Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к управлению двигателями транспортных средств, в частности к регулированию крутящего момента двигателя после завершения процесса включения сцепления. В частности, настоящее изобретение относится к транспортным средствам, которые имеют автоматическую муфту и в которых запрос крутящего момента водителем к блоку управления/двигателю автоматически ограничивается в ходе процесса включения сцепления, и регулирование крутящего момента возвращается к водителю как функция степени нажатия на педаль акселератора.
Уровень техники
Современные двигатели транспортных средств обычно снабжаются блоками управления двигателем, которые регулируют согласно положению, до которого нажата педаль акселератора, крутящий момент, который выдает двигатель транспортного средства. Для транспортных средств, снабженных автоматической муфтой, распространено ограничение крутящего момента двигателя автоматически в ходе процесса включения сцепления. Педаль акселератора тогда служит, прежде всего, педалью сцепления в том смысле, что она главным образом воздействует на процесс включения сцепления. Крутящий момент двигателя ограничен в течение времени, когда сцепление проскальзывает, чтобы облегчить процесс включения сцепления, и положение нажатия на педаль акселератора тогда не соответствуют фактическому крутящему моменту, выдаваемому двигателем. Ограничение крутящего момента применяется для достижения более комфортабельного включения сцепления и минимизации износа различных механических частей сцепления. Приведение в движение транспортного средства с автоматической муфтой, таким образом, не включает использование всего крутящего момента, который водитель требует от двигателя, нажимая на педаль акселератора.
Когда муфта прекращает проскальзывать, то есть, когда проскальзывание или относительная скорость в муфте нулевая или близка к нулю, процесс включения сцепления расценивается как законченный. Муфта обычно нагружена пружиной, и обычно существует определенное малое относительное положительное или отрицательное перемещение между маховиком и дисками фрикционной муфты. По этой причине проскальзывание редко будет абсолютно нулевым. Когда процесс включения сцепления закончен, регулирование крутящего момента, выдаваемого двигателем, возвращается от управления посредством автоматического регулирования «ограниченным крутящим моментом двигателя» к управлению водителем через положение нажатия на педаль акселератора.
Желательно, чтобы водитель ощущал, что есть взаимосвязь между задействованной мощностью и выдаваемым крутящим моментом двигателя и что транспортное средство как можно скорее после процесса включения сцепления должно вести себя так, как если бы не было ограничения крутящего момента двигателя, то есть степень нажатия на педаль акселератора должна быть пропорциональна крутящему моменту, выдаваемому двигателем.
Однако когда процесс включения сцепления закончен и муфта прекращает проскальзывать, обычно существует разность или «погрешность» между «затребованным водителем крутящим моментом двигателя» и «ограниченным крутящим моментом двигателя», генерируемым блоком управления. Поскольку крутящий момент, выдаваемый двигателем, контролировался «ограниченным крутящим моментом двигателя», погрешность должна быть так или иначе устранена, чтобы позволить водителю восстановить полный контроль и управлять крутящим моментом двигателя при помощи педали акселератора, как при нормальном управлении.
Существуют различные способы устранения погрешности или разности. Известный способ возвращения регулирования к «затребованному водителем крутящему моменту двигателя» после того, как муфта прекращает проскальзывать, состоит в простом постепенном увеличении величины или линейно от текущего «ограниченного крутящего момента двигателя» к «затребованному крутящему моменту двигателя». Это, к сожалению, дает нежелательные эффекты, например, в том, что транспортное средство постепенно ускоряется без желания водителя и без изменения водителем положения педали акселератора.
Это может влечь за собой проблемы, когда водитель должен вести транспортное средство с точностью, например, приводя транспортное средство в движение плавно в ситуациях, когда водитель считает это желательным или необходимым. Это может происходить, например, на скользких дорожных поверхностях или если транспортное средство должно сдавать назад к погрузочной площадке или в некоторой другой подобной ситуации. Если дорожная поверхность скользкая, и транспортное средство движется, например, на подъеме, и крутящий момент двигателя увеличивается сам по себе, легко понять, что транспортное средство может начать скользить или свободно буксовать и скользить неуправляемым образом. С тяжело загруженным транспортным средством это может быть весьма опасно и может привести к аварийной ситуации.
Таким образом, с известными системами для «затребованного крутящего момента двигателя», применяемого водителем при помощи педали акселератора, он может изменяться факторами, которые не относятся к его/ее непосредственному управлению. Такие факторы включают частоту вращения двигателя и турбодавление. Это относится к тому факту, что тяжелые транспортные средства обычно имеют дизельные двигатели с такой характеристикой крутящего момента, что они не являются мощными при низких частотах вращения двигателя, то есть частотах вращения двигателя, применяемых при приведении транспортного средства в движение, но являются более мощными при частотах вращения двигателя, применяемых при нормальном движении. Когда частота вращения двигателя постепенно увеличивается при ускорении транспортного средства после того, как муфта прекращает проскальзывать, крутящий момент, выдаваемый двигателем, увеличивается, несмотря на положение педали акселератора, не изменяемое водителем.
