Изобретение относится к области авиационного приборостроения и позволяет осуществить поиск в автоматическом режиме взлетно-посадочной полосы и обеспечить автоматическое управление посадкой летательного аппарата независимо от метеоусловий и времени суток.
В известном аналоге на изобретение (Ю.Г.Кассин и др. Автоматическое управление самолетом при заходе на посадку. Рига, Институт инженеров ГА, 1979) [1] описан способ посадки самолета, в котором радиотехническими средствами формируют в пространстве курсовую и глиссадную условные линии, проекции которых совпадают с продольной осью взлетно-посадочной полосы (ВПП), измеряют угловые отклонения самолета от курсовой и глиссадной линии, минимизируют эти отклонения путем управления боковым и продольным движениями самолета в процессе снижения по глиссаде, после чего посадку осуществляют визуально, наблюдая огни светотехнического оборудования аэродрома. По цвету и расположению огней светотехнического оборудования определяют направление на ось ВПП, удаление от ВПП, плоскость горизонта, границы ВПП, место приземления, направление пробега после посадки.
Основными причинами, препятствующими надежному достижению требуемого технического результата при использовании предлагаемого способа посадки, является отсутствие автоматического управления самолетом на этапе выравнивания самолета относительно плоскости взлетно-посадочной полосы при подлете к ней, а также в области пролета самолета над полосой до точки посадки на полосу, что снижает надежность и безопасность завершения посадки самолета за счет человеческого фактора, обусловленного повышенной психофизиологической усталостью пилота после длительного полета.
Известны аналоги изобретений ВПП (патент США №4101893, кл. 343-108, 1978[2]; патент Германии №3629911, кл. B64F 1/18, 1993 [3]), основанные на радиотехнических способах ориентирования при заходе на посадку, в которых принимают сигналы от установленных по периметру ВПП активных или пассивных маркеров, преобразуют их в видеосигналы, отображают в дисплее и по угловому положению отметок, отображающих контуры ВПП относительно вертикальной оси экрана дисплея, судят о направлении движения самолета относительно оси ВПП.
Причины, препятствующие достижению требуемого технического результата при использовании этих способов, заключаются в том, что они, обеспечивая формирование видеообраза ВПП, не рассчитывают координат положения самолета относительно ВПП и не обеспечивают информационной связи с системой управления самолетом, что не позволяет реализовать полу- и автоматические режимы посадки. Применяемые маркеры не позволяют определять положение самолета на всех этапах посадки с точностью, необходимой для реализации автоматической посадки, особенно в процессе выравнивания.
Известны аналоги на изобретения (патенты РФ №1804629, кл. G08G 5/02, 1993 [4]; №1836642, кл. G01S 13/00, 1993 [5]), в которых способы получения посадочной информации для летательного аппарата основаны на обработке радиолокационного изображения ВПП, по которому определяют необходимые данные и отображают их на экране бортового индикатора или лобовом стекле в удобном для восприятия пилотом виде.
В аналоге на изобретение (патент РФ №2369532 С2, МПК B64F 1/18 [6]) приведена система посадки летательных аппаратов, которая содержит три лазерных излучателя, установленные вблизи взлетно-посадочной полосы со стороны захода воздушного судна на посадку, два из которых - глиссадные - расположены по краям полосы и предназначены для формирования лучей, определяющих плоскость глиссады, а третий - курсовой - расположен на продолжении осевой лини полосы и предназначен для формирования луча, определяющего курс посадки. В качестве лазерных излучателей используют полупроводниковые лазерные излучатели, выполненные с возможностью изменения направления формируемых лучей в вертикальной и горизонтальной плоскостях. Глиссадные излучатели установлены на определенном расстоянии от начала полосы. Курсовой излучатель установлен с возможностью формирования луча под определенным углом относительно горизонтальной плоскости. Указанные расстояние и угол определяются из соотношений, в одном из которых фигурирует заданная величина допустимой ошибки положения воздушного судна по вертикали в точке дальнего привода при посадке, а в другом - заданный угол наклона плоскости глиссады и угол свободного прохождения луча над неровностями местности.
