Область техники, к которой относится изобретение
Настоящее изобретение относится к системе раннего измерения турбулентности перед летательным аппаратом.
В дальнейшем в описании рассматриваемый летательный аппарат является, например, самолетом.
Уровень техники
В пассажирских самолетах, предназначенных для перевозки более 100 пассажиров, средства минимизирования воздействия турбулентности основаны на датчиках, измеряющих ответную реакцию самолета при его вхождении в зону турбулентности или позволяющих рассчитать составляющие ветра, когда он достигает самолета. Минимизацию воздействия турбулентности обычно осуществляют путем снижения коэффициентов нагрузки и угловых скоростей самолета, на которые влияет турбулентность, с целью уменьшения появляющихся вибраций конструкции для улучшения комфорта пассажиров и, наконец, путем снижения сил, действующих на конструкцию самолета. Средства измерения, установленные на носу самолета, позволяют получить опережение по времени относительно момента, когда крыло встречает ветер. Однако даже для самых больших лайнеров расстояние между носом самолета и его крылом не позволяет получить опережения по времени более чем в 100 мс. Скорость срабатывания современных приводов не позволяет получить полное отклонение плоскостей управления и, следовательно, оптимальной эффективности, в частности, законов, снижающих нагрузки или повышающих комфорт пассажиров. Эту эффективность можно повысить путем установки более быстрых приводов или путем сохранения современных приводов и измерения скорости ветра перед самолетом. Информацию о датчиках и методах, используемых в настоящее время в гражданской авиации, можно найти во многих документах. Например, можно указать ссылку [1] в конце описания.
Для устранения недостатков известных технических решений настоящим изобретением предлагается измерять при помощи лидара (LIDAR = "Light Detection and Ranging", то есть детектирование при помощи световых волн и телеметрии) скорость ветра впереди летательного аппарата на расстоянии, достаточном, чтобы при помощи системы управления полетом успеть привести в действие плоскости управления летательного аппарата с опережением по времени по сравнению с системами, использующими обычные данные ADC («Вычислитель воздушных параметров"), IRS ("Опорная инерциальная система") и т.д.
Необходимо заметить, что использование лидара для ослабления последствий вхождения летательного аппарата в зону турбулентности рассматривается в ссылке [2].
Раскрытие изобретения
Объектом настоящего изобретения является система раннего измерения турбулентности перед летательным аппаратом, например перед самолетом, установленная на борту самолета, отличающаяся тем, что содержит:
- лидар, например, ультрафиолетовый лидар, излучающий оптический пучок перед самолетом и принимающий обратно рассеянный оптический пучок;
- устройство прямого детектирования, взаимодействующее со средствами управления;
- первый блок обработки, использующий первый алгоритм внутренних коррекций; и
- второй блок обработки, использующий второй алгоритм внешних коррекций, выдающий, в случае необходимости, командные сигналы приводам, по меньшей мере, одной плоскости управления летательного аппарата.
Предпочтительно система в соответствии с настоящим изобретением содержит оптическую приемопередающую часть и принимающую часть.
Оптическая часть содержит:
- лазер;
- в случае необходимости, умножитель частоты;
- затвор;
- систему призмы и вращающихся зеркал;
- телескоп;
- окно, обработанное для выбранной частоты лазера;
- оптическое волокно.
Принимающая часть содержит:
- оптическое волокно;
- эталон Фабри-Перо, установленный между двумя оптическими линзами;
- фильтр;
- усилитель яркости изображения;
- датчик изображений и блок обработки, использующий первый алгоритм.
Система в соответствии с настоящим изобретением отличается от решения, известного из документа [2], в частности, следующими признаками:
- прямое детектирование (в ссылке [2] предусмотрено только когерентное детектирование);
- коррекция воздействий боковых и осевых скоростей возмущений.
Недавние опыты показали, что влияние этих составляющих начинает ощущаться, во-первых, за счет все более эффективной коррекции вертикальных составляющих и, во-вторых, за счет увеличения длины самолетов (в ссылке [2] предусмотрена только коррекция вертикальной скорости).
Система в соответствии с настоящим изобретением отличается следующими преимуществами.
