Изобретение относится к навигации и может быть использовано для автоматического управления посадкой летательного аппарата (ЛА), коррекции инерциальных навигационных систем ЛА в процессе их взлета.
Оптические устройства дистанционного определения ориентации подвижных объектов содержат размещаемые на подвижном объекте реперные источники излучения (РИ) и оптико-локационные блоки (ОЛБ), размещаемые на базовом (неподвижном) основании, относительно которого производится определение ориентации подвижного объекта.
Оптико-локационные блоки определяют направления на отдельные РИ (углы-пеленги РИ), используя которые определяют ориентацию подвижных объектов. В ОЛБ широко используются двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1]. В классической стереоскопической схеме построения устройств определения ориентации подвижных объектов измеряют углы-пеленги РИ с двух точек, разнесенных на известное расстояние, затем определяют координаты РИ и ориентацию подвижного объекта.
Известен способ локации источников излучения [2], размещаемых на подвижных объектах, в котором предусматривается использование двух цилиндрических объективов-анаморфотов для формирования изображений РИ в плоскости линейки фотодетекторов. Определив координату изображения РИ и зная фокусное расстояние цилиндрического объектива, определяют угол-пеленг РИ. Используя полученные данные, зная расстояние между формирователями изображения (точками, относительно которых производятся отсчеты углов-пеленгов), вычисляют координаты РИ.
Измерение ориентации подвижного объекта производится в три этапа:
определение углов-пеленгов;
вычисление координат РИ (точек M1 и М2);
вычисление ориентации подвижного объекта с использованием полученных значений координат РИ.
Недостатком является применение двух ОЛБ, причем они размещены на неподвижном основании (что соответствует размещению на земле применительно к задаче обеспечения посадки ЛА).
Известно устройство определения положения ЛА в пространстве с помощью мобильной лазерной трехцветной навигационной системы [2], принцип действия которого состоит в формировании цветовых зон в окрестности посадочной траектории и визуальном восприятии летчиком излучения в заданной длине волны. Устройство содержит два источника оптического излучения, разнесенные в пространстве, образуя, таким образом, три зоны, покрытые оптическим излучением только одной длины волны. Каждый источник позволяет получить не менее двух неперекрывающихся пучков оптического излучения с различными длинами волн. Оптические пучки с совпадающими диапазонами длин волн перекрываются в зоне створа. Вне зоны створа эти пучки перекрываются с пучками оптического излучения иных диапазонов длин волн.
Устройство включает наземную часть, состоящую из первичного источника питания, высоковольтного импульсного источника накачки, блока управления, трехцветного катода импульсного полупроводникового лазера с электронной накачкой, оптического блока, объектива, блока встроенного контроля.
Недостатками данного устройства являются недостаточная точность, поскольку положение ЛА относительно оси взлетно-посадочной полосы (ВПП) в пределах одной цветовой зоны является неопределенным. Кроме этого, положение ЛА оценивается летчиком визуально, что приводит к необходимости участия человека в контуре управления самолетом, при этом автоматическая посадка невозможна.
Технической задачей изобретения является повышение точности измерения местоположения ЛА относительно оси ВПП, обеспечение дополнительного измерения углов рыскания, крена, тангажа, а также автоматизация процесса измерения этих параметров.
