Область техники, к которой относится изобретение
Изобретение относится к области измерительных приборов, и более конкретно к лазерному доплеровскому сканирующему лидару, предназначенному для дистанционного измерения поля скорости и направления ветра, а также опасных ветровых явлений перед летательным аппаратом. Изобретение может быть использовано для обеспечения безопасности полета летательного аппарата, на котором размещен лидар, в условиях нестационарности набегающего потока на ответственных этапах глиссады.
Уровень техники
Контроль скорости и направления ветра и своевременное обнаружение опасных ветровых явлений имеет очень важное значение для обеспечения безопасности полетов летательных аппаратов. Среди опасных ветровых явлений следует отметить, в частности, такое явление, как сдвиг ветра, что представляет собой повышенный градиент скорости, и/или направления ветра на относительно небольшом участке в атмосфере. Сильный сдвиг ветра (особенно при наличии нисходящего потока воздуха) может приводить к авариям и катастрофам/летательных аппаратов, в особенности на этапах взлета и посадки. Кроме того, в настоящее время существует потребность в своевременном, обнаружении зон турбулентности и прочих опасных метеорологических явлений, которые также могут создавать угрозу безопасности полетов. Кроме того, в условиях растущей интенсивности воздушного движения источником угрозы безопасности полетов могут стать вихревые (спутные) следы от объектов, находящихся в воздушном пространстве, в особенности от тяжелых летательных аппаратов.
Из уровня техники известен ряд систем дистанционного измерения параметров ветра, размещаемых на летательных аппаратах. В качестве примера, известна система, состоящая из источника света, модулятора, оптического сумматора и оптоэлектронной системы приема сигнала (см. патент США № US 8,908,160 В2, опубл. 09.12.2014).
Также известна лидарная доплеровская система мониторинга наличия в воздухе мелких частиц, таких как, например, кристаллы льда или вулканический пепел, состоящая из головного многофункционального блока и разветвленной сети сенсора доплеровского сдвига и наличия частиц в воздухе (см. патент США № US 8,724,099 B2, опубл. 13.05.2014).
Также известна система для измерения прогнозируемой турбулентности впереди летательного аппарата на основе лазера ультрафиолетового диапазона, состоящая из источника излучения, эталона фабри-перо, системы изображения, системы обработки данных (см. публикацию международной заявки № WO 2006016075 А1, опубл. 16.02.2006).
Общими недостатками перечисленных известных систем являются ограниченная применимость для диагностики различных ветровых явлений при установке на разных летательных аппаратах в силу использования источников различного оптического диапазона, а так же ограничения, сканирующих систем.
Ближайшим аналогом предлагаемого технического решения является мульти-лидарная система (см. заявку на патент США № US 2012/0092645 А1, опубл. 19.04.2012), которая содержит источник лазерного излучения и несколько оптически связанных с ним усилителей, каждый из которых подключен к своему отдельному телескопу и сканирующему узлу, и имеющий отдельный канал референсного излучения. Приемные модули каждого канала соединены с единым процессором обработки данных. Недостатком данной системы является наличие нескольких оптических систем, которые покрывают свои небольшие сектора сканирования, что требует большого количества оптики и дополнительных элементов, что значительно усложняет настройку системы и повышает ее стоимость.
Раскрытие изобретения
Задача настоящего изобретения состоит в создании бортового средства лазерного дистанционного измерения (лидара) для установки на летательных аппаратах, предназначенного для определения распределения скорости и направления движения воздушных масс и обнаружения опасных ветровых явлений.
Технический результат, достигаемый при использовании предлагаемого технического решения, состоит в повышении эффективности и точности измерения скорости и определения направления движения воздушных масс и обнаружения опасных ветровых явлений бортовым средством лазерного дистанционного измерения (лидаром). Кроме того, заявляемый лидар обеспечивает экипаж и системы управления полетом летательного аппарата, на котором он установлен, данными о ветровой обстановке перед летательным аппаратом в режиме реального времени, за счёт чего повышается эффективность систем автоматической корректировки параметров полета, безопасность полетов в условиях турбулентности набегающего потока и наличия сдвига ветра или вихревых (спутных) следов других объектов.
