Изобретение относится к парашютной технике, а именно к конструкции тренажеров для подготовки парашютиста. Тренажер для подготовки парашютиста может быть использован для практических тренировок и отработки элементов прыжка с купольным парашютом.
Для безопасного прыжка с парашютом одним из главных условий является должная подготовка парашютиста. Тренажер для наземной подготовки парашютиста обеспечивает возможность практических тренировок и отработки элементов прыжка задолго до первого прыжка с реальным парашютом, что положительно сказывается на моральной и практической подготовке обучаемого, позволяя существенно минимизировать выполнение неправильных действий при первом прыжке, что особенно актуально при возникновении нештатных ситуаций во время прыжка и спуска с парашютом.
Из уровня техники известны различные конструкции тренажеров для имитации прыжка с купольным парашютом.
Известен тренажер парашютиста-десантника (RU 2653900 C1, кл. B64D23/00, опубл. 2018 г.), содержащий управляющий компьютер, рабочее место инструктора (преподавателя), ранец с подвесной системой, левую и правую стропы управления, очки виртуальной реальности для моделирования в них системы визуализации внешней обстановки, систему датчиков и комплект кабелей. В конструкцию тренажера введены первая, вторая, третья и четвертая опоры, которые жестко соединены в верхней своей части соответственно с первой, второй, третьей и четвертой двутавровыми балками, образуя при этом пространство в виде четырехугольника, а на второй и четвертой двутавровых балках установлены пятая и шестая двутавровые балки с возможностью перемещения вдоль длинны второй и четвертой двутавровых балок за счет установленных на каждом из их концов по электроприводу, при этом между пятой и шестой двутавровой балкой установлена подвижная тележка, которая образована жестко соединенными первой, второй, третьей и четвертой швеллерными балками, при этом с возможностью перемещения вдоль длинны пятой и шестой двутавровой балки за счет установленной на второй швеллерной балке электропривода, при этом на первой и третьей швеллерной балке подвижной тележки установлены соответственно первый и второй электроприводы тросовых строп, с возможностью подъема (опускания) рамки подвеса парашютиста, к которой закреплены первый, второй и третий, четвертый свободные концы подвесной системы парашютиста с ранцем, при этом крепление тросовых строп осуществляют через первый и второй кронштейны привода осевого вращения, с возможностью вращения вокруг своей оси рамки подвеса парашютиста, к которой закреплена подвесная система парашютиста с ранцем, при этом перпендикулярно плоскости, образуемой первым и вторым свободными концам подвесной системы, на левом и правом концах рамки подвеса парашютиста размещены левый и правый электроприводы с возможностью сматывания (разматывания) строп управления под действием усилий левой и правой рук обучаемого на соответствующие звенья управления, кроме того очки виртуальной реальности снабжены встроенными в них аудионаушниками, кроме того, устройство регистрации положения рук выполнено в виде перчаток.
Недостатком вышеупомянутого тренажера парашютиста-десантника является отсутствие в его конструкции возвышенности, с которой спрыгивает обучаемый, что не позволяет в полной мере имитировать ощущения, испытываемые в момент реального прыжка с борта летательного аппарата. Также конструкция указанного тренажера имеет относительно большие габаритные размеры, что существенно замедляет скорость монтажа и демонтажа, а также ужесточает требования к размеру площадок, на которых её возможно разместить. Кроме того, работа упомянутого тренажера невозможна без применения большого количества дорогостоящего оборудования, что приводит к дороговизне конструкции.
Из уровня техники также известен разработанный Производственным Объединением «Зарница» интерактивный тренажер-имитатор парашютного прыжка "Прыжок-1" с системой виртуальной реальности (Интерактивный тренажер-имитатор парашютного прыжка "Прыжок-1" с системой виртуальной реальности (раздел «Физическая подготовка»)\ (zarnitza.ru)), представляющий собой совокупность подвесной системы со стропами, стереоскопической системы виртуальной реальности и рабочего места инструктора.
Недостатками тренажера-имитатора «Прыжок 1» являются: отсутствие имитации покидания борта летательного аппарата, отсутствие имитации приземления после прыжка, а также отсутствие динамического воздействия на обучаемого при раскрытии парашюта.
Кроме того, известен тренажер парашютиста (RU 2712355 C1, кл. B64D23/00, опубл. 2020 г.), содержащий управляющий компьютер, подвесную систему, левую и правую стропы управления, шлем со встроенными очками виртуальной реальности и наушниками, систему датчиков и кабелей, две стойки, электропривод, подвижную раму, при этом подвижная рама, выполнена с возможностью вертикального перемещения и установлена на верхних концах стоек, жестко закрепленных на основании, причем стойки выполнены в виде телескопических труб, подвижные части которых соединены ограничителем, на основании смонтирован гидроцилиндр со штоком, конец которого соединен с ограничителем, в верхней части подвижной рамы выполнена вращающаяся платформа, к которой прикреплены свободные концы подвесной системы, левая и правая стропы управления, причем платформа связана посредством зубчатой передачи с электроприводом, представляющим собой шаговый двигатель, в основании установлен имитатор приземления, состоящий из нижней плиты, верхней крышки со встроенным сердечником и соленоида, подключенного к управляющему компьютеру, к которому подключены также шаговый двигатель, гидроцилиндр, стропы управления и шлем.
Недостатком указанного тренажера является то, что в нем конструктивно не предусмотрена ступень или площадка, с которой обучаемый совершает прыжок, что отрицательно сказывается на качестве его подготовки.
