Изобретение относится к системам поиска и обнаружения мин, находящихся на земной поверхности или под ней, и может быть использовано в переносном варианте или на подвижной платформе.
Известно устройство аналогичного назначения - миноискатель ИМП-2 (http://www.arms-expo.ru/site.xp/049054049048124054056049.html), состоящее из поискового элемента, сборной трехколенной штанги, усилительного блока и головных телефонов. Миноискатель позволяет обнаруживать мины с металлическими корпусами и деталями, находящиеся на поверхности и в толще грунта (снега, под водой) при проведении работ по преодолению минно-взрывных заграждений и разминировании местности.
Недостатками указанного устройства являются невозможность обнаружения мин, не имеющих металлических деталей, и близость зоны поиска к оператору устройства, что повышает риск поражения при возможном срабатывании взрывного устройства.
Наиболее близким аналогом (прототипом) настоящего изобретения является устройство обнаружения мин, имеющее металлодетектор и радар для обнаружения взрывчатых веществ, не имеющих металлических частей (US 5680048, 21.10.1997), состоящее из мультисенсорного модуля, находящегося на нижнем конце телескопического щупа, который верхним концом соединен с концом опорной планки. Планка ремнем соединена с поддерживающей рамкой и на другом конце имеет блок радара с компонентами электронных схем, перемещающийся по планке. К планке также прикреплена рукоятка для управления телескопическим щупом и блок управления. Оператор имеет защитный шлем со встроенными наушниками и защитные очки с дисплеем, на который выводится информация от радара. За спиной оператора находится ранец с блоком питания, компьютером и соединительными проводами. Устройство позволяет производить поиск и обнаружение металлических и взрывоопасных объектов. Оператор, управляя телескопическим щупом с помощью рукоятки и перемещаемого для равновесия планки блоком радара, осуществляет перемещение мультисенсорного модуля у поверхности земли. Мультисенсорный модуль имеет металлодетектор и радарную систему для обнаружения взрывных устройств. При обнаружении объекта мультисенсорный модуль выдает сигнал в компьютер, а оттуда выдается сигнал оператору на наушники и дисплей.
Недостатком этого устройства является близость зоны поиска к оператору устройства, что повышает риск поражения при возможном срабатывании взрывного устройства. Другим недостатком устройства является большой вес мультисенсорного модуля с телескопическим щупом, который вызывает быструю утомляемость оператора устройства и сокращение времени непрерывного поиска.
Задачей заявляемого изобретения является повышение безопасности оператора системы разминирования и уменьшение физической нагрузки на оператора.
Поставленная задача решена благодаря тому, что система для обнаружения мин, содержащая мультисенсорный модуль, установленный на конце телескопического щупа, опорную планку, на которой закреплен телескопический щуп, и поддерживающую рамку, соединенную с опорной планкой с помощью ремня и предназначенную для ношения устройства на плече оператора, блок управления и блок радара, прикрепленные к опорной планке, а также расположенные в ранце блок питания и компьютер, который соединен как с мультисенсорным модулем и радаром, так и с дисплеем в защитных очках оператора и с наушниками в его шлеме, в соответствии с изобретением - снабжена подъемным устройством, связанным с корпусом мультисенсорного модуля и выполненным в виде двух соосно установленных воздушных винтов, вращающихся в разные стороны, с автоматом перекоса каждый, а в блок управления включен пульт управления подъемным устройством.
Мультисенсорный модуль содержит измерители, работающие на разных физических принципах. Снизу к нему прикреплена видеокамера, а сверху подъемное устройство. Подъемное устройство представляет собой беспилотный летательный аппарат вертолетного типа, состоящий из движителя, двух соосно расположенных винтов с автоматами перекоса и защитной сетки. Управление подъемным устройством осуществляет оператор системы с помощью пульта управления, выполненном на блоке управления. Информация от видеокамеры и мультисенсорного блока поступает оператору системы на дисплей в защитных очках и наушники в защитном шлеме после обработки в компьютере, находящемся в ранце.
Изобретение позволяет значительно увеличить длину телескопического щупа за счет создания подъемным устройством аэродинамической подъемной силы, приложенной к противоположному от оператора концу телескопического щупа. Аэродинамическая сила уравновешивает вес конструкции мультисенсорный модуль - телескопическая штанга, что приводит к уменьшению физической нагрузки на оператора системы. Таким образом, мультисенсорный модуль на телескопическом щупе может находиться на значительном расстоянии от оператора системы, что обеспечивает безопасность оператора системы разминирования.
Изобретение поясняется фигурами, на которых изображено:
Фиг.1 - система для поиска и обнаружения мин.