Известны различные предшествующие решения для управления крутящим моментом двигателя в транспортных средствах с автоматическими муфтами.
Например, патент США 4081065 относится к способу приведения транспортного средства в движение из неподвижного состояния. Этот способ предусматривает управление процессом скольжения в ходе сцепления механических частей автоматической муфты. Крутящий момент двигателя, таким образом, регулируется как функция нажатия на педаль акселератора, что означает, что водитель способен управлять процессом. Однако способ относится к регулированию в ходе фактического процесса включения сцепления и включает прямую зависимость между положением педали акселератора и крутящим моментом двигателя. Способ согласно настоящему изобретению относится к управлению крутящим моментом двигателя после того, как процесс включения сцепления закончен и касается разности между «затребованным крутящим моментом двигателя» и «ограниченным крутящим моментом двигателя».
Патент Великобритании 2225076 относится к способу достижения увеличенного крутящего момента и предоставления водителю лучшего контроля в ходе управления. Этот способ предусматривает использование кинетической энергии вращения двигателя в ходе работы и возвращает ее ведущим колесам, когда происходит работа муфты/переключение передач. Скорость возвращения энергии относится к положению педали акселератора таким образом, что у водителя будет ощущение хорошего контроля, и крутящий момент будет изменяться в соответствии с положением педали акселератора. Эта технология работает, только пока муфта проскальзывает, то есть когда существует относительная скорость в муфте. Напротив, объектом настоящего изобретения является только восстановление регулирования, когда проскальзывания в муфте нет, то есть когда проскальзывание близко к нулю.
Патент США 5206805 относится к способу достижения более эффективного сцепления муфты на основании того, что при определенных обстоятельствах крутящий момент, генерируемый транспортным средством, может вызывать достижение двигателем нежелательных рабочих уровней. Система управляет частотой вращения двигателя посредством регулирования силы сцепления муфты в ходе скользящей фазы сцепления муфты. Сила сцепления регулируется на основании предопределенной модели, основанной на затребованном водителем крутящем моменте и проскальзывании муфты. Настоящее изобретение предусматривает управление крутящим моментом двигателя, когда процесс включения сцепления закончен и муфта, таким образом, не проскальзывает.
Таким образом, в уровне техники по существу описаны различные способы управления крутящим моментом двигателя в ходе фактического процесса включения сцепления, тогда как настоящее изобретение не предусматривает воздействие на крутящий момент в ходе процесса включения сцепления. Состояние уровня техники не указывает на какой-либо способ, который обеспечивает управление крутящим моментом двигателя на основании текущей зависимости между «ограниченным крутящим моментом двигателя» и «затребованным водителем крутящим моментом».
Раскрытие изобретения
Задачей изобретения является решение указанных выше проблем и создание способа, который предоставляет водителю после завершения процесса включения сцепления лучшее управление крутящим моментом, выдаваемым двигателем к ведущим колесам транспортного средства, таким образом, что он/она ощущает соответствие между задействованной мощностью и крутящим моментом, выдаваемым двигателем.
Другой задачей изобретения является создание способа, который возвращает регулирование крутящего момента двигателя от системы управления к педали акселератора без неудобств, связанных с состоянием известного уровня техники, таким образом, что «ограниченный крутящий момент двигателя» быстро приспосабливается к тому же уровню, как и «затребованный водителем крутящий момент», после того, как система управления ограничила крутящий момент двигателя в ходе процесса включения сцепления в транспортном средстве с автоматической муфтой.
Другой задачей изобретения является создание способа, который после процесса включения сцепления обеспечивает улучшенное управление двигателем транспортного средства, например, при приведении транспортного средства в движение на скользкой дорожной поверхности или выполнении какого-либо другого точного маневрирования транспортного средства и который улучшает контроль водителем величины крутящего момента, выдаваемого двигателем.
Другой задачей изобретения является создание способа, который предотвращает самопроизвольное увеличение крутящего момента двигателя без изменения водителем положения нажатия на педаль акселератора.
Вышеупомянутые и другие задачи достигаются согласно изобретению благодаря способу, компьютерной программе и машиночитаемому носителю согласно признакам, указанным в пунктах 1, 9 и 10.
