещен от идеального.
По меньшей мере один из каждого первого или каждого второго шарнирных соединений содержит ограниченное во вращении соединение, которое позволяет удлиненному телескопическому подъемнику поворачиваться относительно по меньшей мере одной оси, ортогональной направлению его удлинения, но работает с возможностью ограничения и, например, предотвращения его вращения вокруг оси, параллельной направлению его удлинения. Ограниченное во вращении соединение предпочтительно выполнено с возможностью обеспечения поворота удлиненного телескопического подъемника относительно пары осей, ортогональных направлению его удлинения, и, например, пары ортогональных осей, но с возможностью предотвращения его вращения вокруг оси, параллельной направлению его удлинения. Подъемник может, таким образом, наклоняться с полной свободой направления на этом соединении, но не может вращаться вокруг своей длины (или с альтернативной перспективы может позволить корпусу или несущему полезную нагрузку модулю, в зависимости от ситуации, шарнирно двигаться на нем, чтобы наклониться на нем в любом направлении, но не поворачиваться вокруг него).
Ограниченное во вращении соединение соответствующим образом сконфигурировано с возможностью предотвращения поворота удлиненного телескопического подъемника вокруг оси, параллельной направлению его удлинения, но с возможностью разрешения поворота удлиненного телескопического подъемника вокруг оси, перпендикулярной направлению его удлинения и, например, в предпочтительном случае, вокруг пары ортогональных осей направлению его удлинения, и при этом является универсальным шарниром.
Ограниченное во вращении соединение является, например, универсальным шарниром, содержащим пару одноосных универсальных модулей, смонтированных один над другим с ортогональными осями поворота, чтобы за счет того, что оно является таковым, позволять вращение вокруг упомянутой пары осей поворота, но не позволять вращение вокруг третьей оси перпендикулярной им.
По меньшей мере одно из шарнирных соединений является ограниченным во вращении, как описано. Другое шарнирное соединение может позволять три полных степени свободы вращения и может быть, например, шаровым шарниром. Однако ключ к изобретению заключается в том, что по меньшей мере одно из соединений не является шаровым соединением и не позволяет вращение подъемника и, таким образом, сопротивляется крутящим нагрузкам, возникающим из-за дисбаланса находящегося вдали от идеального состояния полезной нагрузки.
Поэтому в подобном случае соответствующим образом каждое одно из первого или, в альтернативном варианте, каждое одно из второго шарнирных соединений является ограниченным во вращении соединением, причем каждое одно из другого соединения соответствующим образом сконфигурировано с возможностью разрешения трех полных степеней свободы вращения. Наиболее пригодно, каждое из первых шарнирных соединений между корпусом и первым концом удлиненного телескопического подъемника является ограниченным во вращении соединением, таким как универсальный шарнир, как описано выше. Таким образом, подъемник может наклоняться на этом соединении и, в предпочтительном случае, может наклоняться с двумя степенями свободы вокруг двух ортогональных осей в плоскости, параллельной плоскости корпуса, но не может вращаться вокруг своей длинной оси. Каждое второе шарнирное соединение между несущим полезную нагрузку модулем и вторым концом удлиненного телескопического подъемника может быть сконфигурировано с возможностью обеспечения трех полных степеней свободы вращения, и может быть, например, шаровым соединением.
Такая комбинация позволяет системе лучше приспосабливаться к неровной местности, особенно, если центр тяжести тяжелой полезной нагрузки может быть смещен от идеального, поскольку не только длина каждого телескопического подъемника является независимо изменяемой, но также его сочленение является независимо изменяемым, на самом деле, чтобы независимо изменить фактическую позицию корпуса и/или несущего модуля относительно телескопического подъемника в каждом соединении. Сочетание независимо телескопических подъемников с шарнирными соединениями, сконфигурированными с возможностью ограничения во вращении, чтобы предотвращать вращение удлиненного телескопического подъемника вокруг оси, параллельной направлению его удлинения, и чтобы позволять поворот удлиненного телескопического подъемника вокруг оси, перпендикулярной направлению его удлинения, и, в частности, выполнение универсального шарнира для этой задачи, как описано выше, дает особенно эффективный баланс между потребностью в устойчивости, что касается несущей платформы, как опоры нагрузки и транспортного блока, и потребностью в многочисленных степенях свободы сочленения, чтобы приспособиться к неровной местности и контролировать позицию несущей платформы.
В предпочтительном случае каждый подъемник имеет датчик нагрузки, связанный с общим центральным модулем управления, при этом общий центральный модуль управления выполнен с возможностью определения, исходя из относительной нагрузки на каждый подъемник, местоположения центра тяжести полезной нагрузки. Выполнение датчиков нагрузки внутри системы подъемников позволяет самим подъемникам быть средством, информация с которого о балансе полезной нагрузки возвращается на центральный блок управления, так что баланс может быть на самом деле самоотносимым, при этом нагрузка может быть и поднята, и устойчиво удерживаться с помощью единственного устройства.
Изобретение в данном варианте осуществления настоящего изобретения предлагает удивительно простую систему, в которой несущий полезную нагрузку модуль выполнен и с возможностью поднятия нагрузки, следовательно, позволяя транспортировать нагрузку по неровной местности, и с возможностью удержания нагрузки, сбалансированной посредством самоотносимого наклоняющего механизма.
Удлиненные телескопические подъемники расположены с возможностью выступа вверх от нижнего шарнирного соединения, вошедшего в зацепление с корпусом, до верхнего шарнирного соединения с несущим полезную нагрузку модулем, выполненные с возможностью опоры на полезную нагрузку, чтобы поддерживать ее и поднимать при эксплуатации. Несущий полезную нагрузку модуль может поддерживать и поднимать полезную нагрузку непосредственно или опосредованно. Например, несущий полезную нагрузку модуль может содержать несущую полезную нагрузку платформу. В подобном варианте осуществления настоящего изобретения каждый удлиненный телескопический подъемник проходит между корпусом и несущей полезную нагрузку платформой и выполнен с возможностью приведения в действие, чтобы поднимать и опускать несущую платформу при эксплуатации и посредством этого поднимать и опускать на нее полезную нагрузку.