Существенным недостатком данной системы является большая вероятность ослепления пилота лазерными излучателями при маневрировании на глиссаде, что снижает надежность и безопасность посадки самолета при любых метеоусловиях (документальный фильм «Лазерная система посадки» "Координата". (Момент ослепления летчика: 8:01). Режим доступа: http://www.avsim.su/f/dokumentalnie-filmi-i-syuzheti-96/lazernaya-sistema-posadki-koordinata38362.html?action=viewonline [7]).
В прототипе к изобретению (заявка Японии №56-112398, кл. B64D 45/08, 1981 [8]) описан способ автоматической посадки, который является наиболее близким техническим решением к предлагаемому, включающий прием излучения от точечных световых маркеров, установленных на одной линии по оси ВПП на определенных расстояниях друг от друга, измерение углов между направлениями на маркеры, преобразование световых сигналов в электрические, пропорциональные измеренным углам, измерение высоты с помощью высотомера, формирование сигналов управления самолетом в вертикальной и горизонтальной плоскостях. При этом управление в горизонтальной плоскости осуществляют, минимизируя угол между направлениями на ближний и дальний маркеры. Для формирования сигналов управления самолетом в вертикальной плоскости последовательно измеряют углы между направлениями на соседние маркеры и высоту самолета над первым из них по ходу полета.
Причины, препятствующие достижению требуемого технического результата при использовании способа-прототипа, заключаются в следующем. В сложных метеоусловиях или при ярком солнечном освещении способ может оказаться неработоспособным. На этапе выравнивания при приземлении самолета возможна потеря видимости маркеров, что не позволяет осуществить автоматическое управление посадки до конца. В случае выхода из строя одного или нескольких маркеров нарушается процесс определения положения самолета относительно ВПП, что снижает точность пилотирования и соответственно безопасность посадки. Точность управления самолетом также снижается вследствие ошибок измерения мгновенных значений высоты при пролете самолетом маркера. Применение высокоточного высотомера малых высот усложняет систему и существенно увеличивает ее стоимость. Кроме того, маркеры должны быть углублены в поверхность ВПП, чтобы не мешать движению самолета после приземления.
Цель изобретения - повышение надежности посадки летательного аппарата на взлетно-посадочную полосу. Указанный технический результат достигают с помощью лазерной системы автоматического управления посадкой летательного аппарата.
Лазерная система автоматического управления посадкой летательного аппарата (фиг.1) состоит из двух полусферических датчиков лазерного излучения 1, 2, четырех цилиндрических датчиков лазерного излучения 3, 4, 5, 6, сферического датчика лазерного излучения 9, радиоприемопередатчика 10 и лазерного излучателя 11. Полусферические датчики лазерного излучения 1, 2 установлены по продольной линии в начале и в конце, а четыре цилиндрических датчика лазерного излучения 3, 4, 5, 6 расположены по бокам в начале и в конце взлетно-посадочной полосы 7, а на летательном аппарате 8 размещены сферический датчик лазерного излучения 9, радиоприемопередатчик 10 и лазерный излучатель 11.
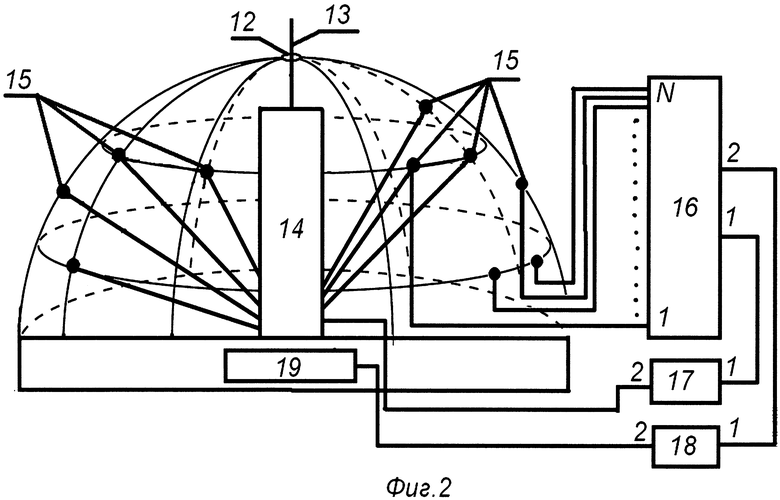
Полусферические датчики лазерного излучения 1, 2 (фиг.2) конструктивно не отличаются и имеют на полюсах отверстия 12 для прохода луча 13 лазера 14, а на поверхности полусферы размещены фотодиоды 15, которые укреплены с шагом дискретизации по углам пеленга и места. Фотодиоды 15 подключены к многоканальному входу 1…N контроллера полусферического датчика лазерного излучения 16, первый и второй входы-выходы которого подключены, соответственно, к первому входу-выходу контроллера лазера 17 и к первому входу-выходу контроллера радиоприемопередатчика 18 (фиг.2). Второй вход-выход контроллера лазера 17 соединен с входом-выходом лазера 14, а второй вход-выход контроллера радиоприемопередатчика 18 подключен к входу-выходу радиоприемопередатчика 19.
