Изобретение относится к области технических средств судовождения, предназначенных для автоматической проводки судна по заданному курсу, оси фарватера (судового хода) или по заданной траектории движения.
Известен авторулевой [1], наиболее близкий по технической сущности с заявленным авторулевым судна, содержащий блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом к входу блока управления подключены выходы электронной картографической навигационно-информационной системы, приемоиндикатора спутниковой навигационной системы GPS, лага, рулевого колеса и гидравлического устройства управления рулем, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления.
В существующих образцах авторулевых отсутствуют подходы по формальному определению параметров управления движением судна yдоп, и автоматическому вводу этого значения в блок формирования закона управления рулем. Величина yдоп рассчитывается и вводится в блок формирования закона управления рулем вручную.
Таким образом, недостатками известного авторулевого судна является то, что не обеспечивается автоматизированное определение и учет допустимого бокового отклонения судна от заданной траектории движения (оси судового хода, фарватера, рекомендованного курса и т.п.), зависящего от ширины судового хода, габаритов судна и суммарного сноса последнего под воздействием ветра и течения.
Это вызывает необходимость с изменением условий плавания периодического отвлечения вахтенного помощника капитана на производство соответствующих расчетов и ручного ввода искомой величины (допустимого бокового отклонения судна) в авторулевой, что, в конечном счете, снижает навигационную безопасность плавания судна, а также делает не возможным автоматизацию процесса судовождения.
Целью изобретения является расширение функциональных возможностей существующего авторулевого за счет автоматизированного определения и учета допустимого бокового отклонения судна от заданной траектории движения, увеличения степени автоматизации процесса судовождения, исключения до минимума негативного влияния так называемого «человеческого фактора» в экстремальных условиях и повышения навигационной безопасности плавания судна.
Эта цель достигается тем, что к известному авторулевому судна, содержащему блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом на вход блока управления подключены выходы электронной картографической навигационно-информационной системы, приемоиндикатора спутниковой навигационной системы GPS, лага, рулевого колеса и гидравлического устройства управления рулем, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления, дополнительно подсоединен блок определения допустимого бокового отклонения судна от заданной траектории его движения, при этом вход данного блока подключен к выходам приемоиндикатора спутниковой навигационной системы GPS и электронной картографической навигационно-информационной системы, и выход которого подключен к входу блока управления.
Пример реализации заявляемого авторулевого судна
На фиг.1 изображена структурная схема заявляемого авторулевого судна. Данный авторулевой судна содержит: блок управления - 1, в котором находятся устройство формирования закона управления рулем - 2 и усилительно-преобразующее устройство - 3, рулевая машина (исполнительный механизм ИМ) - 4, датчик обратной связи - 5, блок определения допустимого бокового отклонения судна от заданной траектории движения (адаптивный вычислитель АВ) - 9. Усилитель и рулевая машина через датчик обратной связи - 5 охвачены внутренней отрицательной обратной связью и образуют следящую систему управления рулем. Ее назначение - обеспечить перекладку руля в соответствии с заданным значением угла перекладки руля δз, выработанным в устройстве формирования закона управления.
При этом к входу блока управления подключены через переключатель режимов управления - 14 выходы рулевого колеса 12 и гидравлического устройства управления рулем - 13, электронной картографической навигационно-информационной системы - 7, на входы которой подключены приемоиндикатор спутниковой навигационной системы GPS - 8, лага - 11, а выход блока управления - 1 соединен с входом рулевой машины - 4, выход которой через датчик обратной связи - 5 соединен с входом блока управления - 1, вход блока определения допустимого бокового отклонения судна от заданной траектории движения - 9 подключен к выходам приемоиндикатора спутниковой навигационной системы GPS - 8 и электронной картографической навигационно-информационной системы - 7, и выход которого подключен к входу блока формирования закона управления - 2.
