Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известны многофазные вентильно-индукторные двигатели с прямыми полюсами ротора и статора и сосредоточенными обмотками, расположенными на полюсах статора [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003, с.62.].
Основным недостатком этих вентильно-индукторных двигателей является то, что при коммутации фаз токи фаз протекают только в одном направлении, поэтому для коммутации тока каждой фазы необходимо применение полумостовых схем [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003, с.10, 15, 17]. Применение полумостовых схем для коммутации токов фаз увеличивает суммарную мощность полупроводниковых приборов инвертора примерно в два раза по сравнению с традиционными мостовыми схемами, широко используемыми для управления трехфазными асинхронными и вентильными двигателями Питание машин с регулируемой реактивностью. G. Glaize. H. Foch. L'alimentation des machines a'reluctance variable. Machines a'Reluctance Variable, 30 septembre 1985, Франция].
Вторым недостатком этого технического решения является то, что силовые транзисторные модули, которые применяются для инверторов на полумостовых схемах, имеют более высокую цепу по сравнению с силовыми транзисторными модулями, применяемыми в традиционных мостовых схемах инверторов, за счет большего на один числа выводов. Кроме того, для реализации инверторов на полумостовых схемах необходимы два типа модулей (модуль, в котором коллектор транзистора соединен с анодом диода, и модуль, в котором коллектор транзистора соединен с катодом диода), что увеличивает номенклатуру комплектующих изделий.
Третьим недостатком этих вентильно-индукторных двигателей, по сравнению с трехфазными асинхронными и вентильными двигателями, имеющими три вывода, является большое число выводов (так у трехфазного вентильно-индукторного двигателя число выводов - шесть, у четырехфазного - восемь, у шестифазного - двенадцать).
Четвертым недостатком этого технического решения является то, что при монтаже инверторов на полумостовых схемах для вентильно-индукторных двигателей увеличиваются затраты на монтажные работы по сравнению с затратами на монтаж трехфазных мостовых инверторов, применяемых для управления трехфазными асинхронными и вентильными двигателями.
Пятым недостатком этого технического решения является то, что каждый полюс статора этих двигателей оснащен сосредоточенной обмоткой, занимающей половину паза. В результате чего полный ток каждого полюса статора определяется числом витков, допустимой плотностью тока, коэффициентом заполнения и площадью паза. В двигателях с распределенными обмотками полный ток полюса определяется в том числе и числом обмоток, охватывающий данный полюс, что позволяет уменьшить площадь пазов и габариты двигателя, или увеличить сечение проводников обмоток при том же полном токе полюсов статора и уменьшить омические потери.
Наиболее близким к предлагаемому изобретению является высокоскоростной вентильно-индукторный двухфазный нереверсивный двигатель (патент РФ №2368053).
Недостатком этого технического решения является то, что этот двигатель является нереверсивным, и поэтому имеет ограниченную область применения.
Целями предлагаемого изобретения является уменьшение числа выводов вентильно-индукторного двигателя, уменьшение массогабаритных показателей инвертора, увеличение коэффициента полезного действия вентильно-индукторного двигателя и инвертора, увеличение частоты вращения при той же частоте коммутации полного тока полюсов статора, применение стандартного трехфазного мостового инвертора и расширение области применения за счет возможности использования реверса.