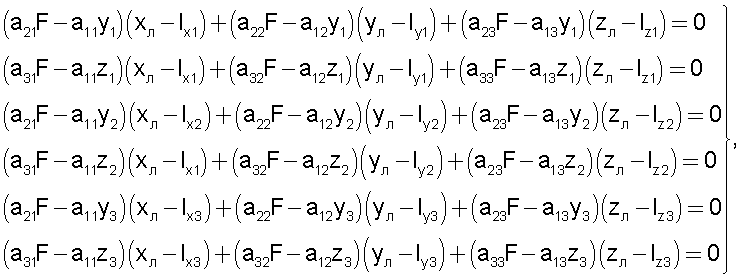
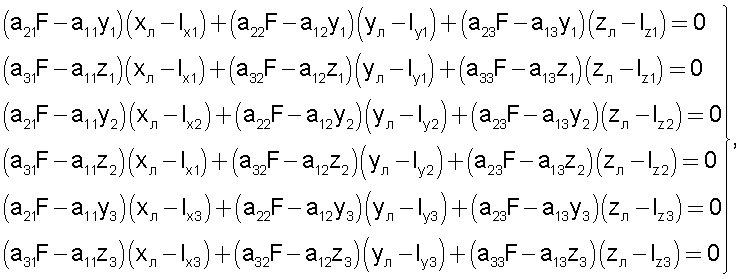
Решение технической задачи состоит в том, что в способе определения местоположения и углов ориентации ЛА относительно оси ВПП (угла рыскания, крена, тангажа), основанном на вычислении параметров положения подвижного объекта, регистрируют излучения каждого из трех одинаковых лазерных маяков с известными координатами, установленными вдоль взлетно-посадочной полосы (ВПП), на полосах безопасности посредством приемника излучения лазеров, установленного на бортовой части летательного аппарата (ЛА) и выполненного в виде плоской фотоматрицы, размещенной в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения лазерных маяков, снимаемого с фотоматрицы для определения координат изображений лазерных маяков, при этом определяют координаты: дальность до точки касания, высоту полета, боковое отклонение от оси ВПП, и углы ориентации ЛА: углы рыскания, крена и тангажа, путем решения системы нелинейных алгебраических уравнений:
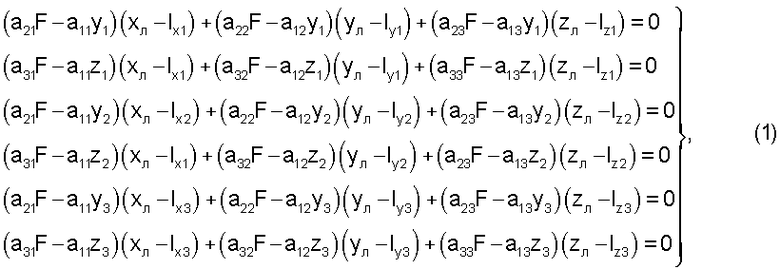
где F - фокусное расстояние объектива;
lxn, lyn, lzn - расстояния, определяющие расположение лазерных маяков относительно точки касания по продольной вертикальной и поперечной осям ВПП (n=1, 2, 3 - номер лазерного маяка);
Уn, zn - координаты изображений лазерных маяков, сформированных на фотоматрице;
aij - элементы матрицы направляющих косинусов А вида

где ψ, γ, υ - углы рыскания, крена и тангажа ЛА соответственно;
xл, ул, zл - координаты ЛА относительно ВПП.
Заявляемый способ осуществляется при помощи устройства для определения местоположения и углов ориентации летательного аппарата относительно взлетно-посадочной полосы, включающего наземную лазерную систему для формирования области излучения посадочной траектории, для достижения технического результата наземная лазерная система содержит совокупность из трех разнесенных одинаковых лазерных маяков с известными координатами, установленными вдоль взлетно-посадочной полосы на полосах безопасности, а бортовая часть летательного аппарата содержит модуль приемника излучения лазеров, выполненный в виде фотообъектива и плоской фотоматрицы, и вычислитель, включающий в себя модуль обработки оцифрованного изображения лазерных маяков и модуль вычисления координат ЛА, при этом модуль обработки оцифрованного изображения лазерных маяков, где определяют координаты изображений лазерных маяков, своим входом связан с фотоматрицей, на которой с помощью фотообъектива формируются изображения лазерных маяков, а своим выходом связан с модулем вычисления координат ЛА, где путем решения системы нелинейных алгебраических уравнений определяют координаты: дальность до точки касания, высоту полета, боковое отклонение от оси ВПП, и углы ориентации ЛА: углы рыскания, крена и тангажа.