Блок управления - 1 может быть выполнен на основе микропроцессора со специальным программным обеспечением, позволяющим осуществлять ввод/вывод информации и преобразование сигналов от нескольких навигационных датчиков (приборов), например микропроцессоров семейства AVR фирмы АТМЕС.
Блок определения допустимого бокового отклонения судна от заданной траектории может быть выполнен на основе стандартного микропроцессора, в том числе и зарубежных фирм.
При движении по заданной траектории основной регулируемой величиной является боковое отклонение центра масс судна от заданной траектории движения. Боковое отклонение вычисляется по данным счисления и спутниковым навигационным системам второго поколения (GPS, ГЛОНАСС, GPS+ГЛОНАСС), работающим в непрерывном режиме.
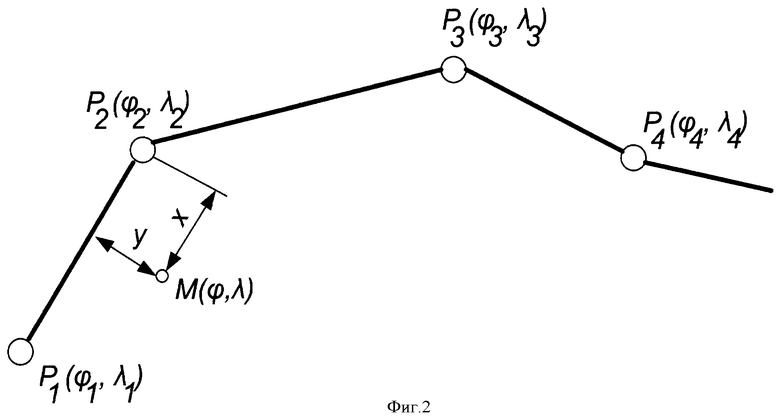
Заданный маршрут вводится в электронно-картографическую навигационно-информационную систему, а из нее в авторулевой, в виде координат начальной и конечной точек прямолинейных отрезков желаемой траектории, снятых с морской навигационной или лоцманской карт. На основе непрерывных данных о текущем месте судна автопилот вырабатывает значения маршрутных координат: бокового отклонение судна y от заданной траектории, а также расстояние x до следующей точки поворота (см. фиг.2).
Второй регулируемой величиной в автопилоте судна является угловое отклонение судна от заданного курса, который при этом совпадает с направлением заданной траектории.
Автоматическое управление судном по заданной траектории движения (ЗТД) осуществляется по командам в авторулевой (АР), которые вырабатывает электронная картографическая навигационная информационная система (ЭКНИС) - 7. Задача управления движением решается на основании информации, включающей:
- допустимое боковое отклонение yдоп судна от заданной траектории движения. Когда фактическое отклонение y, вызванное суммарным сносом судна течением и ветром и определяемое по обсервациям, становится равным допустимому, т.е. y=yдоп, ЭКНИС вырабатывает команду в АР на изменение удерживаемого курса на угол ΔК в сторону возвращения судна на заданную траекторию движения;
- угол ΔК изменения курса судна в сторону заданной траектории движения. По умолчанию ΔК=5° или курс направляется в очередную поворотную (маршрутную) точку заданной траектории движения.
Таким образом, к совокупности блоков (1-8, 10-14) добавляется новый блок - 9, представляющий собой адаптивный вычислитель бокового отклонения судна от заданной траектории движения, благодаря чему авторулевой приобретает новые свойства и достигается поставленная цель, т.е. достигается новый положительный эффект.
Для достижения указанной цели необходимо обосновать, рассчитать и автоматически ввести величину yдоп в устройство - 2 выработки закона управления рулем блока управления - 1.
Возможным путем решения этого вопроса является предположение, что допустимое боковое отклонение судна от заданной траектории движения равно допустимой погрешности счислимого места судна Мдоп, т.е. yдоп=Мдоп. В этом случае представляется возможным использовать методические подходы, приведенные в работе [3].
На внутренних водных путях, в отличие от морской зоны, габариты судового хода во многих случаях сопоставимы с габаритами самого судна. По этой причине при определении допустимой точности плавания на конкретном участке водного пути следует учитывать этот параметр.
Очевидно, что любой маршрут движения судов на внутренних водных путях имеет участки с различной шириной судового хода. Для удобства обоснования yдоп разделим весь маршрут перехода судна на следующие типовые участки:
I Тип. Ширина судового хода (Шсх) во много раз превышает ширину судна (Шс), например, когда Шсх>100 м. В этом случае ось судового хода делит его на две полосы с двусторонним встречным движением.
Здесь в качестве критерия эффективности навигационного обеспечения (НО) представляется целесообразным взять вероятность невыхода судна за кромки судового хода