Таким образом, изобретение относится к способу регулирования крутящего момента двигателя, который позволяет водителю осуществлять контроль крутящего момента, который передается к ведущим колесам транспортного средства, даже немедленно после того, как процесс включения сцепления был выполнен. Изобретение подразумевает, что, только когда водителем осуществляется изменение положения педали акселератора, изменяется крутящий момент, выдаваемый двигателем. Изменение крутящего момента двигателя осуществляется согласно изменению положения педали акселератора и вычисляется как разность между «затребованным крутящим моментом двигателя» и «ограниченным крутящим моментом двигателя», разделенная на неиспользованную величину нажатия на педаль акселератора. Таким образом, не абсолютное положение педали акселератора определяет то, какой крутящий момент будет выдавать двигатель, и пока педаль акселератора остается в одном положении, двигатель будет выдавать по существу постоянный крутящий момент.
Другие признаки и преимущества изобретения указаны в приведенном ниже более подробном описании изобретения и показаны на прилагаемых чертежах и в других пунктах.
Краткое описание чертежей
Изобретение описано ниже более подробно в форме некоторых предпочтительных примеров вариантов осуществления изобретения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - график примера того, как различные параметры в системе управления взаимодействуют в ходе регулирования согласно изобретению и при нажатии на педаль акселератора.
Фиг.2 - блок-схема этапов центрального процесса согласно изобретению.
Фиг.3 - схематичная блок-схема узлов транспортного средства, которые участвуют в осуществлении способа согласно изобретению.
Описание примеров предпочтительных вариантов осуществления изобретения
Таким образом, изобретение относится к способу управления и регулирования двигателей транспортных средств, в частности регулирования крутящего момента, выдаваемого двигателями транспортных средств, которые имеют автоматическую муфту, при этом система управления транспортного средства автоматически ограничивает крутящий момент двигателя, затребованный водителем в ходе процесса включения сцепления, и регулирование после того, как процесс включения сцепления закончен, возвращается водителю и будет производиться согласно степени нажатия на педаль акселератора.
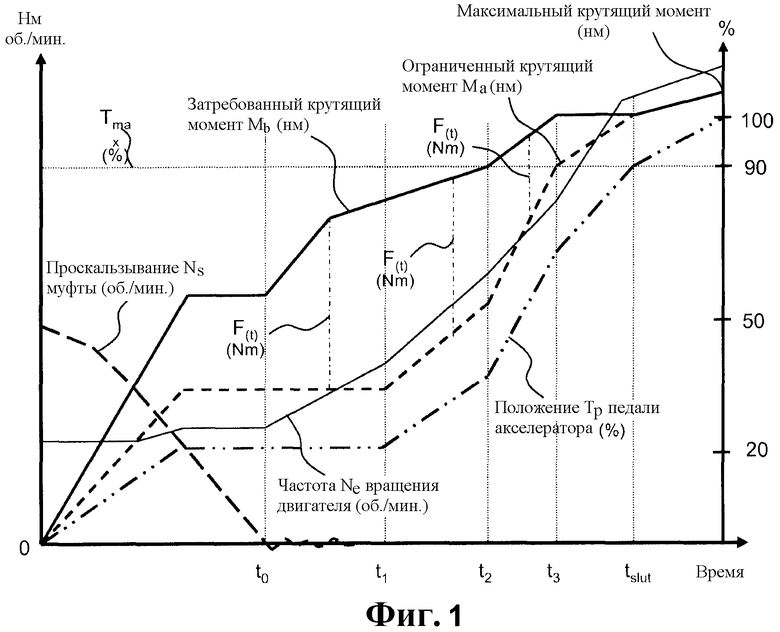
На фиг.1 изображен график того, как взаимодействуют различные параметры двигателя, муфты и коробки передач в ходе регулирования крутящего момента двигателя согласно изобретению. Кривые представляют величины различных параметров в каждый момент как функцию времени, при этом их величины нанесены по вертикальной оси и время - по горизонтальной оси. Кривые представляют «ограниченный крутящий момент двигателя» Ма (предел затребованного крутящего момента двигателя), который является запросом к блоку управления двигателя, чтобы ограничить движущую силу/крутящий момент двигателя, «затребованный крутящий момент двигателя» Mb (крутящий момент двигателя, затребованный водителем), который является крутящим моментом, желаемым/запрашиваемым водителем посредством нажатия на педаль акселератора, положение Tp педали акселератора в процентах, частота Ne вращения двигателя и «проскальзывание» Ns муфты, которое является относительной скоростью в муфте транспортного средства.
Погрешность F(t) является разностью, которая изменяется в течение времени и должна быть устранена как можно быстрее после завершения процесса включения сцепления для достижения результата согласно изобретению. Погрешность F(t) является разностью между «затребованным крутящим моментом двигателя» Mb и «ограниченным крутящим моментом двигателя» Ms.