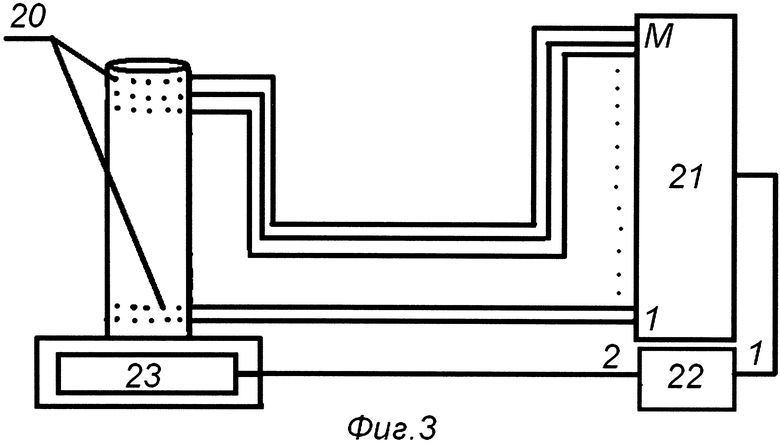
Цилиндрические датчики лазерного излучения 3, 4, 5, 6 (фиг.3) имеют идентичную конструкцию, и на поверхности цилиндра размещены фотодиоды 20, которые укреплены с выбранным шагом дискретизации по углам пеленга и места. Фотодиоды 20 подключены к многоканальному входу 1…М контроллера цилиндрического датчика лазерного излучения 21, вход-выход которого соединен с первым входом-выходом контроллера радиоприемопередатчика 22, второй вход-выход которого подключен к входу-выходу радиоприемопередатчика 23.
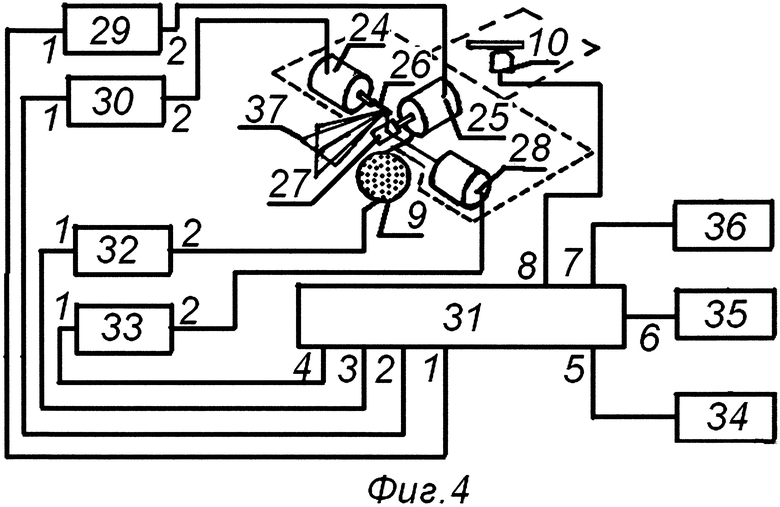
Лазерный излучатель 11 (фиг.4) состоит из двух электромеханических преобразователей 24, 25 с закрепленными на концах их валов зеркалами 26, 27 и лазера 28. Входы-выходы электромеханических преобразователей 24, 25 подключены, соответственно, к вторым входам-выходам контроллеров управления электромеханическими преобразователями 29, 30, которые своими первыми входами-выходами соединены, соответственно, с первым и вторым входами-выходами контроллера лазерной системы автоматического управления посадкой летательного аппарата 31. Третий и четвертый входы-выходы контроллера лазерной системы автоматического управления посадкой летательного аппарата 31 соединены, соответственно, с первым входом-выходом контроллера сферического датчика лазерного излучения 32 и с первым входом-выходом контроллера лазера 33. Второй вход-выход контроллера лазера 33 подключен к входу-выходу лазера 28, а второй вход-выход контроллера сферического датчика лазерного излучения 32 соединен с входом-выходом сферического датчика лазерного излучения 9. Пятый и шестой входы-выходы контроллера лазерной системы автоматического управления посадкой летательного аппарата 31 подключены, соответственно, к входу-выходу системы регулирования углами крена, рысканья, атаки и силы тяги летательного аппарата 34 и к входу-выходу штатной радиолокационно-навигационной системы 35. Седьмой и восьмой входы-выходы лазерной системы автоматического управления посадкой летательного аппарата 31 подключены, соответственно, к входам-выходам системы управления движением летательного аппарата по взлетно-посадочной полосе 36 и входам-выходам радиоприемопередатчика 10.