где  - интеграл вероятностей (функция Лапласа).
- интеграл вероятностей (функция Лапласа).
Из формулы (1) для заданного уровня вероятности Рнев находим допустимую СКП места при плавании на участках первого типа:

где Х - аргумент функции Лапласа для заданного уровня вероятности Рнев.
В рассматриваемом случае Рнев=0,95.
В табл.1 приведены значения аргумента Х для различных уровней вероятностей Рнев [4].
В табл.2 приведены допустимые погрешности места судна типа «Волго-Дон» (Шс=16,7 м) при плавании по рекам с различной шириной судового хода.
В случае воздействия внешней среды (ветра и течения) происходит разворот судна вокруг центра масс на некоторый угол и диаметральная плоскость судна не совпадает с направлением судового хода. При этом наблюдается увеличение размеров полосы движения судна - ширины ходовой полосы судна при суммарном сносе S.
Величина S может быть рассчитана по формуле [3]

где L - длина судна;
с - суммарный угол сноса, обусловленный воздействием ветра и течения.
Суммарный угол сноса можно определить по спутниковым навигационным системам (СНС) второго поколения ГЛОНАСС или GPS. Несмотря на то, что в судовых приемоиндикаторах этих систем отсутствует сервисная задача такого рода, нам представляется возможным ее реализовать, используя результаты вычисления путевого угла ПУс и подключая к вычислителю приемоиндикатора выходные данные от гирокомпаса, исправленные поправкой гирокомпаса. Тогда угол суммарного сноса за счет совместного действия ветра и течения может быть рассчитан по формуле:

где с - суммарный снос судна от ветра и течения;
ИК - истинный курс судна.
В итоге формула (3) примет вид:

II Тип (Шсх=50-100 м). В этом случае ось судового хода является осью симметрии и естественной заданной траекторией движения.
Как и в первом случае Рнев берется равной 0,95.
В качестве критерия эффективности навигационного обеспечения (НО) представляется целесообразным взять вероятность невыхода судна за кромки судового хода с учетом воздействия внешней среды. Допустимая погрешность места в этом случае рассчитывается по формуле

III Тип (Шсх=20-50 м). Ширина судового хода (Шсх) сопоставима с шириной судна (Шс). В этом случае ось судового хода также является осью симметрии и естественной заданной траекторией движения судна.
В качестве критерия эффективности НО представляется целесообразным взять вероятность невыхода судна за кромки судового хода, равной 0,997. Мдоп может быть рассчитана по формуле

IV тип. Крутые повороты со свальным течением (Шсх=20-100 м). Как и в предыдущем случае, ось судового хода является осью симметрии и естественной заданной траекторией движения судна. Вероятность не выхода судна за кромки судового хода берется равной 0,997. Величина Мдоп рассчитывается по формуле