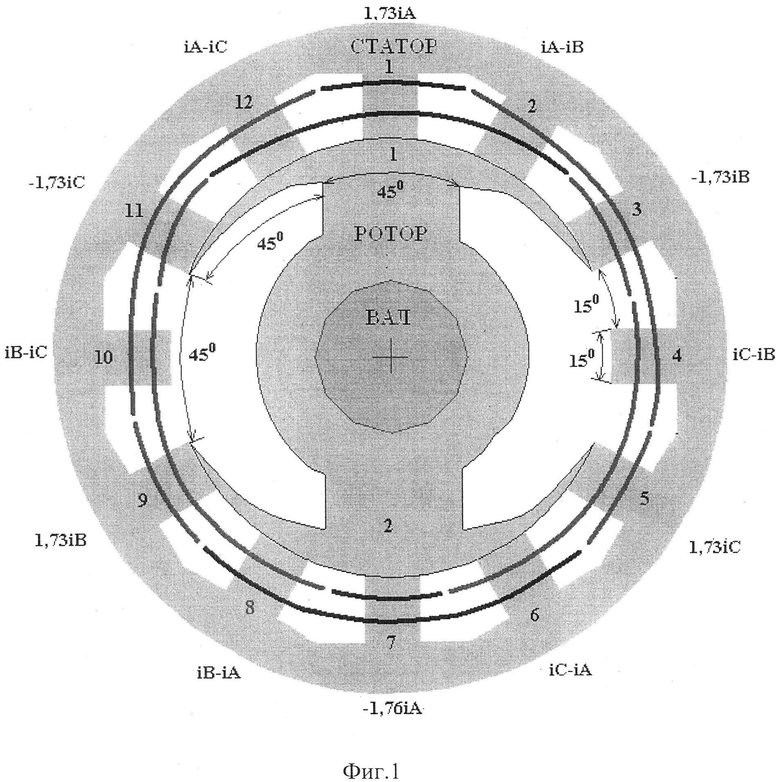
Поставленные цели достигается тем, что в известных шестифазных вентильно-индукторных двигателях, содержащих явнополюсные симметричные статор и ротор, со статором, имеющим 12 сосредоточенных полюсов с обмотками, ротор содержит 2 полюса без обмоток с четырьмя когтеобразными выступами, угловая ширина полюсов статора и угловая ширина межполюсного расстояния статора равна 15 градусам, угловая ширина полюсов ротора с когтеобразными выступами равна 135 градусов, угловая ширина когтеобразных выступов полюсов ротора, угловая ширина межполюсного расстояния ротора и угловая ширина полюсов ротора за исключением когтеобразных выступов полюсов, равны 45 градусам, причем обмотки одной фазы охватывают одновременно три полюса и один полюс статора, расположенный в середине трех полюсов, охваченных одной обмоткой. Суммарный полный ток этих двух обмоток равен 1,73 в относительных единицах за счет того, что число витков обмоток, охватывающих три полюса, относится к числу витков обмоток, охватывающих один полюс, как 1/0,73. Четные полюса статора охвачены обмотками разных фаз, токи в которых сдвинуты на 30 электрических градусов за счет сдвига токов фаз на 120 электрических градусов и за счет чередующегося изменения начала и конца обмоток, дающего дополнительный сдвиг фаз 180 электрических градусов. При этом полный ток нечетных полюсов становится равным IABmax=IAmaxsin120°-IBmaxsin60°=1,73 Iфmax. Где IABmax - максимальное значение полных токов нечетных полюсов: IAmax - максимальное значение тока фазы А; IBmax - максимальное значение тока фазы В; Iфmax - максимальное значение фазных токов. То есть максимальные полные токи обмоток четных и нечетных полюсов равны, токи сдвинуты по фазе на 30 электрических градусов и представляют собой шестифазную систему полных токов полюсов. Обмотки фаз могут быть соединены в «звезду» или в «треугольник» и имеют три вывода. При вращении ротора индуктивность каждого полюса не изменяется при изменении положения ротора на 30 градусов при максимальном значении индуктивности полюса и на 30 градусов при минимальном значении индуктивности, в этих случаях производная индуктивности по углу поворота ротора равна нулю. Поэтому 


По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
1. Явнополюсные симметричные статор и ротор, со статором, имеющим 12 сосредоточенных полюсов с обмотками и ротором, имеющим 2 полюса без обмоток с четырьмя когтеобразными выступами, угловая ширина полюсов статора и угловая ширина межполюсного расстояния статора равна 15 градусам, угловая ширина полюсов ротора с когтеобразными выступами равна 135 градусов, угловая ширина когтеобразных полюсов, угловая ширина межполюсного расстояния ротора и угловая ширина полюсов ротора за исключением когтеобразных выступов полюсов равны 45 градусам;
2. Обмотки каждой из трех фаз охватывают одновременно три полюса и один полюс статора, расположенный в середине трех полюсов, причем число витков обмоток, охватывающих три полюса статора, относится к числу витков, охватывающих один полюс статора примерно как 1/0,73;
3. Фазы двигателя питаются трехфазным током, имеющим сдвиг фаз 120 электрических градусов, который формируется при помощи стандартного трехфазного мостового инвертора и управляется частотно-токовым методом управления;
4. Число выводов двигателя при соединении в «звезду» или в «треугольник» равно трем.