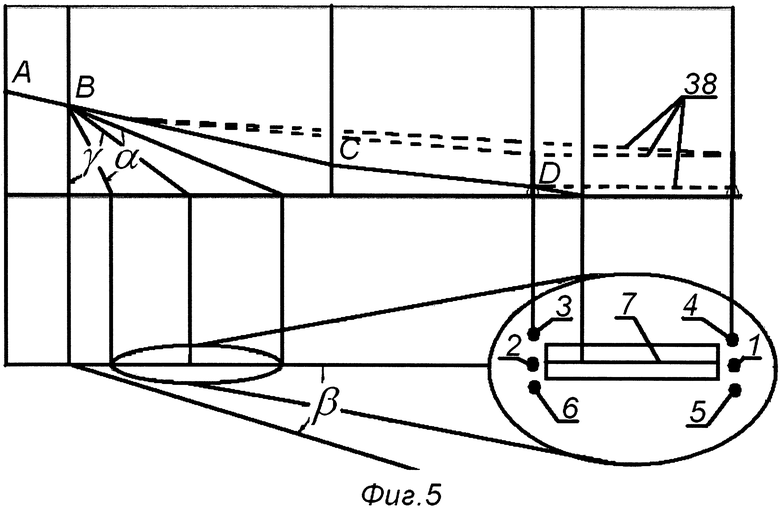
Способ посадки летательного аппарата реализуется следующим образом. При заходе летательного аппарата на глиссадную траекторию (точка А, фиг.5) штатная радиолокационно-навигационная система организации посадки летательного аппарата 35 со своего входа-выхода выдает команду «Инициализация системы лазерной посадки», которая поступает на шестой вход-выход контроллера лазерной системы автоматического управления посадкой 31. В результате этого контроллер лазерной системы автоматического управления посадкой 31 на восьмой вход-выход выдает код команды «Захват датчиков лазерного излучения». Эта команда, поступая на вход-выход радиоприемопередатчика 10, транслируется на радиоприемопередатчики 19 (фиг.2) и 23 (фиг.3), соответственно, двух полусферических датчиков лазерного излучения 1, 2 и четырех цилиндрических 3, 4, 5, 6 датчиков лазерного излучения (фиг.1). Код команды «Захват датчиков лазерного излучения» с радиоприемопередатчиков 19 и 23 поступает, соответственно, на вторые входы-выходы контроллеров радиоприемопередатчиков, соответственно, 18 (фиг.2) и 22 (фиг.3). Декодируя принятую команду «Захват датчиков лазерного излучения», контроллеры 18, 22 инициализируют, соответственно, контроллер 16 полусферических датчиков лазерного излучения и контроллер 21 цилиндрических датчиков лазерного излучения, передавая код инициализации, соответственно, с первого входа-выхода контроллера 18 на второй вход-выход контроллера 16 и с первого входа-выхода контроллера 22 на вход-выход контроллера 21. После инициализации контроллер 16 со второго входа-выхода выдает код «Готов к захвату луча лазера», который поступает на первый вход-выход контроллера радиоприемопередатчика 18, кодируется и передается на вход-выход радиоприемопередатчика 19. Радиоприемопередатчик 19 транслирует информацию радиоприемопередатчику 10. Кроме этого, контроллер 16 выдает код «Включить лазер». Этот код поступает с первого входа-выхода котроллера 16 на первый вход-выход котроллера 17, а со второго входа-выхода контроллера 17 на вход-выход лазера 14. Лазер 14 включается и его луч 13 направляется через отверстие 12 перпендикулярно плоскости взлетно-посадочной полосы 7 (фиг.1).
