Изобретение относится к парашютной технике, а именно к конструкции тренажеров для парашютистов. Тренажер парашютиста предназначен для практических тренировок и отработки элементов прыжка с парашютом.
Известен тренажер-симулятор парашютного прыжка, который содержит силовой каркас с системой крепления к ней ранца с подвесной системой, две стропы управления с системой датчиков, регистрирующих величины втягивания строп управления обучаемым, очки виртуальной реальности для моделирования в них системы визуализации внешней обстановки, комплект кабелей, осуществляющих передачу входных и выходных сигналов между исполнительными механизмами и управляющим компьютером, а также управляющим компьютером, позволяющий, в зависимости от выбранной программы инструктором, управлять работой визуального ряда, проецируемого в очках виртуальной реальности, регистрировать параметры управляемого полета парашютиста, анализировать результаты деятельности парашютиста для выставления автоматизированной оценки. (Патент США, US №6000942 А, 1999 г.)
Недостатком указанного тренажера является то, что в нем конструктивно не предусмотрено должное воспроизведение динамических нагрузок при моделируемых сценариях парашютных прыжков, наличие которых при реальном прыжке непосредственно воздействует на ощущения обучаемого и способствует выполнению им неправильных действий при управлении парашютной системой.
Наиболее близким решением является тренажер парашютиста-десантника, который состоит из управляющего компьютера, рабочего места инструктора, ранца с подвесной системой, строп управления, очков виртуальной реальности и устройства регистрации положения рук, выполненного в виде перчаток, а также включает в себя металлоконструкцию с электроприводами для динамического воспроизведения и сопровождения полета. (Патент РФ №2653900 МПК B64D 23/00, 2018 г.)
Недостатком указанного тренажера является то, что в нем конструктивно заложены тросовые механизмы подъема (опускания), моделирующие нагрузки ограниченного значения, кроме того, в указанном тренажере конструктивно не предусмотрено устройство, имитирующее процесс приземления, что способствует развитию неправильных навыков при приземлении и может привести к нештатным ситуациям.
Техническая задача направлена на повышение качества подготовки парашютистов к совершению прыжков с парашютом за счет применения подвижной рамы с гидравлическим приводом, вращающейся платформы с шаговым двигателем и имитатора приземления.
Техническая задача достигается тем, что в тренажер парашютиста, содержащий управляющий компьютер, подвесную систему, левую и правую стропы управления, шлем со встроенными очками виртуальной реальности и наушниками, систему датчиков и кабелей, две стойки, электропривод, подвижную раму дополнительно введены верхняя подвижная рама, выполненная с возможностью вертикального перемещения и установленная на верхних концах стоек, жестко закрепленных на основании, причем стойки выполнены в виде телескопических труб, подвижные части которых соединены ограничителем, в верхней части подвижной рамы выполнена платформа, к которой прикреплены свободные концы подвесной системы. Левая и правая стропы управления, причем платформа связана по средствам зубчатой передачи с электроприводом. Представляющим собой шаговый двигатель, в основании установлен имитатор приземления, состоящий из нижней плиты, верхней крышки со встроенным сердечником и соленоида, подключенного к управляющему компьютеру, к которому подключены также шаговый двигатель, гидроцилиндр, стропы управления и шлем.
Технический результат состоит в более качественной подготовке парашютиста, создавая более реалистичное динамическое сопровождение при выполнении этапов прыжка, особенно момента приземления, за счет применения подвижной рамы с гидравлическим приводом, вращающейся платформы с шаговым двигателем и имитатора приземления.
Сущность изобретения поясняется чертежами.