Для решения поставленной задачи предложен доплеровский сканирующий лидар бортового базирования, содержащий: полупроводниковый лазер с частотой v в диапазоне 1,5 микрона и с шириной линии излучения менее 100 кГц, имеющий волоконно-оптический выход с сохранением поляризации; делитель, имеющий один вход и два выхода, выполненный с возможностью направления части излучения в канал формирования опорного излучения с сохранением поляризации и направления другой части излучения по оптоволокну с сохранением поляризации на вход волоконно-оптического усилителя, волоконно-оптический усилитель с сохранением поляризации, выполненный с возможностью увеличения выходной мощности излучения до уровня, достаточного для работы акустооптического модулятора, акустооптический модулятор, обеспечивающий смещение по частоте (Fi) формируемого импульсного излучения, при частоте следования импульсов лазерного излучения не более 20 кГц, многокаскадный волоконно-оптический усилитель, выполненный с возможностью повышения средней мощности импульсного излучения, оптический циркулятор, выполненный с возможностью разделения приёмного и передающего трактов лидара и трансформации линейной поляризации излучения в круговую поляризацию излучения, приемо-передающий телескоп, выполненный с возможностью увеличения диаметра излучения и коллимации излучения, а также приёма излучения, рассеянного в атмосфере на естественном аэрозоле, который движется вместе с воздушными массами, и его направления в оптический циркулятор; сканирующий узел, выполненный с возможностью направления излучения, выходящего из приёмо-передающего телескопа, в атмосферу; волоконно-оптический сумматор с сохранением поляризации, имеющий два входа и два выхода, выполненный с возможностью сложения излучения, принятого из атмосферы посредством приёмо-передающего телескопа и поданного на вход через оптический циркулятор, с излучением локального осциллятора; балансный детектор, выполненный с возможностью детектирования разностной частоты лазерного излучения локального осциллятора и излучения, принятого из атмосферы и имеющего доплеровский сдвиг; и микропроцессор, выполненный с возможностью вычисления радиальной скорости и направления движения воздушных масс на основании упомянутой разностной частоты лазерного излучения локального осциллятора и излучения, принятого из атмосферы. При этом согласно изобретению сканирующий узел выполнен с возможностью обеспечения направления оптической оси выходного излучения лидара в заданном режиме, при этом сканирующий узел состоит из двух призм, отклоняющих оптическую ось выходного излучения лидара в зависимости от их положения относительно друг друга. Призмы выполнены в виде кремниевых клиновидных пластин, выполненных с возможностью вращения вокруг оси телескопа, проходящей через их центр. В варианте выполнения изобретения сканирующий узел может дополнительно содержать бесконтактные моментные двигатели постоянного тока с возбуждением от постоянных магнитов, выполненные с возможностью изменения положения призм сканирующего узла. В варианте выполнения изобретения оптический циркулятор может представлять собой оптический циркулятор на открытой оптике, содержащий пластину Брюстера и четвертьволновую пластину. В варианте выполнения полупроводниковый лазер служит в качестве локального осциллятора. В варианте выполнения оптический циркулятор выполнен с возможностью обратной трансформации круговой поляризации рассеянного излучения в линейную поляризацию, перпендикулярную относительно поляризации излучения, выходящего в атмосферу. Доплеровский сканирующий лидар согласно изобретению может дополнительно содержать аналого-цифровой преобразователь (ADC) для оцифровки выходного напряжения, содержащего переменную составляющую, характеризующую доплеровский сдвиг оптического излучения, рассеянного из атмосферы.
