Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известны многофазные вентильно-индукторные двигатели с прямыми полюсами ротора и статора и сосредоточенными обмотками, расположенными на полюсах статора [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М.: Издательство МЭИ, 2003., с.62]. В таких двигателях Z2=Z1±2, где Z2 - число полюсов ротора; Z1 - число полюсов статора, поэтому ротор вентильно-индукторного двигателя вращается с частотой, меньшей, чем частота первой гармоники токов фаз 
где Ω - частота вращения ротора;
ω - частота первой гармоники токов фаз.
Фазы этих двигателей коммутируются напряжением при помощи полумостовых схем. В результате чего токи фаз становятся существенно нелинейными, в общем случае несинусоидальными и при разложении в ряд Фурье имеют в своем составе нулевую, первую и высшие гармоники [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М.: Издательство МЭИ, 2003., с.10-19].
Основным недостатком этого технического решения является повышенный уровень шумов и вибраций, возникающих из-за резонансных явлений частей вентильно-индукторных двигателей при частотах первой и высших гармоник тока фаз [Шабаев В.А. Анализ источников шума вентильно-индукторного двигателя // Электротехника. 2005, №5. С.62]. Вторым источником шумов и вибраций являются ударные колебания частей вентильно-индукторных двигателей, возникающие благодаря наличию разрывов производных токов фаз и производных индуктивностей фаз по углу поворота ротора, если в этот момент токи фаз не равны нулю. Особенно сильно это проявляется, если эти разрывы совпадают по времени [Wu. С., Pollock С. Analysis and reduction of vibration and acoustic noise in the switches reluctance drive // IEEE transaction on industry application. - V.31. - 1995. - №1. - P.91-98].
Вторым недостатком этого технического решения являются высокие пульсации момента [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М.: Издательство МЭИ, 2003., с.19-21.].
Целями предлагаемого изобретения является уменьшение уровня шумов, вибраций и пульсаций момента.
Поставленные цели достигается тем, что в известных трехфазных вентильно-индукторных двигателях, содержащих явнополюсные симметричные статор и ротор, с Z1=(2×3)p; Z2=(2×3±2)p, где Z1 - число полюсов статора; Z2, - число полюсов ротора; p - число пар полюсов статора, p=1, 2, 4, 8……, угловая ширина полюсов ротора равна угловой ширине межполюсного расстояния полюсов ротора и угловой ширине полюсов статора αпр=αмр=αпс, а обмотки полюсов статора управляются тремя токами
 , при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
, при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
 , при 120°<θ<180°, iA=0, при 180°<θ<360,
, при 120°<θ<180°, iA=0, при 180°<θ<360,
 , при 120°<θ<180°, iB=Imax, при 180°<θ<240°,
, при 120°<θ<180°, iB=Imax, при 180°<θ<240°,
 , при 240°<θ<300°, iB=0, при 300°<θ<420°,
, при 240°<θ<300°, iB=0, при 300°<θ<420°,
 , при 240°<θ<300°, iC=Imax, при 300°<θ<360°,
, при 240°<θ<300°, iC=Imax, при 300°<θ<360°,
 , при 0°<θ<60°, iC=0, при 60°<θ<240°,
, при 0°<θ<60°, iC=0, при 60°<θ<240°,
где iA, iB, iC - текущее значение токов соответствующих фаз; Imax - максимальное значение токов фаз; θ - угловое положение ротора в электрических градусах, которые формируются за счет датчиков токов фаз, датчика положения тока ротора при помощи релейно-токового способа управления.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
- угловая ширина полюсов ротора равна угловой ширине межполюсного расстояния полюсов ротора и угловой ширине полюсов статора;
- обмотки полюсов статора управляются тремя токами,
 , при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
, при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
 , при 120°<θ<180°, iA=0, при 180°<θ<360°,
, при 120°<θ<180°, iA=0, при 180°<θ<360°,
 , при 120°<θ<180° iB=Imax, при 180°<θ<240°,
, при 120°<θ<180° iB=Imax, при 180°<θ<240°,
 , при 240°<θ<300°, iB=0, при 300°<θ<420°,
, при 240°<θ<300°, iB=0, при 300°<θ<420°,
 , при 240°<θ<300° iC=Imax, при 300°<θ<360°,
, при 240°<θ<300° iC=Imax, при 300°<θ<360°,
 , при 0°<θ<60°, iC=0 при 60°<θ<240°;
, при 0°<θ<60°, iC=0 при 60°<θ<240°;
- текущие значения токов фаз формируются за счет датчиков токов фаз, датчика положения тока ротора при помощи релейно-токового способа управления.