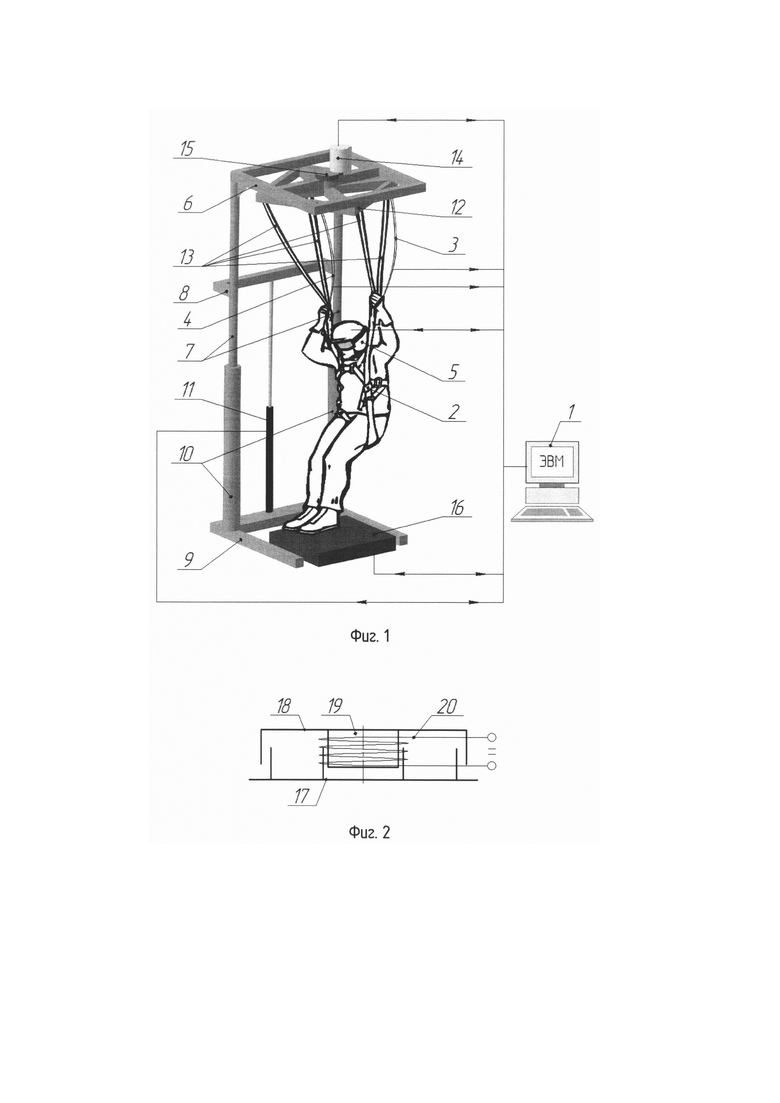
На фиг. 1 представлен общий вид тренажера парашютиста; на фиг. 2 - принципиальная схема имитатора приземления.
Тренажер парашютиста (фиг. 1) содержит управляющий компьютер 1, подвесную систему 2, левую 3 и правую 4 стропы управления, шлем 5 со встроенными очками виртуальной реальности и наушниками, систему датчиков и кабелей (в графической части не показаны), верхнюю подвижную раму 6, включающую в себя две стойки 7 и ограничитель 8, имеющую возможность перемещения относительно основания 9, включающего в себя две неподвижные стойки 10, за счет гидроцилиндра 11. В верхней части подвижной рамы 6 установлена вращающаяся платформа 12, к которой прикреплены свободные концы 13 подвесной системы 2, при этом вращение платформы 12 осуществляется шаговым двигателем 14 при помощи зубчатой передачи 15, кроме того, в нижней части основания 9 установлен имитатор 16 приземления. Левая 3 и правая 4 стропы управления, шлем 5, гидроцилиндр 11, шаговый двигатель 14 и имитатор 16 приземления подключены к управляющему компьютеру 1.
Имитатор 16 приземления (фиг. 2) состоит из нижней плиты 17, верхней крышки 18 со встроенным сердечником 19, соленоида 20, подключенного к управляющему компьютеру 1.
Управляющий компьютер 1 включает монитор тренера (инструктора) (в графической части не показан), промежуточные механизмы (в графической части не показаны) и предназначен для обеспечения работы тренажера, за счет программно-аппаратного комплекса.