Следовательно, заявленное техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения уменьшается число выводов двигателя, упрощается монтаж силового инвертора, уменьшается число и цена полупроводниковых приборов инвертора, увеличивается коэффициент полезного действия двигателя и инвертора и увеличивается частота вращения при той же частоте токов фаз.
Следовательно, заявленное техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений к области электротехники, электропривода и электродвигателей.
Шестифазных вентильно-индукторных двигателей, содержащих явнополюсные симметричные статор и ротор, со статором, имеющим 12 сосредоточенных полюсов с концентрическими обмотками и ротором, имеющим 2 полюса без обмоток с четырьмя когтеобразными выступами, угловая ширина полюсов статора и угловая ширина межполюсного расстояния статора равна 15 градусам, угловая ширина полюсов ротора с когтеобразными выступами равна 135 градусам угловая ширина когтеобразных выступов полюсов ротора, угловая ширина межполюсного расстояния ротора и угловая ширина полюсов ротора за исключением когтеобразных выступов полюсов равны 45 градусам, с обмотками каждой из трех фаз, охватывающими одновременно три полюса, и один полюс статора, расположенный в середине трех полюсов, с числом витков обмоток, охватывающих три полюса статора, относящимся к числу витков, охватывающих один полюс статора, примерно как 1/0,73, с фазами двигателя, питающимися трехфазным током, имеющим сдвиг фаз 120 электрических градусов, который формируется при помощи стандартного трехфазного мостового инвертора и управляется частотно-токовым методом управления, с числом выводов двигателя при соединении в «звезду» или в «треугольник» равным трем, не обнаружено.
Таким образом, указанные признаки обеспечивают заявленному техническому решению соответствие требованию «существенные отличия».
Возможны варианты таких вентильно-индукторных двигателей с соотношением полюсов 
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 приведен высокоскоростной шестифазный вентильно-индукторный двигатель с концентрическими обмотками, управляемый трехфазным током синусоидальной формы. На фиг.1 обозначено: 1-12 - полюса статора; 1, 2 - полюса ротора; iA, iB, iC - токи соответствующих фаз.
На фиг.2 приведены схемы обмоток соответствующих фаз шестифазного высокоскоростного вентильно-индукторного двигателя с концентрическими обмотками, управляемого трехфазным током синусоидальной формы. На фиг.2 обозначено: 1-12 - номера полюсов статора; нА, нВ, нС - начала обмоток соответствующих фаз; кА, кВ, кС - копны обмоток соответствующих фаз.
