Изобретение относится к технике электрических измерений механических сил, и в частности силы тяжести, пропорциональной массе, наложенной на грузоприемную платформу весоизмерительных устройств. Емкостные датчики силы обладают рядом достоинств и способны в недалеком будущем превзойти по метрологическим характеристикам тензорезистивные датчики, широко используемые в настоящее время в технике измерения усилий и весоизмерительных устройствах. Современные электронные приборы и измерительные цепи позволяют измерять электрическую емкость с более высокой точностью, чем электрическое сопротивление. Относительное изменение емкости в емкостных датчиках существенно превосходит допустимое относительное изменение электрического сопротивления в тензодатчиках. В то же время электрическая емкость конденсаторов с воздушным диэлектриком, используемым в качестве чувствительного элемента емкостных датчиков, практически не зависит от температуры, давления и влажности воздуха.
Известен емкостный датчик силы, содержащий две жесткозакрепленные по периферии одинарные мембраны с двухсторонними жесткими центральными втулками. С втулками внутри мембранной полости жестко связаны изолированные от них электроды емкостного преобразователя перемещения. Под действием измеряемого усилия мембраны прогибаются, что приводит к пропорциональному изменению воздушного зазора и, следовательно, электрической емкости между двумя электродами [патент РФ №2065588, G01L 1/14, 1992]. В указанном датчике, крепление двух мембран с двухсторонними жесткими центральными втулками осуществляется при помощи болтового соединения, что ухудшает метрологические характеристики за счет ухудшения линейности, обусловленной увеличением механического гистерезиса.
Наиболее близким по технической сущности является емкостный силоизмерительный датчик содержащий блок-корпус, в котором размещены в отдельных изолированных вставках два электрода, образующие конденсатор с воздушным диэлектриком, электрическая емкость которого пропорциональна измеряемому усилию. Изолированные вставки закреплены на противоположных стенках отверстия в горизонтальной плоскости блок-корпуса, выполненного в виде параллелограмма с верхним и нижним упругими элементами, переходящими в жесткие боковые основания, одно из которых имеет опорную поверхность для крепления датчика, а другое предназначено для восприятия рабочих нагрузок [патент РФ №2152010, G01L 1/14, 1998].
Существенными особенностями данной конструкции, которые позволяют рассматривать ее в качестве прототипа, являются:
выполнение упругого элемента в виде монолитного металлического блок-корпуса, содержащего верхние и нижние упругие элементы и жесткие основания, который обладает высокой технологичностью, простотой конструкции и изготовления;
жесткие связи электродов воздушного конденсатора со стенками боковых оснований блок-корпуса, благодаря которым воздушный зазор и электрическая емкость между электродами изменяется пропорционально измеряемому усилию;
установка электродов в изолированных вставках в горизонтальной плоскости блок-корпуса.
К числу конструктивных недостатков, которые могут затруднить использование данного датчика, следует отнести его чувствительность к паразитным механическим моментам, возникающим, например, при использовании датчика в весоизмерительных устройствах с верхним расположением грузоприемной платформы, что приводит к снижению точности измерения.
Технической задачей предлагаемого изобретения является создание емкостного силоизмерительного датчика с пониженной чувствительностью датчика к паразитным механическим моментам, т.е. повышение точности измерений.
Для решения поставленной задачи, в известном емкостном силоизмерительном датчике согласно изобретению подвижный электрод исходно установлен в горизонтальной плоскости симметрии блок-корпуса таким образом, что одновременно три координаты его центра совмещены с координатами точки пересечения продольной и поперечной осей кручения жесткого бокового основания, предназначенного для восприятия измеряемого усилия. При этом электроды выполнены в виде прямоугольных пластин. Значение отношения поперечной и продольной сторон пластин численно равно значению отношения продольного и поперечного углов закручивания жесткого бокового основания, предназначенного для крепления грузоприемной платформы.