В данном варианте осуществления настоящего изобретения можно видеть, что удлиненные телескопические подъемники являются средством, с помощью которого несущую полезную нагрузку платформу и поднимают, и с помощью которого позицию несущей полезную нагрузку платформы регулируют, чтобы обеспечить динамический баланс полезной нагрузки. Выдвижение подъемников, действующих на несущую полезную нагрузку платформу, поднимает несущую полезную нагрузку платформу. Дифференциальная работа подъемников оказывает наклонное действие на несущую полезную нагрузку платформу. Ограниченные во вращении соединения выдерживают крутящие нагрузки, приписываемые внецентровым полезным нагрузкам, поскольку позиция несущей полезную нагрузку платформы изменяется с изменением наклонной местности и/или поскольку несущая полезную нагрузку платформа наклоняется.
Включение датчиков нагрузки в качестве интегральной составной части каждого приводного средства означает, что система может быть до некоторой степени самоотносимой, при этом несущая платформа, на которой располагается полезная нагрузка, может быть наклонена с помощью дифференциальной работы различных исполнительных механизмов для того, чтобы сохранить центр тяжести полезной нагрузки в устойчивом положении.
При обычной эксплуатации транспортер в соответствии с настоящим изобретением будет иметь два особых режима: режим движения и режим подъема. При режиме движения транспортер перемещается по поверхности грунта (с полезной нагрузкой или без нее). Это осуществляется с помощью соприкасающегося с грунтом транспортного средства, на котором установлены корпус транспортера, и, следовательно, полезная нагрузка, если имеется. Соответствующие приводные средства выполнены с возможностью осуществлять работу соприкасающегося с грунтом транспортного средства в режиме движения, чтобы заставить транспортер продвигаться по грунту вперед.
Во втором режиме работы транспортер работает в режиме подъема. Обычно транспортер будет приводиться в движение под полезной нагрузкой. Удлиненные телескопические подъемники будут выдвинуты, например, по очереди, чтобы войти в зацепление с нагрузкой. В соответствующем режиме работы подъемники могут выдвигаться последовательно до тех пор, пока каждый не получит равную заданную активную нагрузку. Если все подъемники находятся в нагруженном положении, подъемники могут выдвигаться, чтобы поднимать несущий полезную нагрузку модуль и, таким образом, поднимать полезную нагрузку.
Каждый подъемник выполнен с возможностью работы в режиме подъема, чтобы выдвигаться в длину и таким образом принимать свою долю участия в роли поднятия и удержания полезной нагрузки. Каждый подъемник участвует в поднятии общего несущего полезную нагрузку модуля, такого как несущая полезную нагрузку платформа. Исполнительные механизмы выполнены с возможностью независимой работы, чтобы позволить им изменять позицию несущего полезную нагрузку модуля в то же самое время, когда полезная нагрузка поднимается до соответствующей для транспортировки высоты, обеспечивая устойчивую работу в режиме подъема, и подобным образом осуществлять динамическую коррекцию в ответ на кратковременные изменения центра тяжести полезной нагрузки, поскольку транспортер перемещается по неровной местности, чтобы удерживать безопасный баланс полезной нагрузки.
Датчики нагрузки будут возвращать информацию на центральную систему управления, чтобы обеспечить и динамический мониторинг и/или поддержание центра тяжести, как только система поднимает полезную нагрузку, чтобы удержать полезную нагрузку в безопасных эксплуатационных параметрах и впоследствии, как только полезная нагрузка транспортируется по потенциально неровной местности.
Подъемник соответствующим образом содержит силовой цилиндр, поршень или т.п., выдвигающие несущую нагрузку структуру, и он является, например, приводным гидравлическим силовым цилиндром или поршнем.
Соответствующим образом выполнена группа, состоящая, например, по меньшей мере из трех подъемников и, в особенно предпочтительном случае, из четырех подъемников. Каждый подъемник снабжен на вершине воображаемым многоугольником, который предпочтительно центрирован на воображаемом более устойчивом положении центра тяжести полезной нагрузки или по направлению к нему. Например, группа подъемников центрирована воображаемым образом в центре несущей полезную нагрузку платформы или по направлению к этому центру. Воображаемый многоугольник, образованный группой подъемников, предпочтительно представляет собой правильный многоугольник и является, например, квадратом. Каждый подъемник в группе может быть идентичным.
В обычном режиме работы безопасная рабочая конфигурация могла бы быть определена, например, путем определения по меньшей мере одного воображаемого круга вокруг определенной выше центральной точки, которая представляет устойчивое целевое расположение для центра тяжести полезной нагрузки. Включение датчиков нагрузки в каждое подъемное средство означает, что сами подъемники могут обеспечивать постоянную и динамическую обратную связь центра тяжести, когда он перемещается от этой безопасной цели. Например, это могло бы быть показано оператору на соответствующем дисплейном средстве и/или возвращено в автоматическую систему управления, которая могла бы осуществлять динамическую коррекцию позиции полезной нагрузки, чтобы перевести центр тяжести назад в направлении более устойчивого положения во время эксплуатации. Средство управления может сработать, чтобы отключить работу приводного средства, если находится в небезопасной конфигурации.
Система сигнализации может быть выполнена с возможностью выдачи указания о небезопасной или неустойчивой конфигурации, например, как описано выше. Дополнительно или в альтернативном варианте средство управления может быть установлено, чтобы препятствовать работе или предотвращать работу транспортера или некоторых его функций в небезопасной или неустойчивой конфигурации, например, как описано выше.
В предпочтительном варианте осуществления настоящего изобретения транспортер предпочтительно также выполнен для операции поворота (то есть для вращения вокруг вертикальной оси/оси, перпендикулярной плоскости несущего полезную нагрузку модуля). Например, такая как несущая полезную нагрузку плита может состоять из двух частей - с нижним несущим участком, находящимся в зацеплении и наклоняемыми телескопическими подъемниками, и верхним участком, на котором полезная нагрузка удерживается при эксплуатации с возможностью вращения относительно нижнего участка. Это дает вращение вокруг вертикальной оси или поворотное действие в дополнение к действиям по подъему и наклону, и придает транспортеру особую универсальность при эксплуатации. Однако это поворотное действие может управляться, например, с помощью соответствующей зубчатой передачи и может быть распознано от неконтролируемого вращения вокруг удлиненного подъемника, предотвращать которое специально предусмотрено изобретением.
Особое преимущество транспортера по настоящему изобретению заключается в том, что дополнительная устойчивость описанной конструкции облегчает адаптацию к такой поворотной операции. Недостаток транспортеров по предшествующему уровню техники с эквивалентной в целом задачей заключается в том, что подобная поворотная операция обычно является непрактичной. Подобные транспортеры взамен могут выполнять, например, статический поворот, сбрасывать полезную нагрузку, перемещаться и затем вновь загружать полезную нагрузку.