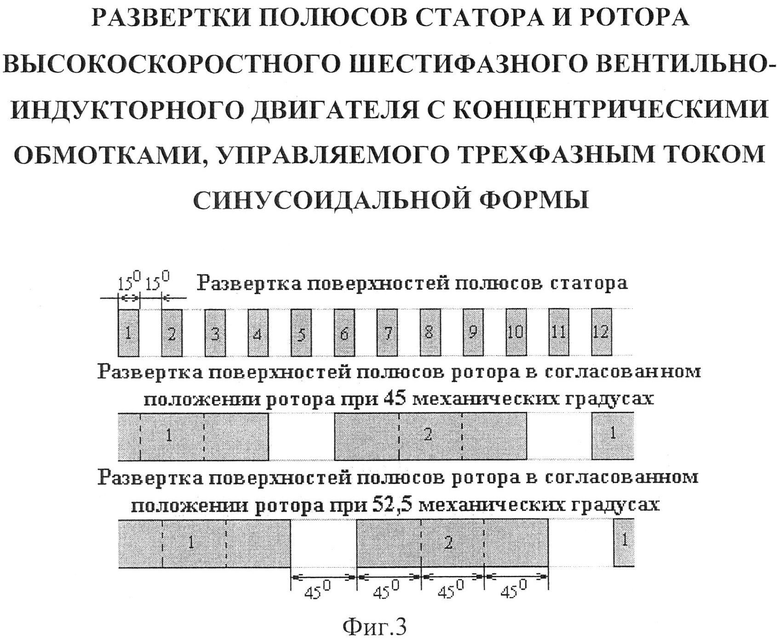
На фиг.3 приведены развертки поверхностей полюсов статора и ротора высокоскоростного шестифазного вентильно-индукторного двигателя с концентрическими обмотками, управляемого трехфазным током синусоидальной формы. На фиг.3 обозначено: 1-12 - номера полюсов статора, на которых размещены обмотки в соответствии с фиг.2; 1-2 номера полюсов ротора; 15° - угловая ширина полюсов статора и межполюсного расстояния статора; 45° - угловая ширина межполюсного расстояния ротора, угловая ширина когтеобразных выступов полюсов и угловая ширина полюсов ротора за исключением когтеобразных выступов полюсов.
На фиг.4 приведены диаграммы работы высокоскоростного шестифазного вентильно-индукторного двигателя с концентрическими обмотками, управляемого трехфазным током синусоидальной формы. На фиг.4, а приведены диаграммы трехфазного тока. На фиг.4, а обозначено: iA, iB, iC - токи соответствующих фаз; -iA, -iB -iC - токи соответствующих фаз, сдвинутые на 180 электрических градусов; Imax - амплитудные значения токов; θ=0…360 - угол поворота ротора относительно статора в электрических градусах. На фиг.4, б приведены диаграммы полных токов полюсов статора. На фиг. 4, в приведены диаграммы модуля и квадрата полного тока полюсов статора 2, 8, 12, 20. На фиг.4, г приведена таблица значений модуля и квадрата полного тока полюсов статора 2, 8, 12, 20 в относительных единицах.
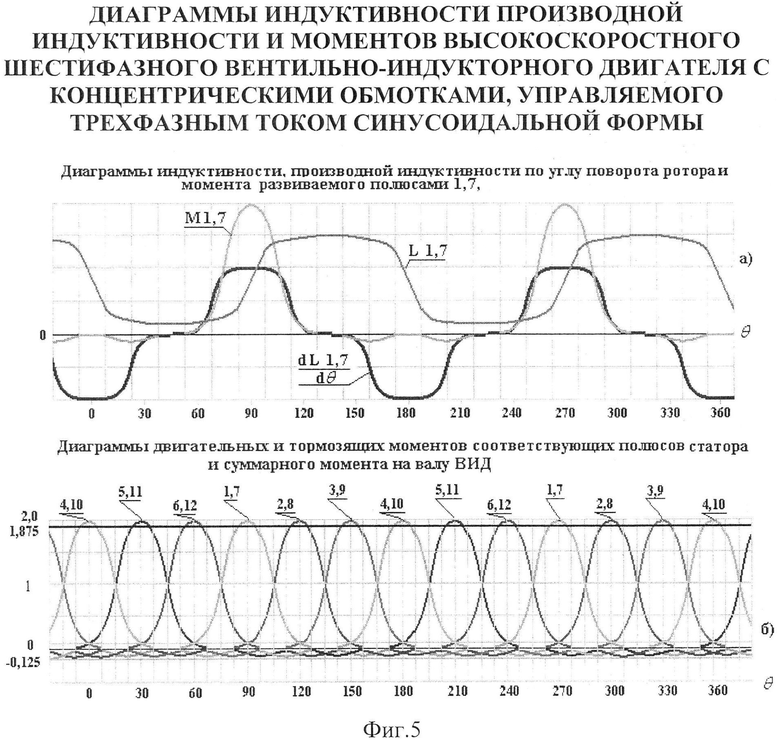
На фиг.5 приведены диаграммы индуктивности, производной индуктивности моментов высокоскоростного шестифазного вентильно-индукторного двигателя с концентрическими обмотками, управляемого трехфазным током синусоидальной формы. На фиг.5, а приведены диаграммы индуктивностей, производных индуктивностей по углу поворота ротора и момента полюсов 1, 7 статора. На фиг.5, а обозначено: L 1, 7 - индуктивности соответствующих полюсов; 
На фиг.6 приведена структурная схема регулятора момента высокоскоростного шестифазного вентильно-индукторного двигателя с 12 полюсами статора и двумя полюсами ротора, управляемого трехфазным током синусоидальной формы. На фиг.6 обозначено: R - резистор, задающий амплитуду и направление вращения вектора заданного тока; +U, -U - напряжения питания резистора, задающего амплитуду и направление вращения вектора заданного тока; Iз - заданный вектор тока; БИП - блок изменения полярности; -1 - коэффициент передачи блока изменения полярности; ПА, ПВ, ПС - переключатели полярностей тока задания соответствующих фаз; ПАПА, ЦАПВ, ЦАПС - цифроаналоговые преобразователи соответствующих фаз; ПЗУА, ПЗУВ, ПЗУС - постоянные запоминающие устройства соответствующих фаз; ДП - датчик положения ротора вентильно-индукторного двигателя; БСА, БСВ, БСС, - блоки сравнения текущих значений заданных токов и токов обмоток соответствующих фаз; iA, iB, iC - текущие значения токов обмоток соответствующих фаз; К1-К6 - компараторы с гистерезисом; Б1, Б2, Б3 - блоки с коэффициентом передачи равным -1, изменяющие полярность выходного напряжения компараторов К2, К4, К6; VT1-VT6 - силовые транзисторы; VD1-VD6 - силовые диоды; ДТ1-ДТ3 - датчики тока; Е - источник постоянного напряжения; С - конденсатор источника постоянного напряжения; ВИД - вентильно-индукторный двигатель; А, В, С - фазы инвертора; БСОВ - блок сравнения текущих значений заданного трехфазного тока и тока обмоток.
Регулятор момента высокоскоростного шестифазного вентильно-индукторного двигателя с 12 полюсами статора и 2 полюсами ротора. управляемого трехфазным током синусоидальной формы, работает следующим образом: резистором R задается амплитуда и полярность вектора тока Iз, БИП изменяет полярность Iз на противоположную. Сигналы различной полярности, пропорциональные Iз, подаются на входы переключателей соответствующих фаз ПА, ПВ, ПС, на управляющие входы которых подаются сигналы с выходов постоянных запоминающих устройств соответствующих фаз ПЗУА, ПЗУВ, ПЗУС, соединенных с датчиком положения ротора. Сигналы с ПЛ, ПВ, ПС, и ПЗУА, ПЗУВ, ПЗУС подаются на входы цифроаналоговых преобразователей соответствующих фаз ЦАПА, ЦАПВ, ЦАПС, на выходах которых формируется трехфазное синусоидальное напряжение, амплитуда которого пропорциональна Iз, частота - пропорциональна частоте вращения ротора, при изменении полярности Iз при помощи резистора R происходит сдвиг токов фаз на 180 электрических градусов. Заданные токи фаз сравниваются при помощи блоков сравнения текущих значений заданных токов и токов обмоток соответствующих фаз БСА, БСВ, БСС, причем сигналы, пропорциональные токам фаз, поступают с трех датчиков токов ДТ1-ДТ3, а сигналы, пропорциональные заданным токам, поступают с выходов трех цифроаналоговых преобразователей ЦАПА, ЦАПВ, ЦАПС, а их разность поступает на входы компараторов с гистерезисом К1-К6, которые совместно с блоками, имеющими коэффициент передачи равный -1 - Б1, Б2, Б3 и трехфазным инвертором, выполненном на транзисторах VT1-VT6 и на диодах VD1-VD6, формируют трехфазные токи, имеющие синусоидальную форму и амплитуду, пропорциональную Iз.