Технический результат при использовании заявляемых способа и устройства заключается в повышении точности определения местоположения ЛА относительно ВПП и дополнительном определении углов ориентации ЛА, достигаемой за счет использования трех ИК лазерных маяков, модуля приемника излучений лазеров, вычислителя, в модуле обработки оцифрованного изображения лазерных маяков которого производится определение координат изображений лазерных маяков на фотоматрице, в модуле вычисления координат ЛА осуществляется численное решение системы нелинейных алгебраических уравнений относительно искомых координат ЛА - ψ, γ, υ, xл, ул, zл.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
определение координат изображений лазерных маяков на фотоматрице;
вычисление значений угла рыскания, крена, тангажа, дальности, высоты и бокового отклонения летательного аппарата по информации, полученной с приемника излучений лазерных маяков.
По устройству, наличие следующих элементов:
совокупности трех разнесенных одинаковых ИК лазерных маяков;
модуля приемника излучений лазеров;
вычислителя.
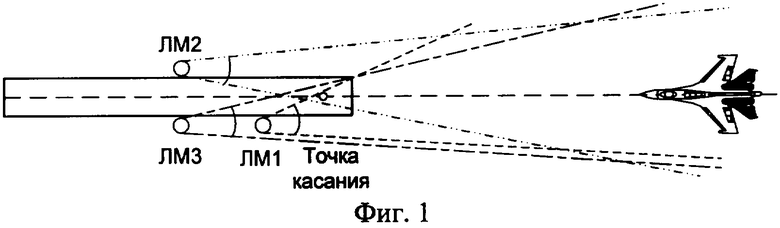
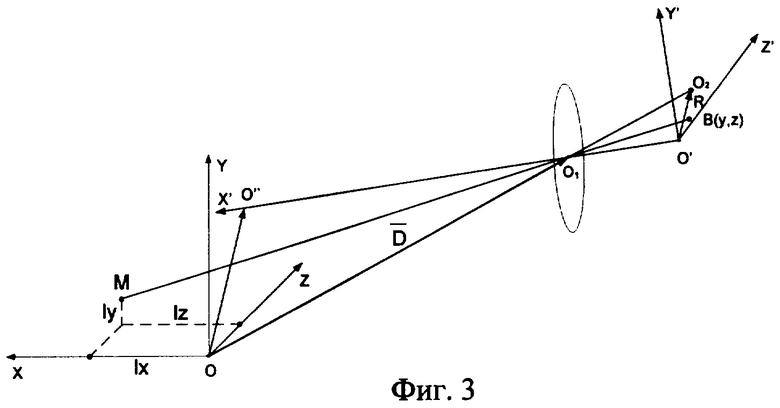
На фиг.1 показана схема размещения лазерных маяков и ЛА с установленным на нем оборудованием в процессе определения местоположения относительно ВПП и углов ориентации ЛА; на фиг.2 - структурная схема устройства, реализующего предлагаемый способ; на фиг.3 - расположение приемника излучения относительно маяков.
Способ реализуется следующим образом. Неподвижная прямоугольная система координат OXYZ связана с ВПП (фиг.3), точка О совпадает с точкой касания (фиг.2), ось ОХ - с осью ВПП, ось OY - вертикаль. Система координат O'X'Y'Z' - подвижная система, связанная с геометрическим центром фотоматрицы, где ось O'Х' направлена по оптической оси объектива, ось O'Y'направлена вверх перпендикулярно горизонтальной стороны фотоматрицы, ось O'Z' перпендикулярна осям O'Х', O'У' добавляя их до правой системы координат. Для перехода от системы координат OXYZ к O'X'YZ' используется матрица направляющих косинусов А:
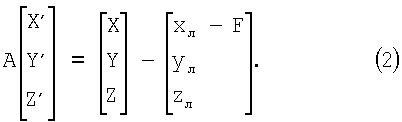
Вектор, описывающий геометрический центр фотоматрицы в системе OXYZ (точка О'), обозначим D:
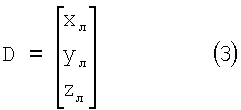
где xл, ул, zл - дальность, высота, боковое отклонение соответственно.