- Использование лидара ультрафиолетового излучения позволяет получить лучшие характеристики, чем с инфракрасным лидаром. Этот лидар может быть выполнен с инфракрасным диодом и с умножителем частоты или с ультрафиолетовым диодом. Информация по лидарной технологии представлена в ссылке [3].
- Применение системы прямого детектирования позволяет использовать обратное рассеяние по Маю и Рейлею (обратное рассеяние на аэрозолях и молекулах). Таким образом, становится возможным измерение в прозрачном воздухе. Такое прямое детектирование раскрыто в ссылке [3].
- Использование очень короткого (10 нс) лидарного импульса управления позволяет получить очень малый объем измерения и, таким образом, иметь четко локализованную в пространстве информацию о скорости.
- Использование только одного лазера со сканированием по нескольким точкам для получения данных скорости (доплеровский лидар позволяет получать данные скорости только на линии прицеливания лазера). Возможный вариант системы сканирования описан в документе [4].
- Использование этого лидара на летательном аппарате позволяет получить три составляющих скорости ветра с временным опережением по фазе d/V, где d - дальность прицеливания, а V - скорость самолета. Измеряемая скорость находится в зоне спереди по ходу самолета на расстоянии, превышающем или равном 500 футов (примерно 150 м). Таким образом, измерение характеризует встречаемое на пути возмущение при предположении стационарности в течение времени d/V.
- Использование данных скорости ветра в сочетании с параметрами самолета позволяет определить команды, подаваемые на плоскости управления:
- для снижения размерных нагрузок: снижают самые значительные нагрузки, которые будут действовать на летательный аппарат при встрече с зоной большой турбулентности. Таким образом, можно уменьшить массу конструкции самолета;
- для снижения усталостных нагрузок: снижают усилия, действующие на крыло в случае попадания в зону турбулентности, чтобы получаемые в результате усилия соответствовали меньшим циклам усталости; таким образом, повышают срок службы конструкции;
- для повышения комфорта пассажиров: в этом плане снижается обратная реакция, характеризующаяся ускорениями гибких частей фюзеляжа, чтобы даже при входе в зону небольшой турбулентности пассажиры не ощущали вибраций.
- Закон управления, связанный с системой детектирования, может быть законом управления в режиме открытого или замкнутого контура.
- Становится возможным применение команд, наиболее соответствующих предусматриваемому управлению приводами плоскостей управления летательного аппарата.
Краткое описание чертежей
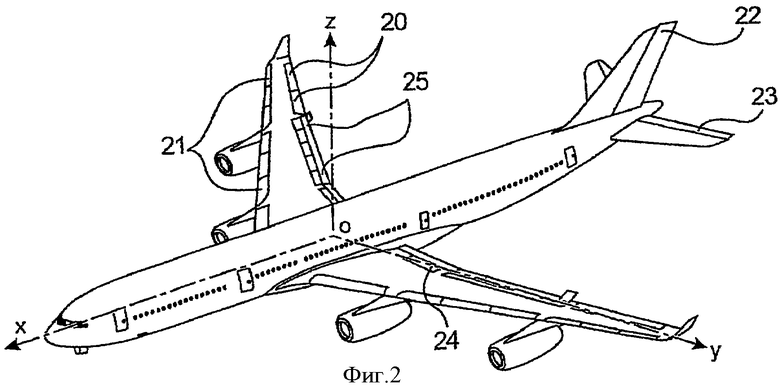
Фиг.1 - система в соответствии с настоящим изобретением, установленная на самолете.
Фиг.2 - вид различных плоскостей управления самолета.