Контроллер 21 цилиндрических датчиков лазерного излучения после инициализации выдает код «Готов к захвату луча лазера», который поступает с входа-выхода на первый вход-выход радиоприемопередатчика 22, кодируется и передается со второго входа-выхода контроллера 22 на вход-выход радиоприемопередатчика 23. Радиоприемопередатчик 23 транслирует полученную информацию радиоприемопередатчику 10.
Радиоприемопередатчик 10 принимает коды «Готов к захвату луча лазера» от датчиков лазерного излучения 1, 2, 3, 4, 5, 6 и передает эти коды на восьмой вход-выход контроллера лазерной системы автоматического управления посадкой 31. Получив и обработав коды команд «Готов к захвату лазерного луча», контроллер лазерной системы автоматического управления посадкой 31 генерирует команду «Включение электромеханических преобразователей», которая с первого и второго входов-выходов контроллера лазерной системы автоматического управления посадкой 31 поступает, соответственно, на первые входы-выходы контроллеров управления электромеханическими преобразователями 29, 30. Контроллеры управления электромеханическими преобразователями 29, 30 управляют электромеханическими преобразователями, соответственно, 25, 24, которые обеспечивают поворот зеркал 27, 26 таким образом, чтобы отраженный от них луч 37 лазера 28 имел минимальный угол атаки-γ (фиг.5). Далее контроллер лазерной системы автоматического управления посадкой 31 генерирует команды «Включить бортовой лазер» и «Включить бортовой датчик лазерного излучения». Код команды «Включить бортовой лазер» поступает с четвертого входа-выхода контроллера лазерной системы автоматического управления посадкой 31 на первый вход-выход контроллера лазера 33, второй вход-выход которого соединен с входом-выходом лазера 28, и лазер 28 включается. Код команды «Включить бортовой датчик лазерного излучения» с третьего входа-выхода контроллера лазерной системы автоматического управления посадкой 31 поступает на первый вход-выход контроллера сферического датчика лазерного излучения 32, второй вход-выход которого соединен с входом-выходом сферического датчика лазерного излучения 9. При этом контроллер сферического датчика лазерного излучения 32 включает сферический датчик лазерного излучения 9. На этом этап инициализации лазерной системы автоматического управления посадкой 28 завершается (точка В, фиг.5).
Далее контроллер лазерной системы автоматического управления посадкой 31 выдает на первый и второй входы-выходы команду «Начать поиск датчиков лазерного излучения». Эта команда поступает, соответственно, на первые входы-выходы контроллеров управления электромеханическими преобразователями 29, 30. Контроллеры управления электромеханическими преобразователями 29, 30 обеспечивают работу электромеханических преобразователей, соответственно, 25 и 24, которые изменяют положение зеркал 26, 27 в пространстве таким образом, чтобы луч 37 лазера 28 вращался, образуя «конус» в пространстве, а на поверхности Земли траекторию перемещающейся «спирали». При этом захват датчиков лазерного излучения 1, 2, 3, 4, 5, 6 осуществляется за счет управления направлением луча 37 лазера 28. Направление луча 37 лазера 28 определяется углами раствора конуса - α, атаки - γ и рысканья - β (фиг.5). При обнаружении двух полусферических датчиков лазерного излучения 1, 2 и четырех цилиндрических датчиков лазерного излучения 3, 4, 5, 6 луч 37 лазера 28 обеспечивает срабатывание фотодиодов 15 и 20. В результате этого контроллер полусферического датчика лазерного излучения 16 на своем втором входе-выходе и контроллер цилиндрических датчиков лазерного излучения 21 на своем входе-выходе генерируют коды углов пеленга и места засвеченных фотодиодов 15, 20. Эта информация поступает, соответственно, на первые входы-выходы контроллеров радиоприемопередатчик, соответственно, 18 и 22, которые кодируют полученную информацию и передают на входы-выходы радиоприемопередатчиков, соответственно, 19, 23. Эта информация транслируется и радиоприемопередатчик 10, принимая эту информацию, передает ее на восьмой вход-выход контроллера лазерной системы автоматического управления посадкой 31. Поиск датчиков лазерного излучения 1, 2, 3, 4, 5, 6 считается выполненным, если информация с цилиндрических датчиков лазерного излучения 3, 4, 5, 6 позволяет контроллеру лазерной системы автоматического управления посадкой 31 сгенерировать устойчивую «виртуальную взлетно-посадочную полосу» 38 (фиг.5) с обходом цилиндрических лазерных датчиков 3, 4, 5, 6.