Для нахождения координат изображения начала координат (точки О) в фокальной плоскости на фотоматрице находят вектор R, для чего вектор D проецируют на ось O'Х', для этого умножают его скалярно на единичный вектор  . Полученная проекция вектора D (i·xл+j·ул+k·zл)·i' вместе с самим вектором D образуют треугольник, подобный треугольнику O1O"О'. Из подобия треугольников следует, что O1O'/О'O2=O1O"/OO".
. Полученная проекция вектора D (i·xл+j·ул+k·zл)·i' вместе с самим вектором D образуют треугольник, подобный треугольнику O1O"О'. Из подобия треугольников следует, что O1O'/О'O2=O1O"/OO".
Поэтому для коллинеарных векторов R и О1О" записывают

Используя известные соотношения, связывающие орты i, j, k и i', j', k' двух систем координат
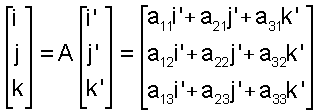
подставим выражения для i, j, k в правую часть соотношения (4), получим

Точка O2 представляет собой изображение начала координат системы OXYZ. Для получения выражения, описывающего изображение точки М в системе координат OXYZ в выражении (7), вместо координат xл, ул, zл вектора D, подставляют координаты хл-lx,ул-lу,zл-lz вектора МО1.
Откуда находят координаты изображения n-го маяка на фотоматрице с учетом его координат lxn, lyn, lzn в системе OXYZ:


Обе части полученных равенств умножают на знаменатель правой части и переносят все слагаемые в левую часть.
После преобразований выражений (6) и (7) они записываются трижды для значений n=1, 2 и 3, таким образом, составляется исходная система уравнений (1). Путем решения этой нелинейной системы алгебраических уравнений вычисляются дальность - хл, высота - ул, боковое отклонение - zл, углы рыскания - ψ, крена - γ и тангажа - υ летательного аппарата.
Решение системы уравнений (1) осуществляется одним из численных методов [4], например методом простых итераций, Ньютона, Брауна или наискорейшего спуска. Программное обеспечение численных методов решения систем нелинейных уравнений известно на многих языках программирования, в том числе для пакета Mathcad (например, функция minerr [5]).
Устройство содержит совокупность лазерных маяков 1, включающую лазеры 4, 5, 6, модуль приемника излучений лазеров 2, содержащий объектив 7 и фотоматрицу 8, вычислитель 3, включающий модуль обработки оцифрованного изображения лазерных маяков 9 и модуль вычисления координат 10.
Устройство работает следующим образом.
Излучение лазеров 4, 5, 6 модуля лазерных маяков 1 регистрирует модуль приемника излучений лазеров 2 с помощью объектива 7, формирующего на фотоматрице 8 изображение ВПП и трех лазеров. В модуле 9 обработки оцифрованного изображения лазерных маяков, где осуществляется поочередное сравнение величин R, G, В кодов пикселей фотоматрицы с их значениями, соответствующими изображению лазера маяка, определяют коды координат изображений лазерных маяков 4, 5, 6, которые используются для вычисления в модуле вычисления координат 10 ЛА его местоположения относительно ВПП: дальности хл, высоты ул, бокового отклонения ze и углов ориентации - рыскания ψ, крена γ и тангажа υ, путем решения системы уравнений (1), полученной в предлагаемом способе определения местоположения относительно ВПП и углов ориентации ЛА.
Указанное утверждение в отношении повышения точности определения перечисленных параметров достигается за счет использования прецизионных датчиков информации, автоматизации процессов съема и обработки информации.
Источники информации
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - С.168.
2. Патент РФ на изобретение №2083444 на изобретение, кл. G01S 5/08, 22.03.1994 (прототип).
3. Олихов И.М., Косовский Л. Системы навигации. Журнал: ЭЛЕКТРОНИКА - Наука, Технология, Бизнес, 3/99.
4. Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. - М.: Наука, 1987. - С.212-213.