Подвесная система 2 представляет собой штатную подвесную систему парашюта и предназначена для размещения парашютиста при отработке учебных задач. Левая 3 и правая 4 стропы управления представляют собой штатные стропы управления парашютной системы и предназначены для передачи управляющих сигналов от парашютиста на промежуточные механизмы (в графической части не указаны) для последующей обработки программно-аппаратным комплексом компьютера 1. Шлем 5 со встроенными очками виртуальной реальности и наушниками представляет собой известное из уровня техники серийно выпускаемое устройство и предназначен для создания видео-аудио сопровождения во время обучения. За счет имеющейся в составе очков виртуальной реальности системы датчиков, определяющих положение головы и направление взгляда парашютиста, получают информацию для последующей обработки программно-аппаратным комплексом управляющего компьютера 1 с получением автоматической оценки действий обучаемого.
Верхняя подвижная рама 6, две стойки 7 и ограничитель 8 жестко соединены друг с другом и представляют собой металлоконструкцию. Две неподвижные стойки 10 жестко прикреплены к основанию 9. При этом две стойки 7 имеют возможность свободно перемещаться внутри двух неподвижных стоек 10, и представляют собой телескопические трубы. Верхняя подвижная рама 6, две стойки 7, ограничитель 8, основание 9 и две неподвижные стойки 10 образуют рабочее пространство парашютиста.
Основание 9 жестко установлено на поверхности пола. Перемещение подвижной рамы 6 относительно основания 9 отслеживается датчиками (в графической части не показаны), их сигнал принимается программно-аппаратным комплексом управляющего компьютера 1. Перемещение верхней подвижной рамы 6 относительно основания 9 обеспечивает гидроцилиндр 11. Корпус гидроцилиндра 11 жестко закреплен в основании 9, а шток гидроцилиндра 11 шарнирно закреплен на ограничителе 8 верхней подвижной рамы 6. Управление гидроцилиндром 11 производится программно-аппаратным комплексом управляющего компьютера 1.
Вращающаяся платформа 12 представляет собой металлоконструкцию, шарнирно закрепленную на верхней стороне подвижной рамы 6. Шарнирное соединение осуществляется за счет вала (в графической части не указан), один конец которого жестко закреплен во вращающейся платформе, средняя часть вала имеет возможность вращения относительно верхней подвижной рамы 6, а на другом конце вала жестко установлено ведомое колесо зубчатой передачи 15. Свободные концы 13 представляют собой штатные свободные концы подвесной системы 2. При помощи свободных концов 13 подвесная система 2 крепится на вращающейся платформе 12. Движение вращающейся платформе 12 задает высокомоментный шаговый двигатель 14 при помощи эвольвентной зубчатой передачи 15, представляющей собой два металлических зубчатых колеса. Ведущее зубчатое колесо передачи жестко устанавливается на валу шагового двигателя 14. Шаговый двигатель 14 закреплен на верхней стороне подвижной рамы 6. Управление шаговым двигателем 14 производится управляющим компьютером 1 по результатам анализа полученных программно-аппаратным комплексом сигналов от левой 3 и правой 4 строп управления.
Имитатор 16 приземления установлен жестко на поверхности пола внутри основания 9. Имитатор 16 приземления представляет собой металлическую конструкцию коробчатого сечения и состоит из нижней плиты 17 и крышки 18 со встроенным сердечником 19, между которыми установлен соленоид 20. Управление имитатором 16 приземления производится при помощи напряжения, подаваемого на соленоид 20 управляющим компьютером 1 по результатам анализа сигналов, полученных программно-аппаратным комплексом.
Работа тренажера парашютиста осуществляется следующим образом.