В момент Т0 времени график показывает, что муфта прекращает проскальзывать и «проскальзывание» Ns является нулевым или очень близким к нулю. В этой ситуации двигатель начинает увеличивать его частоту вращения, в результате чего «затребованный водителем крутящий момент двигателя» Mb также начинает увеличиваться. «Ограниченный крутящий момент двигателя» Ма, который является крутящим моментом, фактически выдаваемым двигателем, будет оставаться постоянным, пока водитель удерживает педаль акселератора в одном положении.
Если, например, водитель начинает отпускать педаль акселератора, разность процента между «ограниченным крутящим моментом двигателя» Ма и «затребованным крутящим моментом двигателя» Mb сохраняется, и когда педаль акселератора полностью отпущена, «ограниченный крутящий момент двигателя» Ма и «затребованный крутящий момент двигателя» Mb становятся равными нулю или близкими к нулю. Процесс вычисления работает подобным образом, когда педаль акселератора нажата и когда она отпущена, и ограничение крутящего момента также заканчивается, когда педаль акселератора полностью отпущена. Крутящий момент двигателя, таким образом, постепенно уменьшается, когда водитель начинает отпускать педаль акселератора. Вычисление для ограничения крутящего момента при отпускании педали акселератора частично включает другие предельные значения и не будет описано здесь более подробно.
Педаль акселератора транспортного средства может регулироваться механически между двумя крайними положениями, когда она полностью отпущена, то есть когда на нее вообще не оказывается воздействие, и когда она полностью нажата, и, таким образом, возможные положения могут быть обозначены как степени нажатия в пределах от 0 до 100%. Педаль акселератора может быть откалибрована так, чтобы активный, управляемый диапазон содержал, например, все положения между 10 и 90%, то есть составлял «диапазон регулирования» механически возможного хода педали. 10% в таком случае являются минимальным пределом Tmin, и 90% являются максимальным пределом Tmax. В более высоком процентном положении педали акселератора, то есть между 90 и 100%, «ограниченный крутящий момент двигателя» Ма подвергается воздействию изменения положения педали акселератора, так как ограничение крутящего момента двигателя прекращается в положении Tp педали акселератора, составляющем 90 процентов. Однако положения педали акселератора свыше 90% воздействуют на/увеличивают «затребованный водителем крутящий момент двигателя» Mb, который в пределах диапазона фактически управляет крутящим моментом двигателя.
Диапазон регулирования педали акселератора разделен общепринятым промышленным стандартом на 250 этапов. Если используется весь диапазон или ход 0-100%, каждый этап соответствует изменению положения педали акселератора на 0,4%. Каждый раз, когда положение Tp педали акселератора изменяется, по меньшей мере, на один этап, «ограниченный крутящий момент двигателя» Ма изменяется в соответствующей степени. Когда педаль акселератора будет нажата до ее максимально нижнего положения Tmax, погрешность F(t) будет нулевой или фактически нулевой и величина для «ограниченного крутящего момента двигателя» Ма должна соответствовать величине для «затребованного крутящего момента двигателя» Mb.
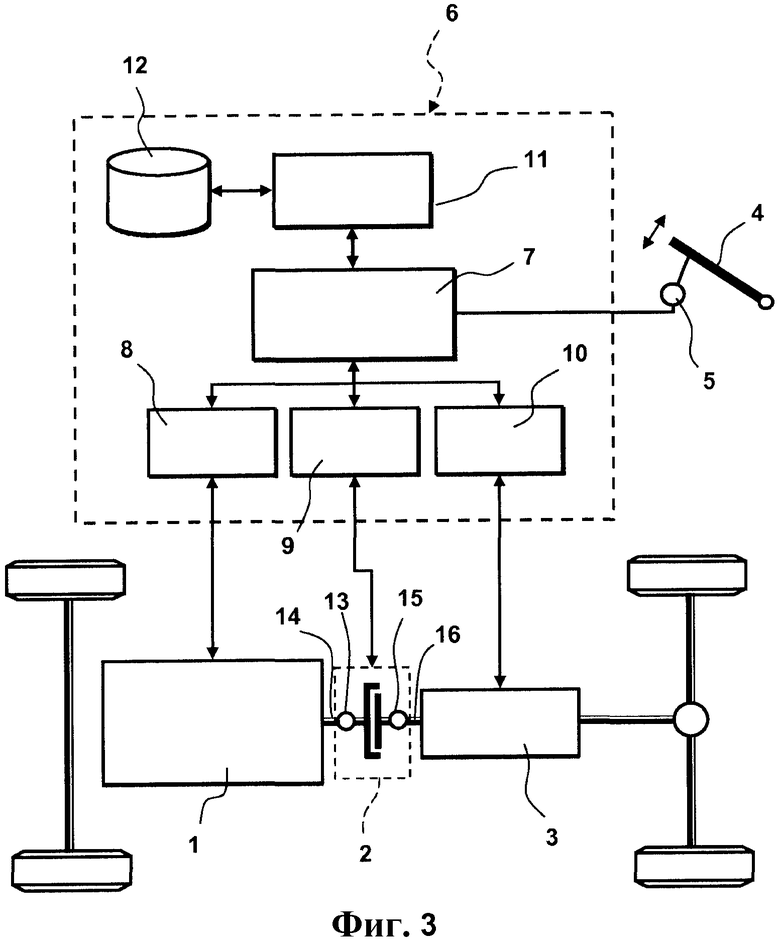
На фиг.2 показана блок-схема этапов центрального процесса, которые выполняются после того, как процесс включения сцепления закончен, и сразу при обнаружении изменения положения Tp педали акселератора. Тот факт, что процесс включения сцепления закончен, устанавливается по тому, что «проскальзывание» Ns, то есть относительная скорость в муфте, является нулевой или очень близкой к нулю. Это определяется, например, сравнением частоты вращения двигателя на выходном валу двигателя со скоростью на входном валу коробки передач. Когда разность скоростей равна нулю или очень близка к нулю, процесс включения сцепления расценивается как законченный. В ходе процесса включения сцепления крутящий момент, выдаваемый двигателем, регулируется системой управления двигателем на основании «ограниченного крутящего момента двигателя» Ма и, таким образом, не «затребованного крутящего момента двигателя» Mb.