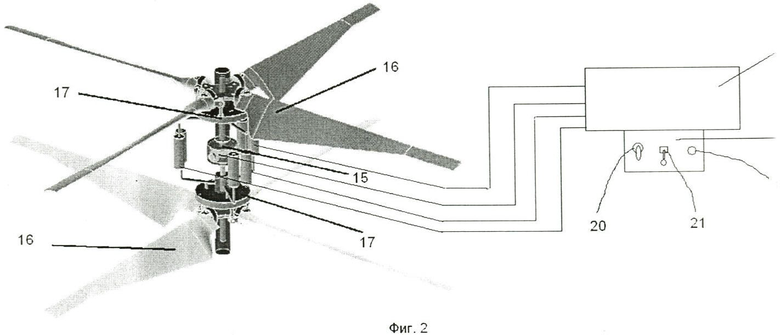
Фиг.2 - подъемное устройство с пультом управления.
На рисунке (фиг.1) показана система для поиска и обнаружения мин оператором А на местности Б. Система состоит из мультисенсорного модуля 1, на котором могут быть размещены различные измерители и датчики, позволяющие обнаруживать взрывные устройства, например металлодетекторы, радарные устройства, химические анализаторы. К блоку мультисенсорного модуля 1 сверху прикреплено подъемное устройство 2, а снизу видеокамера 3. Мультисенсорный блок 1 шарнирно соединен с телескопическим щупом 4, а другим концом телескопический щуп 4 шарнирно соединен с планкой 5. К телескопическому щупу 4 со стороны оператора подсоединена рукоятка 6. На планке 5 располагается блок радара 7 и блок управления 8, которые соединены многожильным кабелем (на фиг.1 не показаны) с сенсорами мультисенсорного блока 1, видеокамерой 3, подъемным устройством 2. Планка 5 жестко соединена с поддерживающей рамкой 9, которая в свою очередь соединена с планкой 5 при помощи ремня 10. Планка 5, поддерживающая рамка 9 и ремень 10 служат для ношения системы оператором А. Оператор А имеет защитный шлем 11 со встроенными наушниками (на фиг.1 не показаны), защитные очки 12 с дисплеем (на фиг.1 не показан), ранец 13 с блоком питания, компьютером, соединительными проводами (на фиг.1 не показаны). Ранец 13 соединен многожильным кабелем с защитным шлемом 11, блоком управления 8, блоком радара 7 и дисплеем в защитных очках 12. В блоке управления 8 находится пульт управления 14 подъемным устройством 2, с которого подаются сигналы управления на подъемное устройство 2.
На рисунке (Фиг.2) изображено подъемное устройство 2, выполненное в виде беспилотного летательного аппарата, состоящего из движителя 15, двух соосно расположенных винтов 16, вращающихся в разные стороны для компенсации моментов на оси вращения, автоматы перекоса 17, для управления направлением действия аэродинамической силы, созданной лопастями винтов 16. Подъемное устройство 2 закрыто защитной сеткой 18 (фиг.1) для предотвращения поломки лопастей винтов 16 при столкновении с предметами на местности (высокая трава, ветки деревьев). Подъемное устройство 2 управляется по трем координатам с помощью пульта управления 14, находящегося в блоке управления 8 (Фиг.1, 2). На пульте управления 14 имеются: кнопка 19 со световой индикацией, предназначенная для включения (отключения) движителя 15, кнюппель 20, с помощью которого осуществляется управление подъемным устройством 2 в горизонтальной плоскости, и рычаг 21, с помощью которого осуществляется управление подъемным устройством 2 в вертикальной плоскости.
В походном положении телескопический щуп 4 складывается и присоединяется, вместе с мультисенсорным модулем 1, подъемным устройством 2 и видеокамерой 3, к планке 5 за спиной оператора А системы. В рабочем положении телескопический щуп 4 выдвигается на необходимое расстояние и поддерживается над местностью Б с помощью подъемного устройства 2.