С этого момента времени контроллер лазерной системы автоматического управления посадкой 31 начинает передавать данные с пятого входа-выхода на вход-выход бортовой системы регулирования углами крена, рысканья, атаки и тяги летательного аппарата 34 (фиг.4), обеспечивая выполнение этапа дальнего выравнивания летательным аппаратом (интервал ВС, фиг.5).
Процесс дальнего выравнивания летательного аппарата завершается, если «виртуальная взлетно-посадочная полоса» 38, снижаясь, касается полусферических лазерных датчиков 1, 2. С этого момента времени начинается режим ближнего выравнивания летательного аппарата (интервал CD, фиг.5). Цель режима состоит в том, чтобы траектория полета летательного аппарата с максимальной точностью совпала с продольной линией взлетно-посадочной полосы 7 и проходила через полусферические датчики лазерного излучения 1, 2. Поэтому перед моментом пролета летательного аппарата над полусферическим лазерным датчиком 2 контроллер лазерной системы автоматического управления посадкой 31 выдает команду «Контроль взлетно-посадочной полосы». Эта команда с первого и второго входов-выходов контроллера 31 поступает на первые входы-выходы, соответственно, контроллеров управления электромеханическими преобразователями 29, 30, которые, управляя электромеханическими преобразователями 25, 24 с закрепленными на их валах зеркалами, соответственно, 27, 26, луч 37 лазера 28 направляют прямо по курсу с минимальным углом атаки - α (фиг.5). Цель команды «Контроль взлетно-посадочной полосы» обеспечить облучение лучом 37 лазера 28 полусферических датчиков лазерного излучения 1, 2 и лучом 13 лазера 14 (фиг.2) - сферического датчика лазерного излучения 9 (фиг.1).
В результате реализации этого процесса информация, полученная с полусферических датчиков лазерного излучения 1, 2 и сферического датчика лазерного излучения 9, используется контроллером лазерной системы автоматического управления посадкой 31 для окончательного расчета траектории полета и скорости полета летательного аппарата вблизи взлетно-посадочной полосы 7.
Кроме этого, контроллер лазерной системы автоматического управления посадкой 31 анализирует полученные данные с датчиков лазерного излучения 1, 2, 9 и выдает команду «Приземление» или «Взлет». Если контроллером 31 выдана команда «Взлет», то с пятого входа-выхода контроллера 31 информация поступает на вход-выход бортовой системы регулирования углами атаки, крена, рысканья и тяги 34, обеспечивая взлет летательного аппарата. Если контроллер 31 выдал команду «Приземление», то с седьмого входа-выхода команда передается на вход-выход системы управления движением летательного аппарата по взлетно-посадочной полосе 36. При этом контроллер лазерной системы автоматического управления посадкой 31 выдает также команду «Луч лазера по курсу» на первый и второй свои входы-выходы. С этих входов-выходов команда поступает на первые входы-выходы контроллеров управления электромеханическими преобразователями 20, 30, которые управляют, соответственно, электромеханическими преобразователями 25, 24, и зеркала 27, 26 направляют луч 37 лазера 28 по курсу движения летательного аппарата с целью захвата датчиков лазерного излучения 1, 4, 5. Информация, поступающая с датчиков лазерного излучения 1, 4, 5, передается на радиоприемопередатчики 19, 23. Радиоприемопередатчик 10 принимает эту информацию и передает ее на восьмой вход-выход контроллера лазерной системы автоматического управления посадкой 31. Контроллер лазерной системы автоматического управления посадкой 31 обрабатывает поступающую информацию и на седьмой вход-выход выдает данные, которые поступает на вход-выход системы управления движением летательного аппарата по взлетно-посадочной полосе 36. При этом управление движением летательным аппаратом осуществляется до полной остановки летательного аппарата на продольной линии взлетно-посадочной полосы 7.