Помимо этого, известна система, имитирующая прыжки с парашютом, основанная на технологии виртуальной реальности (KR 101810834 B1, кл. G02B27/01, G09B9/00, опубл. 2017 г.), которая содержит опорную раму, подвесную систему, которую надевает обучаемый, стропы управления парашютом, блок управления прыжком, шлем виртуальной реальности, датчики движения для определения положения обучаемого, информационная база данных 3D-изображений, включающая информацию о моделировании 3D-объектов, такую как парашют и самолет, информацию об обучаемых, информацию о трехмерном моделировании местности и т.д., модуль обработки изображений, блок извлечения данных о положении обучаемого и блок рендеринга.
Недостатком известной системы является отсутствие платформ для спрыгивания и приземления, подъем тренируемого осуществляется серводвигателями, что увеличивает стоимость и уменьшает надежность конструкции по сравнению с конструкциями, содержащими платформы для спрыгивания и приземления. Также отсутствие платформы для спрыгивания не позволяет в полной мере передать ощущения, испытываемые в момент реального прыжка с борта летательного аппарата.
Также известен способ подготовки парашютиста и система для его осуществления (KR 20160063019 A, кл. A63B69/00, B64D23/00, опубл. 2016 г.), содержащий установленный на раме приводной блок для поворота тела обучаемого по часовой стрелке или против часовой стрелки за счет работы первого рулевого троса и второго рулевого троса; сенсорную часть, воспринимающую движение головы обучаемого; и часть управления, выводящую трехмерное видео спуска, соответствующее направлению взгляда обучаемого на мониторе или в очках, которые носит обучаемый, с использованием угла поворота тела обучаемого и движения головы обучаемого.
Недостатком указанного способа и системы для его осуществления является отсутствие платформ для спрыгивания и приземления, подъем тренируемого осуществляется серводвигателями, что увеличивает стоимость и уменьшает надежность конструкции по сравнению с конструкциями, содержащими платформы для спрыгивания и приземления. Также отсутствие платформы для спрыгивания не позволяет в полной мере передать ощущения, испытываемые в момент реального прыжка с борта летательного аппарата.
Из уровня техники также известен тренажер виртуального спуска на парашюте (KR 101953167 B1, кл. B64D23/00, G02B27/01, G09B9/00, опубл. 2019 г.), содержащий дисплей для отображения трехмерного изображения, соответствующего движению обучаемого; буксировочные тросы, соединенные одним из буксировочных тросов, подвесная система парашюта, регулировочный трос, и шкивы, предусмотренные в верхней части рамы основного корпуса, для обеспечения перемещения буксировочных тросов. Трехмерное изображение, соответствующее движению обучаемого, может быть выведено на внешний дисплей и на HMD (очки-дисплей) обучаемого.
Недостатком известного тренажера является отсутствие площадки для спрыгивания, что не в полной мере передаёт ощущения, испытываемые в момент реального прыжка с борта летательного аппарата.
Кроме того, известна система управления и динамического моделирования спуска на парашюте (CN 107154194 A, кл. G09B9/00, опубл. 2017 г.), состоящая из рамы, динамической подсистемы, подсистемы управления, подсистемы привязных ремней.
Недостатком указанной системы управления и динамического моделирования является отсутствие площадки для спрыгивания, что не в полной мере передаёт ощущения, испытываемые в момент реального прыжка с борта летательного аппарата.
Прототипом заявляемого изобретения является обучающий тренажер для имитации приземления с парашютом (CN 215932896 U, кл. B64D23/00, G09B9/00, опубл. 2022 г.), содержащий каркас в форме параллелепипеда, установленный на парашютной тренировочной площадке. Верхняя часть каркаса снабжена подвижной платформой для имитации реального движения парашюта, причем подвижная платформа соединена с пультом управления тренажером; одна сторона нижней части каркаса снабжена платформой для прыжка, расположенной под подвижной платформой для отработки действий при покидании борта летательного аппарата; в нижней части каркаса, на стороне, противоположной той, на которой установлена платформа для прыжка, расположено устройство подачи воздуха, направление подачи воздуха которого обращено внутрь каркаса, с целью имитации обдува ветром в процессе десантирования; управление устройством подачи воздуха осуществляется посредством его связи с пультом управления тренажером; подвижная платформа включает в себя неподвижную раму, механизм управления подвесной системой, соединенный с неподвижной рамой, и подвесную систему, подвешенную под механизмом управления подвесной системой; механизм управления подвесной системой включает в себя верхнюю движущуюся платформу и нижнюю движущуюся платформу, расположенную под верхней движущейся платформой, и подвесные ремни.
Недостатком указанного обучающего тренажера является то, что конструкция тренажера имеет относительно большие габаритные размеры, что существенно замедляет скорость его сборки, монтажа и демонтажа, а также ужесточает требования к размеру площадок, на которых его можно разместить. Помимо этого, конструкция указанного обучающего тренажера является сложной и имеет множество составных частей и их соединений, что также отрицательным образом сказывается на скорости сборки, монтажа и демонтажа, а также повышает стоимость.
Проблемой, на решение которой направлено изобретение, является разработка тренажера для наземной подготовки парашютиста к прыжку с купольным парашютом, имитация приземления на котором реализуется за счет действия силы тяжести Земли.
Технический результат изобретения заключается в повышении жесткости конструкции, простоты транспортировки и удобства монтажа и демонтажа.