На фиг.1 показан вид спереди на датчик и его сечение;
на фиг.2 - упругие линии блок-корпуса;
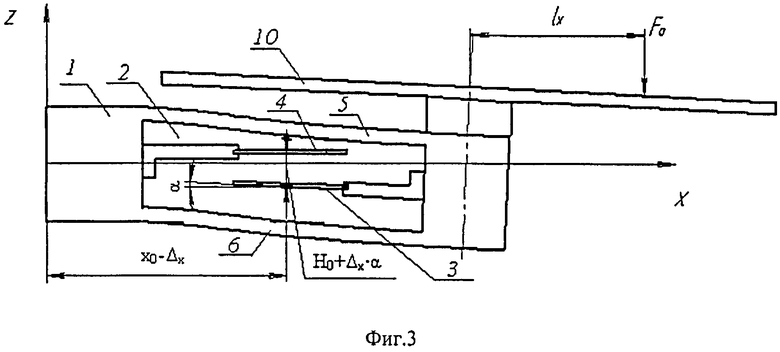
на фиг.3 - вид спереди на датчик при нецентральном нагружении;
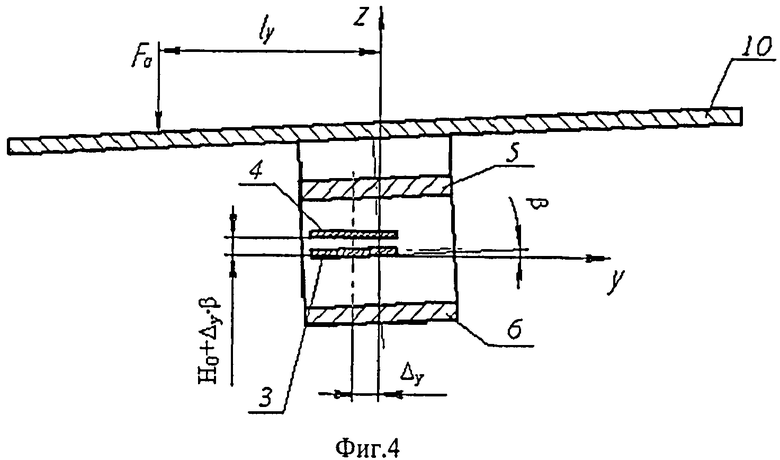
на фиг.4 - сечение датчика при нецентральном нагружении.
Предлагаемый емкостный силоизмерительный датчик имеет следующую конструкцию. Датчик содержит деформируемый блок-корпус 1 с отверстием 2, в котором размещены подвижный электрод 3 и неподвижный электрод 4 (фиг.1). Блок-корпус 1 имеет параллелограммную конструкцию, выполненную с верхними и нижними упругими элементами 5, 6, переходящими в жесткие боковые основания 7, 8, одно из которых, основание 7, предназначено для крепления датчика на опоре 9, а основание 8 - для крепления грузоприемной платформы 10.
Подвижный электрод 3 и неподвижный электрод 4 выполнены в форме прямоугольных пластин. Они установлены параллельно друг другу и горизонтальным граням упругих элементов 5, 6, в отдельных изолированных вставках 11, 12, закрепленных на противоположных стенках отверстия 2 в горизонтальной плоскости симметрии блок-корпуса. При этом вставка 11 закреплена на стороне стенки отверстия, принадлежащей жесткому боковому основанию 8, а вставка 12 - на стороне, принадлежащей жесткому основанию 7. Центр подвижного электрода 3 установлен в точке, через которую проходят продольная и поперечная оси закручивания жесткого бокового основания 8. Благодаря такому расположению существенно снижается погрешность, порождаемая нецентральном расположении массы на грузоприемной платформе 10.
Предлагаемый емкостный силоизмерительный датчик работает следующим образом. Под воздействием силы F0, равной весу измеряемой массы, наложенной на грузоприемную платформу 10 (фиг.1), происходит изгиб верхнего и нижнего упругих элементов 5, 6, смещение вниз жесткого бокового основания 8 и боковой стенки отверстия 2 с закрепленной на ней изолированной вставкой 11 и подвижным электродом 3 относительно противоположной стенки отверстия с закрепленной на ней изолированной вставкой 12 с неподвижным электродом 4, что приводит к изменению воздушного зазора и, следовательно, электрической емкости между двумя электродами пропорционально измеряемому усилию F0.
В реальной параллелограммной конструкции блок-корпуса жесткое боковое основание 8 испытывает, помимо вертикального линейного перемещения z=k·F0, пропорционального измеряемому усилию, паразитные угловые перемещения (повороты), пропорциональные паразитным механическим моментам, возникающим при нецентральном наложении измеряемой массы на грузоприемной платформе (фиг.3 и фиг.4).
Численные значения паразитных моментов, определяются выражениями:
M1=F0·lx,
M2=F0·ly,
где F0 - сила тяжести измеряемой массы, a lx, ly - координаты (проекции) точки расположения центра измеряемой массы относительно центра платформы 10 по осям x и y соответственно. Первый из упомянутых моментов M1 вызывает поворот бокового основания 8 и жестко связанной с этим основанием грузоприемной платформы 10 в плоскости XZ на угол α вокруг оси, параллельной оси Y (фиг.3). Второй момент М2 вызывает поворот основания 8 и платформы 10 вокруг оси Х на угол β (фиг.4). Таким образом, плоскость расположения подвижного электрода 3 оказывается наклоненной относительно плоскости установки неподвижного электрода 4, численно характеризуемой углами α и β.