В случае посадки летательного аппарата на качающуюся платформу или палубу корабля контроллер лазерной системы автоматического управления посадкой 31, обрабатывая информацию, передаваемую датчиками лазерного излучения 1, 2, 3, 4, 5, 6, определяет параметры качки платформы или палубы корабля и выполняет расчет траектории посадки летательного аппарата на качающуюся платформу или палубу корабля. При этом контроллер лазерной системы автоматического управления посадкой 31 раскачивает летательный аппарат, приближая его параметры качки к параметрам качки платформы или палубы корабля, обеспечивая мягкую посадку летательного аппарата на платформу или палубу корабля.
Таким образом, положительный эффект изобретения заключается в повышении надежности посадки летательного аппарата за счет использования лазерной системы автоматического управления посадкой. Лазерная система автоматического управления посадкой позволяет осуществить поиск, выполнить дальнее и ближнее выравнивание летательного аппарата при подлете к взлетно-посадочной полосе, а также оценить параметры траектории движения летательного аппарата в момент посадки и движения по взлетно-посадочной полосе, что позволяет исключить вероятность влияния на посадку летательного аппарата метеоусловий и человеческого фактора.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Ю.Г.Кассин и др. Автоматическое управление самолетом при заходе на посадку. Рига, Институт инженеров ГА, 1979 г.
2. Патент США №4101893, кл. 343-108, 1978 г.
3. Патент Германии №3629911, кл. B64F 1/18, 1993 г.
4. Патенты РФ №1804629, кл. G08G 5/02, 1993 г.
5. Патент РФ №1836642, кл. G01S 13/00, 1993 г.
6. Патент РФ №2369532 С2, МПК B64F 1/18.
7. Документальный фильм «Лазерная система посадки». Режим доступа: http://www.avsim.su/f/dokumentalnie-filmi-i-syuzheti-96/lazernaya-sistema-posadki-koordinata38362.html?action=viewonline
8. Заявка Японии №56-112398, кл. B64D 45/08, 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2542820C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2483986C2 |
| СИСТЕМА ОРИЕНТАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ОТНОСИТЕЛЬНО ОСИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ (ВПП) | 2010 |
|
RU2434791C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2397115C1 |
| СИСТЕМА ИНДИКАЦИИ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) НАД ПОРОГОМ ВЗЛЕТНО - ПОСАДОЧНОЙ ПОЛОСЫ (ВПП) | 2012 |
|
RU2518891C2 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) | 2013 |
|
RU2546024C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
Изобретение относится к области авиационного приборостроения и позволяет осуществить поиск в автоматическом режиме взлетно-посадочной полосы и обеспечить автоматическое управление посадкой летательного аппарата независимо от метеоусловий и времени суток. Указанный технический результат достигают с помощью лазерной системы автоматического управления посадкой летательного аппарата, которая состоит из двух полусферических датчиков лазерного излучения, имеющих встроенные лазеры и радиоприемопередатчики, и четырех цилиндрических датчиков лазерного излучения, содержащих встроенные радиоприемопередатчики, и радиоприемопередатчика, сферического датчика лазерного излучения и лазерного излучателя. Два полусферических датчика лазерного излучения установлены по продольной линии в начале и в конце, а четыре цилиндрических датчика лазерного излучения установлены по бокам в начале и в конце взлетно-посадочной полосы, а на летательном аппарате размещены радиоприемопередатчик, сферический датчик лазерного излучения и лазерный излучатель. Повышается точность посадки и безопасность полетов. 2 з.п. ф-лы, 5 ил.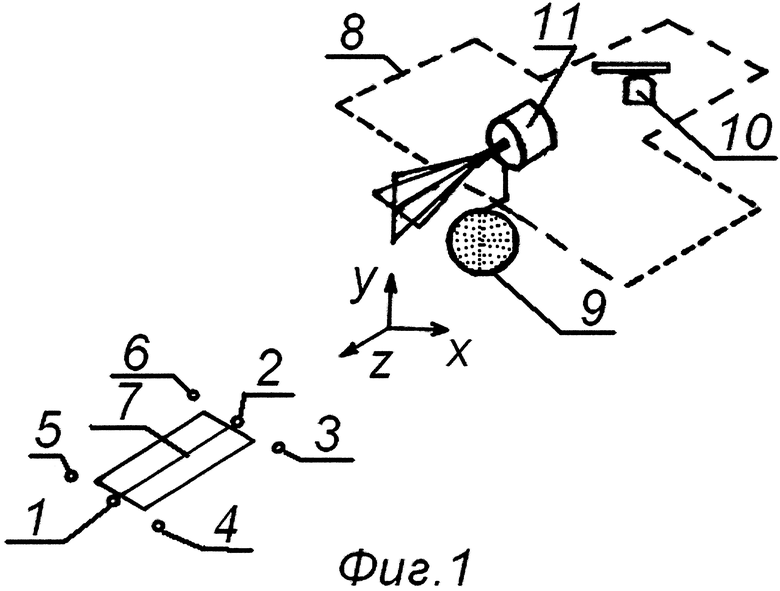