Краткое описание чертежей
Ниже приведено подробное описание заявляемого изобретения, проиллюстрированное чертежами. Чертежи выполнены не в масштабе. Пропорции и размеры отдельных элементов могут быть преувеличены для наглядности. Чертежи являются схематичными и упрощёнными. Необходимо отметить, что объём изобретения определяется исключительно прилагаемой формулой изобретения, в то время как нижеследующее подробное описание и чертежи служат лишь для иллюстрации изобретения и для обеспечения наилучшего понимания примерных вариантов его выполнения, но не для определения или ограничения его объёма. На чертежах показано:
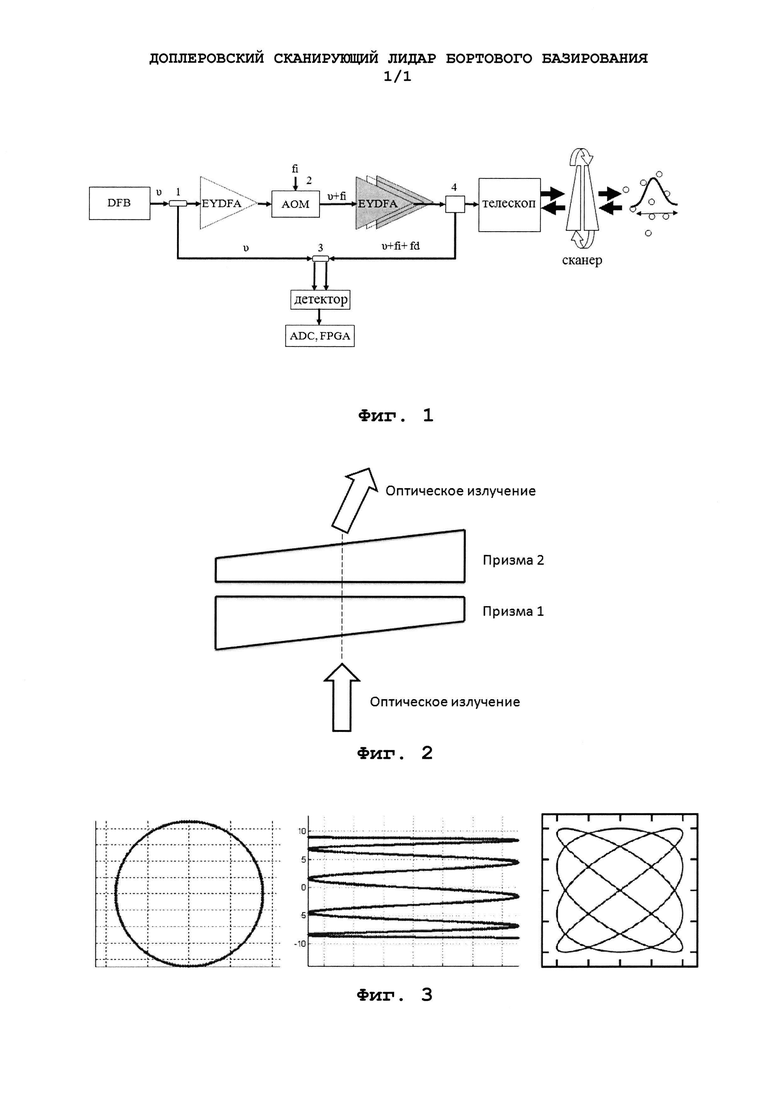
Фиг. 1 - принципиальная схема доплеровского сканирующего лидара бортового базирования согласно изобретению.
Фиг. 2 - упрощённая принципиальная схема сканирующего узла, используемого в доплеровском сканирующем лидаре бортового базирования согласно изобретению, с указанием изменения направления прохождения оптического излучения посредством призм сканирующего узла.
Фиг. 3 - примеры возможных траекторий изменения направления оптического излучения заявляемого доплеровского сканирующего лидара бортового базирования при сканировании лучом оптического излучения в пространстве.
Осуществление изобретения
В соответствии с изобретением предложен доплеровском сканирующем лидаре бортового базирования, предназначенный для определения распределения скорости и направления движения воздушных масс. Лидар (транслитерация англоязычной аббревиатуры, расшифровывающейся как “Light Detection And Ranging”, световое обнаружение и определение дальности) в общем случае представляет собой средство получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Под «доплеровским лидаром» в общем случае понимают систему, в которой испускаемый луч света рассеивается мелкодисперсными аэрозолями в атмосфере, а полученный рассеянный свет принимается доплеровским лидаром, и выполняется, например, измерение скорости ветра за счёт измерения частоты (длины волны) излучения, вызванного доплеровским эффектом.