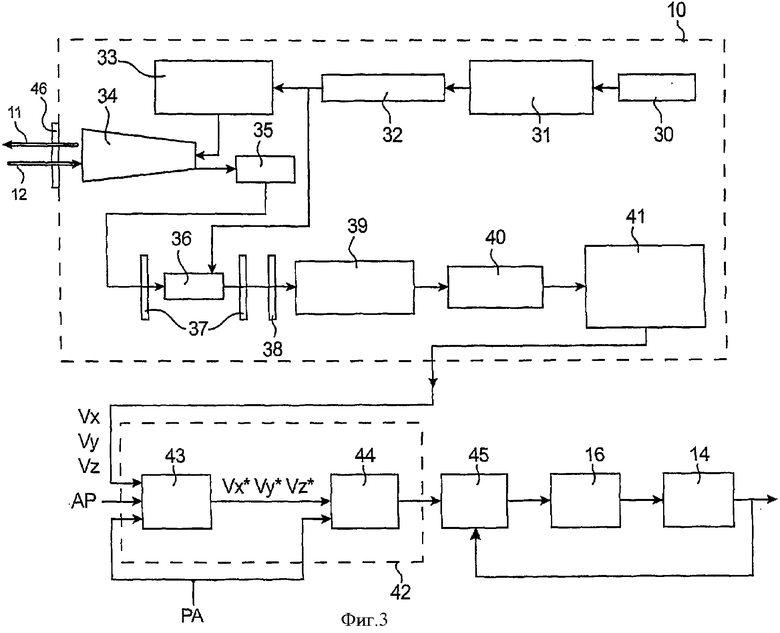
Фиг.3 - принцип работы системы в соответствии с настоящим изобретением в режиме открытого контура.
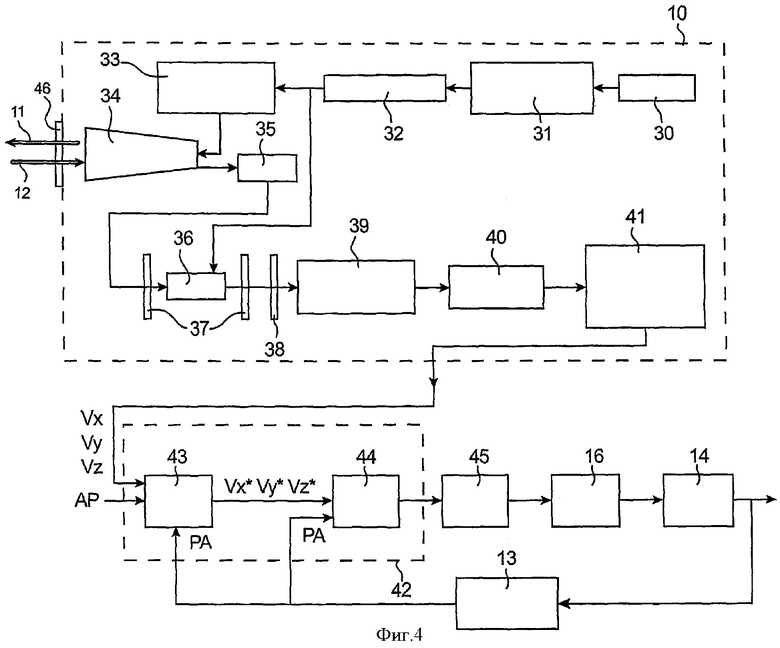
Фиг.4 - принцип работы системы в соответствии с настоящим изобретением в режиме закрытого контура.
Фиг.5 - система сканирования, входящая в состав системы в соответствии с настоящим изобретением.
Осуществление изобретения
Как показано на фиг.1, в системе в соответствии с настоящим изобретением сигналы, исходящие от лидара 10, излучающего лазерный пучок 11 перед самолетом и принимающего пучок 12 обратного рассеяния, а также сигналы, исходящие от датчиков 13 самолета 14, поступают в вычислительное устройство 15 управления полетом, которое выдает команды на плоскости 16 управления.
Как показано на фиг.2, этими плоскостями 16 управления являются:
- элероны 20, которые являются плоскостями управления крена или поперечного управления, создающими момент относительно оси Ох (ось самолета);
- предкрылки 21, используемые при взлете или посадке для задержки момента срыва потока на крыле;
- руль 22 направления, который является плоскостью управления поворотом относительно вертикальной оси или рулем направления, создающим момент относительно оси Oz;
- рули 23 высоты, которые являются плоскостями управления продольного наклона или высоты, создающими момент относительно оси Оу;
- интерпепторы 24, которые главным образом используются при посадке для сохранения самолета в прижатом к полосе положении и для повышения эффективности торможения и которые могут быть использованы во время полета для экстренного снижения;
- закрылки 25, которые используются при взлете и посадке для получения дополнительной подъемной силы на малых скоростях;
- скоростные плоскости управления, такие как мини-ТЕДы ("Trailing Edge Devices" устройства задней кромки) или «сакураи» (см. документ [6]), которые могут также использоваться для прямого управления подъемной силой.