В качестве дополнительного преимущества транспортер в соответствии с настоящим изобретением превосходно подходит для удаленной работы через соответствующее средство дистанционного управления. Он не требует работы привода посредством кабины, являющейся интегральной частью транспортера. В особенно предпочтительном варианте осуществления настоящего изобретения транспортер включает в себя центральный блок управления, выполненный с возможностью сообщения с управляемым пользователем дистанционным средством управления.
Для наземной транспортировки в режиме движения транспортер включает в себя соответствующую наземную приводную систему, включающую в себя соприкасающееся с грунтом транспортное средство, которое удерживает над грунтом корпус и, следовательно, полезную нагрузку, в случае ее наличия. Соответствующий наземный привод может включать в себя, например, разнесенную в поперечном направлении пару соприкасающихся с грунтом катящихся приводов с любой стороны центрального корпуса, которые могут быть, например, в виде колес, бесконечных гусеничных цепей и т.д. В особенно предпочтительном варианте осуществления настоящего изобретения пара гусеничных цепей, расположенных в поперечном направлении с каждой стороны центрального корпуса, возможно, является предпочтительной, поскольку придает низкий профиль и наиболее эффективную тягу на сложной местности.
Следует понимать, что если в данном случае сделана ссылка на составные части изобретения или на направления, которые являются горизонтальными или вертикальными, или на являющиеся прямыми углы, то это сделано только для удобства понимания относительной геометрии и сделано со ссылкой на нейтрально загруженное состояние на плоском грунте, при котором горизонтальный корпус и горизонтальный несущий модуль имеют между собой перпендикулярно выдвигающиеся подъемники. Но за этим не должно подразумеваться ограничение общего принципа. Из ранее изложенного будет понятно, что конкретная задача изобретения - приспособить другие конфигурации при эксплуатации в конкретных случаях, когда грунт не является плоским, и/или транспортер не загружен нейтрально, и/или подъемники находятся под углом к перпендикуляру и/или несущий модуль наклонен от горизонтали.