Если центр подвижного электрода 3 (фиг.3) смещен на величину Δx относительно оси поворота в плоскости XZ, то в первом приближении относительное изменение электрической емкости при повороте подвижного электрода на угол α определяется как:
Аналогичный вид имеет выражение для определения относительного изменения емкости плоского конденсатора при повороте на угол β (фиг.4):
где Δy - смещение центров подвижного электрода 3 относительно оси поворота в плоскости YZ. Погрешности (1) и (2) емкостного преобразователя, обусловленные влиянием угловых перемещений подвижного электрода, пропорциональны первой степени углов закручивания и поэтому при неправильной установке подвижного электрода могут порождать большие дополнительные погрешности. Для исключения погрешностей (1) и (2) в емкостном силоизмерительном датчике согласно изобретению центр подвижного электрода 3 исходно установлен в точке с координатами (x0, 0, 0), лежащей в горизонтальной плоскости симметрии блок-корпуса 1 (фиг.1).
Это означает, что центр подвижного электрода установлен на оси X, являющейся осью симметрии и одновременно осью поворота жесткого бокового основания 8 относительно неподвижного жесткого бокового основания 7 в плоскости YZ. Результатом упомянутого совмещения имеем Δy=0 и γ2=0.
Ось кручения жесткого бокового основания 8 в плоскости XZ параллельна оси Y и пересекает ось Х в некоторой точке x=x0. Положение этой точки на оси Х для параллелограммных конструкций, в частности, конструкций типа двойная консольная балка с жесткими концами, не очевидное. Для определения координаты х0, зависящей от геометрических размеров и физических свойств материала блок-корпуса 1, нами был разработан метод численного моделирования с применением МКЭ в системе ANSYS. На фиг.2 изображены типовые эпюры а, б, в смещений z(x) срединной линии блок-корпуса 1 при трех значениях моментов М1 (фиг.3), равных соответственно 0, -lx·F0, lx·F0. На фиг.2 видно, что линейные участки эпюр а, б, в пересекаются в точке А` с координатами x=x0 и z=k·F0, которые и является координатами точки пересечения центра поворота жесткого основания 8 блок-корпуса 1 с плоскостью XZ. При изменении измеряемого усилия F0 точка пересечения оси вращения с плоскостью XZ перемещается вдоль пунктирной прямой АА` с неизменной координатой x=x0. При изменении измеряемого усилия центр подвижного электрода так же перемещается по прямой АА` без нарушения его начального совмещения с центром поворота в т.A. Результатом упомянутого совмещения является Δx=0 и γ1`=0.
Из уравнений (1) и (2) можно оценить технологические допуски на точность установки Δx и Δy подвижного электрода 3 в отверстии 2 блок-корпуса 1, согласно изобретению, для реализации требуемой точности измерения.
Известно, что при повороте одного из электродов плоского конденсатора вокруг оси, проходящей через его середину, относительное изменение емкости составит:
где ΔH1 - перемещение края электрода при повороте, H0 - расстояние между центрами электродов. При повороте подвижного электрода 3 относительно неподвижного 4 на малый угол α вокруг оси, проходящей через его центр, имеем:
ΔH1=α·а
и выражение (3) приводится к виду:
Аналогичным образом, при повороте подвижного электрода 3 относительно неподвижного электрода 4 на малый угол β вокруг оси, проходящей через его центр, относительное изменение емкости составит:
Таким образом, результатом предложенного согласно изобретению совмещения центра подвижного электрода 4 с точкой пересечения осей вращения жесткого бокового основания 8, погрешность измерения, порожденная нецентральным расположением массы на грузоприемной платформе 10, а следовательно и моментами M1 и М2, может быть снижена до значений, определяемых формулами (4) и (5) второго порядка малости.
Для равенства погрешностей γ1 и γ2, вносимых поворотом жесткого бокового основания 8, предназначенного для крепления грузоприемной платформы 10, в плоскостях XZ и YZ под воздействием паразитных моментов M1 и M2 соответственно, подвижный электрод 3 и неподвижный электрод 4, исходя из (4) и (5), имеют размеры согласно условию:
 .
.