На этой фигуре точка О является центром тяжести самолета.
Как показано на фиг.3 и 4, система в соответствии с настоящим изобретением содержит лидар 10, содержащий приемопередающую оптическую часть и принимающую часть.
Оптическая часть содержит:
- лазер 30;
- в случае необходимости, умножитель 31 частоты;
- затвор 32;
- систему 33 призмы и вращающихся зеркал;
- телескоп 34;
- окно 46, обработанное для выбранной частоты лазера;
- оптическое волокно 35.
Принимающая часть содержит:
- эталон Фабри-Перо 36, установленный между двумя оптическими линзами 37;
- фильтр 38;
- усилитель 39 яркости изображения;
- датчик 40 изображений и блок 41 обработки, использующий первый алгоритм (внутренние коррекции).
Система в соответствии с настоящим изобретением соединена с вычислительными устройствами 42 управления полетом, которые осуществляют:
- коррекцию скоростей 43 с использованием расчетных скоростей ветра Vx, Vy и Vz, действий АР пилота и квазистатических параметров РА самолета (масса, центр тяжести, Vtas, Vcas, угловые скорости);
- вычислительное устройство 44, определяющее команды на рули на основании угловых скоростей и ускорений;
- законы управления 45 самолетом, использующие «квазистатические» параметры РА самолета (масса, центр тяжести, Vtas, Vcas, угловые скорости, ускорения).
Передающая оптическая часть позволяет подавать на лазер 30 очень короткие импульсы (например, порядка 10 нс) требуемой энергии для получения необходимой дальности измерения. Используемый лазерный пучок предпочтительно находится в ближней ультрафиолетовой области спектра и позволяет получить хорошее качество сигнала за счет короткой длины волны.
После этого выходной пучок 11 разделяется системой 33 призмы и вращающихся зеркал. Эта система 33, как показано на фиг.5, направляет пучок 50 на призму 51 через зеркала 52, 53 и 54 и позволяет разделить выходной пучок на пучок, который будет сканировать поочередно одно из четырех возможных направлений, и, таким образом, измерять скорость по четырем направлениям под +/-α° относительно оси Ох самолета; чем больше угол, тем выше точность. Например, выбирают угол 10°. Новое направление выбирают каждые 15 мс. Таким образом, за 60 мс происходит полный цикл сканирования ABCD.
После этого пучок проходит в телескоп 34, который сохраняет очень слабое расхождение пучка (порядка 1 мрад). Этот пучок проходит затем через окно 46, обработанное для получения повышенного коэффициента прохождения для выбранной длины волны, и попадает в атмосферу.
Излученный пучок 11 попадает на частицы и молекулы атмосферы, находящиеся на его пути. Часть этого сигнала претерпевает обратное рассеяние (сигнал 12) и попадает в телескоп 34.
Затвор 32 позволяет принимать только информацию, содержащуюся во временном объеме, находящемся в пределах от 2 d/c и 2 (d/c+τ), где d - требуемая дальность прицеливания, с - скорость света, τ - продолжительность каждого импульса.
В принимающей оптической части данные, содержащиеся в пучке 12, делятся на пакеты по 15 мс, соответствующие каждому отдельному направлению. После этого принятый пучок проходит через оптическое волокно 35 и попадает в принимающую часть.
Эта принимающая часть является центром обработки информации. Она содержит эталон Фабри-Перо 36, который позволяет создавать интерференционные кольца. Датчик 40 изображений, например камера ПЗС, позволяет зафиксировать изменения размера различных колец, связанные с изменениями скорости ветра перед самолетом.
