Изобретение относится к измерительной технике и может быть использовано в приборостроении и машиностроении, в частности станкостроении и робото- строении, для диагностики вращающихся валов типа шпинделей, к которым предъявляются высокие требования по надежности.
Целью изобретения является расши- рение функциональных возможностей устройства за счет смены программы контроля вращающейся части.
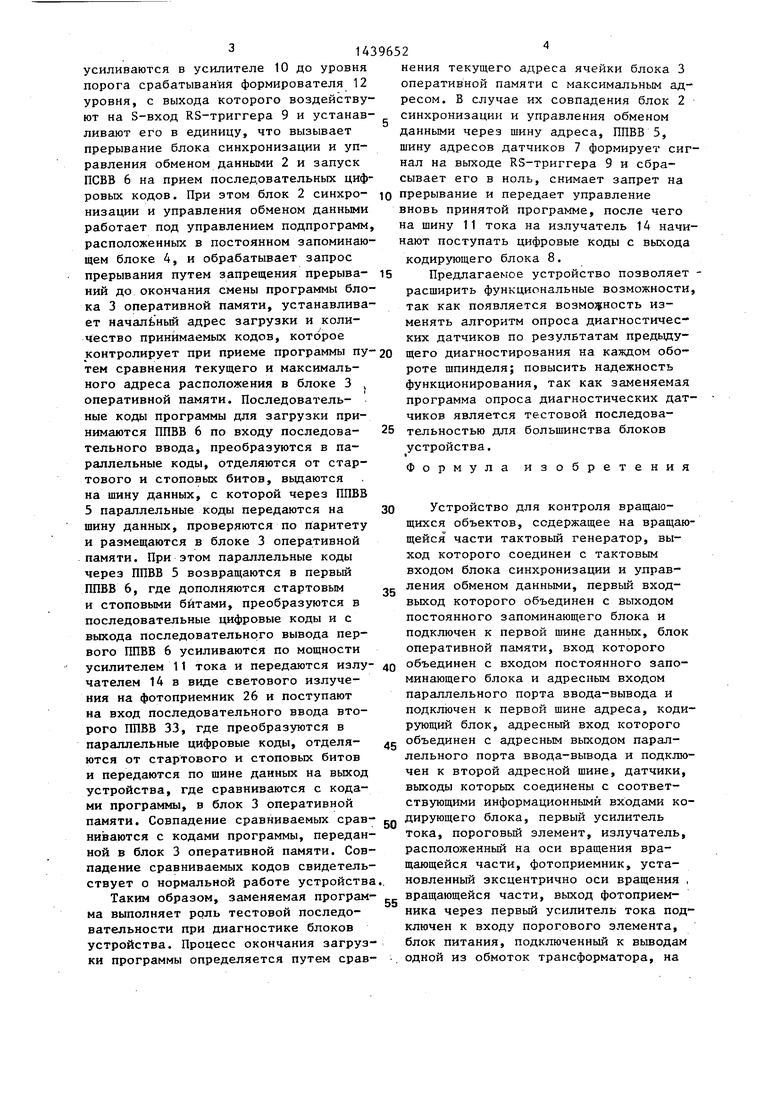
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - устройство, общий вид.
Устройство содержит на вращающейся части 1 блок 2 синхронизации и управления обменом данными, блок 3 оперативной памяти, блок 4 постоянной памяти, параллельный порт 5 ввода- вывода (ППВЗ), последовательный порт 6 ввода-вывода (ППВВ), датчики 7, кодирующий блок 8, RS-триггер 9, усилители 10 и 11 тока, пороговый эле- мент 12, тактовый генератор 13, излучатель 14, фотоприемник 15, блок 16 питания, обмотку 17 трансформатора, элемент синхронизации, выполненный в виде диска 18 с прорезью в кодирующем блоке В, аналоговый коммутатор 19, элемент 20 синхронного считывания ансшого-цифровой преобразователь 21, на неподвижной части 22 обмотку трансформатора 23, источник 24 пита- ния, фотоприемники 25 и 26, излучатели 27 и 28,формирователи 29 и 30 уровня, усилители 31 и 32 тока, последовательный порт 33 ввода- вьшода (ШВВ).
Устройство работает следующим образом.