Этапы процесса можно подытожить следующим образом:
100. Определение того, был ли инициирован новый процесс включения сцепления. Если да, переход к следующему этапу процесса.
101. Проверка того, прекращено ли проскальзывание муфты, то есть является ли «проскальзывание» Ns в муфте нулевым. Если да, переход к следующему этапу процесса.
102. Получение текущих величин для «затребованного крутящего момента двигателя» Mb и «ограниченного крутящего момента двигателя» Ма. «Затребованный крутящий момент двигателя» Mb получают от блока управления двигателем, и на него воздействует, среди прочего, положение Tp педали акселератора. «Ограниченный крутящий момент двигателя» Ма генерируется первоначально блоком управления двигателем в ходе процесса включения сцепления, и, таким образом, его получают первоначально от блока управления двигателем. После этого «ограниченный крутящий момент двигателя» Ма вычисляется согласно этому процессу и сохраняется в памяти.
103. Сравнение «ограниченного крутящего момента двигателя» Ма с «затребованным крутящим моментом двигателя» Mb. Если разность вращающих моментов ниже заданного предельного значения, например ниже 10 нм, разность оценивается как настолько малая, что регулирование системы «ограниченного крутящего момента двигателя» Ма относительно «затребованного крутящего момента двигателя» Mb заканчивается, и процесс возвращается к этапу 100 процесса. Управление крутящим моментом двигателя, таким образом, переключается на влияние положения Tp нажатия на педаль акселератора. Это продолжается, пока не начнется новый процесс включения сцепления. Если разность между указанными величинами больше, чем заданное предельное значение, происходит переход к следующему этапу процесса.
104. Определение изменения Td положения педали акселератора. Когда изменение, по меньшей мере, одного этапа имеет место, осуществляется распознавание изменения и происходит переход к следующему этапу процесса. Только изменение положения педали акселератора будет вызывать изменение «ограниченного крутящего момента двигателя» Ма.
105. Вычисление погрешности F. Погрешность F вычисляется как разность крутящего момента между «затребованным крутящим моментом двигателя» Mb и «ограниченным крутящим моментом двигателя» Ма. Величина F сохраняется в памяти.
106. Вычисление остающегося неиспользованным нажатия TL на педаль акселератора. Неиспользуемое нажатие TL на педаль акселератора соответствует разности между максимальным положением Tmax педали акселератора и текущим положением педали акселератора.
107. Вычисление интенсификации Tg действия педалью акселератора. Ее вычисляют как погрешность F, разделенную на неиспользуемое нажатие TL на педаль акселератора.
108. Вычисление необходимого изменения Md «ограниченного крутящего момента двигателя» для устранения погрешности F при максимальном нажатии Tmax на педаль акселератора. Это вычисляется как интенсификация Tg педали акселератора, умноженная на изменение Td положения педали акселератора.
109. Вывод самой последней расчетной и сохраненной величины для «ограниченного крутящего момента двигателя» Ма.
110. Вычисление нового «ограниченного крутящего момента двигателя» Ма посредством применения к предыдущему «ограниченному крутящему моменту двигателя» Ма необходимого изменения Md «ограниченного крутящего момента двигателя». Новая величина для «ограниченного крутящего момента двигателя» Ма сохраняется в памяти.
111. Передача блоку управления двигателем текущей величины для «ограниченного крутящего момента двигателя» Ма.