Поставленная проблема и заявленный технический результат достигаются тем, что тренажер для наземной подготовки парашютиста содержит неподвижную раму, закрепленную на передней и задней П-образных стойках. Передняя П-образная стойка является разборной и состоит из трех балок, соединенных между собой болтовыми соединениями. Задняя П-образная стойка является разборной и состоит из трех балок, соединенных между собой болтовыми соединениями. Причем задняя П-образная стойка выше передней П-образной стойки. Таким образом, неподвижная рама расположена под углом относительно оси, параллельной поверхности Земли. Тренажер также содержит подвесную систему парашюта, установленные на неподвижной раме движущуюся каретку и электродвигатель для автоматического перемещения каретки вдоль неподвижной рамы от передней П-образной стойки к задней П-образной стойке, площадку для приземления, например, наклонную, ступень для прыжка, рабочее место оператора. Рабочее место оператора состоит из управляющего компьютера, дисплея, микрофона, например, встроенного в дисплей, а также дополнительно может содержать дублирующие функции компьютера управляющие устройства, например, пульт управления тренажером, кнопка аварийной остановки. Кронштейн для крепления дисплея и микрофона, кнопка аварийной остановки и подставка для пульта управления тренажером могут крепиться в любом удобном для оператора месте на силовых элементах конструкции, например, на передней П-образной стойке, при этом микрофон и пульт управления тренажером могут быть как проводными, так и беспроводными, также микрофон может быть встроенным в дисплей. Управление тренажером может осуществляться с управляющего компьютера или, например, с пульта управления. Управляющий компьютер электрическими кабелями соединен с дисплеем, дисплей устанавливается на специальную подставку, которая болтами крепится к передней П-образной стойке снаружи, также на передней П-образной стойке расположена подставка для пульта управления. Пульт управления тренажером представляет собой известное из уровня техники кнопочное электронное устройство для удаленного (дистанционного) управления тренажером на расстоянии. Пульт управления дублирует функцию кнопки аварийной остановки и некоторые функции управляющего компьютера, а именно - с пульта управления оператор может подавать следующие команды: аварийная остановка работы тренажера, автоматическое перемещение каретки вдоль неподвижной рамы от передней П-образной стойки к задней П-образной стойке и закрытие тормозного механизма для каретки. Тренажер для наземной подготовки парашютиста также содержит основание (в частном случае снизу основания могут быть установлены регулируемые по высоте ножки для выравнивания положения тренажера на не ровной поверхности пола), тормозной механизм для каретки, который крепится к продольным сторонам неподвижной рамы, систему датчиков и кабелей, аудионаушники и очки или шлем виртуальной реальности со встроенными аудионаушниками и очками виртуальной реальности. Система датчиков и кабелей предназначена для считывания и преобразования физической величины в электрический сигнал и его последующей передачи на электронные устройства. В предложенном тренажере используются следующие датчики:
- датчики строп, регистрирующие величину натяжения строп управления обучаемым;
- датчики, расположенные в очках виртуальной реальности, которые регистрируют положение головы обучаемого.
В предложенном тренажере электрические кабели используются для следующих целей:
- осуществление связи между управляющим компьютером и дисплеем, микрофоном;
- данные натяжения строп фиксируются концевыми выключателями и с помощью электрических кабелей передаются на промежуточные механизмы, а затем на управляющий компьютер;
- данные о положении головы обучаемого, зарегистрированные датчиками, передаются по электрическим кабелям на управляющий компьютер;
- с помощью электрических кабелей передается команда оператора из микрофона в шлем или аудионаушники.
В данном случае под промежуточными механизмами следует понимать шкаф управления.
Неподвижная рама закреплена при помощи кронштейнов на передней и задней П-образных стойках, закрепленных при помощи уголков и болтов на основании, которое жестко установлено на поверхности пола. К неподвижной раме с помощью болтовых соединений прикреплен электродвигатель для автоматического перемещения каретки вдоль неподвижной рамы от передней П-образной стойки к задней П-образной стойке. Рельсы, по которым движется каретка, приварены к двум параллельным друг другу продольным сторонам неподвижной рамы с внутренней стороны рамы. Тросы подвесной системы парашюта подвешены за крючки на движущейся каретке, а тормозной механизм для движущейся каретки крепится к продольным сторонам неподвижной рамы болтовыми соединениями. Площадка для приземления соединена с основанием при помощи болтовых соединений. Ступень для прыжка является разборной и состоит из профильных труб и, по меньшей мере, четырех металлических листов. Металлические листы болтовыми соединениями крепятся к каркасу, представляющему собой соединенные между собой профильные трубы. Ступень для прыжка крепится к задней П-образной стойке и к основанию при помощи болтовых соединений.
Таким образом, поставленная проблема достигается тем, что задняя П-образная стойка выше передней П-образной стойки, что позволяет расположить неподвижную раму под углом относительно оси, параллельной поверхности Земли, и обеспечить работоспособность конструкции тренажера за счет действия силы тяжести Земли. Это позволяет значительно упростить конструкцию, сократить количество входящих в нее узлов и деталей, сократить затраты на ее изготовление, а также уменьшить количество потребляемой электроэнергии, необходимой для функционирования тренажера.
Технический результат изобретения, заключающийся в повышении жесткости конструкции, обеспечивается за счет того, что П-образные стойки дополнительно соединены с основанием при помощи раскосов. Также для достижения данного технического результата в конструкцию передней и задней П-образных стоек введены косынки усиления из листового металла, которые крепятся к стойкам при помощи болтовых соединений.
