Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известны многофазные вентильно-индукторные двигатели с прямыми полюсами ротора и статора и сосредоточенными обмотками, расположенными на полюсах статора [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003., с.62.].
Основным недостатком этих вентильно-индукторных двигателей является то, что при коммутации фаз токи фаз протекают только в одном направлении, поэтому для коммутации каждой фазы необходимо применение полумостовых схем [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003., с.10, 15, 17.]. Применение полумостовых схем для коммутации фаз увеличивает суммарную мощность и цену полупроводниковых приборов инвертора примерно в два раза по сравнению с традиционными мостовыми схемами, широко используемыми для управления асинхронными и вентильными двигателями [Питание машин с регулируемой реактивностью. G. Glaize. H. Foch. L′alimentation des machines a′reluctance variable. Machines a′Reluctance Variable, 30 septembre 1985, Франция.].
Вторым недостатком этого технического решения является то, что силовые транзисторные модули, которые применяются для инверторов на полумостовых схемах, имеют более высокую цену по сравнению с силовыми транзисторными модулями, применяемыми в традиционных мостовых схемах инверторов, за счет большего на один числа выводов. Кроме того, для реализации инверторов на полумостовых схемах необходимы два типа модулей (модуль, в котором коллектор транзистора соединен с анодом диода, и модуль, в котором коллектор транзистора соединен с катодом диода), что увеличивает номенклатуру комплектующих изделий.
Третьим недостатком этих вентильно-индукторных двигателей, по сравнению с асинхронными и вентильными двигателями, имеющими три вывода, является большое число выводов (так у трехфазного вентильно-индукторного двигателя число выводов - шесть, у четырехфазного - восемь, у шестифазного - двенадцать).
Четвертым недостатком этого технического решения является то, что при монтаже инверторов на полумостовых схемах для вентильно-индукторных двигателей увеличиваются затраты на монтажные работы по сравнению с затратами на монтаж мостовых инверторов, применяемых для управления асинхронными и вентильными двигателями.
Наиболее близким к предлагаемому изобретению является низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов, содержащий статор с числом полюсов кратным шести и ротор с числом полюсов, меньшим числа полюсов статора на величину этой кратности (например, 


Недостатком этого технического решения является наличие в схеме управления замкнутого контура, состоящего из двух последовательно включенных диодов и двух обмоток фаз полюсов, сдвинутых на 180 электрических градусов, вследствие чего электродвижущая сила этих обмоток при уменьшении тока уравновешивается омическим сопротивлением обмоток и падением напряжения на диодах в прямом направлении, что обуславливает низкую скорость уменьшения тока при коммутации фаз и наличие, наряду с двигательными, тормозных моментов, которые уменьшают крутящий момент двигателя, увеличивают энергетические потери, что особенно сильно сказывается при высоких частотах вращения.
Вторым недостатком этого технического решения является необходимость применения наряду с мостовым инвертором шести дополнительных силовых диодов, что увеличивает цену инвертора, уменьшает коэффициент полезного действия за счет потерь в шести дополнительных силовых диодах и приводит к необходимости увеличения габаритных размеров за счет увеличения числа силовых элементов и площади радиатора охлаждения.
Целями предлагаемого изобретения являются уменьшение числа выводов вентильно-индукторного двигателя, уменьшение массогабаритных показателей, упрощение и увеличение коэффициента полезного действия инвертора.
