Изобретение относится к области машиностроения, конкретнее к тракторостроению, и предназначено для оптимизации тягово-сцепных показателей машинно-тракторных агрегатов с навесными сельскохозяйственными орудиями, воздействие которых на трактор передается звеньями навесного устройства.
Зачастую в машинно-тракторных агрегатах, работающих с навесным почвообрабатывающим орудием, из-за несанкционированного смещения центра масс под действием силы тяги ухудшаются условия работы отдельных компонентов трактора и, что особенно важно, его ходовой системы - это приводит к перегрузкам задней оси трактора и тем самым к снижению служебных характеристик машинно-тракторного агрегата (МТА), а также к тому, что при этом в ряде случаев возрастает давление на почву, в результате которого возможно разрушение ее структуры и снижение плодородия.
Поэтому в большинстве известных в настоящее время решений, направленных на то, чтобы обеспечивать оптимальное нагружение опорных элементов ходовой системы трактора в течение длительного времени, которое занимает непосредственная работа при выполнении определенной полевой операции, наблюдается большое разнообразие приемов осуществления требуемого смещения центра масс, поскольку требования к оптимальному нагружению ходовых систем в различных типах тракторов различны: в гусеничных тракторах требуется равномерное распределение нагрузок по каткам; в колесных тракторах требуется догрузка задних ведущих колес большего размера, либо одинакового нагружения для тракторов с передними и задними ведущими колесами одинакового размера, либо других вариантов.
Так например, известны способы выравнивания нагрузок догружением колес трактора с использованием навешиваемого балластного груза (RU 2340504, 2008 г.) или дополнительных опорных колес на навеске (RU 2397630, 2010 г.). Недостаток таких приемов заключается в том, что в режиме транспортировки (при отсутствии силы тяги) и баллостирование и наличие дополнительных опорных колес приведет к повышенным потерям мощности на перекатывание МТА и увеличению расхода топлива.
Известны также способы, основанные на регулировании положения центра давления и перераспределения массы по длине опорной поверхности трактора, например смещением рамы, несущей гусеничные движители (RU 2033363, 1995 г.), или передних кареток гусеничных движителей (SU 958201, 1982 г.) относительно основной несущей рамы трактора; либо путем изменения величины давления, передаваемого на грунт направляющим колесом посредством дополнительного, встроенного в трактор, оборудования - гидравлического механизма слежения (SU 1655836, 1991 г.).
Общим недостатком, присушим таким решениям, является необходимость специализации тракторов под определенный ряд рабочих орудий и перенасыщенность их компоновочных решений дополнительными узлами и механизмами, что усложняет алгоритм процесса выравнивания нарузок и может вносить в него погрешности.
Этот недостаток отсутствует в известных способах оптимизации тягово-сцепных показателей МТА, основанных на регулирования положения навесного орудия относительно остова трактора путем регулировки кинематической связи звеньев навесной системы трактора, которые реализуются в устройствах, описанных в патентах: RU 2236978, 2004 г.; RU 2390116, 2010 г. и заявке WO 2009071253.
Их них наиболее близким аналогом (прототипом) изобретения определено решение по патенту RU 2390116 в части реализации способа в почвообрабатывающем агрегате с односторонней навеской рабочего орудия - в данном примере фронтальной - с возможностью смещения мгновенного центра вращения (МЦВ) в продольной вертикальной плоскости агрегата в точку рабочего МЦВ путем изменения кинематической связи звеньев навесного устройства (фиг.6-8 к описанию патента).
В прототипе для смещения исходного МЦВ в точку рабочего МЦВ требуется перенавешивание орудия со сменой одного конкретного навесного устройства на другое, а это значительно усложняет процесс наладки навески по установке точки рабочего МЦВ, не обеспечивает возможности регулировки в зависимости от типов трактора и орудия параметров этого смещения в рамках одного навесного устройства и, значит, требует при реализации способа для разнообразных МТА расширенного диапазона типоразмеров используемых навесных устройств, чем обуславливает их сниженный унификационный уровень.
Задача, решаемая изобретением, направлена на устранение перечисленных недостатков, присущих аналогам.
Технический результат, получаемый от реализации изобретения, состоит в повышении эффективности способа путем его осуществления для МТА с различными типами тракторов: как гусеничными, так и колесными, серийно выпускаемых с навесными устройствами универсальной конструкции и эксплуатируемых без необходимости их доработки или специализации.