Технический результат изобретения, заключающийся в повышении простоты транспортировки и удобства монтажа и демонтажа, обеспечивается за счет использования большого количества разборных узлов и деталей конструкции, применения преимущественно болтовых соединений и отсутствия крупногабаритных неразборных составных частей конструкции. Это позволяет транспортировать тренажер в разобранном виде на транспортных средствах с различными габаритами грузовых отсеков. Также за счёт использования большого количества разборных узлов и деталей смягчаются требования к линейным размерам входных групп (например, коридорам и дверным проёмам) помещений, в которых возможно установить тренажер. Если габариты транспортного средства или входной группы помещения позволяют, для повышения скорости сборки тренажера его можно разбирать частично.
Сущность изобретения и принцип его работы поясняются чертежами, где:
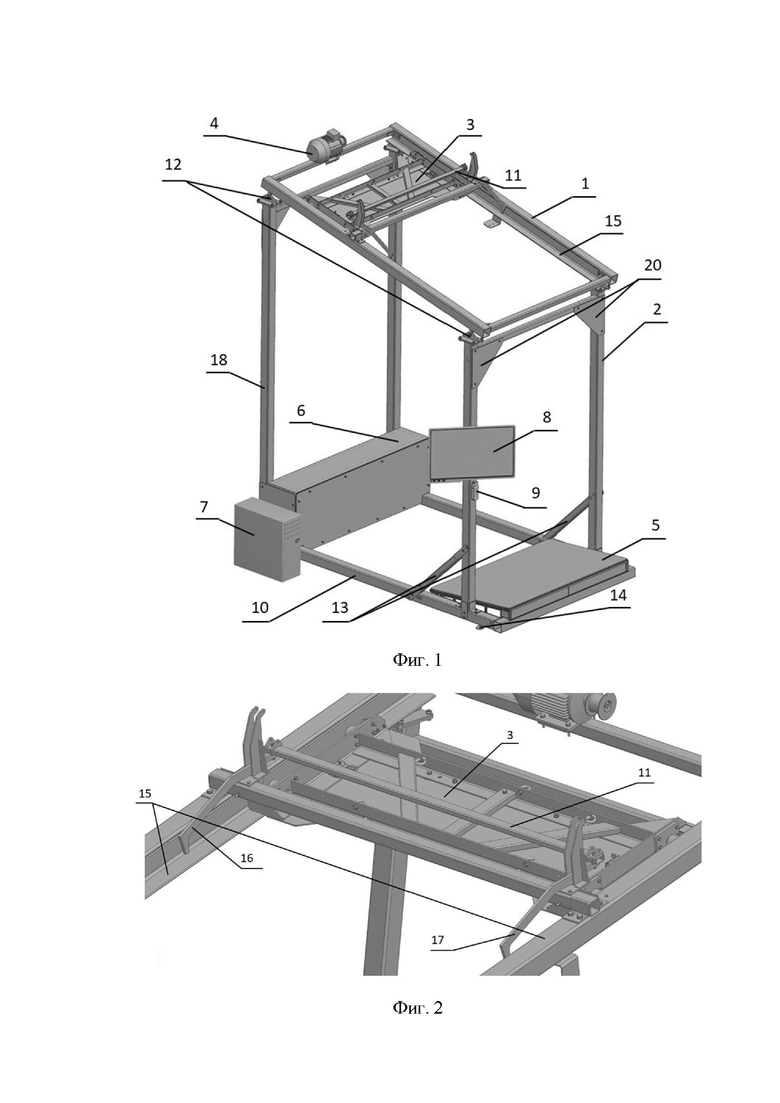
на фиг. 1 представлен общий вид тренажера для наземной подготовки парашютиста;
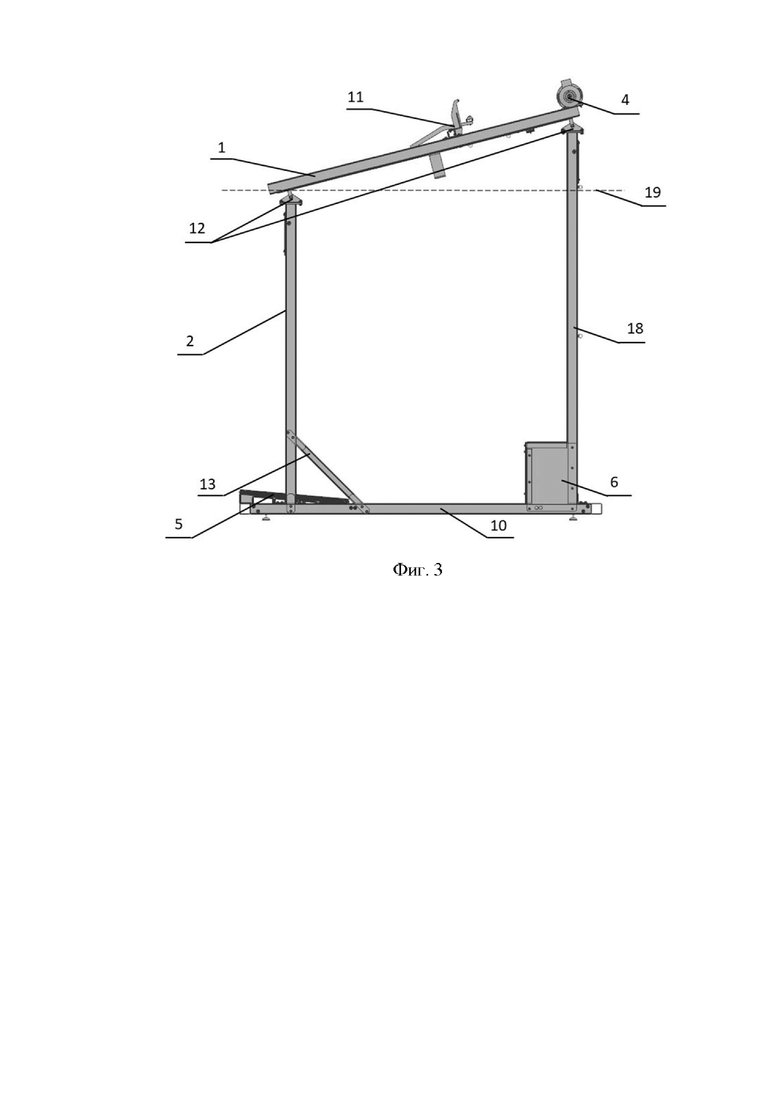
на фиг. 2 - тормозной механизм;
на фиг. 3 - тренажер для наземной подготовки парашютиста, вид сбоку.