Краткое описание чертежей
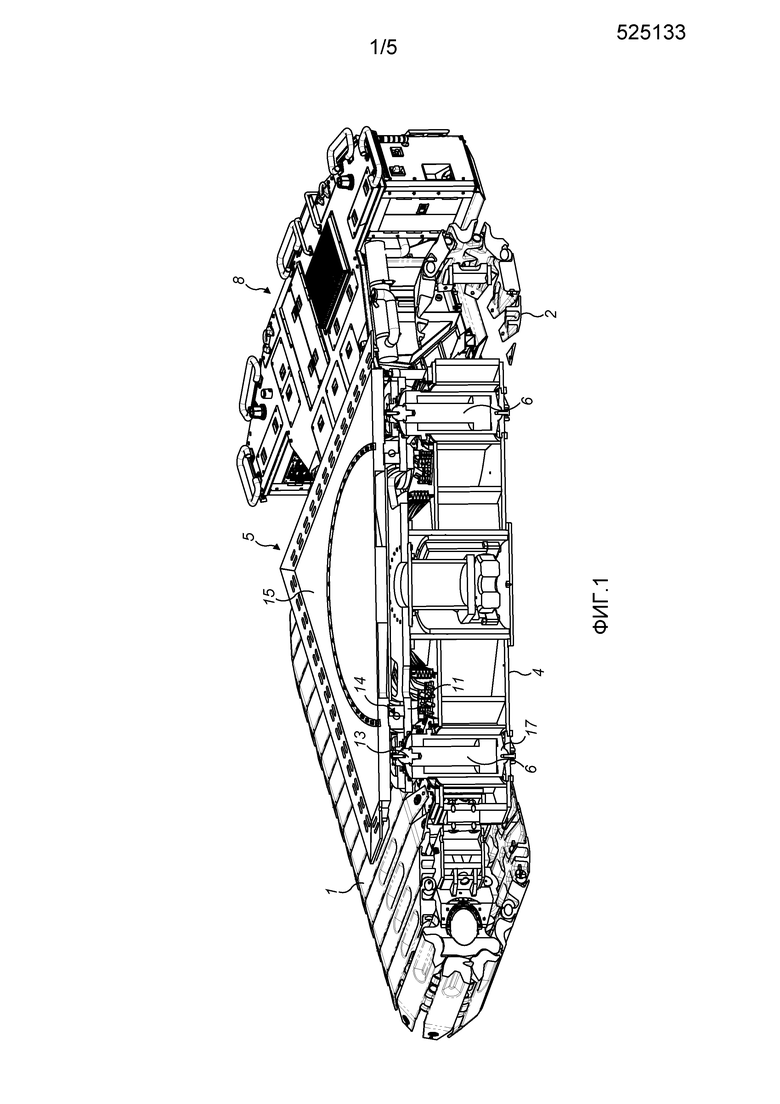
Фигура 1 представляет собой вид в перспективе половины выреза транспортера по варианту осуществления настоящего изобретения;
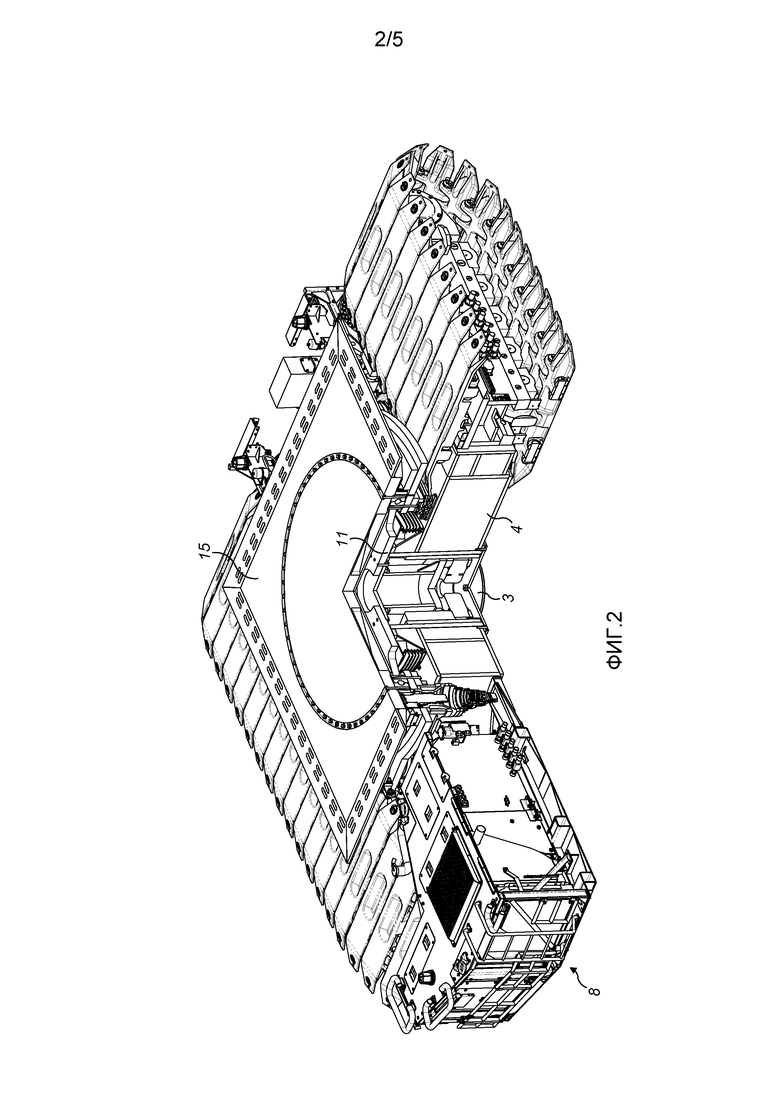
Фигура 2 представляет собой подобный вид с альтернативным вырезом;
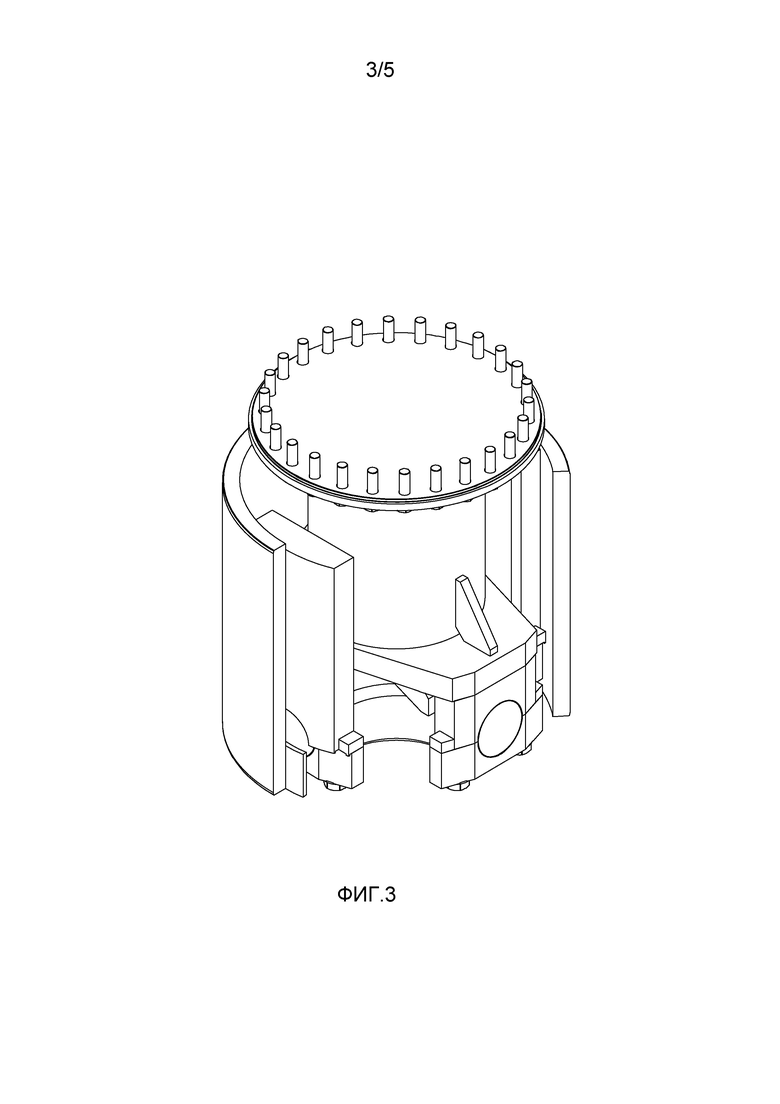
Фигура 3 представляет собой вид в перспективе универсального шарнира, выполненного на основе одного из приводных поршней, показанного внутри его корпуса;
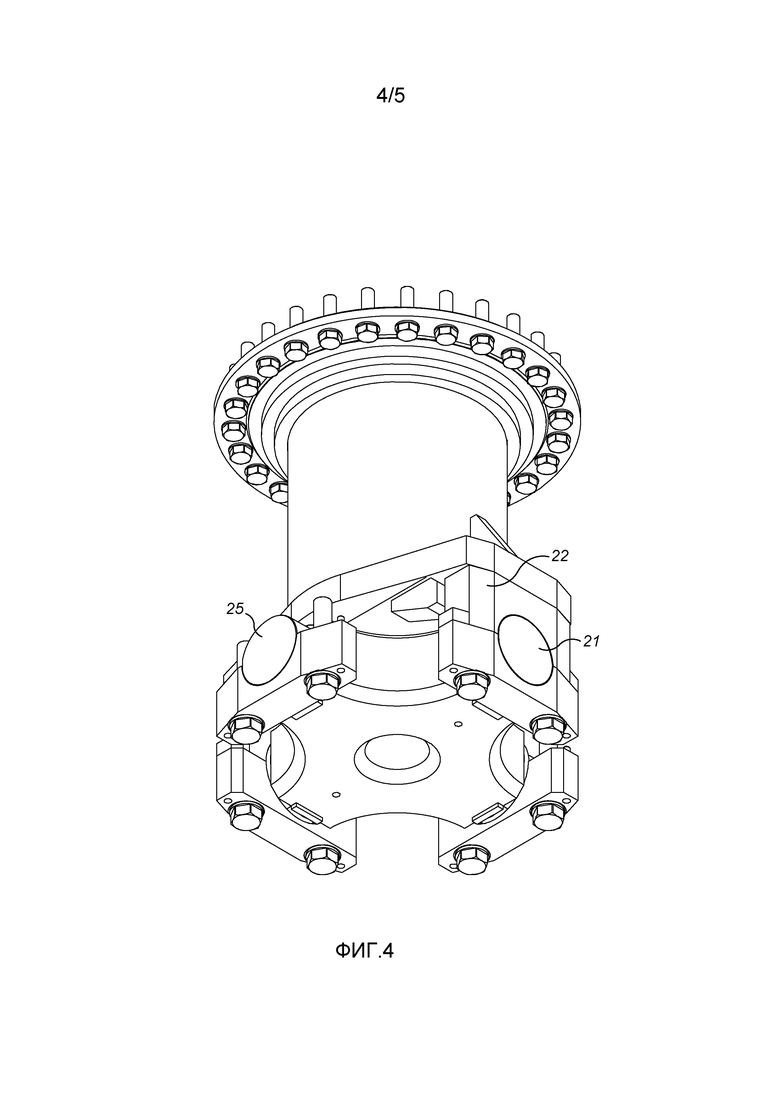
Фигура 4 представляет собой вид универсального шарнира без корпуса;
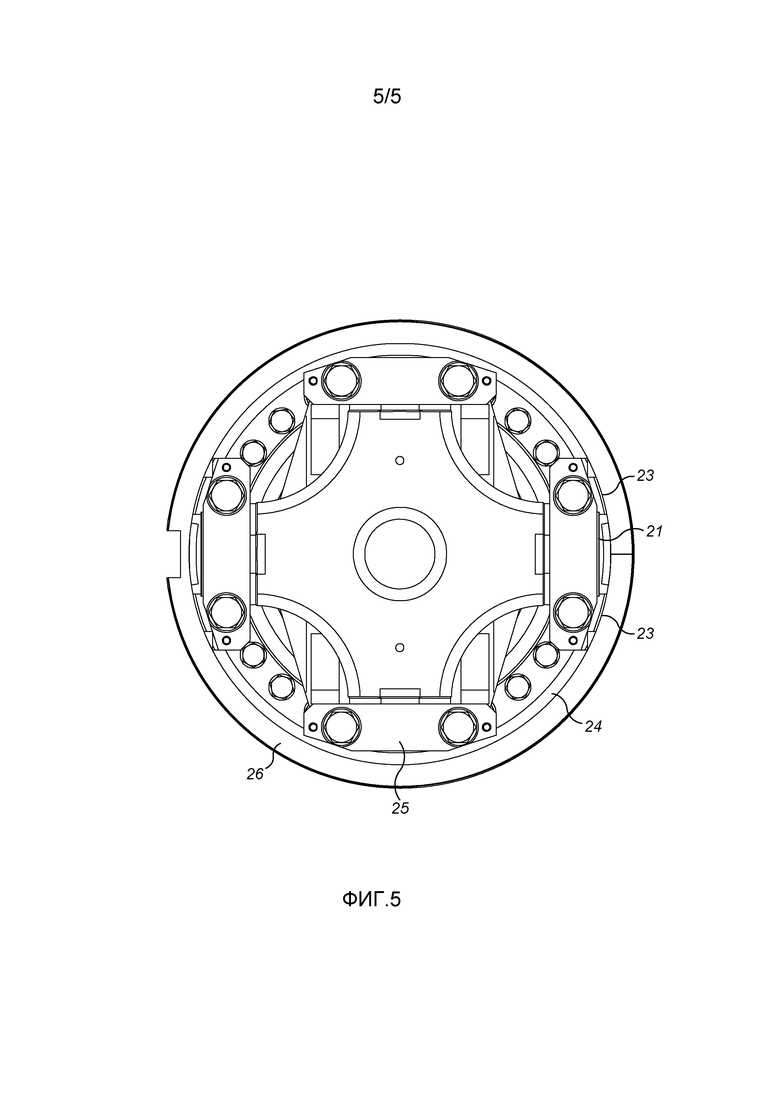
Фигура 5 представляет собой вид снизу универсального шарнира.
Подробное описание проиллюстрированного варианта осуществления изобретения
В приведенном в качестве примера варианте осуществления настоящего изобретения, показанного на фигурах 1 и 2, транспортер включает в себя пару узлов (1,2) гусеничных цепей, расположенных в поперечном направлении с каждой стороны узла (4) кузова транспортера. Узел (3) центральной направляющей несет узел (5) несущей платформы. Четыре подъемных гидравлических цилиндра (6) занимают каждый угол кузова в виде квадратной группы. Каждый поднимающий гидравлический цилиндр снабжен динамометрическим датчиком для обнаружения нагрузки на поднимающий цилиндр и возвращает эту информацию на центральный блок управления. Двигатель и узел (8) гидравлического силового блока приводят в действие гусеницы в режиме движения.