Поставленные цели достигаются тем, что в известных шестифазных синхронно-реактивных двигателях, содержащих явнополюсные симметричные статор и ротор со статором, имеющим 12 сосредоточенных полюсов с обмотками, и ротором, имеющим 10 полюсов без обмоток, в предлагаемом изобретении угловая ширина полюсов статора равна 12 градусов, угловая ширина межполюсного расстояния статора равна 18 градусов, угловая ширина полюсов ротора равна угловой ширине межполюсного расстояния ротора и равна 18 градусам, причем обмотки противоположных полюсов с нечетными номерами питаются токами синусоидальной формы, сдвинутыми относительно друг друга на 60 электрических градусов, а обмотки полюсов с четными номерами оснащены двумя сосредоточенными обмотками, полный ток которых имеет синусоидальную форму и одинаковую амплитуду с токами обмоток нечетных полюсов, но сдвинут относительно них на 30 электрических градусов, причем обмотки нечетных противоположных полюсов соединены последовательно и соединены с четырьмя обмотками смежных полюсов, их начала соединены с выходами трехфазного мостового инвертора, управляемого релейно-токовым способом управления, а концы соединены между собой, образуя соединение в «звезду», соотношение числа витков обмоток нечетных полюсов и обмоток четных полюсов примерно равно 
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
- шестифазный синхронно-реактивный двигатель, содержащий явнополюсный симметричный статор и ротор со статором, имеющим 12 сосредоточенных полюсов с обмотками, и ротором, имеющим 10 полюсов без обмоток, угловая ширина полюсов статора равна 12 градусов, угловая ширина межполюсного расстояния статора равна 18 градусов, угловая ширина полюсов ротора равна угловой ширине межполюсного расстояния ротора и равна 18 градусам;
- обмотки противоположных полюсов с нечетными номерами питаются токами синусоидальной формы, сдвинутыми относительно друг друга на 60 электрических градусов, а полюса с четными номерами оснащены двумя сосредоточенными обмотками, полный ток которых имеет синусоидальную форму и одинаковую амплитуду с токами обмоток нечетных полюсов, но сдвинут относительно них на 30 электрических градусов, причем обмотки нечетных противоположных полюсов соединены последовательно и соединены с четырьмя обмотками смежных полюсов, а их начала соединены с выходами трехфазного мостового инвертора, управляемого релейно-токовым способом, а концы соединены между собой, образуя соединение в «звезду», соотношение числа витков обмоток нечетных полюсов и обмоток четных полюсов примерно равно 
Следовательно, заявленное техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения уменьшается число выводов двигателя, упрощается монтаж силового инвертора, уменьшается число и цена полупроводниковых приборов инвертора и увеличивается его коэффициент полезного действия.
Следовательно, заявленное техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, электропривода и электродвигателей.
Шестифазных вентильно-индукторных двигателей, содержащих явнополюсные симметричные статор и ротор со статором, имеющим 12 сосредоточенных полюсов с обмотками, и ротором, имеющим 10 полюсов без обмоток, с угловой шириной полюсов статора, равной 12 градусов, угловой шириной межполюсного расстояния статора, равной 18 градусов, угловой шириной полюсов ротора, равной угловой ширине межполюсного расстояния ротора и равной 18 градусам, с обмотками противоположных полюсов с нечетными номерами, питающимися токами синусоидальной формы, сдвинутыми по фазе относительно друг друга на 60 электрических градусов, и полюсами с четными номерами, оснащенными двумя сосредоточенными обмотками, полный ток которых имеет синусоидальную форму и одинаковую амплитуду с токами обмоток нечетных полюсов, но сдвинут относительно них по фазе на 30 электрических градусов, с обмотками нечетных противоположных полюсов, соединенными последовательно и соединенными с четырьмя обмотками смежных полюсов, начала которых соединены с выходами трехфазного мостового инвертора, управляемого релейно-токовым способом, а концы соединены между собой, образуя соединение в «звезду», с соотношением числа витков обмоток нечетных полюсов и обмоток четных полюсов, примерно равным 
Таким образом, указанные признаки обеспечивают заявленному техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 приведен шестифазный вентильно-индукторный двигатель с 12 полюсами статора и 10 полюсами ротора, управляемый трехфазным током синусоидальной формы. На фиг.1 обозначено: 1 - статор; 2 - обмотка полюса статора с нечетным номером; 3 - обмотки полюсов статора с четным номером; 4 - ротор; 5 - вал; 1-12 - номера полюсов статора; 1-10 - номера полюсов ротора; 18° - угловая ширина полюсов ротора и межполюсного расстояния ротора и статора; 12° - угловая ширина полюсов статора; iA, -iA, iB, -iB, iC, -iC - текущие значения токов обмоток соответствующих полюсов статора с нечетными номерами; iC-iA, iC-iB, iA-iB, iA-iC, iB-iC, iB-iA - текущие значения токов обмоток соответствующих полюсов статора с четными номерами.
На фиг.2 приведены схемы обмоток соответствующих фаз шестифазного вентильно-индукторного двигателя с 12 полюсами статора и 10 полюсами ротора, управляемого трехфазным током синусоидальной формы. На фиг.2 обозначено: 1-12 - номера полюсов статора.
На фиг.3 приведены схемы соединения обмоток шестифазного вентильно-индукторного двигателя с 10 полюсами ротора и 12 полюсами статора, управляемого трехфазным током синусоидальной формы. На фиг.3 обозначено: 1-12 - номера полюсов статора, на которых размещены соответствующие обмотки, в соответствии с фиг.1, A, B, C - выводы обмоток полюсов статора, подсоединенные к выходам трехфазного инвертора.