Тренажер парашютиста содержит неподвижную раму 1, закрепленную при помощи кронштейнов 12 сверху на передней П-образной стойке 2, являющейся разборной и состоящей из трех балок, соединенных между собой болтовыми соединениями, и задней П-образной стойке 18, являющейся разборной и состоящей из трех балок, соединенных между собой болтовыми соединениями. Причем неподвижная рама 1 расположена под углом относительно оси 19, параллельной поверхности Земли, за счет того, что передняя П-образная стойка 2 ниже задней П-образной стойки 18. Также тренажер содержит подвесную систему парашюта (на фиг. не показана), которая представляет собой известное из уровня техники серийно выпускаемое изделие, предназначенное для размещения парашютиста при отработке учебных задач. Подвесная система состоит из ранца, косынки стабилизирующего парашюта, левой и правой пары свободных концов, левой и правой строп управления, имеющих эластичные тросы на концах, парашютного кольца, двухконусного замка, пряжек силовых лент и временного парашютного прибора. Также тренажер парашютиста содержит движущуюся за счет силы тяжести Земли каретку 3, на которой закреплены ремни с фиксатором, позволяющие отрегулировать высоту, на которую подвешивается обучаемый, в соответствии с его ростом (на фиг. не показаны), электродвигатель 4 для автоматического перемещения каретки 3 вдоль неподвижной рамы 1 от передней П-образной стойки 2 к задней П-образной стойке 18, наклонную площадку для приземления 5, ступень для прыжка 6, управляющий компьютер 7, дисплей 8, микрофон (на фиг. не показан), пульт управления 9 на подставке (на фиг. не показана), основание 10, тормозной механизм 11, систему датчиков и кабелей (на фиг. не показана), предназначенную для считывания и преобразования физической величины в электрический сигнал и его последующей передачи на электронные устройства, шлем виртуальной реальности со встроенными аудионаушниками и очками виртуальной реальности (на фиг. не показан).
Неподвижная рама 1 закреплена при помощи кронштейнов 12 сверху на передней 2 и задней 18 П-образных стойках, закрепленных при помощи уголков и болтов на основании 10. Для усиления жесткости конструкции П-образные стойки 2 и 18 дополнительно соединены с основанием 10 при помощи раскосов 13. Также в конструкцию П-образных стоек 2 и 18 входят косынки усиления 20 передней П-образной стойки 2 и косынки усиления (на фиг. не показаны) задней П-образной стойки 18. Основание 10 жестко установлено на поверхности пола на регулируемых по высоте ножках 14. Ножки 14 выполнены с возможностью регулирования по высоте для придания устойчивости тренажеру в случае неровности пола.
К неподвижной раме 1 с помощью болтовых соединений прикреплен электродвигатель 4 для автоматического перемещения каретки 3 вдоль неподвижной рамы 1 от передней П-образной стойки 2 к задней П-образной стойке 18 после завершения тренировки. Рельсы 15, по которым движется каретка 3, приварены к двум параллельным друг другу продольным сторонам неподвижной рамы 1 с внутренней стороны рамы. Левые и правые пары регулируемых ремней с фиксатором соединяются со свободными концами подвесной системы парашюта при помощи карабинов, и левая и правая стропы управления имеют на своих концах эластичные тросы, которыми фиксируются на движущейся каретке 3, к которой также с помощью регулируемого ремня крепится косынка стабилизирующего парашюта. Система датчиков строп управления, расположенных на каретке 3, регистрирует величины натяжения строп управления обучаемым. Данные о величине натяжения строп управления с помощью электрического кабеля передаются на промежуточные механизмы (шкаф управления) для последующей обработки программно-аппаратным комплексом управляющего компьютера 7. В данном случае программно-аппаратный комплекс представляет собой набор технических и программных средств, работающих совместно для выполнения одной или нескольких сходных задач.
Тормозной механизм 11 для движущейся каретки 3 крепится к продольным сторонам неподвижной рамы 1 болтовыми соединениями. Тормозной механизм 11 регулирует движение каретки 3, осуществляемое за счет силы тяжести Земли, посредством двух актуаторов (на фиг. не показаны) и двух рычагов 16 и 17, блокируя движение каретки 3 по рельсам 15 на заданный оператором промежуток времени. При помощи актуаторов рычаги 16 и 17 поднимаются (положение «открыт») и опускаются (положение «закрыт»).
Наклонная площадка для приземления 5 соединена с основанием 10 при помощи болтовых соединений. Ступень для прыжка 6 является разборной и состоит из профильных труб (на фиг. не показаны) и, по меньшей мере, четырех металлических листов. Металлические листы болтовыми соединениями крепятся к каркасу, представляющему собой соединенные между собой профильные трубы. Ступень для прыжка 6 крепится к задней П-образной стойке 18 и к основанию 10 при помощи болтовых соединений.