Подъемный механизм показан наиболее понятно со ссылкой на фигуру 1. На фигуре 1 можно видеть в разрезе пару подъемных гидравлических цилиндров (6). Каждый гидравлический подъемный цилиндр выдвигается, чтобы опираться на нижнюю плиту (11) узла несущей платформы. Сферическое соединение (13) на вершине цилиндра (6) создает шарнирное соединение между цилиндром (6) и нижней плитой (11). Нижняя плита (11) соединена с верхней плитой (15), на которой при эксплуатации непосредственно находится полезная нагрузка. Относительный поворот между двумя плитами (11,15) обеспечивается соединением (14). Таким образом, поворотное действие может быть контролируемым образом осуществлено верхней плитой (15) и, следовательно, удерживаемой нагрузкой, и без наложения на цилиндр (6) чрезмерных крутящих напряжений или т.п.
Дифференциальная работа каждого цилиндра (6) и выполнение шарнирных соединений (13) между вершинами цилиндров и узлом (5) несущей платформы, и дополнительных шарнирных соединений (17) между основанием цилиндров и корпусом (4), вместе взаимодействуют так, что цилиндры при эксплуатации могут и поднимать, и наклонять платформу, поднимая полезную нагрузку, одновременно обеспечивая то, что она остается устойчивой и сбалансированной, если встречается неровная и/или наклонная местность.
Как было пояснено выше, поддержание устойчивого баланса для полезной нагрузки и, в особенности, выдерживание напряжений, которые возникают из-за нецентрированной полезной нагрузки, особенно при пересечении грунта с неровной или наклонной поверхностью, является известной проблемой в отношении транспортеров. Особая проблема возникает, когда нецентрированная нагрузка транспортируется по наклонной плоскости, поскольку это будет иметь тенденцию вызывать крутящие напряжения на цилиндрах (6). Чтобы противостоять этим крутящим напряжениям и, в частности, сопротивляться любой тенденции цилиндров вращаться, нижние соединения (17), посредством которых цилиндры создают шарнирное зацепление с корпусом (4), являются соединениями универсального типа, показанного очень подробно на фигурах 3-5, который позволяет две степени свободы наклона, но не позволяет вращение вокруг продольной оси цилиндра (6).