При вращении вращающегося объекта параметры контроля преобразуются в сигнал и поочередно подключаются через аналоговый коммутатор 19 к входу элемента 12 синхронного считывания 20, в котором запоминаются на время преобразования .в АЦП 21, с выхода которого параллельные цифровые коды, шину данных поступают в ППВВ 6, где исполняются стартовым и стоповыми битами, преобразуются в последовательные цифровые коды и усиливаются по мощности в усилителе 11 тока и передаются излучателем 14 в виде светового излучателя на фотоприемник 15 кодирующего блока 8 осуществляется блоком 2 синхронизации и управления обменом
s
0 5 о 0
с
0
5
данными, при этом в блоке -3 оперативной памяти хранится переменная часть программного обеспечения, состоящая из подпрограммы опроса датчиков 7 посредством указания последовательности и адресов, поступающих по шине адресов датчиков на адресные входы аналогового коммутатора 19, и управления работой ППВВб посредством указания управляющих кодов опроса по щине адресов датчиков, а в постоянном запоминающем блоке 4 хранится постоянная часть программного обеспечения, состоящая из подпрограмм обслуживания сигнала прерывания, приходящего с выхода RS-триггера 9, размещения программы блока 3 оперативной памяти, при смене программ, управления другим блоками при смене программы и передачи управления вновь принятой программе. Световое излучение излучателя 14 воспринимается фотоприемником 26, через формирователь 29 уровня поступает на вход последовательного ввода ППВВ 33, где преобразуется из последовательных цифровых кодов в па- ргшлельные, отделяется от стартового и стоповых битов и передается на вы- ход устройства для накопления, разделения данных от различных диагностических датчиков 7 контроля. Частота блока 2 синхронизации и управления обменом данными ППВБ 6 и АЦП 21 задается генератором 13 такта, а ППВВ 33 - от внешнего источника. Если при анализе информации возникает необходимость изменить алгоритм опроса датчиков 7 то по шине адреса через усилитель 32 тока возбуждается излучение излучателя 28, и в момент, когда отверстие диска 18 окажется против излучателя 28 и фотоприемника 25, что соответствует расположению фотоприемника 15 напротив излучателя 27 срабатывает формирователь 30 уровня приема сигнала и на выход прерывания устройства приходит запрос прерывания. При этом по шине адреса ППВВ 33 передаются управляющие коды, после чего по шине данных - программа для загрузки в блок 3 оперативной памяти, параллельные коды которой дополняются стартовыми и стоповыми битами, преобразуются ППВВ 33 в последовательные цифровые коды, усиливаются по мощности усилителем 31 тока и передаются излучателем 27 в виде светового излучения на фотоприемник 15,
усиливаются в усилителе 10 до уровня порога срабатывания формирователя 12 уровня, с выхода которого воздействуют на S-вход RS-триггера 9 и устанавливают его в единицу, что вызывает прерывание блока синхронизации и управления обменом данньв-1и 2 и запуск ПСВВ 6 на прием последовательных цифровых кодов. При этом блок 2 синхронизации и управления обменом данными работает под управлением подпрограмм расположенньпс в постоянном запоминающем блоке 4, и обрабатывает запрос прерывания путем запрещения прерыва- НИИ до окончания смены программы блока 3 оперативной памяти, устанавливает началЬньш адрес загрузки и количество принимаемых кодов, которое контролирует при приеме программы пу тем сравнения текущего и максимального адреса расположения в блоке 3 , оперативной памяти. Последовательные коды программы для загрузки принимаются ППВВ 6 по входу последовательного ввода, преобразуются в па раллельные коды, отделяются от стартового и стоповых битов, выдаются на шину данных, с которой через ППВВ 5 параллельные коды передаются на шину данных, проверяются по паритету и размещаются в блоке 3 оперативной памяти. При этом параллельные коды через ППВВ 5 возвращаются в первый ППВВ 6, где дополняются стартовым и стоповыми битами, преобразуются в последовательные цифровые коды и с выхода последовательного вывода первого ППВВ 6 усиливаются по мощности усилителем 11 тока и передаются излучателем 14 в виде светового излучения на фотоприемник 26 и поступают на вход последовательного ввода второго ППВВ 33, где преобразуются в параллельные цифровые коды, отделяются от стартового и стоповых битов и передаются по шине данных на выход устройства, где сравниваются с кодами программы, в блок 3 оперативной памяти. Совпадение сравниваемых сравниваются с кодами программы, переданной в блок 3 оперативной памяти. Совпадение сравниваемых кодов свидетельствует о нормальной работе устройства Таким образом, заменяемая программа выполняет роль тестовой последовательности при диагностике блоков устройства. Процесс окончания загрузки программы определяется путем срав
0
5
5 0
0
5
0
5
0
5
нения текущего адреса ячейки блока 3 оперативной памяти с максимальным адресом. В случае их совпадения блок 2 синхронизации и управления обменом данными через шину адреса, ППВВ 5, шину адресов датчиков 7 формирует сигнал на выходе RS-триггера 9 и сбрасывает его в ноль, снимает запрет на прерывание и передает управление вновь принятой программе, после чего на шину 11 тока на излучатель 14 начинают поступать цифровые коды с выхода кодирующего блока 8.