1. Способ посадки летательного аппарата, включающий автоматический поиск и выход на глиссадную траекторию штатными приводными радиолокационными и навигационными системами летательного аппарата, отличающийся тем, что, с целью повышения надежности посадки летательного аппарата, введена лазерная система автоматического управления посадкой летательного аппарата, контроллер которой первым входом-выходом соединен с первым входом-выходом первого контроллера управления первым электромеханическим преобразователем, второй вход-выход которого соединен с первым электромеханическим преобразователем, на конце вала которого укреплено первое зеркало, вторым входом-выходом контроллер подключен к первому входу-выходу второго контроллера управления вторым электромеханическим преобразователем, второй вход-выход которого подключен к второму электромеханическому преобразователю, на конце вала которого укреплено второе зеркало, третьим входом-выходом контроллер подключен к первому входу-выходу контроллера сферического датчика лазерного излучения, который вторым многоканальным входом подключен к фотодиодам, которые укреплены на поверхности сферы с дискретным шагом по углам пеленга и места, четвертый вход-выход контроллера соединен с первым входом-выходом контроллером лазера электромеханических преобразователей, второй вход-выход которого соединен с входом-выходом лазера электромеханических преобразователей, пятый вход-выход контролера подключен к входу-выходу системы регулирования углами атаки, крена, рысканья и тяги летательного аппарата, шестой вход-выход контроллера соединен с входом-выходом штатных приводных радиолокационно-навигационных систем, седьмой вход-выход контроллера подключен к входу-выходу системы управления движением летательного аппарата по взлетно-посадочной полосе, восьмой вход-выход контроллера соединен с входом-выходом радиоприемопередатчика, который обеспечивает радиосвязь с радиоприемопередатчиками идентичных двух полусферических датчиков лазерного излучения и четырех цилиндрических датчиков лазерного излучения, вход-выход радиоприемопередатчика полусферического датчика лазерного излучения подключен к второму входу-выходу контроллера радиоприемопередатчика, первый его вход-выход соединен со вторым входом-выходом контроллера полусферического датчика лазерного излучения, к многоканальному входу которого подключены фотодиоды, которые укреплены на поверхности полусферы с дискретным шагом по углам пеленга и места, первый вход-выход контроллера полусферического датчика лазерного излучения подключен к первому входу-выходу контроллера лазера полусферического датчика лазерного излучения, второй вход-выход которого соединен с входом-выходом лазера полусферического датчика лазерного излучения, вход-выход радиоприемопередатчика цилиндрического датчика лазерного излучения подключен к второму входу-выходу контроллера радиоприемопередатчика, первый вход-выход его соединен с входом-выходом контроллера цилиндрического датчика лазерного излучения, многоканальный вход которого соединен с фотодиодами, которые укреплены на поверхности цилиндра с дискретным шагом по углам пеленга и места.
2. Способ посадки летательного аппарата по п.1, отличающийся тем, что полусферические и цилиндрические датчики лазерного излучения располагаются по периметру платформы посадки вертолета.
3. Способ посадки летательного аппарата по п.1, отличающийся тем, что при облучении летательного аппарата лучом постороннего лазера контроллер лазерной системы автоматического управления посадкой летательного аппарата периодически направляет луч лазера с углами пеленга и места на источник лазерного излучения.
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2007 |
|
RU2369532C2 |
| Способ определения положения осевой линии взлетно-посадочной полосы | 1991 |
|
SU1804629A3 |
| US 4868567 A1, 19.09.1989 | |||
| Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления | 1991 |
|
SU1836642A3 |
| US 4101893 A1, 18.07.1978. | |||