Компоновка обеспечивает на самом деле пару универсальных шарниров с ортогональными осями поворота, причем каждый шарнир состоит из пары размещенных в корпусе роликов.
Этот пример шарнирного соединения универсального типа показан очень подробно на фигурах 3-5, причем на фигуре 3 проиллюстрирован вид в перспективе универсального соединения, выполненного на основе одного из приводных поршней, показанных внутри частично вырезанного корпуса двойного цилиндра, на фигуре 4 показан вид в перспективе снизу универсального соединения без корпуса, и на фигуре 5 показан вид снизу.
В проиллюстрированном примере соединения первая пара размещенных в корпусе роликов (21), каждый из которых имеет корпус, стороны (22) которого приварены в четырех точках (23), как показано на фигуре 5, к первому цилиндру корпуса (24). Вторая пара размещенных в корпусе роликов (25) может свободно вращаться. Первый цилиндр (24) корпуса садится внутри второго цилиндра (26) корпуса. Два цилиндра корпуса выполнены с возможностью относительного скольжения. Силовой цилиндр может наклоняться на этом соединении с двумя степенями свободы вокруг двух ортогональных осей в плоскости, параллельной плоскости корпуса, но не может вращаться вокруг своей длинной оси. Эта компоновка превосходным образом достигает цели полной свободы наклона вокруг двух ортогональных осей без свободы вращения. Таким образом, она сопротивляется крутящим нагрузкам, возникающим из дисбаланса полезной нагрузки в состоянии, далеком от идеального.
Транспортер превосходно подходит для удаленной работы через соответствующее средство дистанционного управления. Он не требует работы водителя в кузове, выполненном как интегральная часть транспортера. В описанном варианте осуществления настоящего изобретения транспортер включает в себя центральный блок управления (не показан), управляемый дистанционным средством управления, управляемым пользователем по дистанционному блоку радиоинтерфейса.
Возможный способ работы описан ниже с помощью примера. Приведенный в качестве примера способ работы представляет собой способ удаленной работы через соответствующее средство дистанционного управления.
Будет понятно, что это только пример рабочего режима для приведенного в качестве примера варианта осуществления транспортера. Приведенный в качестве примера вариант осуществления транспортера не ограничивается работой в соответствии с подобными принципами, и изобретение в целом не ограничено таким образом. И вариант осуществления устройства, и способ работы даны в иллюстративных целях.
В соответствии с приведенным в качестве примера способом работы, предложены три основных рабочих режима. В данном случае речь идет о режиме движения, режиме подъема и режиме поворота. В примере одновременно может быть выбран для работы только один режим. Выбор между каждым режимом осуществляется с помощью многопозиционного переключателя, смонтированного на удаленном блоке радиоинтерфейса.
Режим движения используется для перемещения транспортера без полезной нагрузки. Если выбран режим движения, средства управления, такие как рукоятки, смонтированные на дистанционном радиоуправлении, могут быть использованы, чтобы независимо управлять гусеницами транспортера.
Рассмотренный соответствующий дополнительный режим работы для каждой гусеницы обеспечивает функцию «поворота». При работе правая и левая гусеницы будут двигаться в противоположных направлениях при автоматически совпадающей скорости, обеспечивая наиболее возможный компактный поворотный круг. Предусмотрено, что поворотная функция будет доступна только от дистанционного средства управления, когда транспортер полностью остановлен.
Как только транспортер находится в правильном положении, тогда может быть выбран режим подъема, и затем может быть осуществлена попытка поднять полезную нагрузку. Обычный подъем может состоять из трех этапов, причем первый этап является подготовкой полезной нагрузки, второй этап является центрированием полезной нагрузки, и третий этап является подъемом полезной нагрузки для транспортировки.
В зависимости от обстоятельств существуют различные возможные способы подготовки полезной нагрузки для подъема. Полезная нагрузка может быть помещена любым соответствующим образом, например, непосредственно на верхний стол, опосредованно посредством подъемной рамы или другим образом, не выходя за рамки принципов изобретения.
Перед тем, как будет сделана любая попытка поднять полезную нагрузку, должен быть известен теоретический центр тяжести полезной нагрузки. Неудачная попытка расположить транспортер в месте расположения центра тяжести может привести в результате к неудачной попытке подъема.
В возможном режиме работы, при выборе режима подъема, оператору может потребоваться нажать и удерживать кнопку фиксатора рукоятки управления, для того, чтобы система начала автоматическое центрирование с полезной нагрузкой. Управляя кнопкой фиксатора рукоятки, соответствующее программное обеспечение управления будет автоматически поднимать подъемное устройство до тех пор, пока не будет контакта с полезной нагрузкой. Соответствующим образом, подъемные гидравлические цилиндры могут последовательно или постепенно войти в зацепление с грузом.
Например, первый подъемный гидравлический цилиндр может взять груз первым. Когда динамометрический датчик на первом подъемном гидравлическом цилиндре увидит заданную активную нагрузку, тогда этот цилиндр остановится. Как только первый цилиндр осуществил такой контакт с нагрузкой, следующая пара соседних цилиндров будет выдвигаться далее до тех пор, пока цилиндры не увидят равную, заданную активную нагрузку, совпадающую с нагрузкой первого цилиндра. Наконец, оставшийся цилиндр будет продолжать подъем до тех пора, пока все четыре цилиндра не увидят равную, заданную активную нагрузку. Заданная нагрузка будет ограничена, чтобы обеспечить то, что полезная нагрузка не будет поднята, пока выполнение 2 этапа фазы подъема не будет подтверждено оператором.
Когда все цилиндры находятся в заданном положении, динамометрические датчики могут вернуть свою информацию назад к центральной системе управления. Это позволит определить положение центра тяжести, и результаты будут показаны на дисплее пользователя дистанционного средства управления. Оператор сможет четко увидеть приблизительное положение центра тяжести на дистанционном радиоинтерфейсе по отношению к фактической безопасной рабочей зоне.
Если в любое время во время этого этапа возникнет проблема и сработает сигнализация, тогда подъемные цилиндры должны будут вернуться к своему исходному положению до тех пор, пока источник тревоги не будет установлен.