Первый алгоритм обрабатывает данные изменения диаметра колец на основании этих первичных изображений. Другие внутренние и внешние параметры лазерной системы (температура, мощность излучения, положение телескопа относительно опорных точек самолета и т.д.) также необходимы для вычисления составляющих относительной скорости ветра. Система обработки информации описана в документе [5].
Эти составляющие скорости передаются в вычислительные устройства 42 самолета, в которых хранятся данные о действиях АР пилота и текущем состоянии РА самолета (например, коэффициенты нагрузки, угловые скорости самолета и т.д.). Второй алгоритм затем использует данные скорости, полученные с помощью первого алгоритма, и данные самолета (Tas или "True Air Speed" (истинная скорость самолета), команды пилота, коэффициенты нагрузки (главным образом nz)) для определения амплитуды встреченного возмущения.
Этот второй алгоритм позволяет:
- «вычитать» скорости, возникающие из-за механического перемещения самолета в полете, из скоростей Vx, Vy и Vz;
- вырабатывать команды на плоскости управления, позволяющие минимизировать обратные реакции самолета и снижать нагрузки в зависимости от выбранных команд.
Как показано на фиг.3 и 4, этот второй алгоритм можно использовать при условии осуществления некоторых модификаций для работы в режиме открытого контура или в режиме замкнутого контура.
1) Открытый контур
В этом режиме, как показано на фиг.3, используют чистую информацию о турбулентности для подачи команд на рули 16 управления полетом самолета 14. При этом не происходит обратной связи с инерциальными или анемометрическими данными самолета 14.
В качестве примера рассмотрим самолет, совершающий полет на крейсерской скорости, при nz=lg с известной скоростью Vtas. Лидар измеряет скорость V, которая может быть равной или не равной Vtas. Если мы имеет вертикальный ветер Vzvent, то Vzvent=Vzalgo(Vz алгоритм) - Vztas. Этот вертикальный ветер влияет на подъемную силу, угол атаки и коэффициент нагрузки самолета.
После вычисления составляющих скорости ветра второй алгоритм позволяет минимизировать воздействие ветра на самолет.
Для этого подается команда на рули управления полетом. В данном примере рули управления отклоняют на x°, что позволяет предупредить воздействие ветра на самолет. В самой простой форме, описанной в примере, команду, подаваемую на рули управления полетом в режиме открытого контура, можно представить в следующем виде:
δQ=K((ω)Vzvent.
2) Закрытый контур
В данном случае, как показано на фиг.4, используют информацию о составляющих ветра, поступающую от лидара, а также о влиянии команды, поданной на рули 16 управления полетом, на поведение самолета с использованием всех необходимых датчиков 13, имеющихся на самолете 14.
Не прибегая к упрощающим предположениям и учитывая три составляющих ветра, подаваемую на рули управления полетом команду можно представить в следующем виде:

где ω: вибрация,
δp: угол отклонения плоскостей управления крена,
δq: угол отклонения плоскостей управления продольного наклона,
δr: угол отклонения плоскостей управления поворота относительно вертикальной оси,
nx, ny, nz: коэффициенты нагрузки по осям X, Y, Z.
Различные коэффициенты kii могут содержать или не содержать активирующие логические схемы в зависимости от преследуемой цели. Матрицы K1 и K2 (матрицы 3×3) могут также содержать активирующие логические схемы и задержки.
Понятно, что описанный вариант представлен в качестве примера и описание может быть распространено на другие плоскости и типы управления. Несмотря на то, что в настоящем описании были использованы специальные термины, они носят только описательный, а не ограничительный характер.
Источники информации
[1] «Les avions de transport modemes et futures» (Peyrat-Armandy, A.Teknès, стр.315-325, 1997).
[2] «Coherent lidar turbulence measurement for gust load alleviation» D.Loreide, R.K.Bogne, L.D.Ehernberger, H.Bagley (NASA-TM-104318, август 1996).
[3] «Imaging techniques and systems: lidar» P.S.Argall, R.J.Sica (Encyclopedia of Imaging Science and Technology J.Homak, New York, Wiley, 869-889,2002).
[4] WO 2004/003626.
[5] DE 10316762.
[6] US 6601801.