Обучаемый экипируется, надевает шлем 5 со встроенными очками виртуальной реальности и наушниками, подвесную систему 2, занимает положение, соответствующее изготовке парашютиста к отделению. Через управляющий компьютер 1 тренер (инструктор) задает данные о массе обучаемого, метеоусловиях, отработку штатной или нештатных ситуаций. Далее через управляющий компьютер 1 запускается программа, осуществляющая управление тренажером. Первоначально осуществляется моделирование в очках виртуальной реальности и наушниках шлема 5 момента покидания парашютистом летательного аппарата, после команды «Пошел» обучаемый делает поступательный толчок левой ногой вперед при этом верхняя рама 6 при помощи гидроцилиндра 11 поднимает парашютиста на требуемое расстояние вверх. Обучаемый получает визуальное, звуковое и динамическое сопровождение падения под стабилизирующим парашютом. Динамическое сопровождение заключается в импульсном вращении обучаемого вокруг своей оси за счет передачи движения вращающейся платформы 12 шаговым двигателем 14, в импульсном колебании в вертикальной плоскости за счет возвратно поступательной работы гидроцилиндра 11.
При выдергивании звена ручного открытия основного парашюта производится визуальное, звуковое и динамическое сопровождение, соответствующее раскрытию основного парашюта. Динамическое сопровождение заключается в максимально быстром подъеме парашютиста в наивысшую вертикальную позицию, при этом верхняя рама 6 за счет импульсного действия гидроцилиндра 11 максимально быстро поднимает парашютиста, моделируя при этом динамические нагрузки, соответствующие реальному раскрытию основного парашюта. Закон изменения динамической нагрузки обеспечивается работой гидроцилиндра 11. При этом обучаемый получает синхронизированное аудио-видео сопровождение через очки виртуальной реальности и наушники, встроенные в шлем 5, заключающееся в проецировании меняющихся сцен при вступлении в работу основного купола и генерации сопутствующих звуков.
Обучаемый обеспечивает сход слайдера (устройства рифления) для полного раскрытия основного парашюта. Для этого парашютист интенсивно перемещает левую 3 и правую 4 стропы управления. Информация о величинах перемещений строп 3 и 4 управления поступает на управляющий компьютер 1. Все результаты действий обучаемого регистрируются программно-аппаратным комплексом управляющего компьютера 1 для последующей оценки, также производится моделирование аудио-видео сопровождения в очках виртуальной реальности и наушниках, встроенных в шлем 5, и управляемого воздействия, в зависимости от действий парашютиста.
Далее обучаемый начинает ориентироваться в пространстве. При этом он через очки виртуальной реальности и наушники, встроенные в шлем 5, определяет свое положение, находит площадку и место приземления, учитывая метеоусловия, строит траекторию к месту приземления. Для этого парашютист использует левую 3 и правую 4 стропы управления. На всем протяжении управляемого снижения парашютист получает визуальное, звуковое и динамическое сопровождение. Динамическое сопровождение заключается в передаче обучаемому нагрузок, обеспечивающих их полное подобие реальному прыжку с парашютом, при этом осуществляется синхронное аудио-видео сопровождение через очки виртуальной реальности и наушники, встроенные в шлем 5. Вращающаяся платформа 12 за счет шагового двигателя 14 и зубчатой передачи 15 создает угловые ускорения, вращаясь вокруг своей оси, в зависимости от взаимного положения левой 3 и правой 4 строп управления.
При подготовке к приземлению обучаемый анализирует проецируемые в очках виртуальной реальности и наушниках встроенных, в шлем 5, элементы внешней среды, принимает решение по управлению парашютной системой для обеспечения безопасного приземления. Для этого с высоты 20-30 метров обучаемый полностью отпускает левую 3 и правую 4 стропы управления (в верхнее положение), набирает горизонтальную скорость, развиваемую штатной парашютной системой, и на высоте 5-10 метров втягивает левую 3 и правую 4 стропы управления, при этом, в зависимости от интенсивности и синхронности втягивания левой 3 и правой 4 строп управления, происходят различные варианты приземления парашютиста. Если обучаемый на требуемой высоте синхронно втянул левую 3 и правую 4 стропы управления, то происходит вспухание купола и на время 1-3 секунды вертикальная скорость снижается до 2 метров в секунду. Если обучаемый раньше втянет левую 3 и правую 4 стропы управления синхронно на полную длину рук (высота более 10 метров), то через 3 секунды он приобретает вертикальную скорость снижения более 7 метров в секунду, что влечет получение травм от удара о землю. Если обучаемый на требуемой высоте начинает синхронно вытягивать левую 3 и правую 4 стропы управления вначале плавно до плеч (горизонтальная скорость снижается до 1 метра в секунду), а затем более интенсивным движением на полную длину рук, то приземление происходит со скоростью близкой к 0. В случае не синхронного вытягивания левой 3 правой 4 стропы управления происходит вращение парашютиста и вертикальная скорость увеличивается до 9-10 метров в секунду, что влечет получение травм.