По завершении любое крепление между верхним столом и полезной нагрузкой должно быть сделано быстро, до того, как может начаться следующий этап. Как только устройство правильным образом центрировано, полезная нагрузка закреплена, и центр тяжести находится в пределах безопасных параметров, может начаться подъем. Предусмотрено, что это может быть выполнено автоматически.
При выполнении этапа автоматического подъема цилиндры будут выдвигаться с одной и той же скоростью до заданной высоты, чтобы обеспечить равномерный подъем полезной нагрузки, и чтобы центр тяжести оставался устойчивым. Во время этой операции, если границы диапазона центра тяжести были превышены, тогда система может подать звуковое и/или визуальное предупреждение, которое должно быть услышано, и/или для того, чтобы подъем был запрещен. Цилиндры могут, например, вернуться к их исходному месторасположению, позволяя оператору оценить ситуацию перед тем, как предпринять попытку любой дальнейшей операции.
Когда полезная нагрузка была успешно поднята до заданной высоты и все остается в пределах допустимых рабочих параметров, тогда завершается стадия автоматического подъема, и управление возвращается к оператору.
Как только управление было возвращено оператору, ответственностью оператора становится регулировка соответствующей полезной нагрузки для транспортировки к новому месту расположения. Дистанционное радиоустройство управления может соответствующим образом содержать в себе различные рукоятки, чтобы позволить оператору осуществлять различные команды, связанные со всей функциональностью транспортера.
Режим движения используется также для движения транспортера с полезной нагрузкой. Системы управления могут обеспечить то, что после завершения режима подъема транспортеру будет разрешено перейти на режим движения, если центр тяжести находится в безопасных границах. Устройства управления, такие как рукоятки, смонтированные на дистанционном радиоустройстве управления, могут быть использованы, чтобы независимо управлять гусеницами транспортера. Например, может существовать рукоятка для управления каждой гусеницей индивидуально; при движении по прямой линии обе рукоятки будут продвинуты вперед, и гусеницы будут поворачиваться на скорости, пропорциональной перемещению каждой рукоятки. Например, толкание левой рукоятки дальше, чем правой рукоятки, будет приводить в результате к повороту направо, одновременно продвигаясь вперед. Чем больше расхождение между двумя рукоятками, тем компактнее круг поворота.
Пока транспортер ползет, система обеспечивает постоянный мониторинг центра тяжести, который может быть показан на дисплее дистанционного радиоинтерфейса. В том случае, если активировано условие ошибочной сигнализации, работа машины может быть прекращена.
Обычно в целях безопасности подъем, опускание или поворот не разрешаются и будут запрещены, пока транспортер ползет. Для того, чтобы отрегулировать положение полезной нагрузки, должны быть начаты режим подъема или режим поворота. В примере рабочего режима это может быть достигнуто только путем приведения транспортера к полной остановке, и затем выбору требуемого рабочего режима.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО, ИНВАЛИДНАЯ КОЛЯСКА И ГУСЕНИЦА, ИСПОЛЬЗУЕМАЯ В ТРАНСПОРТИРУЮЩЕМ УСТРОЙСТВЕ | 1998 |
|
RU2215664C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2808673C2 |
| СЕКЦИОННЫЙ ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ ЧЕРЕЗ ПРОСТРАНСТВА С ПРЕПЯТСТВИЯМИ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТРАНСПОРТИРОВКИ СЫПУЧИХ МАТЕРИАЛОВ | 2015 |
|
RU2602156C2 |
| ВЫСОТНЫЙ ПОДЪЕМНИК И ОБОРУДОВАННОЕ ИМ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2482052C2 |
| МНОГОЭТАЖНАЯ МОНОРЕЛЬСОВАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА-ГАРАЖ | 2000 |
|
RU2188919C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| МОДУЛЬ ОГРАЖДЕНИЯ, ОГРАЖДЕНИЕ НА ЕГО ОСНОВЕ, СПОСОБ ВОЗВЕДЕНИЯ ОГРАЖДЕНИЯ И СПОСОБ ЕГО ДЕМОНТАЖА | 2014 |
|
RU2561129C1 |
| САМОХОДНАЯ БУРОВАЯ УСТАНОВКА | 1999 |
|
RU2211297C2 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОЙ ДОБЫЧИ И СПОСОБ ДОБЫЧИ МАТЕРИАЛА-ОСНОВЫ | 2017 |
|
RU2674492C1 |
Изобретение относится к средствам для транспортировки большой полезной нагрузки по неровной поверхности грунта. Транспортер содержит корпус (4), соприкасающееся с грунтом транспортное средство с приводным средством (1, 2) для перемещения корпуса, несущий полезную нагрузку модуль (5) для удержания полезной нагрузки над корпусом, множество удлиненных телескопических подъемников (6), каждый имеющий первое шарнирное соединение (17) с корпусом на первом конце и второе шарнирное соединение (13) с несущим полезную нагрузку модулем на втором конце. Каждый из множества удлиненных телескопических подъемников выполнен с возможностью независимой работы для изменения высоты и позиции полезной нагрузки относительно корпуса. По меньшей мере один из первого (17) или второго (13) шарнирных соединений содержит ограниченное во вращении соединение, которое позволяет удлиненному телескопическому подъемнику (6) поворачиваться относительно оси, ортогональной направлению его удлинения, или предотвращает его вращение вокруг оси, параллельной направлению его удлинения. Удлиненные телескопические подъемники являются средством, с помощью которого и поднимают полезную нагрузку, и регулируют позицию полезной нагрузки, чтобы ее уравновесить. Изобретение повышает надежность. 19 з.п. ф-лы, 5 ил.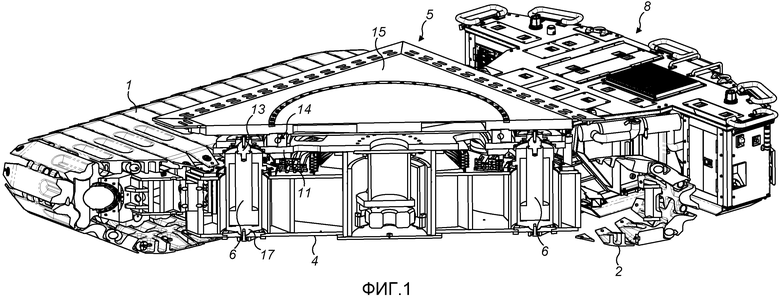
1. Транспортер для транспортировки большой полезной нагрузки по неровной поверхности грунта, содержащий
корпус,
соприкасающееся с грунтом транспортное средство, под корпусом снабженное приводным средством для перемещения корпуса по поверхности грунта при эксплуатации,
несущий полезную нагрузку модуль, чтобы удерживать полезную нагрузку над корпусом при эксплуатации,
группу из четырех удлиненных телескопических подъемников, каждый из которых имеет первое шарнирное соединение с корпусом на первом конце и второе шарнирное соединение с несущим полезную нагрузку модулем на втором конце,
при этом каждый из четырех удлиненных телескопических подъемников выполнен с возможностью независимой работы, чтобы позволить удлиненным телескопическим подъемникам изменять вместе и высоту, и позицию полезной нагрузки относительно корпуса,
при этом каждый подъемник снабжен датчиком нагрузки,
при этом одно из первого или второго шарнирных соединений содержит ограниченное во вращении соединение, которое позволяет удлиненному выдвижному подъемнику поворачиваться относительно оси, ортогональной его направлению удлинения, и при этом действующее так, чтобы предотвратить его вращение вокруг оси, параллельной направлению его удлинения, при этом другое соединение выполнено с возможностью предоставления трех полных степеней свободы вращения.