Принципиальная схема доплеровского сканирующего лидара бортового базирования согласно изобретению представлена на Фиг. 1.
Заявляемый доплеровский сканирующий лидар бортового базирования обеспечивает измерение скорости и направления движения воздушных масс в приземном слое с борта летательного аппарата посредством измерения доплеровского сдвига импульсного лазерного излучения, обратно рассеянного на аэрозольных частицах, и позволяет строить трёхмерную картину распределения радиальной скорости и направления движения воздушных масс с помощью сканирующего узла, обеспечивающего изменение направления оси измерения сканирующего доплеровского лидара в заданном режиме, например по одной из траекторий, показанных на Фиг. 3. Следует отметить, что показанные на Фиг. 3 траектории сканирующего перемещения оси измерения доплеровского сканирующего лидара, соответствующие направлению оптического излучения лидара, являются лишь примерными, и возможны иные варианты траекторий.
Заявляемый доплеровский сканирующий лидар бортового базирования может быть размещен на подвижной летающей платформе, например на различных видах летательных аппаратов, таких как самолёт или вертолёт. Доплеровский сканирующий лидар бортового базирования в соответствии с изобретением содержит: полупроводниковый лазер (обозначенный как DFB на Фиг. 1); делитель (1); волоконно-оптический усилитель (обозначенный как EYDFA на Фиг. 1); акустооптический модулятор (обозначенный как AOM на Фиг. 1); многокаскадный волоконно-оптический усилитель (обозначенный как группа элементов EYDFA на Фиг. 1); оптический циркулятор (4); приемо-передающий телескоп; сканирующий узел; волоконно-оптический сумматор (3); балансный детектор (обозначенный как «детектор» на Фиг. 1); и микропроцессор (обозначенный как FPGA на Фиг. 1). Полупроводниковый лазер, который может представлять собой, в качестве примера, но не ограничения, полупроводниковый лазер с распределённой обратной связью (также называемый DFB-лазером) в соответствии с предпочтительным вариантом выполнения изобретения имеет частоту v в диапазоне 1,5 микрона и ширину линии излучения менее 100 кГц, и имеет волоконно-оптический выход с сохранением поляризации. Делитель (1) имеет один вход и два выхода и выполнен с возможностью направления части излучения в канал формирования опорного излучения с сохранением поляризации и направления другой части излучения по оптоволокну с сохранением поляризации на вход волоконно-оптический усилителя. Различные материально-технические средства, применимые в качестве делителя (1) в соответствии с настоящим изобретением, широко известны в данной области техники. Волоконно-оптический усилитель (EYDFA) с сохранением поляризации представляет собой, в качестве примера, но не ограничения, волоконно-оптический усилитель на оптическом волокне, легированном ионами эрбия и иттербия (также известный как EYDFA), выполненный с возможностью увеличения выходной мощности излучения до уровня, достаточного для работы акустооптического модулятора (AOM). Кроме того, по аналогичной схеме может быть выполнен многокаскадный волоконно-оптический усилитель, следующий за акустооптическим модулятором (AOM). Акустооптический модулятор (AOM) выполнен с возможностью обеспечения смещения по частоте (Fi) формируемого импульсного излучения, в варианте выполнения изобретения - при частоте следования импульсов лазерного излучения не более 20 кГц. Далее в оптической схеме доплеровского сканирующего лидара, представленной на Фиг. 1, следует многокаскадный волоконно-оптический усилитель (обозначенный как группа элементов EYDFA на Фиг. 1), который выполнен с возможностью повышения средней мощности импульсного излучения, поступающего из акустооптического модулятора (AOM). Оптический циркулятор (4) выполнен с возможностью разделения приёмного и передающего трактов лидара и трансформации линейной поляризации излучения в круговую поляризацию излучения. Приемо-передающий телескоп выполнен с возможностью увеличения диаметра излучения и коллимации излучения, а также приёма излучения, рассеянного в атмосфере на естественном аэрозоле, который движется вместе с воздушными массами, и его направления в циркулятор (4). Перестраиваемый приемо-передающий телескоп фокусирует выходное излучение лидара на заданном расстоянии, формируя в пространстве объем, в котором измеряется радиальная проекция скорости ветра. Сканирующий узел выполнен с возможностью направления оптического излучения лидара, выходящего из приёмо-передающего телескопа, в атмосферу. Волоконно-оптический сумматор (3) с сохранением поляризации имеет два входа и два выхода и выполнен с возможностью сложения излучения, принятого из атмосферы посредством приёмо-передающего телескопа и поданного на вход через циркулятор (4), с излучением локального осциллятора. Балансный детектор (обозначенный как «детектор» на Фиг. 1) выполнен с возможностью детектирования разностной частоты лазерного излучения локального осциллятора и излучения, принятого из атмосферы и имеющего доплеровский сдвиг. Микропроцессор выполнен с возможностью вычисления радиальной скорости и направления движения воздушных масс на основании упомянутой разностной частоты лазерного излучения локального осциллятора и излучения, принятого из атмосферы.