Предлагаемое устройство позволяет - расширить функциональные возможности, так как появляется возмочЕНость изменять алгоритм опроса диагностических датчиков по результатам предыдущего диагностирования на каждом обороте шпинделя; повысить надежность функционирования, так как заменяемая программа опроса диагностических датчиков является тестовой последовательностью для большинства блоков
устройства.
Формула изобретения
Устройство для контроля вращающихся объектов, содержащее на вращающейся части тактовый генератор, выход которого соединен с тактовым входом блока синхронизации и управления обменом данными, первый вход- выход которого объединен с выходом постоянного запоминающего блока и подключен к первой шине данных, блок оперативной памяти, вход которого объединен с входом постоянного запоминающего блока и адресным входом параллельного порта ввода-вывода и подключен к первой шине адреса, коди- рзгющий блок, адресный вход которого объединен с адресным выходом параллельного порта ввода-вывода и подключен к второй адресной шине, датчики, выходы которых соединены с соответствующими информационными входами кодирующего блока, первый усилитель тока, пороговый элемент, излучатель, расположенный на оси вращения вращающейся части, фотоприемник, установленный эксцентрично оси вращения , вращающейся части, выход фотоприемника через первый усилитель тока подключен к входу порогового элемента, блок питания, подключенный к выводам одной из обмоток трансформатора, на
неподвижной части блок питания, подключенный к выводам другой оболочки трансформатора, расположенный на оси вращения вращающейся части, первый фотоприемник, отличающ-еес тем, чтор с целью расширения функциональных возможностей устройства за счет смены программы контроля на каждом обороте вращающегося объекта, на вращающейся части в.устройство введены последовательный порт ввода- вывода, КЗ-триггер, второй усилитель тока, элемент синхронизации, выполненный в виде диска с прорезью, второй вход блока синхронизации и управления обменом данными соединен с первой шиной адреса, вход прерывания с выходом КЗ-триггера, вход-выход блока оперативной памяти и первый вход-выход параллельного порта ввода вывода подключены к первой шине данных, выход тактового генератора соединен с тактовыми входами последовательного порта ввода-вывода и коди рующего блока5 выход которого соединен с вторым входом-выходом параллельного порта ввода-вывода и входом выходом последовательного порта ввода-вывода и подключен к второй шине данных 5 адресный вход последовательного порта ввода-вывода и R-вход КЗ-триггера соединены с второй шиной адреса, вход последовательного ввода последовательного порта .ввода- вывода S-вход и RS-триггера соединены с выходом порогойого элемента,
вьгход последовательного вывода последовательного порта ввода-вывода соединен через второй усилитель тока с излучателем на неподвижной части в устройство введен второй фотоприемник, первый и второй излучатели, первый и второй усилители тока, первый и второй формирователи уровня последовательной порт ввода-вывода, тактовый вход которого является тактовым входом устройства, выход последовательного вывода через первый усилитель тока соединен с первым излучателем, вход последовательного ввода соединен с выходом первого формирователя, выход параллельного вывода является выходом устройства, адресный вход последовательного ввода объединен с вторым входом второго усилителя тока и является адресным входом устройства, первый фотоприемник подключен к входу первого формирователя уровня, выход второго усилителя тока подключен к второму излучателю, второй фотоприемник подключен к входу второго формирователя уровня, выход которого является выходом прерывания устройства, первый излучатель расположен эксцентрично оси вращения вращающейся части напротив фотоприемника вращающейся части, вторые фотоприемник и излучатель неподвижной части расположены на оптической оси, параллельной оси вращения на расстоянии, равном расстоянию прорези диска от оси вращения по разные его стороны.