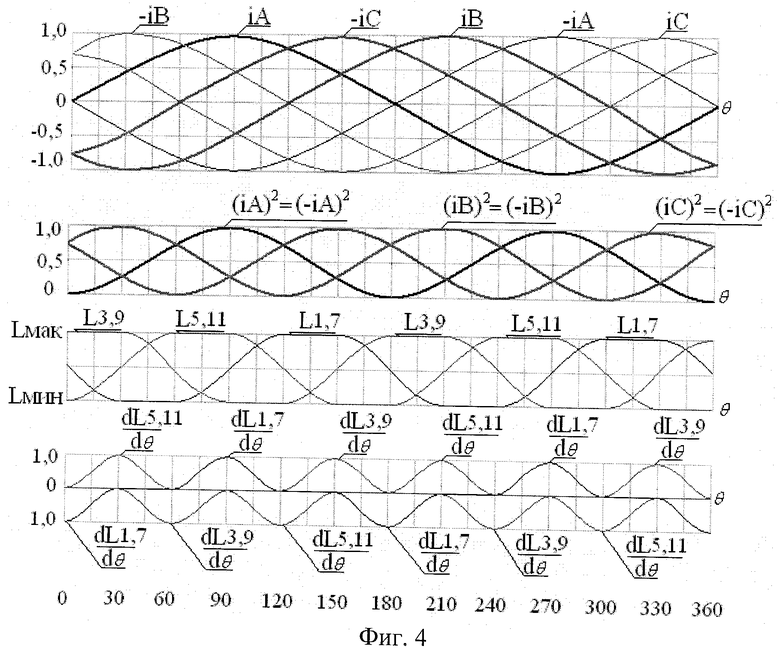
На фиг.4 приведены диаграммы работы нечетных полюсов шестифазного вентильно-индукторного двигателя с 12 полюсами статора и 10 полюсами ротора, управляемого трехфазным током синусоидальной формы, в относительных единицах. На фиг.4 обозначено: iA, iB, iC, -iA, -iB, -iC - текущие значения токов обмоток нечетных полюсов, (iA)2=(-iA)2, (iB)2=(-iB)2=(iB)2, (iC)2=(-iC)2 - текущие значения токов нечетных полюсов в квадрате; L1,7, L3,9, L5,11 - текущие значения индуктивностей нечетных полюсов; 


На фиг.5 приведены диаграммы работы четных полюсов шестифазного вентильно-индукторного двигателя с 12 полюсами статора и 10 полюсами ротора, управляемого трехфазным током синусоидальной формы, в относительных единицах. На фиг.4 обозначено: iC-iB, iA-iB, iA- iC, iB-iC, iB-iA, iC-iA - текущие значения токов обмоток нечетных полюсов, (iC-iB)2=(iB-iC)2, (iA-iB)2=(iB-iA)2, (iA-iC)2=(iC-iA)2 - текущие значения токов обмоток четных полюсов в квадрате; L2,8, L4,10, L6,12 - текущие значения индуктивностей четных полюсов; 


На фиг.6 приведена структурная схема регулятора момента шестифазного вентильно-индукторного двигателя с 12 полюсами статора и 10 полюсами ротора, управляемого трехфазным током синусоидальной формы. На фиг.6 обозначено: R - резистор, задающий амплитуду и направление вращения вектора заданного тока; +U, -U - напряжения питания резистора, задающего амплитуду и направление вращения вектора заданного тока; I3 - заданный вектор тока; БИЛ - блок изменения полярности; -1 - коэффициент передачи блока изменения полярности; ПА, ПВ, ПС - переключатели полярностей тока задания соответствующих фаз; ЦАПА, ЦАПВ, ЦАПС - цифроаналоговые преобразователи соответствующих фаз; ПЗУА, ПЗУВ, ПЗУС - постоянные запоминающие устройства соответствующих фаз; ДП - датчик положения ротора вентильно-индукторного двигателя; БСА, БСВ, БСС - блоки сравнения текущих значений заданных токов и токов обмоток соответствующих фаз; iA, iB, iC - текущие значения токов обмоток соответствующих фаз; К1-К6 -компараторы с гистерезисом; Б1, Б2, Б3 -блоки с коэффициентом передачи равным -1, изменяющие полярность выходного напряжения компараторов К2, К4, К6; VT1-VT6 - силовые транзисторы; VD1-VD6 - силовые диоды; ДТ1-ДТ3 - датчики тока; Е - источник постоянного напряжения; С - конденсатор источника постоянного напряжения; ВИД - вентильно-индукторный двигатель; А, В, С - фазы инвертора; БСОВ - блок сравнения текущих значений заданного тока и тока обмотки возбуждения; 11-12 номера полюсов статора с соответствующими обмотками.