Одно из наиболее существенных отличий заявляемого изобретения от ближайшего аналога состоит в конструкции сканирующего узла (обозначенного как «сканер» на Фиг. 1), за счёт которой обеспечивается возможность сканирующего перемещения оптической оси выходного излучения лидара, что позволяет, в частности, строить трёхмерную картину распределения радиальной скорости и направления движения воздушных масс, которые измеряются доплеровским сканирующим лидаром согласно изобретению. Сканирующий узел выполнен с возможностью обеспечения направления оптической оси выходного излучения лидара в заданном режиме. Возможные виды режимов изменения направления оптической оси выходного излучения лидара проиллюстрированы на Фиг. 3, где в качестве неограничивающих примеров показаны круговое сканирование, сканирование с перемещением оптической оси выходного излучения влево и вправо по горизонтали и постепенным уменьшением или увеличением угла наклона оптической оси выходного излучения по вертикали с каждым горизонтальным проходом, и сложная траектория изменения направления оптической оси выходного излучения лидара, близкая по форме к накладывающимся друг на друга «восьмёркам» и другим фигурам, образованным окружностями или эллипсами. Для этого сканирующий узел состоит из двух кремниевых призм клиновидной формы (см. Фиг. 2), отклоняющих оптическую ось выходного излучения лидара в зависимости от их положения относительно друг друга, при этом призмы выполнены с возможностью вращения вокруг оси телескопа, проходящей через их центр.
В варианте выполнения заявляемого изобретения изменение положения призм сканирующего узла обеспечивается бесконтактными моментными двигателями постоянного тока с возбуждением от постоянных магнитов.
В варианте выполнения изобретения оптический циркулятор (4) представляет собой оптический циркулятор на открытой оптике, содержащий пластину Брюстера и четвертьволновую пластину. Оптическая система оптического циркулятора (4) в рассматриваемом примерном варианте выполнения заявляемого изобретения относится к так называемым системам открытого типа (англ. open path), в которых входное, выходное и ответвленное оптическое излучение распространяется по оптическим путям в воздухе, а не по оптическому волокну.
Принцип работы доплеровского сканирующего лидара бортового базирования согласно изобретению состоит в следующем. Непрерывное излучение полупроводникового лазера, который служит в качестве локального осциллятора и может представлять собой, в качестве примера, но не ограничения, полупроводниковый лазер с распределённой обратной связью (также называемый DFB-лазером и обозначенный соответствующим образом на Фиг. 1) с частотой v в диапазоне 1,5 микрона и с шириной линии излучения менее 100 кГц по оптоволокну с сохранением поляризации поступает на делитель (1), имеющий один вход и два выхода, посредством которого часть излучения направляется в канал формирования опорного излучения, остальная часть по оптоволокну с сохранением поляризации поступает на вход волоконно-оптический усилителя (EYDFA) с сохранением поляризации, который увеличивает выходную мощность до уровня, достаточного для работы акустооптического модулятора AOM), обеспечивающего смещение по частоте (Fi) формируемого импульсного излучения, при частоте следования импульсов не более 20 кГц. Частота смещения находится в пределах до нескольких сотен мегагерц. Сформированное импульсное излучение с частотой v+Fi по оптоволокну поступает в многокаскадный волоконно-оптический усилитель, повышающий среднюю мощность импульсного излучения.