112. Управление двигателем таким образом, чтобы выдавался крутящий момент, соответствующий расчетному «ограниченному крутящему моменту двигателя» Ма. После этого осуществляется возвращение к этапу 102 процесса.
Этапы процесса, таким образом, выполняются от 100 до 112 и продолжаются после этого циклом между 102 и 112, пока «ограниченный крутящий момент двигателя» Ма не достигает величины «затребованного крутящего момента двигателя» Mb.
Вычисление текущей величины для «ограниченного крутящего момента двигателя» Ма также может быть получено следующей формулой:

Следующий практический пример основан на способе согласно изобретению. Если немедленно после того, как процесс включения сцепления закончен, водитель нажимает на педаль акселератора, например, на 40 процентов, погрешность F вычисляется посредством взятия и вычитания друг из друга текущих величин для «ограниченного крутящего момента двигателя» Ма и «затребованного крутящего момента двигателя» Mb. Полученная погрешность F должна быть нулевой, когда водитель нажимает на педаль акселератора полностью, то есть до максимального положения Tmax педали акселератора, которое, в случае, обозначенном как Tslut, соответствует 90-процентному положению педали акселератора. Если погрешность F составляет, например, 100 нм, она должна, таким образом, уменьшаться с увеличением нажатия на педаль акселератора. Так как положение педали акселератора 90% составляет максимальное положение Tmax и 40% составляет текущее положение Tp педали акселератора, результатом является неиспользуемое нажатие TL на педаль акселератора, составляющее 50 процентов. Таким образом, полная погрешность F, составляющая 100 нм, должна быть распределена по неиспользуемому нажатию TL педали акселератора, составляющему 50 процентов. Для каждого процента, на который водитель нажимает на педаль акселератора, «ограниченный крутящий момент двигателя» Ма должен увеличиваться на 2 нм.
Вычисление и изменение «ограниченного крутящего момента двигателя» Ма производятся непрерывно многократно, пока значение не повысится до величины «затребованного крутящего момента двигателя» Mb. В ходе процесса вычисления «затребованный крутящий момент двигателя» Mb может увеличиваться сам по себе в результате увеличения частоты вращения двигателя, увеличения турбодавления или по какой-либо другой причине, в результате которой полная погрешность F может внезапно увеличиваться, например, до 120 нм вместо 100 нм. Это влечет за собой изменение величины Tg интенсификации на процент изменения Td положения педали акселератора в процессе вычисления. Это относится к такому случаю, что, когда водитель нажимает на педаль акселератора до 90%, погрешность F должна быть нулевой, и, таким образом, величина для «ограниченного крутящего момента двигателя» Ма должна быть равной величине для «затребованного крутящего момента двигателя» Mb.
Если водитель удерживает педаль акселератора неподвижной, то крутящий момент, выдаваемый двигателем, таким образом, не будет увеличиваться. Однако погрешность F может увеличиваться. Это показано на фиг.1 между моментами t0 и t1 времени. Изменение «ограниченного крутящего момента двигателя» Ма, таким образом, происходит, только когда положение педали акселератора изменяется, как показано в момент t1 на фиг.1. Увеличение относится к изменению Td положения педали акселератора. Это позволяет водителю воздействовать на то, когда и насколько крутящий момент двигателя может увеличиваться. Если нажатие на педаль акселератора вызывает увеличение крутящего момента, которое больше, чем заданная производная, как показано в момент t2 на графике, то увеличение крутящего момента будет ограничено максимальным числом нм в секунду. Это максимальное увеличение крутящего момента может изменяться, например, в зависимости от того, является ли дорожная поверхность скользкой или нет. Одним путем для автоматического получения системой указания относительно того, является ли дорожная поверхность скользкой и, следовательно, для применения более низкого максимального увеличения крутящего момента, например, является определение того, что включена блокировка дифференциала транспортного средства, когда транспортное средство приводится в движение.
На фиг.3 схематично показана блок-схема узлов, которые формируют часть системы, позволяющую осуществить способ согласно изобретению. Транспортное средство схематично изображено с двигателем 1, муфтой 2 и коробкой 3 передач. Педаль 4 акселератора, снабженная датчиком 5, например потенциометром, выполнена с возможностью определения мощности, затребованной водителем. Блок 6 управления содержит центральный электронный блок (электронный управляющий блок) 7, соединенный с блоком 8 управления двигателем, блоком 9 управления сцеплением и блоком 10 управления коробкой передач. Вычислительный блок 11 выполнен с возможностью осуществления вычислений согласно способу, соответствующему изобретению, и принимает данные из памяти 12 и от других частей блока 6 управления. Относительная скорость в муфте 2 определяется, например, при помощи датчика 13, расположенного на выходном валу 14 двигателя, и датчика 15, расположенного на входном валу 16 коробки 3 передач.