В зависимости от варианта выполняемого приземления, в момент касания парашютиста поверхности земли в работу вступает имитатор 16 приземления, при этом моделируются динамические нагрузки, действующие на ноги обучаемого. Интенсивность и нарастание динамических нагрузок задается управляющим компьютером 1 на основе данных, полученных программно-аппаратным комплексом, за счет подачи требуемой величины сигнала на соленоид 20.
Окончание динамического сопровождения происходит после касания ног верхней крышки 18 имитатора 16 приземления.
На тренажере выполняют отработку следующих нештатных ситуаций:
- полный отказ основного парашюта;
- невыход основного парашюта из камеры;
- несход слайдера (устройства рифления);
- порыв купола;
- закрутка строп.
Визуальное и аудиосопровождение перечисленных особых случаев обеспечивается за счет приводных механизмов, описанных ранее, а также имеющейся базы видео-аудиосцен, происходящих при возникновении нештатных ситуаций.
На всех режимах работы тренажера программно-аппаратный комплекс управляющего компьютера 1 сохраняет всю полетную информацию о моделируемых ситуациях и о действиях парашютиста на различных этапах прыжка, которую обрабатывает и представляет тренеру (инструктору) в виде готового материала для разбора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА | 2011 |
|
RU2578906C2 |
Изобретение относится к парашютной технике, а именно к конструкции тренажеров для парашютистов. Тренажер парашютиста состоит из управляющего компьютера, подвесной системы, левой и правой строп управления, шлема со встроенными очками виртуальной реальности и наушниками, системы датчиков и кабелей. Причем верхняя рама имеет возможность перемещения относительно основания за счет гидроцилиндра, в верхней части подвижной рамы установлена вращающаяся платформа, к которой прикреплены свободные концы подвесной системы. При этом вращение платформы осуществляется шаговым двигателем при помощи зубчатой передачи. Кроме того, в нижней части основания установлен имитатор приземления, состоящий из нижней плиты, верхней крышки со встроенным сердечником, соленоида. При этом перемещение крышки производится за счет действия соленоида. Повышается качество начальной подготовки парашютистов. 2 ил.
Тренажер парашютиста, содержащий управляющий компьютер, подвесную систему, левую и правую стропы управления, шлем со встроенными очками виртуальной реальности и наушниками, систему датчиков и кабелей, две стойки, электропривод, подвижную раму, отличающийся тем, что подвижная рама, выполнена с возможностью вертикального перемещения и установлена на верхних концах стоек, жестко закрепленных на основании, причем стойки выполнены в виде телескопических труб, подвижные части которых соединены ограничителем, на основании смонтирован гидроцилиндр со штоком, конец которого соединен с ограничителем, в верхней части подвижной рамы выполнена вращающаяся платформа, к которой прикреплены свободные концы подвесной системы, левая и правая стропы управления, причем платформа связана посредством зубчатой передачи с электроприводом, представляющим собой шаговый двигатель, в основании установлен имитатор приземления, состоящий из нижней плиты, верхней крышки со встроенным сердечником и соленоида, подключенного к управляющему компьютеру, к которому подключены также шаговый двигатель, гидроцилиндр, стропы управления и шлем.
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| US 4264311 A, 28.04.1981 | |||
| US 6000942 A, 14.12.1999. | |||