Усиленное излучение проходит через циркулятор (4) на открытой оптике, состоящий из пластины Брюстера и четвертьволновой пластины, который по существу представляет собой разделитель приемного и передающего тракта и трансформирует линейную поляризацию в круговую. Далее излучение направляется в приемо-передающий телескоп, который увеличивает диаметр излучения и коллимирует излучение, и далее оптическое излучение лидара направляется в атмосферу посредством сканирующего узла, состоящего из двух кремниевых призм, как описано выше.
Направление распространения излучения определяется положением двух призм сканирующего узла и может изменяться в соответствии с выбранным режимом сканирования. Сканирующий узел (обозначенный как «сканер» на Фиг. 1), содержащий две кремниевых клиновидных призмы, положение которых может изменяться, например, посредством бесконтактных моментных двигателей постоянного тока с возбуждением от постоянных магнитов, обеспечивает возможность направления оптической оси выходного излучения в пределах конуса с полным углом раствора 40 градусов. Закон перемещения луча зависит от соотношения угловых скоростей вращения и начальной фазы каждой из двух клиновидных призм сканирующего узла.
Излучение рассеивается на естественном аэрозоле, который движется вместе с воздушными массами. При отражении излучения лазера от частиц аэрозоля, увлекаемых ветровым потоком, наблюдается доплеровский сдвиг частоты колебаний световой волны. Вследствие эффекта Доплера излучение приобретает соответствующий частотный сдвиг, который однозначно связан со скоростью и направлением воздушного потока относительно линии распространения излучения. Рассеянное на аэрозоле излучение собирается приёмо-передающим телескопом и поступает на оптический циркулятор (4), который обратно трансформирует круговую поляризацию рассеянного излучения в линейную поляризацию, перпендикулярную относительно поляризации излучения, выходящего в атмосферу, и направляет его на волоконно-оптический сумматор (3), имеющий два входа и два выхода. Этот сумматор складывает излучение из атмосферы с излучением локального осциллятора.
Суммарное излучение по двум волоконно-оптическим выходам из делителя (3) поступает на балансный детектор, обеспечивающий возможность детектирования разностной частоты оптического излучения локального осциллятора и оптического излучения, рассеянного из атмосферы и имеющего доплеровский сдвиг, характеризуемый выходным напряжением, содержащим переменную составляющую на частотах до сотен мегагерц. Это напряжение оцифровывается аналого-цифровым преобразователем (обозначен как ADC на Фиг. 1) с частотой, которая выбирается из условия теоремы Котельникова, и с битностью, соответствующей выходным характеристикам приемника. Оцифрованный сигнал подвергается быстрому преобразованию Фурье, реализованному на микропроцессорной плате, которая, в качестве примера, но не ограничения, может быть выполнена в виде программируемой логической интегральной схемы (также называемой FPGA и соответствующим образом обозначенной на Фиг. 1). Результатом вычисления является спектр Фурье, содержащий доплеровский сигнал, который позволяет вычислить радиальную скорость и направление движения воздушных масс, в частности, посредством микропроцессора. Кроме скорости и направления, данные ширины доплеровского пика в спектре несут информацию о нестационарности потока в объеме измерения за время накопления данных.