Это, в целом, представляет тот случай, когда сигналы положения Tp педали акселератора, частоты Ne вращения двигателя, скольжения Ns и «затребованного крутящего момента двигателя» Mb должны быть доступными для блока, который выполняет вычисление согласно изобретению. Однако нет какого-либо требования выполнения вычисления в конкретной части транспортного средства. Ключевое требование состоит в том, что блок имеет доступ к сигналам и может одновременно самостоятельно ограничивать крутящий момент двигателя или передавать управляющий сигнал блоку, который может прямо ограничивать крутящий момент двигателя.
В альтернативном примере варианта осуществления изобретения вычисление согласно изобретению выполняется блоком 10 управления коробкой передач, когда также используется внутренняя память, обычно находящаяся в блоке управления 10.
Сигнал от педали 4 акселератора, который представляет положение педали акселератора, поступает в центральный электронный блок 7, который затем обрабатывает и передает сигнал блоку 8 управления двигателем и блоку 10 управления коробкой передач. Блок 8 управления двигателем вычисляет «затребованный крутящий момент двигателя» Mb, и блок 10 управления коробкой передач вычисляет «ограниченный крутящий момент двигателя» Ма. Величина для «ограниченного крутящего момента двигателя» Ма передается в блок 8 управления двигателем, который производит ограничение крутящего момента двигателя на основании величины, которая ниже, чем величина для «затребованного крутящего момента двигателя» Mb. Когда величина для «ограниченного крутящего момента двигателя» Ма приблизительно соответствует «затребованному крутящему моменту двигателя» Mb, управление крутящим моментом двигателя основывается исключительно на «затребованном крутящем моменте двигателя» Mb.
Изобретение описано выше в отношении некоторых предпочтительных вариантов осуществления изобретения. Изобретение, конечно, не ограничено этими вариантами его осуществления, которые являются только примерами. Таким образом, другие варианты осуществления изобретения также вполне возможны в объеме охраны, ограниченном прилагаемой формулой изобретения. Таким образом, можно включать функцию регулирования, которая вызывает ограничение крутящего момента, то есть «ограниченный крутящий момент двигателя» постепенно становится ближе к величине для «затребованного крутящего момента двигателя», если водитель не нажимает в пределах разумного времени на педаль акселератора до ее максимального положения. Таким образом, предотвращается управление двигателем с ограничением крутящего момента в течение долгого времени.
Изобретение относится к управлению двигателями транспортных средств, в частности к регулированию крутящего момента двигателя. Способ управления крутящим моментом, выдаваемым двигателем транспортного средства с автоматической муфтой, из состояния, в котором ограничение крутящего момента применяют в ходе процесса включения сцепления, до состояния, в котором ограничение крутящего момента после завершения процесса включения сцепления уменьшается и в конечном счете полностью прекращается, заключается в постепенном возвращении ограничения крутящего момента двигателя назад к «затребованному водителем крутящему моменту двигателя» на основании разности между «затребованным крутящим моментом двигателя» и «ограниченным крутящим моментом двигателя». «Ограниченный крутящий момент двигателя» изменяется, только когда происходит изменение положения педали акселератора. Решение направлено на достижение комфортабельного включения сцепления, а также на минимизацию износа механических частей сцепления. 6 з.п. ф-лы, 3 ил.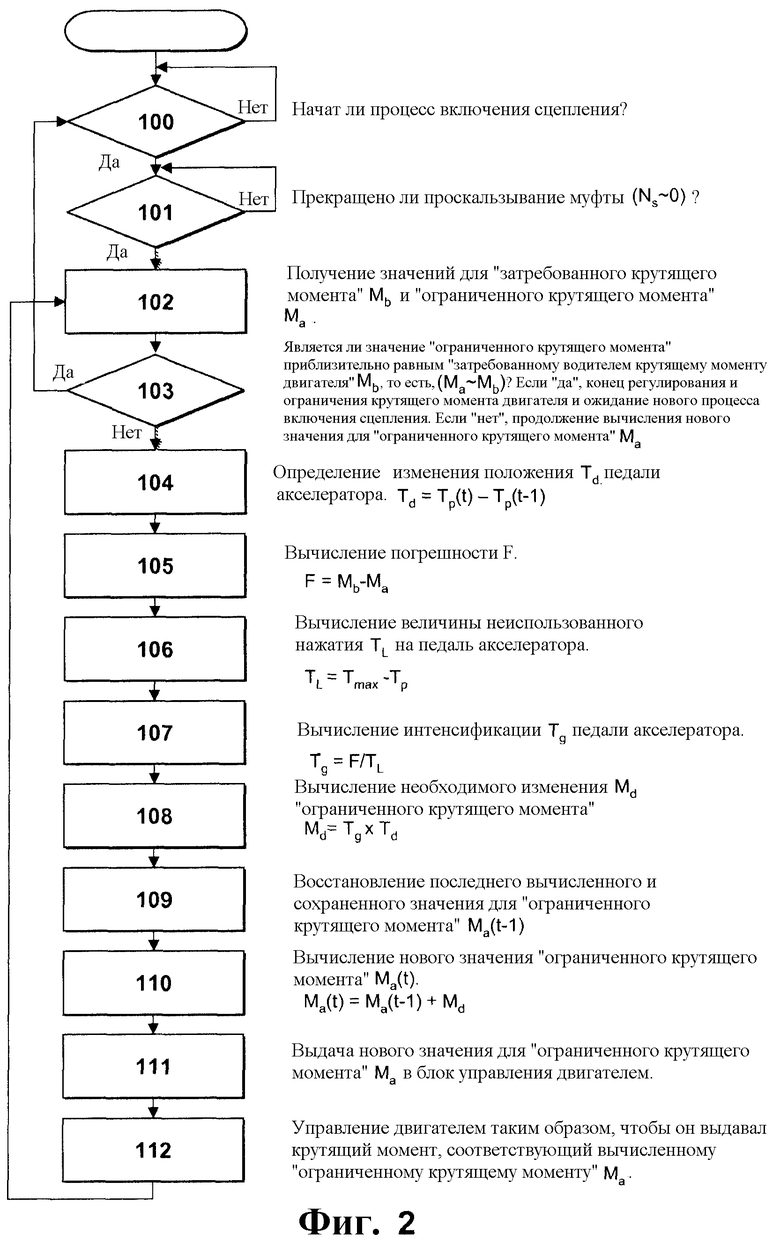