Регулятор момента шестифазного вентильно-индукторного двигателя с 12 полюсами статора и 10 полюсами ротора, управляемого трехфазным током синусоидальной формы, работает следующим образом: резистором R задается амплитуда и полярность вектора тока Iз, БИП изменяет полярность Iз на противоположную. Сигналы различной полярности, пропорциональные Iз, подаются на входы переключателей соответствующих фаз ПА, ПВ, ПС, на управляющие входы которых подаются сигналы с выходов постоянных запоминающих устройств соответствующих фаз ПЗУА, ПЗУВ, ПЗУС, соединенных с датчиком положения ротора. Сигналы с ПА, ПВ, ПС, и ПЗУА, ПЗУВ, ПЗУС подаются на входы цифроаналоговых преобразователей соответствующих фаз ЦАПА, ЦАПВ, ЦАПС, на выходах которых формируется трехфазное синусоидальное напряжение, амплитуда которого пропорциональна Iз, частота - пропорциональна частоте вращения ротора, при изменении полярности Iз при помощи резистора R происходит сдвиг токов фаз на 180 электрических градусов. Заданные токи фаз сравниваются при помощи блоков сравнения текущих значений заданных токов и токов обмоток соответствующих фаз БСА, БСВ, БСС, причем сигналы, пропорциональные токам фаз, поступают с трех датчиков токов ДТ1-ДТ3, а сигналы, пропорциональные заданным токам, поступают с выходов трех цифроаналоговых преобразователей ЦАПА, ЦАПВ, ЦАПС, а их разность поступает на входы компараторов с гистерезисом К1-К6, которые совместно с блоками, имеющими коэффициент передачи, равный -1 - Б1, Б2, Б3 и трехфазным инвертором, выполненном на транзисторах VT1-VT6 и на диодах VD1-VD6, формируют трехфазные токи, средняя величина которых имеет синусоидальную форму и амплитуду пропорциональную I3. Фазы токов трехфазного инвертора сдвинуты на 120°, так как момент, который развивает одна пара противоположных полюсов, равен 


i2=iC-iA=Imax[sinθ+240°)-sinθ]=-Imax×2×0,866cos(θ+120°)=-1,732Imaxcos(θ+120°).
Для того чтобы максимальные значения полного тока обмоток четных и нечетных полюсов были одинаковы, необходимо, чтобы число витков каждой обмотки четных полюсов были 

Так как момент, развиваемый каждой парой противолежащих полюсов, равен 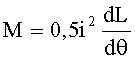


Таким образом, использование в электроприводах различных механизмов и исполнительных устройствах автоматических систем шестифазных вентильно-индукторных двигателей с 12 полюсами статора и 10 полюсами ротора, содержащих явнополюсные симметричные статор и ротор со статором, имеющим 12 сосредоточенных полюсов с обмотками, и ротором, имеющим 10 полюсов без обмоток, с угловой шириной полюсов статора, равной 12 градусов, угловой шириной межполюсного расстояния статора, равной 18 градусов, угловой шириной полюсов ротора, равной угловой ширине межполюсного расстояния ротора и равной 18 градусам, с обмотками противоположных полюсов с нечетными номерами, питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на 60 электрических градусов, а обмотками полюсов с четными номерами, оснащенными двумя сосредоточенными обмотками, суммарный ток которых имеет синусоидальную форму и одинаковую амплитуду с токами обмоток нечетных полюсов, но сдвинут относительно них на 30 электрических градусов, и обмотками нечетных противоположных полюсов, соединенными последовательно и соединенными с четырьмя полуобмотками смежных полюсов, с началами которых соединены выходы трехфазного мостового инвертора, управляемого релейно-токовым способом, с концами соединенными между собой, образующими соединение в «звезду», с соотношением числа витков обмоток нечетных полюсов и полуобмоток четных полюсов, примерно равным 
Использование предлагаемого технического решения в электроприводах различных механизмов и исполнительных устройствах обеспечит повышение эффективности и качества работы этих устройств.