Заявляемое изобретение, описанное выше, реализуется посредством оптической системы, проиллюстрированной на Фиг. 1, посредством которой выполняются измерения с использованием оптического излучения, формируемого доплеровским сканирующим лидаром, рассеиваемого на естественном аэрозоле в атмосфере, который движется вместе с воздушными массами, и собираемого обратно упомянутой оптической системой лидара, а также посредством обработки данных, получаемых в результате упомянутого измерения, с получением итогового результата, указывающего на значение скорости и направления движения воздушных масс в приземном слое. Для этого данные, получаемые в результате упомянутого измерения, оцифровываются аналого-цифровым преобразователем (ADC), и после этого обрабатываются микропроцессором, который, как указано выше, может быть выполнен, в качестве неограничивающего примера, в виде программируемой логической интегральной схемы (FPGA). Однако специалисту в данной области техники будет понятно, что помимо указанных выше примеров возможны и другие варианты реализации микропроцессора, при этом для обработки данных могут использоваться различные известные интегральные схемы, компьютеры общего назначения, специализированные компьютеры, один или более процессоров и т.п., под управлением программного обеспечения, которое может быть реализовано в виде набора команд или машинного кода на различных языках программирования, широко известных специалистам в данной области техники, и которое сохранено на одном или более машиночитаемых носителях, которые также широко известны специалистам в данной области техники. Кроме того, определённые функции обработки данных, описанные выше, могут выполняться микропрограммным обеспечением или специализированным аппаратным обеспечением.
При том, что выше описаны примерные варианты выполнения заявляемого изобретения, специалистам в данной области техники очевидно, что возможны различные изменения, не выходящие за рамки сущности и объёма предложенного технического решения. Перечисленные выше материалы, из которых выполнены компоненты оптической системы заявляемого доплеровского сканирующего лидара, а также конкретные параметры и режимы работы описанных выше элементов, являются примерными, и специалистам в данной области техники будет очевидна возможность использования других материалов с аналогичными свойствами и/или режимов, не выходящая за рамки объёма настоящего изобретения. Все такие возможные изменения наряду с полным объёмом эквивалентов вышеуказанных признаков считаются входящими в объём заявляемого изобретения, который определяется нижеприведённой формулой изобретения и не ограничен конкретными примерами, описанными выше и показанными на прилагаемых чертежах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАССЕИВАЮЩЕГО ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОГО ОБЪЕКТА И ДОПЛЕРОВСКИЙ НИЗКОКОГЕРЕНТНЫЙ ЛИДАР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365942C1 |
| ЛИДАРНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2744932C1 |
| КОГЕРЕНТНАЯ ЛИДАРНАЯ СИСТЕМА НА ОСНОВЕ ПОЛУПРОВОДНИКОВОГО ЛАЗЕРА И УСИЛИТЕЛЯ | 2008 |
|
RU2484500C2 |
| Способ и лидарная система для оперативного обнаружения турбулентности в ясном небе с борта воздушного судна | 2023 |
|
RU2798694C1 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| Сканирующее устройство излучения и приёма отражённого лазерного пучка для космических применений | 2024 |
|
RU2832696C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА И НЕКОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛИДАР | 2013 |
|
RU2545498C1 |
| СИСТЕМА РАННЕГО ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТИ ПЕРЕД ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2373554C2 |
| Комбинированный лидар | 2020 |
|
RU2738588C1 |
| ЛИДАР ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ АТМОСФЕРЫ (ВАРИАНТЫ) | 2006 |
|
RU2335786C1 |
Использование: для дистанционного измерения поля скорости и направления ветра. Сущность изобретения заключается в том, что доплеровский сканирующий лидар бортового базирования содержит: полупроводниковый лазер; делитель; волоконно-оптический усилитель; акустооптический модулятор; многокаскадный волоконно-оптический усилитель; оптический циркулятор; приемо-передающий телескоп; сканирующий узел; волоконно-оптический сумматор; балансный детектор и микропроцессор. Сканирующий узел выполнен с возможностью обеспечения направления оптической оси выходного излучения лидара в заданном режиме, при этом сканирующий узел состоит из двух призм, отклоняющих оптическую ось выходного излучения лидара в зависимости от их положения относительно друг друга, при этом призмы выполнены в виде кремниевых клиновидных пластин, выполненных с возможностью вращения вокруг оси телескопа, проходящей через их центр. Технический результат: повышение эффективности и точности измерения скорости и определения направления движения воздушных масс и обнаружения опасных ветровых явлений. 5 з.п. ф-лы, 3 ил.