Для достижения поставленной цели в способе улучшения тягово-сцепных показателей машинно-тракторного агрегата с навесным почвообрабатывающим орудием за счет обеспечения заданного распределения нагрузки по опорной поверхности трактора путем изменения кинематической связи звеньев навесной системы согласно изобретению используют навесную систему в виде четырехзвенника Чебышева, содержащую нижние и верхние тяги, шарнирно закрепленные одними концами на присоединительной рамке орудия, а другими на тракторе, которая выполнена с возможностью образования в точке пересечения осей верхних и нижних тяг в продольной вертикальной плоскости рабочего мгновенного центра вращения четырехзвенника, смещенного в этой плоскости относительно точки мгновенного центра вращения четырехзвенника, соответствующей сбалансированному состоянию системы (соотношению сил), и характеризующегося образованием момента сил, в зависимости от типа используемого трактора и рациональной технологической схемы распределения нагрузки по его опорной поверхности задают требуемые направление и расстояние упомянутого смещения рабочего мгновенного центра вращения до начала рабочей фазы агрегата, обеспечивая соответствующей регулировкой четырехзвенника заданое смещение, устанавливают требуемую точку рабочего мгновенного центра вращения, после чего в ходе рабочей фазы активизируют силу либо заглубления, либо выглубления орудия относительно установленного рабочего мгновенного центра вращения с возможностью получения регулируемого опрокидывающего вперед или назад момента сил, изменяющих положение Хрез в следующем соотнощении
ΔХрез=±PL/Ррез, где:
ΔХрез - смещение мгновенного центра вращения Р - сила тяги;
L - плечо действия силы тяги;
Ррез - реакция поверхности.
Благодаря предлагаемой совокупности отличительных признаков реализация изобретения коренным образом меняет подход к вопросам балластировки трактора, поскольку меняет принцип балластировки с метода механического навешивания дополнительных грузов на метод изменения кинематики четырехзвенника навесного устройства, что способствует качественному изменению компоновок тракторов, особенно гусеничных; унификации промышленных и сельскохозяйственных и т.п. моделей тракторов; позволяет не просто выравнивать нагрузку на опорных элементах гусеничных ходовых систем, а оптимизировать нагрузки на колеса трактора с учетом распределения веса, давления воздуха в шинах, степени износа протекторов и прочих тому подобных параметров, что значительно повышает эффективность способа по сравнению с предшествующим уровнем техники в этой области.
На приведенном чертеже дана схема реализации способа (пример). Обозначения на чертеже:
- Р - сила тяги;
- Рц - сила основного цилиндра;
- Ркр - сила тяги трактора;
- Ррез - реакция опорной поверхности;
- Ру - вертикальная сосставляющая силы тяги;
- L - плечо действия силы тяги;
- Хц - плечо действия силы основного цилиндра;
- Хрез - плечо реакции опорной поверхности;
- Укр - плечо силы тяги на крюке;
- точка 1 указывает положение центра масс;
- точками А, В, С и D обозначены шарниры четырехзвенника навески, из которых точки А и D являются точками крепления к корпусу трактора;
- верхняя тяга 3 навески, присоединительная рама 4 и нижние тяги 5 образуют механизм с мгновенным центром вращения (МЦВо), лежащим на пересечении линий верхней 3 и нижней 5 тяг и соответствующим сбалансированному соотношению сил в системе;
- к нижней тяге 5 в точке 6 приложена сила Рцк (для варианта колесного трактора) или Рцг (для гусеничного варианта), направленные в противоположные стороны и имитирующие действие основного силового цилиндра навесного устройства;
- 7 и 9 - опорные элементы тракторов (катки либо колеса), причем под номером 7 понимается также ведущее колесо;
- 10 - опорная поверхность;
- 11 - переднее колесо (может быть как ведущим, так и только опорным);
- индексы «к» и «г» рядом с обозначением - соответственно: для колесного трактора и гусеничного трактора.
Сущность изобретения поясняется на примере его реализации в МТА с гусеничным трактором традиционной компоновки и навесным плугом для пахоты, содержащим навесное устройство, соединяющее орудие с трактором, представляющим собой четырехзвенник Чебышева и выполненным с возможностью перестановки точек А и D по вертикали посредством привода 2 с тем, чтобы обеспечить смещение МЦВ в точку рабочего МЦВг.