Проведенные испытания предлагаемой конструкции емкостного силоизмерительного датчика в различных модификациях показали высокую точность измерения рабочих нагрузок при различном расположении массы на грузоприемной платформе 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1998 |
|
RU2152010C1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛОВЫХ ВОЗДЕЙСТВИЙ | 2003 |
|
RU2251670C2 |
| Ёмкостный датчик деформации | 2020 |
|
RU2759176C1 |
| Способ измерения деформаций растяжение-сжатие | 2020 |
|
RU2753747C1 |
| Ёмкостный датчик деформации | 2020 |
|
RU2759175C1 |
| УСТРОЙСТВО ВЗВЕШИВАНИЯ И РАСПРЕДЕЛЕНИЯ ВЕСА ТЕЛА ЧЕЛОВЕКА ПО ОПОРНЫМ ПОВЕРХНОСТЯМ (ЗОНАМ) | 2003 |
|
RU2247337C1 |
| Устройство для взвешивания | 1989 |
|
SU1732174A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1996 |
|
RU2108551C1 |
| ЕМКОСТНЫЙ ДАТЧИК СИЛЫ | 1992 |
|
RU2065588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2003 |
|
RU2276777C2 |

Изобретение относится к технике электрических измерений механических сил, и в частности силы тяжести, пропорциональной массе, наложенной на грузоприемную платформу весоизмерительных устройств. Датчик содержит деформируемый монолитный металлический блок-корпус с отверстием, в котором размещены электроды для измерения электрической емкости, установленные параллельно друг другу и горизонтальным граням блок-корпуса на отдельных изолированных вставках, закрепленных на противоположных стенках отверстия в горизонтальной плоскости блок-корпуса, выполненного в виде параллелограмма с верхними и нижними упругими элементами, переходящими в жесткие боковые основания, одно из которых предназначено для крепления датчика, а второе - для восприятия измеряемого усилия. Подвижный электрод установлен так, что одновременно три координаты его центра совмещены с координатами точки, в которой пересекаются продольная и поперечная оси закручивания жесткого бокового основания, предназначенного для восприятия измеряемого усилия. Технический результат: высокая точность измерения рабочих нагрузок при различном расположении массы на грузоприемной платформе. 1 з.п. ф-лы, 4 ил.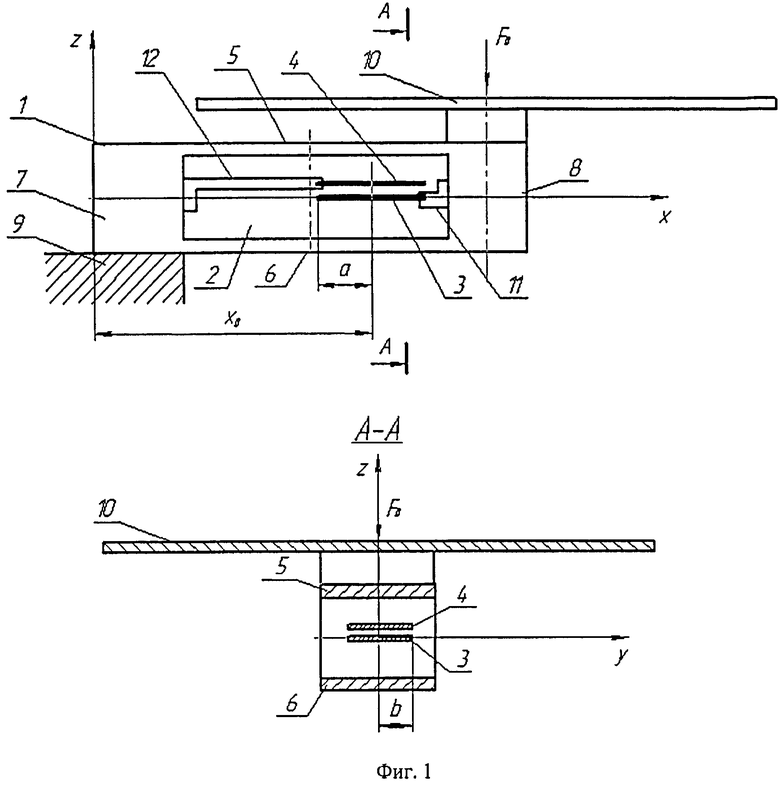
1. Емкостный силоизмерительный датчик, содержащий деформируемый монолитный металлический блок-корпус с отверстием, в котором размещены электроды для измерения электрической емкости, установленные параллельно друг другу и горизонтальным граням блок-корпуса на отдельных изолированных вставках, закрепленных на противоположных стенках отверстия в горизонтальной плоскости блок-корпуса, выполненного в виде параллелограмма с верхними и нижними упругими элементами, переходящими в жесткие боковые основания, одно из которых предназначено для крепления датчика, а второе - для восприятия измеряемого усилия, отличающийся тем, что подвижный электрод установлен так, что одновременно три координаты его центра совмещены с координатами точки, в которой пересекаются продольная и поперечная оси закручивания жесткого бокового основания, предназначенного для восприятия измеряемого усилия.
2. Емкостный силоизмерительный датчик по п.1, отличающийся тем, что подвижный и неподвижный электроды выполнены в виде прямоугольных пластин, при этом отношение поперечной и продольной сторон равно отношению продольного и поперечного углов закручивания жесткого бокового основания, предназначенного для восприятия измеряемого усилия.
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1998 |
|
RU2152010C1 |
| ЕМКОСТНЫЙ ДАТЧИК СИЛЫ | 1992 |
|
RU2065588C1 |
| RU 94025443 A1, 10.05.1996 | |||
| US 20080190210 A1, 14.08.2008. | |||