2«
Фиг.1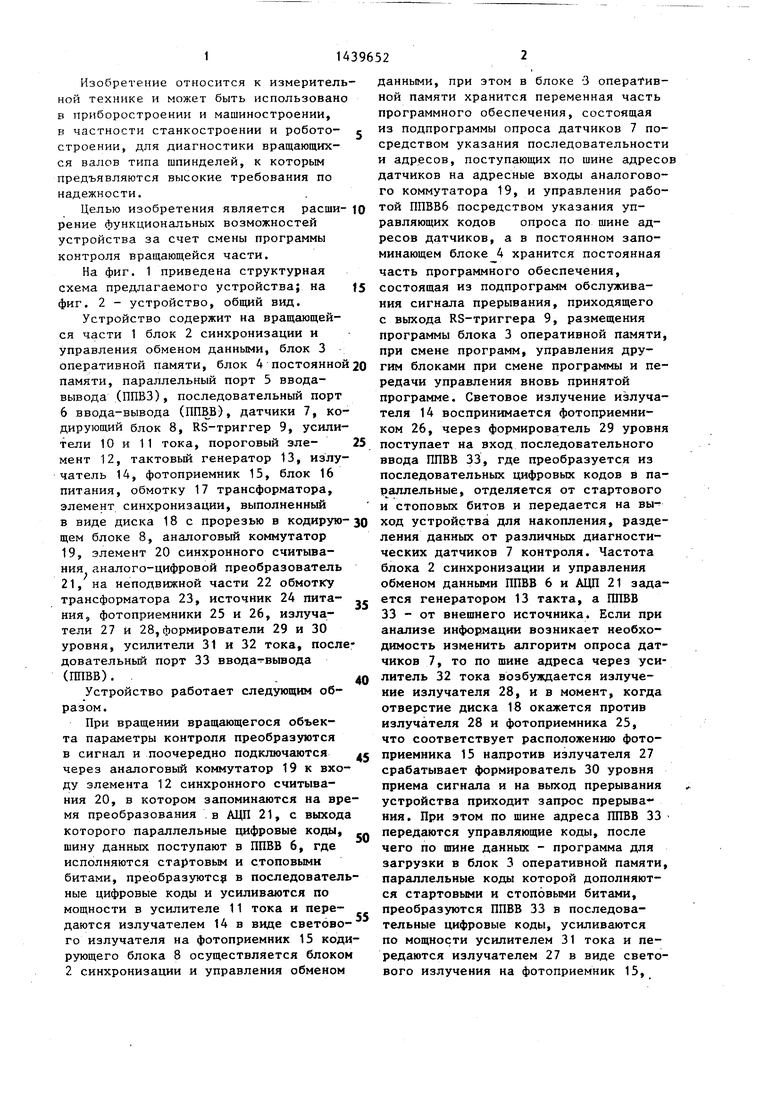
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля шпиндельного узла | 1986 |
|
SU1388929A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЭВМ С ТЕЛЕФОННЫМИ ЛИНИЯМИ СВЯЗИ | 1992 |
|
RU2006927C1 |
| Запоминающее устройство на цилиндрических магнитных доменах | 1987 |
|
SU1451768A1 |
| Устройство для программного управления технологическим оборудованием | 1989 |
|
SU1714575A1 |
| Устройство для обмена информацией | 1987 |
|
SU1497619A1 |
| Система обмена данными в вычислительной сети | 1991 |
|
SU1807493A1 |
| Устройство для сопряжения абонентов с каналом связи | 1987 |
|
SU1432537A1 |
| МНОГОКАНАЛЬНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2244945C1 |
| СИСТЕМА КОММУТАЦИИ ПРОЦЕССОРОВ | 1991 |
|
RU2006931C1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1144190A1 |

Изобретение относится к области измерительной техники и может быть использовано в приб о ростроении и машиностроении, в частности станкостроении и роботостроении, для диагностики вращаюпцихся валов типа шпинделей, к которым предъявляются высокие требования по надежности. Цель изобретения - расширение функциональных возможностей устройства за счет смены программы контроля на каждом обороте вращающегося объекта. При вращении объекта контролируемые параметры с выходов датчиков 7 с указанием ащреса соответствующего датчика 7 в последовательном коде выводятся через последовательный порт 6 ввода-вьшода, усилитель 11 тока к излучатель 14 и передаются с вращающейся части 1 на неподвижную часть 22. В случае необходимости смены программы контроля при фиксированном положении вращающегося объекта в последовательном коде с помощью излучателя 27 и фотоприемника 15 команда управления поступает через параллельный порт 5 ввода-вывода в блок 2 синхронизации и управления обменом данными для замены программы контроля, загружаемой из постоянного запоминающего блока 4 в блок оперативной памяти 3. Замена программ контроля на каждом обороте шпинделя позволяет обеспечивать дополнительную функцию контроля состояния приемопередающего тракта. 2 ил. (Л О9 СО СЛ
| Брандомэтер А | |||
| Бесконтактная передача результатов измерения от фрезерного шпинделя | |||
| - Industrie- Anzeiger, 1979, v | |||
| Светоэлектрический измеритель длин и площадей | 1919 |
|
SU106A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Устройство для контроля шпиндельного узла | 1986 |
|
SU1388929A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