2. Транспортер по п. 1, в котором подъемники расположены с возможностью выступа вверх из корпуса и приведения в действие для выдвижения и опоры на несущий полезную нагрузку модуль и удержания на нем полезной нагрузки при эксплуатации.
3. Транспортер по п. 1 или 2, в котором каждое ограниченное во вращении соединение выполнено с возможностью обеспечения удлиненному телескопическому подъемнику поворота относительно пары осей, ортогональных направлению его удлинения, и, например, пары ортогональных осей, но с возможностью предотвращения его вращения вокруг оси, параллельной направлению его удлинения.
4. Транспортер по п. 1 или 2, в котором ограниченное во вращении соединение является универсальным шарниром, сконфигурированным с возможностью предотвращения вращения удлиненного телескопического подъемника вокруг оси, параллельной направлению его удлинения, и с возможностью поворота удлиненного телескопического подъемника вокруг оси, перпендикулярной направлению его удлинения.
5. Транспортер по п. 4, в котором ограниченное во вращении соединение является универсальным шарниром, сконфигурированным с возможностью разрешения поворота удлиненного телескопического подъемника вокруг пары осей, ортогональных направлению его удлинения.
6. Транспортер по п. 5, в котором универсальный шарнир содержит пару одноосных универсальных модулей, смонтированных один над другим с ортогональными осями поворота, за счет чего он выполнен с возможностью разрешения вращения вокруг упомянутой пары осей поворота, но с возможностью запрещения вращения вокруг третьей оси, перпендикулярной им.
7. Транспортер по п. 1, в котором указанное другое соединение является шаровым соединением.
8. Транспортер по любому из пп. 1, 2, 5 и 6, в котором каждый из первых шарнирных соединений между корпусом и первым концом удлиненного телескопического подъемника является ограниченным во вращении соединением.
9. Транспортер по п. 8, в котором каждое из вторых шарнирных соединений между несущим полезную нагрузку модулем и вторым концом удлиненного телескопического подъемника сконфигурировано с возможностью разрешения трех полных степеней свободы вращения.
10. Транспортер по п. 9, в котором каждое из вторых шарнирных соединений между несущим полезную нагрузку модулем и вторым концом удлиненного телескопического подъемника является шаровым соединением.
11. Транспортер по п. 1, в котором каждый подъемник имеет датчик нагрузки, связанный с общим центральным модулем управления, при этом общий центральный модуль управления выполнен с возможностью определения места расположения центра тяжести полезной нагрузки, исходя из относительной нагрузки на каждом подъемнике.
12. Транспортер по любому из пп. 1, 2, 5, 6, 9, 10 или 11, в котором несущий полезную нагрузку модуль содержит несущую полезную нагрузку платформу, при этом каждый удлиненный телескопический подъемник проходит между корпусом и несущей полезную нагрузку платформой и приводится в действие с возможностью подъема и опускания несущей платформы при эксплуатации и за счет этого подъема и опускания на ней полезной нагрузки.
13. Транспортер по любому из пп. 1, 2, 5, 6, 9, 10 или 11, в котором каждый подъемник содержит силовой цилиндр, поршень, выдвигающие несущую нагрузку структуру.
14. Транспортер по п. 13, в котором каждый подъемник содержит гидравлический силовой цилиндр или поршневой привод.
15. Транспортер по п. 14, в котором подъемники находятся в квадратной группе.
16. Транспортер по любому из пп. 1, 2, 5, 6, 9, 10, 11, 14 или 15, дополнительно содержащий систему сигнализации для выдачи указания о небезопасной или неустойчивой конфигурации полезной нагрузки.
17. Транспортер по любому из пп. 1, 2, 5, 6, 9, 10, 11, 14 или 15, выполненный с возможностью осуществления операции поворота.
18. Транспортер по п. 17, в котором несущая полезную нагрузку платформа содержит две части: нижний несущий участок входит в зацепление с телескопическими подъемниками и наклоняется под действием телескопических подъемников, и верхний участок, на котором удерживается полезная нагрузка при эксплуатации с возможностью поворота относительно нижнего участка.
19. Транспортер по любому из пп. 1, 2, 5, 6, 9, 9, 10, 11, 14, 15 или 18, в котором приводное средство содержит разнесенную в поперечном направлении пару соприкасающихся с землей катящихся приводов с любой стороны центрального корпуса.
20. Транспортер по п. 19, в котором приводное средство содержит пару гусеничных цепей, расположенных поперечно с любой стороны центрального корпуса.
| МЕХАНИЗМ ВЫБОРА МЕЛОДИИ ДЛЯ ЧАСОВ С БОЕМ | 2016 |
|
RU2705630C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| DE 2926028 A, 12.02.1981 | |||
| DE 19706845 A1, 27.08.1998 | |||
| КОМПРЕССОРНОЕ УСТРОЙСТВО И СПОСОБ ЕГО РАБОТЫ | 2012 |
|
RU2602725C2 |
| Транспортное средство | 1987 |
|
SU1411176A1 |
| ПОДЪЕМНО-ОПУСКНОЕ УСТРОЙСТВО | 0 |
|
SU348407A1 |