Внешними силами, действующими на трактор, являются его вес G, реакция опорной поверхности Ррез и сила тяги Р, линия действия которой в принятой исходной настройке навесного устройства совпадает с МЦВо. Сила Рц, будучи внутренней силой, способна оказывать влияние на внешнюю силу тяги Р через заглубление или выглубление плуга, которые могут быть заданы, например, позиционным регулятором. На этом основании сила тяги может быть принята неизменной.
Тогда изменяя в заданном порядке кинематическую связь звеньев навесной системы перестановкой точек А или D, обеспечиваем соответствующие смещения МЦВ, которые, изменяя положение Хрез реакции опорной поверхности Ррез, обуславливают опрокидывающие моменты, определяемые приведенным выше соотношением:
ΔХрез=±PL/Ррез.
Поскольку линия действия результирующей силы тяги Р не меняет своего положения в пространстве, момент от данной силы может в зависимости от смещений МЦВ в одну или другую сторону от нулевого исходного положения активизировать силу самозаглубления плуга или силу его выглубления и создавать регулируемый момент как бы опрокидывающий трактор либо назад (вариант нужный для колесного трактора), либо вперед (вариант нужный для гусеничного трактора или для колесного с колесами одинакового размера): для «опрокидывания» назад активизируется сила самозаглубления, а для «опрокидывания» вперед активизируется сила выглубления.
Таким образом: в варианте колесного трактора произойдет догрузка задних основных ведущих колес, а в гусеничном варианте трактора произойдет выравнивание нагрузки между опорными катками или приближение центра давления к середине опорной поверхности гусеницы. Поэтому силы Рцк и Рцг от основного гидроцилиндра, управляемого позиционным регулятором на приведенной схеме, направлены в противоположные стороны. Разнонаправленность данных сил подчеркивает принципиально разный характер требований к навесным устройствам колесных и гусеничных тракторов, которые до последнего времени практически не учитывались при проектировании тракторов.
Процесс регулирования кинематики навески - положения точек крепления навесного устройства на тракторе - может быть автоматизирован, если, например, предусмотреть возможность изменения длины звеньев 2 в зависимости от сигналов датчиков, реагирующих на вертикальные реакции не менее чем двух опорных катков или колес, расположенных в передней и задней частях ходовой системы.
При равномерном нагружении ходовой системы сигналы упомянутых датчиков будут одинаковыми, а их разность равна нулю. Количество датчиков должно быть оптимальным и достаточным для обеспечения достоверности параметров процеса. При минимальном числе датчиков возможно появление ошибки при наезде на отдельное препятствие, для исключения этого необходимо иметь большее число датчиков. В этом случае счетнорешающим устройством отсеиваются случайные помехи.
Сравнение сигналов датчиков способствует не только возможности выравнивать нагрузку на опорной поверхности гусениц в автоматическом режиме, но и позволяет оптимизировать нагрузки на колеса трактора с учетом распределения веса, давления воздуха в шинах, степени износа протекторов и т.п. эксплуатационных показателей.
Что касается технологической глубины пахоты, то она может быть обеспечена, например, серийными автоматическими регуляторами навесных устройств, из которых, как минимум, может быть применен позиционный регулятор на тракторе, либо опорное колесо на плуге. Тогда у колесного трактора позиционный регулятор будет управлять основным гидроцилиндром навесного устройства, ограничивая заглубление плуга, а у гусеничного - обеспечивать принудительное заглубление при помощи основного гидроцилиндра, аналогично тому, как пахарь воздействует на конный плуг.