Рабочее место оператора представляет собой управляющий компьютер 7, соединенный электрическим кабелем с дисплеем 8 с кронштейном (на фиг. не показан). Кронштейн болтами крепится к передней П-образной стойке 2. В процессе работы тренажера оператор осуществляет управление тренировкой при помощи дисплея 8 и может координировать действия обучаемого и подавать команды обучаемому при помощи микрофона. Управляющий компьютер 7 предназначен для обеспечения работы тренажера за счет программно-аппаратного комплекса, в частности, для задания начальных условий тренировки, включающих в себя данные о времени суток (день, ночь), высоте прыжка (600 - 3000 м), метеоусловиях (туманность, дождь, скорость и направление ветра, которое меняется в зависимости от высоты) и режиме тренировки (отработка штатной или нештатной ситуации). Библиотека графических трехмерных объектов, содержащаяся на управляющем компьютере 7, по проводной связи проецируется на встроенные в шлем виртуальной реальности очки виртуальной реальности, надетые на обучаемого. Библиотека графических трехмерных объектов включает в себя предметы визуального воплощения окружающей среды и погодных условий (облака, небесные тела (луна, звезды), дождь, туманность), различные типы местности (равнина, лесной массив, поляна, холмистая местность) и инфраструктуры (автомобильные дороги, линии электропередач, отдельно стоящие деревья, здания разных типов). В зависимости от изменения положения тела обучаемого (например, прыжок со ступени для прыжка, поворот головы, движение во время перемещения каретки, рывок для имитации раскрытия основного купола парашюта, сгибание и разгибание колен во время приземления) изменяется и наблюдаемая им в очках окружающая среда в виртуальной реальности.
На передней П-образной стойке 2 возле дисплея 8 расположен пульт управления 9 на подставке таким образом, чтобы при возникновении неисправности в оборудовании тренажера оператор мог незамедлительно предотвратить несчастный случай посредством аварийной остановки, нажав на кнопку аварийной остановки, расположенной автономно или в составе пульта управления 9.
Шлем виртуальной реальности представляет собой известное из уровня техники серийно выпускаемое устройство и предназначен для создания видео-аудио сопровождения обучаемого. За счет имеющейся в составе очков виртуальной реальности системы датчиков определяется положение головы обучаемого, что приводит к динамическому изменению панорамы окружающей обстановки. Посредством отслеживания положения очков за счет внешних или встроенных в очки камер в виртуальной реальности, обрабатываемой на управляющем компьютере 7, изменяется панорама окружающей среды.
Предлагаемый тренажер для наземной подготовки парашютиста работает следующим образом.
Тренировка обучаемого на предлагаемом тренажере состоит из трех этапов: покидание борта летательного аппарата, спуск с купольным парашютом, приземление.
Перед началом тренировки обучаемый встает на ступень для прыжка 6, надевает подвесную систему парашюта, шлем со встроенными очками виртуальной реальности и аудионаушниками, занимает положение, соответствующее готовности к прыжку с борта летательного аппарата. С помощью дисплея 8 управляющего компьютера 7 оператор задает начальные условия, включающие в себя данные о времени суток (день, ночь), высоте прыжка (600 - 3000 м), метеоусловиях (дождь, скорость и направление ветра, которое меняется в зависимости от высоты) и режиме тренировки (отработка штатной или нештатной ситуации). При этом регулирование высоты прыжка через управляющий компьютер 7 отражается исключительно на длительности этапа спуска с купольным парашютом: чем меньше высота, тем быстрее обучаемый приземлится. Далее через управляющий компьютер 7 запускается программа, осуществляющая управление тренажером.
Этап покидания борта летательного аппарата сопровождается визуальными и звуковыми воздействиями на обучаемого и осуществляется следующим образом. В шлеме виртуальной реальности моделируется момент покидания обучаемым борта летательного аппарата: слышен шум от двигателей летательного аппарата и, при опускании взгляда вниз, обучаемому видно, что он стоит на краю борта летательного аппарата. Далее во встроенных в шлем аудионаушниках обучаемый слышит команду оператора «Старт», передаваемую из микрофона, в шлем виртуальной реальности посредством электрического кабеля, и прыгает со ступени для прыжка 6. В этот момент каретка 3 за счет силы тяжести Земли начинает движение по рельсам 15 и в момент ее касания рычагов 16 и 17 тормозного механизма 11 останавливается (положение «закрыт»). Вследствие этого обучаемый подвешивается в воздухе перпендикулярно земле на косынке стабилизирующего парашюта, которая закреплена на подвесной системе посредством двухконусного замка и до раскрытия основного парашюта является единственной нагруженной точкой крепления парашютиста к каретке (в этот момент свободные концы ослаблены). Таким образом обеспечивается возможность полунатурной имитации этапа покидания борта летательного аппарата.
Этап спуска с купольным парашютом сопровождается визуальными, звуковыми и динамическими воздействиями на обучаемого и осуществляется следующим образом. Визуальное и звуковое сопровождение заключается в генерации звуков, проецировании меняющейся панорамы: в шлеме виртуальной реальности проигрывается анимация раскрытия купольного парашюта.