где d=Vtsinq - величина свала. Здесь V - скорость течения; t - время действия свального течения (время прохождения судном участка пути со свальным течением); q - угол между направлением курса и направлением действия свального течения.
Расчеты, проведенные по формулам (5)-(8) для различных типовых случаев, позволили определить допустимые погрешности определения координат места судна и, следовательно, боковые отклонения его от заданной траектории движения.
Данный авторулевой судна работает следующим образом. При плавании судна по заданной траектории движения с помощью приемоиндикатора - 8 производится непрерывное определение его места по GPS, в результате чего по полученным координатам с использованием электронной карты, вырабатываемой ЭКНИС - 7, определяется ширина судового хода в обсервованной точке. Одновременно в этой же точке по программе производится сопоставление фактической ширины судового хода с шириной судовых ходов типовых участков, занесенных в память ЭКНИС заблаговременно, т.е. устанавливается принадлежность обсервованной точки конкретному типовому участку маршрута судна.
В зависимости от принадлежности обсервованной точки тому или иному типовому участку производится выбор допустимой погрешности места судна и, следовательно, допустимого бокового отклонения судна от заданной траектории движения по следующему правилу:
если М0∈I участку с Шсх>100 м, то yдоп=Мдоп=21 м (для Рнев=0,95);
если М0∈II участку с Шсх=50-100 м, то yдоп=Мдоп=21 м (для Рнев=0,95);
если М0∈III участку с Шсх=20-50 м, то yдоп=Мдоп=1,1 м (для Рнев=0,997); Мдоп берется по левой границе диапазона, т.е. для Шсх=20 м;
если М0∈IV участку, то yдоп=Мдоп=1 м (для Рнев=0,997).
Построив зависимость величины бокового отклонения от ширины судового хода и описав ее с помощью математического выражения, представляется возможным автоматизировать процесс выбора yдоп в районе плавания, т.е. создать блок определения допустимого бокового отклонения судна от заданной траектории движения - 9 (адаптивный вычислитель), подключаемый к схеме авторулевого - 1.
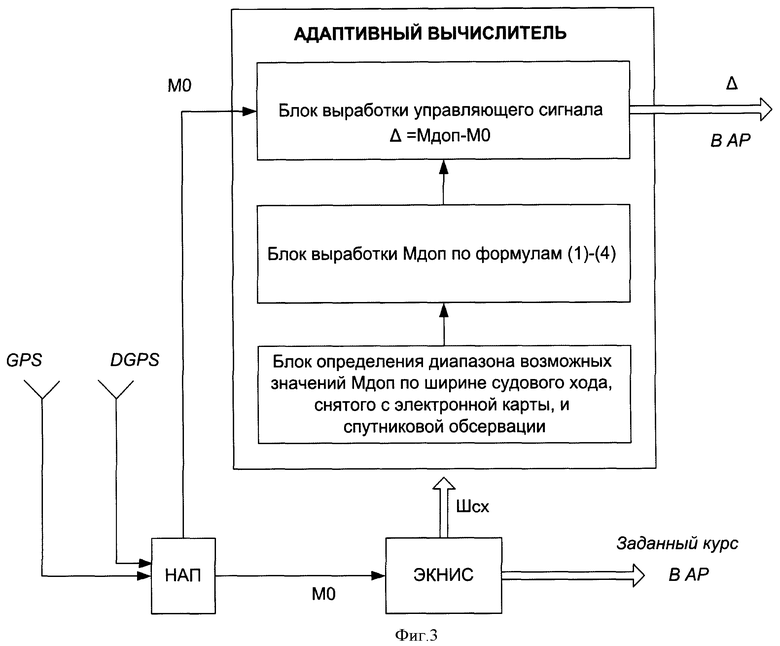
Принципиальная структурная схема адаптивного вычислителя приведена на фиг.3.
При отклонении судна от заданной траектории движения (заданного курса ψ) на величину Δ в устройстве формирования закона управления рулем - 2 блока управления - 1 вырабатывается электрический сигнал, соответствующий заданному значению угла перекладки руля, который поступает на вход следящей системы, где складывается с отрицательным сигналом внутренней обратной связи. Далее разность сигналов δз-δ поступает в усилитель - 3, а с его выхода сигнал подается на рулевую машину 4 судна 6. Начинается перекладка руля, которая продолжается до тех пор, пока действительное значение угла перекладки δ не станет равным заданному значению δз. При этом сигнал на входе следящей системы станет равным нулю.
Величина δз может быть рассчитана по формуле [1]