При осуществлении поиска мин на определенной местности, оператор системы для поиска и обнаружения мин переводит систему из походного положения в рабочее, путем выдвижения телескопического щупа 4 и включения подъемного устройства с помощью кнопки на пульте управления. Движитель подъемного устройства 2 начинает работать и приводит во вращение винты подъемного устройства, которые создают аэродинамическую подъемную силу и подъемное устройство поднимает мультисенсорный модуль 1 с прикрепленной к нему видеокамерой на выбранную оператором высоту, при которой создаваемая аэродинамическая сила уравновесит вес поднимаемой полезной нагрузки и вес прикрепленного к ней телескопического щупа 4. Вращение винтов осуществляется с постоянной скоростью и длина телескопического щупа не меняется. Поэтому высота мультисенсорного блока будет зависеть от общего шага винта, создаваемого автоматом перекоса. Изменение общего шага винта изменяет создаваемую винтом аэродинамическую силу. Оператор системы с помощью рычага на пульте управляет общим шагом винтов 16 через соответствующие автоматы прекоса и устанавливает необходимую для поиска мин высоту мультисенсорного модуля 1 над земной поверхностью. В рабочем положении системы оператор, находясь на расстоянии длины телескопического щупа от мультисенсорного модуля, наблюдает за исследуемой земной поверхностью под мультисенсорным модулем с помощью дисплея на защитных очках 12 шлема 11. Информация на дисплей поступает от видеокамеры 3 на мультисенсорном блоке через соединительные провода и ранцевый компьютер 13. При нахождении под мультисенсорным модулем мины или другого взрывного устройства из мультисенсорного блока 1, через блок радара и ранцевый компьютер 13, выдается сигнал оператору системы на наушники в защитном шлеме 11 и дисплей в защитных очках 12. Блок управления 8 и блок радара 7 служат для обеспечения работы элементов мультисенсорного модуля 1, подъемного устройства 2 и видеокамеры 3. Для перемещения мультисенсорного модуля 1 в другую точку над земной поверхностью оператор системы может воспользоваться кнюппелем 20. Сигналы от кнюппеля 20 с пульта управления 14 через блок управления 8 поступает па автоматы перекоса 17 подъемного устройства 2 и меняют шаг винтов 16, так что у подъемной силы винтов возникает горизонтальная составляющая, которая перемещает подъемное устройство 2 в горизонтальной плоскости.
Применение системы для поиска и обнаружения мин позволяет повысить безопасность оператора в случае срабатывании взрывного устройства и уменьшить физическую нагрузку оператора в процессе поиска.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регистратор для экстремальных видов спорта | 2016 |
|
RU2646197C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| ТРЕНАЖЕР СПАСАТЕЛЬНОГО ВЕРТОЛЕТА | 2017 |
|
RU2662302C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА | 2019 |
|
RU2712355C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| Инженерная машина для обнаружения взрывоопасных устройств | 2022 |
|
RU2785287C1 |
Изобретение относится к средствам обнаружения скрытых объектов, а именно к устройствам для обнаружения мин и взрывчатых веществ. Сущность: система состоит из мультисенсорного модуля (1), телескопического щупа (4), аэродинамического подъемного устройства (2), видеокамеры (3), блока радара (7), блока управления (8) и заплечного ранца (13) с блоком питания и компьютером. Ранец (13) связан многожильным кабелем с защитным шлемом (11), блоком управления (8), блоком радара (7) и с дисплеем, установленным в защитных очках (12). Мультисенсорный модуль может содержать измерители, работающие на разных физических принципах. Подъемное устройство (2) представляет собой беспилотный летательный аппарат вертолетного типа, состоящий из движителя (15), двух соосно расположенных винтов (16) с автоматами перекоса (17), защитной сетки (18). Управление подъемным устройством осуществляет оператор (А) системы с помощью пульта управления (14) на блоке управления (8). Информация от видеокамеры (3) и мультисенсорного блока (1) поступает оператору (А) системы на дисплей в защитных очках (12) и наушники в защитном шлеме (11) после обработки в компьютере, находящемся в ранце (13). Система повышает безопасность работы оператора и уменьшает его физическую нагрузку в процессе поиска. 2 ил.
Система для обнаружения мин, содержащая мультисенсорный модуль, установленный на конце телескопического щупа, опорную планку, на которой закреплен телескопический щуп, и поддерживающую рамку, соединенную с опорной планкой с помощью ремня и предназначенную для ношения устройства на плече оператора, блок управления и блок радара, прикрепленные к опорной планке, а также расположенные в ранце блок питания и компьютер, который соединен как с мультисенсорным модулем и радаром, так и с дисплеем в защитных очках оператора и с наушниками в его шлеме, отличающаяся тем, что она снабжена подъемным устройством, связанным с корпусом мультисенсорного модуля и выполненным в виде двух соосно установленных воздушных винтов, вращающихся в разные стороны, с автоматом перекоса каждый, а в блок управления включен пульт управления подъемным устройством.
| US 5680048 А, 21.10.1997 | |||
| СПОСОБ ПОИСКА МИН СВЕРХШИРОКОПОЛОСНЫМ ГЕОРАДАРОМ | 2004 |
|
RU2248018C1 |
| US 2009288550 A1, 26.11.2009 | |||
| US 5307272 A, 26.04.1994. | |||