Следовательно, заявленное техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения уменьшаются шумы и вибрации вентильно-индукторного двигателя за счет отсутствия разрывов производных токов при текущих значениях токов, не равных нулю, и уменьшаются пульсации момента за счет того, что при такой форме тока и соотношениях угловой ширины полюсов и межполюсных расстояний ротора и статора, определяющих производные индуктивностей фаз по углу поворота ротора, вращающий момент на валу постоянный и не зависит от углового положения ротора.
Следовательно, заявленное техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, электропривода и электродвигателей.
Трехфазных вентильно-индукторных двигателей, содержащих явнополюсные симметричные статор и ротор с Z1=(2×3)p; Z2=(2×3±2)p, угловая ширина полюсов ротора которых равна угловой ширине межполюсного расстояния полюсов ротора и угловой ширине полюсов статора, а обмотки полюсов статора управляются тремя токами,
 , при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
, при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
 , при 120°<θ<180°, iA=0, при 180°<θ<360°,
, при 120°<θ<180°, iA=0, при 180°<θ<360°,
 , при 120°<θ<180°, iB=Imax, при 180°<θ<240°,
, при 120°<θ<180°, iB=Imax, при 180°<θ<240°,
 , при 240°<θ<300°, iB=0, при 300°<θ<420°,
, при 240°<θ<300°, iB=0, при 300°<θ<420°,
 , при 240°<θ<300°, iC=Imax, при 300°<θ<360°,
, при 240°<θ<300°, iC=Imax, при 300°<θ<360°,
 , при 0°<θ<60°, iC=0 при 60°<θ<240°, которые формируются за счет датчиков токов фаз, датчика положения тока ротора при помощи релейно-токового способа управления в известных технических решениях не обнаружено.
, при 0°<θ<60°, iC=0 при 60°<θ<240°, которые формируются за счет датчиков токов фаз, датчика положения тока ротора при помощи релейно-токового способа управления в известных технических решениях не обнаружено.
Таким образом, указанные признаки обеспечивают заявленному техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 приведен трехфазный вентильно-индукторный двигатель с минимальными шумами, вибрациями и пульсациями момента, с 6 полюсами статора и 4 полюсами ротора. На фиг.1 обозначено: 1 - полюс статора; 2 - полюс ротора; 3 - обмотка полюса статора; 4 - вал; А-С - полюса статора, оснащенные обмотками соответствующих фаз; αnp - угловой размер полюса ротора; αnc - угловой размер полюса статора; αмр - угловой размер межполюсного расстояния ротора. В данном двигателе αnp=αnc=αмр=45°.
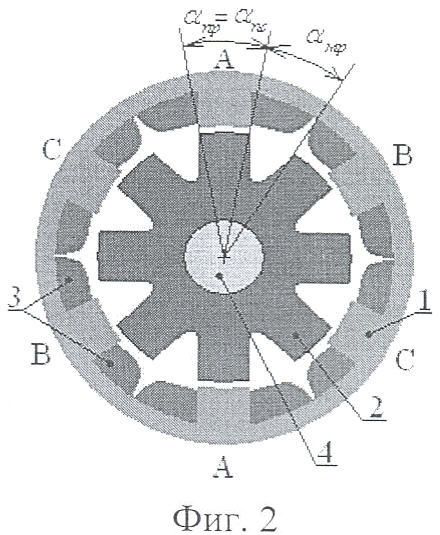
На фиг.2 приведен трехфазный вентильно-индукторный двигатель с минимальными шумами, вибрациями и пульсациями момента, с 6 полюсами статора и 8 полюсами ротора. На фиг.2 обозначено: 1 - полюс статора; 2 - полюс ротора; 3 - обмотка полюса статора; 4 - вал; A-C - полюса статора, оснащенные обмотками соответствующих фаз; αnp - угловой размер полюса ротора; αnc - угловой размер полюса статора; αмр - угловой размер межполюсного расстояния ротора. В данном двигателе αnp=αnc=αмр=22,5°.
На фиг.3 приведены диаграммы работы трехфазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента. На фиг.3 обозначено: θ=0°……360° - угловое положение ротора относительно статора в электрических градусах; iA, iB, iC - текущие значения токов соответствующих фаз; (iA)2, (iB)2, (iC)2 - текущие значения токов соответствующих фаз в квадрате; LA, LB, LC - индуктивности соответствующих фаз в зависимости от углового положения ротора; Lmax, Lmin - максимальные и минимальные значения индуктивностей фаз;  ,
,  ,
,  - производные индуктивностей фаз по углу поворота ротора; MA(t):=dLA(t)0,5(IA(t))2 - вращающий момент на валу двигателя, создаваемый фазой А; МА+MB+МС - суммарный вращающий момент на валу двигателя, создаваемый фазами А, В С.