1. Способ управления крутящим моментом, выдаваемым двигателем транспортного средства с автоматической муфтой, из состояния, в котором ограничение крутящего момента применяют в ходе процесса включения сцепления, до состояния, в котором ограничение крутящего момента после завершения процесса включения сцепления уменьшается и, в конечном счете, полностью прекращается, отличающийся
постепенным возвращением ограничения крутящего момента двигателя назад к «затребованному водителем крутящему моменту двигателя» (Mb) на основании разности между «затребованным крутящим моментом двигателя» (Mb) и «ограниченным крутящим моментом двигателя» (Ma), выдаваемым двигателем, и на основании текущего положения (Tp) педали акселератора, посредством чего «ограниченный крутящий момент двигателя» (Ma) изменяется, только когда происходит изменение положения (Tp) педали акселератора.
2. Способ по п.1, отличающийся
окончанием ограничения крутящего момента, то есть приравниванием «затребованного крутящего момента двигателя» (Mb) к «ограниченному крутящему моменту двигателя» (Ma), когда не остается неиспользуемое нажатие (TL) на педаль акселератора или когда педаль (4) акселератора полностью отпущена до свободного положения (Tmin).
3. Способ по п.1 или 2, отличающийся
определением изменения (Td) положения педали акселератора,
вычислением погрешности (F) как разности между «затребованным крутящим моментом двигателя» (Mb) и «ограниченным крутящим моментом двигателя» (Ma),
вычислением неиспользуемого нажатия (TL) на педаль акселератора,
вычислением текущей интенсификации (Tg) педали акселератора,
вычислением текущего «ограниченного крутящего момента двигателя» (Ma),
управлением крутящего момента двигателя на основании текущей величины «ограниченного крутящего момента двигателя» (Ma).
4. Способ по п.3, отличающийся
устранением погрешности (F) таким образом, что разность между «затребованным крутящим моментом двигателя» (Mb) и «ограниченным крутящим моментом двигателя» (Ma) регулируется до нуля при максимальном положении педали акселератора.
5. Способ по п.3, отличающийся
вычислением интенсификации (Tg) педали акселератора как погрешности (F), разделенной на неиспользуемое нажатие (TL) на педаль акселератора.
6. Способ по п.3, отличающийся
вычислением изменения «ограниченного крутящего момента двигателя» (Ma) как интенсификации (Tg) педали акселератора, умноженной на изменение (Td) положения педали акселератора.
7. Способ по п.1, отличающийся
вычислением нового «ограниченного крутящего момента двигателя» (Ma) посредством применения к предыдущей величине «ограниченного крутящего момента двигателя» (Ma) изменения (Md) величины для «ограниченного крутящего момента двигателя».
| DE 102007056886 A1, 19.06.2008 | |||
| KR 20070094034 A, 19.09.2007 | |||
| КОМБИНИРОВАННАЯ СИСТЕМА ДИФФЕРЕНЦИРОВАННОГО РАСПРЕДЕЛЕНИЯ МОЩНОСТИ | 1996 |
|
RU2171752C2 |
| TW 200800774 A, 01.01.2008. | |||