где k1, k2, k3, k4 - коэффициенты обратной связи;
Т - интервал интегрирования;
y - величина бокового отклонения судна от линии заданной траектории;
ω - угловая скорость поворота судна.
Угловую скорость ω определяют либо путем дифференцирования курсового сигнала, снимаемого с гирокомпаса 10, либо путем включения в систему управления измерителя угловой скорости поворота (гиротахометра), либо путем использования спутникового компаса.
Предложенное техническое решение обеспечивает автоматический расчет и ввод в авторулевой допустимого бокового отклонения судна от заданной траектории движения в зависимости от условий плавания.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен авторулевой судна, обеспечивающий автоматическое определение и ввод допустимого бокового отклонения судна от заданной траектории движения.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных сведений и известных технических решений явным образом не следует, что заявленный новый авторулевой судна с дополнительным блоком вычисления допустимого бокового отклонения судна от заданной траектории движения является очевидным для специалистов в области технических средств судовождения.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и элементы вычислительной техники, а также существующие технические средства навигации.
Технико-экономическая эффективность заявленного авторулевого судна заключается:
- в исключении риска влияния человеческого фактора на безопасность плавания судна;
- в повышении производительности труда вахтенного помощника капитана на 15-20%;
- в экономии расхода топлива и моторного масла за счет минимальных отклонений судна от заданной траектории движения до 5% и сокращении времени перехода;
- в повышении навигационной безопасности плавания за счет исключения отвлечений вахтенного помощника капитана от несения ходовой вахты для производства штурманских расчетов и введения вручную необходимых поправок в авторулевой на 10%.
Литература
1. Авторулевой Navis АР 3000. Рекламный проспект группы компаний «Навис», г.Санкт-Петербург.
2. Смирнов Е.Л., Яловенко А.В., Якушев А.А. Технические средства судовождения: Теория: Учебник для вузов. Под ред. Е.Л.Смирнова. - М.: Транспорт, 1988, - 376 с.
3. Катенин В.А., Бойков А.В., Лысиков А.В. К вопросу об обосновании допустимой погрешности места судна при плавании в автоматическом режиме по внутренним водным путям. Речной транспорт, 2007. №5. - С.73-77.
4. Митропольский А.К. Интеграл вероятностей. - Л.: ЛГУ, 1972. - 87 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПУТНИКОВЫЙ РЕЧНОЙ КОМПАС | 2009 |
|
RU2411451C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
Изобретение относится к области судового приборостроения и может быть использовано при проектировании адаптивных авторулевых на судах различных классов. Устройство содержит приемоиндикатор спутниковых навигационных систем, электронную картографическую навигационно-информационную систему, авторулевой, гирокомпас, рулевую машину. В состав устройства дополнительно введен адаптивный вычислитель бокового отклонения судна от заданной траектории движения. Достигается автоматизированное определение и учет допустимого бокового отклонения судна от заданной траектории. 2 табл., 3 ил.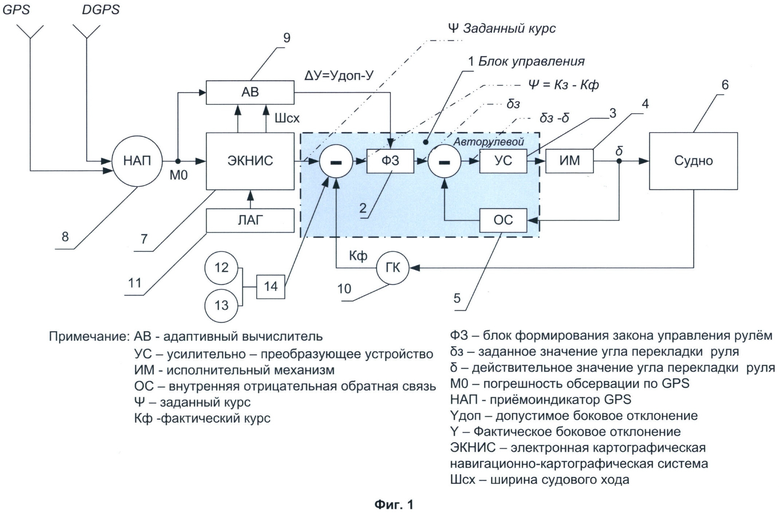
Авторулевой судна, содержащий блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом на вход блока управления подключены выходы электронной картографической навигационно-информационной системы, приемоиндикатора спутниковой навигационной системы GPS и лага, рулевого колеса и гидравлического устройства управления рулем, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления, отличающийся тем, что авторулевой дополнительно снабжен блоком определения допустимого бокового отклонения судна от заданной траектории его движения, при этом вход данного блока подключен к выходам приемоиндикатора спутниковой навигационной системы GPS и электронной картографической навигационно-информационной системы и выход подключен к входу блока управления.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2001 |
|
RU2207585C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| US 5523951 A, 04.06.1996 | |||
| US 5179385 A, 12.01.1993 | |||
| US 4513378 A, 23.04.1985. | |||