Таким образом, использование в электроприводах различных механизмов и исполнительных устройствах автоматических систем шестифазных высокоскоростных вентильно-индукторных двигателей с концентрическими обмотками, управляемого трехфазным током синусоидальной формы, имеющих статор с 12 сосредоточенными полюсами с обмотками и ротор, содержащий 2 полюса без обмоток оснащенный четырьмя котлообразными выступами, угловая ширина полюсов статора и угловая ширина межполюсного расстояния статора которых равна 15 градусам, угловая ширина полюсов ротора с когтеобразными выступами равна 135 градусов, угловая ширина когтеобразных выступов полюсов ротора, угловая ширина межполюсного расстояния ротора и угловая ширина полюсов ротора за исключением когтеобразных выступов полюсов равны 45 градусам, с обмотками одной фазы, охватывающими одновременно три полюса и один полюс статора, расположенный в середине трех полюсов, охваченных одной обмоткой, с полным суммарным током этих двух обмоток равным 1,73 в относительных единицах, с четными полюсами статора, охваченными обмотками разных фаз, токи которых сдвинуты на 30 электрических градусов за счет сдвига токов фаз на 120 электрических градусов и за счет чередующегося изменения начала и конца обмоток, дающего дополнительный сдвиг фаз на 180 электрических градусов, который формируется при помощи стандартного трехфазного мостового инвертора, управляемого частотно-токовым методом, отличается тем, что с целью увеличения частоты вращения, увеличения коэффициента полезного действия и применения для управления стандартного трехфазного инвертора статор двигателя оснащен специальными концентрическими обмотками.
Использование предлагаемого технического решения в электроприводах различных механизмов и исполнительных устройствах обеспечит повышение эффективности и качества работы этих устройств.


Изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем. Технический результат заключается в увеличении частоты вращения при той же частоте коммутации токов фаз, уменьшении числа выводов двигателя. В предлагаемом изобретении это достигается за счет соотношений угловых размеров полюсов ротора с когтеобразными выступами, концентрических обмоток и управления частотно-токовым методом. Шестифазный высокоскоростной вентильно-индукторный двигатель с концентрическими обмотками статора, управляемый трехфазным током синусоидальной формы, содержит статор с двенадцатью полюсами и ротор с двумя полюсами. Статор двигателя оснащен трехфазными концентрическими обмотками. Обмотки каждой из трех фаз охватывают одновременно три полюса и один полюс статора, расположенный в середине трех полюсов. Число витков, охватывающих три полюса статора, относится к числу витков, охватывающих один полюс статора, примерно как 1/0,73. Ротор оснащен когтеобразными выступами. Управление производится частотно-токовым методом. 6 ил.
Шестифазный высокоскоростной вентильно-индукторный двигатель с концентрическими обмотками статора, управляемый трехфазным током синусоидальной формы, содержащий статор с двенадцатью полюсами и ротор с двумя полюсами, отличающийся тем, что статор двигателя оснащен трехфазными концентрическими обмотками, обмотки каждой из трех фаз охватывают одновременно три полюса и один полюс статора, расположенный в середине трех полюсов, причем число витков, охватывающих три полюса статора, относится к числу витков, охватывающих один полюс статора, примерно как 1/0,73, ротор оснащен когтеобразными выступами, а управление производится частотно-токовым методом.
| ВЫСОКОСКОРОСТНОЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2368053C1 |
| МЕХАТРОННАЯ СИСТЕМА С ЧЕТЫРЕХФАЗНЫМ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2439769C1 |
| Бесконтактная синхронная электрическая машина | 1984 |
|
SU1162008A1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| US 20110234027 A1, 29.09.2011 | |||