Динамическое сопровождение заключается в резком рывке обучаемого при раскрытии купольного парашюта. После отделения от летательного аппарата обучаемый висит на косынке стабилизирующего парашюта, что осуществляется за счет разной длины точек крепления (длина регулируемого ремня с фиксатором у косынки стабилизирующего парашюта меньше, чем длина регулируемых ремней свободных концов). При выдергивании кольца, либо через 3 секунды (отсчитываемых временным парашютным прибором) происходит раскрытие двухконусного замка и освобождение пряжек силовых лент косынки стабилизирующего парашюта, вследствие чего обучаемый резко опускается вниз до натяжения свободных концов, в это же время в шлеме виртуальной реальности отображается раскрытие купола основного парашюта. После этого обучаемый поднимает голову и осматривает купол на предмет его целостности, в виртуальной реальности находит стропы управления и берется за их реальную реплику руками. С помощью системы датчиков строп управления, расположенных на каретке, данные о величинах натяжения строп управления поступают на управляющий компьютер 7. Результаты действий обучаемого регистрируются программно-аппаратным комплексом управляющего компьютера 7 для последующего моделирования визуального и звукового сопровождения в шлеме виртуальной реальности. Программно-аппаратный комплекс управляющего компьютера 7 генерирует изменения в виртуальном пространстве с учетом данных, поступающих от системы датчиков, например, изменения положения в виртуальном пространстве частей тела обучаемого или положения облаков, поверхности Земли. Датчики расположены на теле (на руках, на ногах и на голове) обучаемого, а климатическая обстановка вокруг него изменяется с монитора и задается оператором.
Этап приземления осуществляется следующим образом. При подготовке к приземлению обучаемый анализирует проецируемую в шлеме виртуальной реальности окружающую среду, оценивает местность для обеспечения безопасного приземления. При приближении к поверхности Земли с высоты около 100 метров обучаемый полностью отпускает стропы управления и принимает правильное для приземления положение тела. Обучаемый понимает, что достиг высоты 100 метров в тот момент, когда он начинает отчетливо различать траву. Перед тренировкой ему дается такая инструкция оператором.
В этот момент с управляющего компьютера 7 подается управляющий сигнал на актуаторы. Сразу после этого актуаторы тормозного механизма 11 поднимают рычаги 16 и 17 (положение «открыт»), тем самым разблокировав дальнейшее движение каретки 3 за счет силы тяжести Земли по рельсам 15. Каретка 3 движется за счет силы тяжести Земли по рельсам 15 до тех пор, пока не достигнет передней стороны неподвижной рамы 1. В этот момент каретка 3 останавливается, а обучаемый касается ногами наклонной площадки для приземления 5. После этого обучаемый самостоятельно или с помощью оператора снимает с себя шлем виртуальной реальности, ранец и сходит с наклонной площадки для приземления 5. Тренировка завершается.
После завершения тренировки по команде оператора с дисплея 8 управляющего компьютера 7 или с пульта управления 9, поступающей на промежуточные механизмы, а затем на электродвигатель 4, осуществляется автоматическое перемещение каретки 3 вдоль неподвижной рамы 1 от передней П-образной стойки 2 к задней П-образной стойке 18. Затем оператор вручную вводит пряжки силовых лент в двухконусный замок и монтирует на нём петлю звена ручного раскрытия и серьгу временного парашютного прибора. Таким образом тренажер для наземной подготовки парашютиста приводится в готовность для начала следующей тренировки. Тормозной механизм 11 приводится в положение «закрыт» по команде оператора с дисплея 8 управляющего компьютера 7 или с пульта управления 9 на промежуточные механизмы, а с них на актуаторы.
При возникновении неисправности в оборудовании тренажера, возникшей в процессе прохождения тренировки, оператор незамедлительно нажимает на кнопку аварийной остановки, расположенной автономно или в составе пульта управления 9, для предотвращения несчастного случая.
Помимо описанного выше штатного прыжка с купольным парашютом тренажер для наземной подготовки парашютиста позволяет отрабатывать нештатные ситуации, которые могу возникнуть при прыжке с реальным парашютом, такие как: полный отказ основного парашюта, обрыв или перехлест строп и порыв купола. Визуальное и звуковое сопровождение данных нештатных ситуаций обеспечивается за счет описанных ранее механизмов, применяющихся при отработке штатного полета, а также за счет имеющейся базы видео и аудиосцен, происходящих при возникновении нештатных ситуаций.