1. Доплеровский сканирующий лидар бортового базирования, содержащий:
полупроводниковый лазер (DFB) с частотой v в диапазоне 1,5 микрона и с шириной линии излучения менее 100 кГц, имеющий волоконно-оптический выход с сохранением поляризации;
делитель (1), имеющий один вход и два выхода, выполненный с возможностью направления части излучения в канал формирования опорного излучения с сохранением поляризации и направления другой части излучения по оптоволокну с сохранением поляризации на вход волоконно-оптического усилителя (EYDFA),
волоконно-оптический усилитель (EYDFA) с сохранением поляризации, выполненный с возможностью увеличения выходной мощности излучения до уровня, достаточного для работы акустооптического модулятора (AOM),
акустооптический модулятор (AOM), обеспечивающий смещение по частоте (Fi) формируемого импульсного излучения, при частоте следования импульсов лазерного излучения не более 20 кГц,
многокаскадный волоконно-оптический усилитель, выполненный с возможностью повышения средней мощности импульсного излучения,
оптический циркулятор (4), выполненный с возможностью разделения приёмного и передающего трактов лидара и трансформации линейной поляризации излучения в круговую поляризацию излучения,
приемо-передающий телескоп, выполненный с возможностью увеличения диаметра излучения и коллимации излучения, а также приёма излучения, рассеянного в атмосфере на естественном аэрозоле, который движется вместе с воздушными массами, и его направления в циркулятор (4),
сканирующий узел, выполненный с возможностью направления излучения, выходящего из приёмо-передающего телескопа, в атмосферу,
волоконно-оптический сумматор (3) с сохранением поляризации, имеющий два входа и два выхода, выполненный с возможностью сложения излучения, принятого из атмосферы посредством приёмо-передающего телескопа и поданного на вход через циркулятор (4), с излучением локального осциллятора,
балансный детектор, выполненный с возможностью детектирования разностной частоты лазерного излучения локального осциллятора и излучения, принятого из атмосферы и имеющего доплеровский сдвиг, и
микропроцессор, выполненный с возможностью вычисления радиальной скорости и направления движения воздушных масс на основании упомянутой разностной частоты лазерного излучения локального осциллятора и излучения, принятого из атмосферы;
отличающийся тем, что
сканирующий узел выполнен с возможностью обеспечения направления оптической оси выходного излучения лидара в заданном режиме, при этом сканирующий узел состоит из двух призм, отклоняющих оптическую ось выходного излучения лидара в зависимости от их положения относительно друг друга, при этом призмы выполнены в виде кремниевых клиновидных пластин, выполненных с возможностью вращения вокруг оси телескопа, проходящей через их центр.
2. Доплеровский сканирующий лидар по п.1, отличающийся тем, что сканирующий узел дополнительно содержит бесконтактные моментные двигатели постоянного тока с возбуждением от постоянных магнитов, выполненные с возможностью изменения положения призм сканирующего узла.
3. Доплеровский сканирующий лидар по п.1, отличающийся тем, что оптический циркулятор (4) представляет собой оптический циркулятор на открытой оптике, содержащий пластину Брюстера и четвертьволновую пластину.
4. Доплеровский сканирующий лидар по п.1, отличающийся тем, что полупроводниковый лазер (DFB) служит в качестве локального осциллятора.
5. Доплеровский сканирующий лидар по п.1, отличающийся тем, что оптический циркулятор выполнен с возможностью обратной трансформации круговой поляризации рассеянного излучения в линейную поляризацию, перпендикулярную относительно поляризации излучения, выходящего в атмосферу.
6. Доплеровский сканирующий лидар по п.1, дополнительно содержащий аналого-цифровой преобразователь (ADC) для оцифровки выходного напряжения, содержащего переменную составляющую, характеризующую доплеровский сдвиг оптического излучения, рассеянного из атмосферы.
| US 20120092645 A1, 19.04.2012 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА И НЕКОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛИДАР | 2013 |
|
RU2545498C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТИ ВОЗДУХА ВОКРУГ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2365523C2 |
| СИСТЕМА РАННЕГО ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТИ ПЕРЕД ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2373554C2 |
| US 20030009268 A1, 09.01.2003 | |||
| US 6184981 B1, 06.02.2001. | |||