- производные индуктивностей фаз по углу поворота ротора; MA(t):=dLA(t)0,5(IA(t))2 - вращающий момент на валу двигателя, создаваемый фазой А; МА+MB+МС - суммарный вращающий момент на валу двигателя, создаваемый фазами А, В С.
На фиг.4 приведена структурная схема регулятора момента трехфазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента. На фиг.4 обозначено: R - резистор, задающий амплитуду и направление вращения вектора заданного тока; +U, -U - напряжения питания резистора, задающего амплитуду и направление вращения вектора заданного тока; Iз - заданный вектор тока; БИП - блок изменения полярности; БВМ - блок выделения модуля (линейный выпрямитель); ЦАПА, ЦАПВ, ЦАПС - цифроаналоговые преобразователи соответствующих фаз; ПЗУА, ПЗУВ, ПЗУС - постоянные запоминающие устройства соответствующих фаз; ДП - датчик положения ротора вентильно-индукторного двигателя; БСА, БСВ, БСС - блоки сравнения текущих значений заданных токов и токов обмоток соответствующих фаз; iA, iB, iC - текущие значения токов обмоток соответствующих фаз; K1-K6 - компараторы с гистерезисом; VT1-VT6 - силовые транзисторы; компаратор направления момента; VD1-VD6 - силовые диоды; ДТ1-ДТ4 - датчики тока; Е - источник постоянного напряжения; С - конденсатор источника постоянного напряжения; LA-LC - индуктивности соответствующих фаз; БВМ - блок выделения модуля.
Регулятор момента трехфазного вентильно-индукторного двигателя работает следующим образом. Резистором R задается амплитуда и полярность вектора тока Iз. Сигнал, пропорциональный Iз, подается на вход БВМ, с выхода которого сигналы подаются на аналоговые входы ЦАПА, ЦАПВ и ЦАПС. Сигнал, пропорциональный Iз, подается и на вход K7, который определяет направление вращающего момента в зависимости от полярности Iз, на вторые входы ЦАПА, ЦАПВ и ЦАПС подаются коды с выходов ПЗУА, ПЗУВ, ПЗУС, входы которых соединены с выходами датчика положения ротора ДП и выходом компаратора K7. На выходах ЦАПА, ЦАПВ и ЦАПС формируются сигналы, пропорциональные заданным токам фаз (в соответствии с фиг.3). Эти сигналы подаются на входы БСА, БСВ и БСС, на другие входы которых подаются сигналы, пропорциональные текущим значениям токов iA, iB, iC, а разности сигналов, пропорциональных заданным токам и текущим значениям токов фаз, подаются на входы компараторов, выходы которых подсоединены к базам соответствующих транзисторов и включают и выключают их, регулируя среднее значение токов iA, iB, iC в соответствии с заданными значениями.
Момент, который развивает каждая фаза  при конфигурациях вентильно-индукторных двигателей, показанных на фиг.1 и фиг.2, показан на фиг.3. Индуктивность каждой фазы двигателя в процессе вращения увеличивается и уменьшается линейно пропорционально углу поворота ротора с периодом 360 электрических градусов и со сдвигом 120 электрических градусов (как показано на фиг.3), поэтому функция
при конфигурациях вентильно-индукторных двигателей, показанных на фиг.1 и фиг.2, показан на фиг.3. Индуктивность каждой фазы двигателя в процессе вращения увеличивается и уменьшается линейно пропорционально углу поворота ротора с периодом 360 электрических градусов и со сдвигом 120 электрических градусов (как показано на фиг.3), поэтому функция  постоянна по амплитуде, но периодически меняет свой знак через 180 электрических градусов, а периоды производных индуктивностей фаз
постоянна по амплитуде, но периодически меняет свой знак через 180 электрических градусов, а периоды производных индуктивностей фаз  сдвинуты на 120 электрических градусов. Ток фазы А, квадрат тока фазы А и
сдвинуты на 120 электрических градусов. Ток фазы А, квадрат тока фазы А и  , при 120°>θ>60° - постоянны и имеют положительный знак, поэтому и момент, развиваемый этой фазой
, при 120°>θ>60° - постоянны и имеют положительный знак, поэтому и момент, развиваемый этой фазой  постоянен, имеет положительный знак и
постоянен, имеет положительный знак и  . При 60°>θ>0°
. При 60°>θ>0°  , а
, а  , так как
, так как  , то
, то  , аналогичные вычисления можно провести для 360°>θ>0° и везде момент будет иметь постоянное значение, а уменьшение шумов и вибраций обеспечивается тем, что разрыв производных индуктивностей фаз по углу поворота ротора происходит при токах этих фаз, равных нулю.