Настоящее изобретение относится к системе раннего измерения турбулентности перед летательным аппаратом. Техническим результатом изобретения является измерение скорости ветра впереди летательного аппарата на расстоянии, достаточном, чтобы успеть привести в действие плоскости управления летательного аппарата с опережением по времени. Система раннего измерения турбулентности содержит лидар, излучающий оптический пучок вперед перед летательным аппаратом и принимающий обратно рассеянный оптический пучок, устройство прямого детектирования, связанное со средствами управления, первый блок обработки, использующий первый алгоритм с внутренней коррекцией, и второй блок обработки, использующий второй алгоритм с внешней коррекцией, выдающий, в случае необходимости, командные сигналы для приводов, по меньшей мере, одной плоскости управления летательного аппарата. 5 з.п. ф-лы, 5 ил.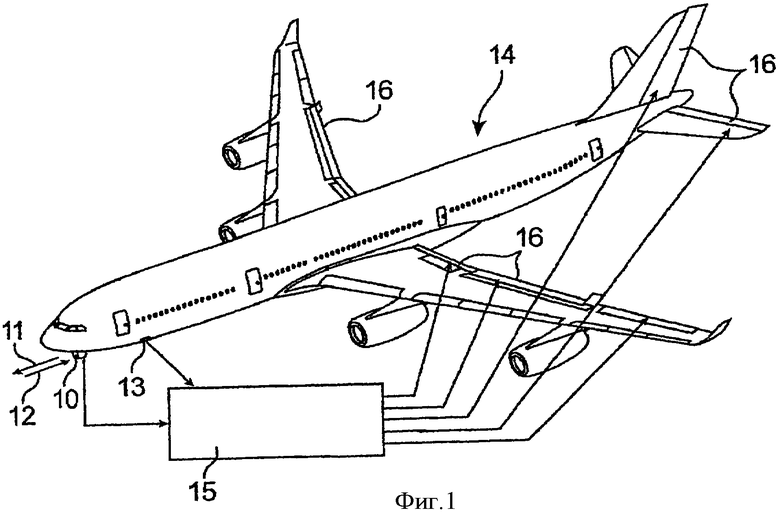
1. Система раннего измерения турбулентности перед летательным аппаратом, установленная на его борту, отличающаяся тем, что содержит
лидар, излучающий оптический пучок вперед перед летательным аппаратом и принимающий обратно рассеянный оптический пучок, с устройством прямого детектирования, связанным со средствами управления;
первый блок обработки, использующий первый алгоритм для определения параметров скорости ветра; и
второй блок обработки, использующий второй алгоритм, использующий параметры скорости ветра, полученные с помощью первого алгоритма, и данные самолета, для выдачи, в случае необходимости, командных сигналов для приводов, по меньшей мере, одной плоскости управления летательного аппарата.
2. Система по п.1, в которой лидар является ультрафиолетовым лидаром.
3. Система по п.1, в которой лидар содержит приемопередающую оптическую часть и принимающую часть.
4. Система по п.3, в которой оптическая часть содержит лазер (30); затвор (32); систему (33) призмы и вращающихся зеркал; телескоп (34); окно (46), обработанное для выбранной частоты лазера; оптическое волокно (35).
5. Система по п.4, содержащая умножитель (31) частоты на выходе лазера (30).
6. Система по п.2, в которой принимающая часть содержит эталон Фабри-Перо (36), установленный между двумя оптическими линзами (37); фильтр (38); усилитель (39) яркости изображения; датчик (40) изображений и блок (41) обработки, использующий первый алгоритм.
| СПОСОБ ОБНАРУЖЕНИЯ ЗОН ТУРБУЛЕНТНОСТИ АТМОСФЕРЫ С ЛЕТАТЕЛЬНОГО АППАРАТА | 0 |
|
SU352244A1 |
| Комбинационный лидар | 1982 |
|
SU1088468A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВИДИМОСТИ И МИКРОСТРУКТУРЫ АТМОСФЕРНЫХ ОБРАЗОВАНИЙ | 1996 |
|
RU2110082C1 |
| Устройство для оптического зондирования | 1978 |
|
SU1065743A1 |
| US 4853861 A1, 01.08.1989. | |||