В настоящее время тренажер для наземной подготовки парашютиста находится на стадии изготовления. Прототип предлагаемого тренажера для наземной подготовки парашютиста изготовлен и исправно функционирует.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА | 2019 |
|
RU2712355C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| Способ наземной отработки элементов парашютной подготовки и устройство, его реализующее | 2023 |
|
RU2832674C2 |
Изобретение относится к парашютной технике, а именно к конструкции тренажеров для подготовки парашютиста. Тренажер для наземной подготовки парашютиста содержит неподвижную раму, переднюю и заднюю П-образные стойки, подвесную систему парашюта, движущуюся каретку, электродвигатель для автоматического перемещения каретки вдоль неподвижной рамы от передней П-образной стойки к задней П-образной стойке, площадку для приземления, ступень для прыжка, рабочее место оператора, основание, тормозной механизм для каретки, систему датчиков и кабелей, шлем виртуальной реальности. Задняя П-образная стойка выше передней П-образной стойки, за счет чего неподвижная рама расположена под углом относительно оси, параллельной поверхности Земли, и каретка может перемещаться от задней П-образной стойки к передней П-образной стойке за счет действия силы тяжести Земли. Повышается уровень подготовки парашютистов. 10 з.п. ф-лы, 3 ил.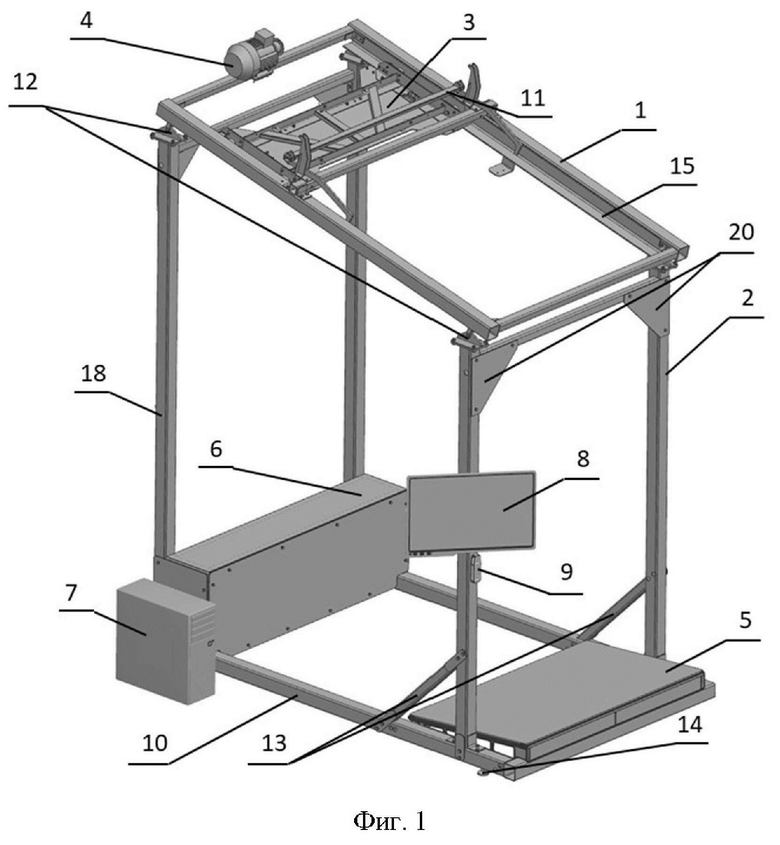
1. Тренажер для наземной подготовки парашютиста содержит неподвижную раму, закрепленную на передней и задней П-образных стойках, подвесную систему парашюта, установленные на неподвижной раме движущуюся каретку и электродвигатель для автоматического перемещения каретки вдоль неподвижной рамы от передней П-образной стойки к задней П-образной стойке, площадку для приземления, ступень для прыжка, рабочее место оператора, состоящее из управляющего компьютера, микрофона и дисплея, который устанавливается на специальную подставку, болтами крепящуюся к передней П-образной стойке снаружи, тренажер для наземной подготовки парашютиста также содержит основание, тормозной механизм для каретки, который крепится к продольным сторонам неподвижной рамы, систему датчиков и кабелей, шлем виртуальной реальности со встроенными аудионаушниками и очками виртуальной реальности, причем задняя П-образная стойка выше передней П-образной стойки, за счет чего неподвижная рама расположена под углом относительно оси, параллельной поверхности Земли, и каретка может перемещаться от задней П-образной стойки к передней П-образной стойке за счет действия силы тяжести Земли, передняя П-образная стойка является разборной и состоит из трех балок, соединенных между собой болтовыми соединениями, задняя П-образная стойка является разборной и состоит из трех балок, соединенных между собой болтовыми соединениями, неподвижная рама закреплена при помощи кронштейнов на передней и задней П-образных стойках, закрепленных при помощи уголков и болтов на основании, которое жестко установлено на поверхности пола, электродвигатель прикреплен к неподвижной раме с помощью болтовых соединений, рельсы, по которым движется каретка, приварены к двум параллельным друг другу продольным сторонам неподвижной рамы с внутренней стороны рамы, тросы подвесной системы парашюта подвешены за крючки на движущейся каретке, а тормозной механизм для движущейся каретки крепится к продольным сторонам неподвижной рамы болтовыми соединениями, площадка для приземления соединена с основанием при помощи болтовых соединений, ступень для прыжка является разборной и состоит из профильных труб и по меньшей мере четырех металлических листов, металлические листы болтовыми соединениями крепятся к каркасу, представляющему собой соединенные между собой профильные трубы, ступень для прыжка крепится к задней П-образной стойке и к основанию при помощи болтовых соединений, П-образные стойки дополнительно соединены с основанием при помощи раскосов, в конструкцию передней и задней П-образных стоек введены косынки усиления из листового металла, которые крепятся к стойкам при помощи болтовых соединений.
2. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что снизу основания установлены регулируемые по высоте ножки.
3. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что микрофон встроен в дисплей.
4. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что дисплей является сенсорным.
5. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что к силовому элементу конструкции крепится кнопка аварийной остановки.
6. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что в качестве дублирующего управляющего устройства дополнительно введен пульт управления тренажером.
7. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что управляющий компьютер с дисплеем представляет собой сенсорный моноблок.
8. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что микрофон соединен с управляющим компьютером беспроводной связью.
9. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что на ступени для прыжка установлена беговая дорожка.
10. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что на площадке для приземления установлена беговая дорожка.
11. Тренажер для наземной подготовки парашютиста по п.1, отличающийся тем, что площадка для приземления является наклонной.
| CN 215932896 U, 01.03.2022 | |||
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| ПАРАШЮТНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ К ПРЫЖКАМ НА ВОДУ | 2017 |
|
RU2655230C1 |