, аналогичные вычисления можно провести для 360°>θ>0° и везде момент будет иметь постоянное значение, а уменьшение шумов и вибраций обеспечивается тем, что разрыв производных индуктивностей фаз по углу поворота ротора происходит при токах этих фаз, равных нулю.


Изобретение относится к области электротехники и может быть использовано в электроприводах различных механизмов и исполнительных устройствах автоматических систем. Техническим результатом является уменьшение шумов, вибраций и увеличение равномерности вращающего момента. В трехфазном вентильно-индукторном двигателе магнитопровод двигателя имеет такую конфигурацию ротора и статора, которая обеспечивает постоянную величину производных индуктивностей обмоток фаз по углу поворота ротора, знак которой меняется периодически с периодом 360 электрических градусов, а период производных индуктивностей обмоток фаз по углу поворота ротора сдвинут на 120 электрических градусов, фазы двигателя коммутируются токами специальной формы, которая не имеет разрывов производных при токах, не равных нулю, и обеспечивает отсутствие тока в точках, где происходит разрыв производных индуктивностей фаз по углу поворота ротора, форма этих токов обеспечивается схемой управления при помощи релейно-токового способа управления. 4 ил.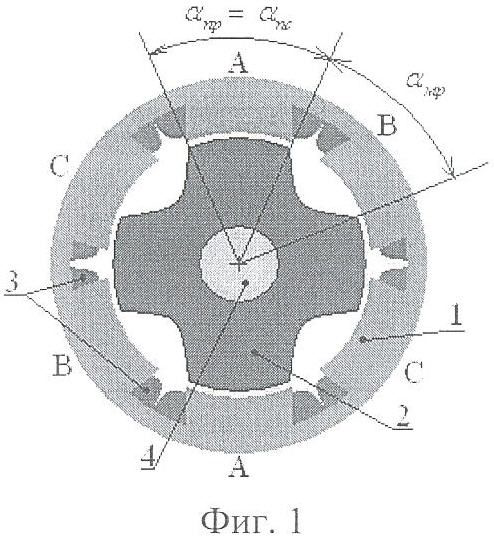
Трехфазный вентильно-индукторный двигатель, содержащий явнополюсные симметричные статор и ротор с Z1=(2×3)p, Z2=(2×3±2)p, где Z1 - число полюсов статора; Z2 - число полюсов ротора; р - число пар полюсов ротора и статора, р=1, 2, 4, 8……, отличающийся тем, что угловая ширина полюсов ротора равна угловой ширине межполюсного расстояния полюсов ротора и угловой ширине полюсов статора αпр=αмр=αпс, а обмотки полюсов статора управляются тремя токами,  , при 0°<θ<60°, iA=Imax, при 60°<θ<120°,
, при 0°<θ<60°, iA=Imax, при 60°<θ<120°,  , при 120°<θ<180°, iA=0, при 180°<θ<360°,
, при 120°<θ<180°, iA=0, при 180°<θ<360°,  , при 120°<θ<180°, iB=Imax, при 180°<θ<240°,
, при 120°<θ<180°, iB=Imax, при 180°<θ<240°,  , при 240°<θ<300°, iB=0, при 300°<θ<420°,
, при 240°<θ<300°, iB=0, при 300°<θ<420°,  , при 240°<θ<300°, iC=Imax, при 300°<θ<360°,
, при 240°<θ<300°, iC=Imax, при 300°<θ<360°,  , при 0°<θ<60° iC=0, при 60°<θ<240°,
, при 0°<θ<60° iC=0, при 60°<θ<240°,
где iA, iB, iC - текущее значение токов соответствующих фаз; Imax - максимальное значение токов фаз; θ - угловое положение ротора в электрических градусах, которые формируются за счет датчиков токов фаз, датчика положения тока ротора при помощи релейно-токового способа управления.
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2084070C1 |
| МЕХАТРОННАЯ СИСТЕМА | 2009 |
|
RU2404503C1 |
| Машина для квадратной посадки рассады в торфоперегнойных горшочках | 1953 |
|
SU99663A1 |
| СПОСОБ КИСЛОРОДНОЙ ОЧИСТКИ И ПАССИВАЦИИ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ КОТЕЛЬНЫХ ТРУБ | 2006 |
|
RU2303745C1 |
| US 6479953 B2, 12.11.2002 | |||
| Сверхвысокочастотное устройство связи | 1976 |
|
SU720694A1 |
| Способ изготовления оболочковых форм,получаемых по выплавляемым моделям | 1983 |
|
SU1139560A1 |
| WO 199001823 A1, 22.02.1990 | |||
| KR 1020060105828 A, 11.10.2006. | |||