Изобретение относится к области электротехники и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем. Технический результат, достигаемый при использовании настоящего изобретения, состоит в уменьшении суммарной мощности силовых полупроводниковых приборов инвертора при одновременном обеспечении упрощения его монтажа и уменьшения числа выводов шестифазного вентильно-индукторного двигателя до трех. Указанный технический результат в данном изобретении достигается за счет соблюдения определенных соотношений угловых размеров полюсов ротора двигателя и его статора, четные полюса которого оснащены одной сосредоточенной обмоткой, а нечетные - двумя сосредоточенными обмотками, которые включены определенным образом. Кроме того, в предлагаемом двигателе полные токи обмоток фаз содержат в своем составе только первую гармонику и не содержат высших гармоник, а питание двигателя осуществляется тремя синусоидальными токами с помощью трехфазного мостового инвертора, который управляется релейно-токовым способом. 6 ил.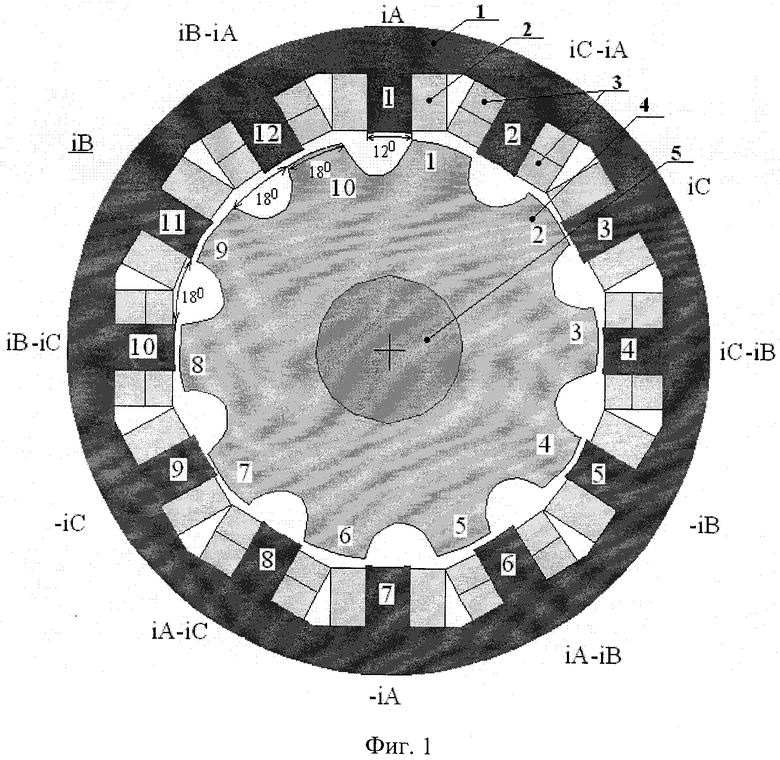
Шестифазный вентильно-индукторный двигатель, управляемый трехфазным током синусоидальной формы, содержащий явнополюсный симметричный статор, имеющий 12 сосредоточенных полюсов с обмотками и ротором, имеющим 10 полюсов без обмоток, содержащий схему управления, силовой инвертор и датчик положения ротора, отличающийся тем, что угловая ширина полюсов статора равна 12 градусам, угловая ширина межполюсного расстояния статора равна 18 градусам, угловая ширина полюсов ротора равна угловой ширине межполюсного расстояния ротора и равна 18 градусам, с обмотками противоположных полюсов с нечетными номерами, питающимися токами синусоидальной формы, сдвинутыми по фазе относительно друг друга на 60 электрических градусов, и полюсами с четными номерами, оснащенными двумя сосредоточенными обмотками, полный ток которых имеет синусоидальную форму и одинаковую амплитуду с токами обмоток нечетных полюсов, но сдвинут относительно них по фазе на 30 электрических градусов, причем обмотки нечетных противоположных полюсов соединены последовательно и соединены с четырьмя обмотками смежных полюсов, а их начала соединены с выходами трехфазного мостового инвертора, управляемого релейно-токовым способом, а концы соединены между собой, образуя соединение в «звезду», с соотношением числа витков обмоток нечетных полюсов и обмоток четных полюсов примерно равным 
| ПЛАХ Г.К | |||
| и др | |||
| Низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов | |||
| Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| - СПб., 18-21 сентября 2007 | |||
| МЕХАТРОННАЯ СИСТЕМА С ШЕСТИФАЗНЫМ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2426211C1 |
| РЕВЕРСИВНЫЕ ВЕНТИЛЬНО-ИНДУКТОРНЫЕ ДВИГАТЕЛИ С ЧИСЛОМ ФАЗ, БОЛЬШИМ ИЛИ РАВНЫМ ТРЕМ, И ДВУХПОЛЮСНЫМ РОТОРОМ | 2009 |
|
RU2396674C1 |
| БЕСКОНТАКТНАЯ ИНДУКТОРНАЯ ВЕНТИЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2277284C2 |