5. Дьяконов В.П. Справочник по MathCAD PLUS 6.0 PRO. - M.: «CK Пресс», 1997. - С.152-154.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2706443C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА И КООРДИНАТ САМОЛЕТА | 2007 |
|
RU2356012C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
Изобретение относится к определению местоположения летательного аппарата с использованием нескольких разнесенных источников излучения. Достигаемым техническим результатом является повышение точности измерения координат летательного аппарата. Сущность способа заключается в том, что сигналы трех лазерных маяков, установленных на аэродроме вблизи взлетно-посадочной полосы на полосах безопасности в точках с известными координатами, регистрирует приемник излучения, установленный на летательном аппарате, при этом определяют местоположение относительно взлетно-посадочной полосы и углы ориентации летательного аппарата. Устройство, реализующее заявленный способ, содержит совокупность лазерных маяков, приемник излучений лазерных маяков, содержащий фотообъектив и плоскую фотоматрицу, а также вычислитель, предназначенный для обработки изображения и вычисления координат летательного аппарата. 2 н.п. ф-лы, 3 ил.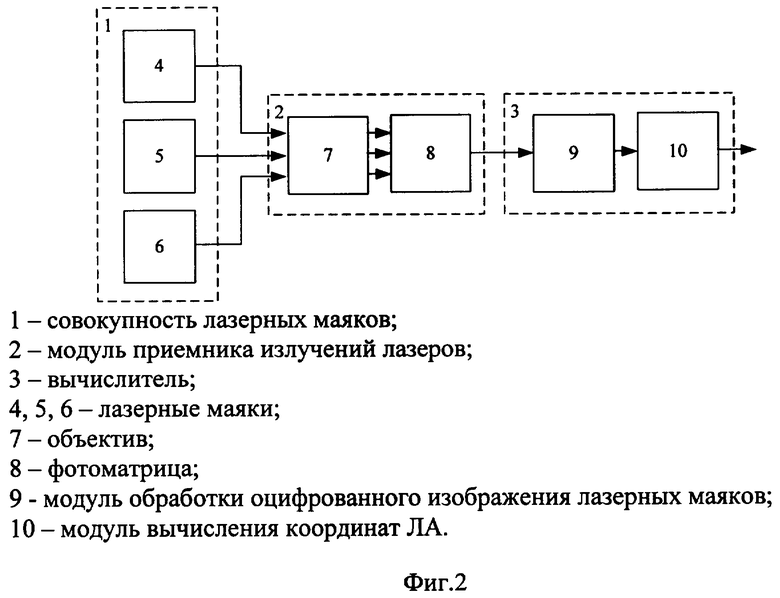
где F - фокусное расстояние фотообъектива;
lxn, lyn, lzn - расстояния, определяющие расположение лазерных маяков относительно точки касания по продольной вертикальной и поперечной осям ВПП (n=1, 2, 3 - номер лазерного маяка);
уn, zn - координаты изображений лазерных маяков, сформированных на плоской фотоматрице;
аij - элементы матрицы направляющих косинусов А вида

где ψ, γ, υ - углы рыскания, крена и тангажа ЛА соответственно;
xл, ул, zл - координаты ЛА относительно ВПП.
где F - фокусное расстояние фотообъектива;
lxn, lyn, lzn - расстояния, определяющие расположение лазерных маяков относительно точки касания по продольной вертикальной и поперечной осям ВПП (n=1, 2, 3 - номер лазерного маяка);
уn, zn - координаты изображений лазерных маяков, сформированных на плоской фотоматрице;
аij - элементы матрицы направляющих косинусов А вида

где ψ, γ, υ - углы рыскания, крена и тангажа ЛА соответственно;
xл, ул, zл - координаты ЛА относительно ВПП.
| ОПТИЧЕСКОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2083444C1 |
| Способ определения навигационных параметров для выполнения посадки летательного аппарата на дрейфующую льдину | 1990 |
|
SU1779934A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282866C1 |
| WO 2006135916 A1, 21.12/2006 | |||
| US 2006227014 A1, 12.10/2006 | |||
| US 2005088642 A1, 28.04.2005 | |||
| WO 03098260 A1, 27.11.2003. | |||