К реализации способа приступают после выставления технологической глубины пахоты
Следует отметить, что принудительное заглубление плуга непосредственно связано с работой позиционного регулятора навесного устройства трактора, и вполне вероятно возникновение ситуации, при которой опрокидывающий момент от силы главного цилиндра навесного устройства трактора может оказаться недостаточен для выравнивания нагрузки по опорной поверхности гусеницы. С целью увеличения этого момента целесообразно применить, например, опорное колесо на плуге, которое сможет воспринять дополнительную нагрузку от главного цилиндра или изменить настройку системы, сохраняя глубину, или другие средства. Если при этом установить соответствующий датчик, аналогичный упомянутым выше, на опорном колесе плуга и включить его в общую цепь регулятора, процесс также может быть автоматизирован.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2011 |
|
RU2485742C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2015 |
|
RU2611837C1 |
| МЕХАНИЗМ НАВЕСКИ ТРАКТОРА | 2013 |
|
RU2547769C1 |
| Навесная система трактора | 1974 |
|
SU506340A1 |
| Независимое плавающее прицепное устройство к сельскохозяйственным тракторам | 1959 |
|
SU124729A1 |
| УСТРОЙСТВО ДЛЯ НАВЕШИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ОРУДИЙ НА ТРАКТОР | 1999 |
|
RU2159526C1 |
| МЕХАНИЗМ НАВЕСКИ ТРАКТОРА | 2013 |
|
RU2542761C1 |
| ПОСЕВНОЙ КОМБАЙН | 2010 |
|
RU2430498C1 |
| НАВЕСНАЯ СИСТЕМА | 2013 |
|
RU2551169C2 |
| МЕХАНИЗМ НАВЕСКИ МОДУЛЕЙ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2017 |
|
RU2646078C1 |
Способ включает заданное распределение нагрузки по опорной поверхности трактора путем изменения кинематической связи звеньев навесной системы. Для этого используют навесную систему в виде четырехзвенника Чебышева. Навесная система содержит нижние и верхние тяги, шарнирно закрепленные одними концами на присоединительной рамке орудия, а другими на тракторе. Навесная система выполнена с возможностью образования в точке пересечения осей верхних и нижних тяг в продольной вертикальной плоскости рабочего мгновенного центра вращения четырехзвенника, смещенного в этой плоскости относительно точки мгновенного центра вращения четырехзвенника, соответствующей сбалансированному состоянию системы (соотношению сил), и характеризующегося образованием момента сил. В зависимости от типа используемого трактора и рациональной технологической схемы распределения нагрузки по его опорной поверхности задают требуемые направление и расстояние упомянутого смещения рабочего мгновенного центра вращения до начала рабочей фазы агрегата. Обеспечивая соответствующей регулировкой четырехзвенника заданное смещение, устанавливают требуемую точку рабочего мгновенного центра вращения. После чего в ходе рабочей фазы активизируют силу либо заглубления, либо выглубления орудия относительно установленного рабочего мгновенного центра вращения с возможностью получения регулируемого опрокидывающего вперед или назад момента сил, изменяющих положение Хрез в соотношении ΔХрез=±РL/Ррез, где ΔХрез - смещение мгновенного центра вращения; Р - сила тяги; L - плечо действия силы тяги; Ррез - реакция поверхности. Способ обеспечивает заданное распределение нагрузки по опорной поверхности трактора путем изменения кинематической связи звеньев навесной системы. Способ позволит и улучшить тягово-сцепные показатели МТА с различными типами тракторов: как гусеничными, так и колесными. 1 ил.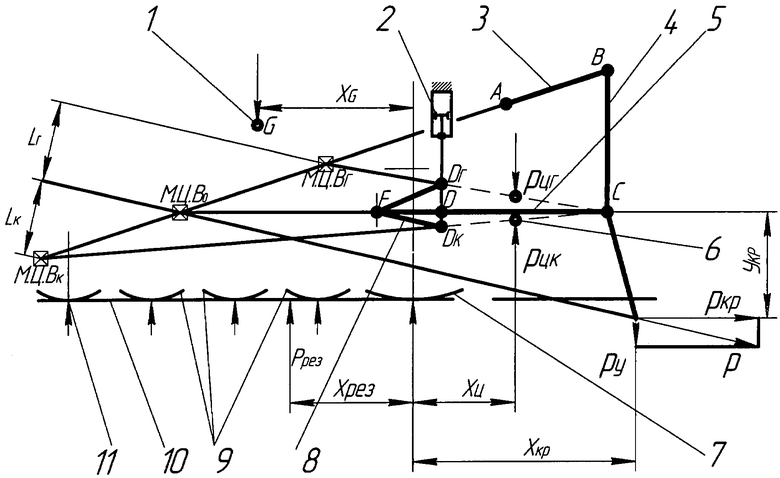
Способ улучшения тягово-сцепных показателей машинно-тракторного агрегата с навесным почвообрабатывающим орудием за счет обеспечения заданного распределения нагрузки по опорной поверхности трактора путем изменения кинематической связи звеньев навесной системы, отличающийся тем, что используют навесную систему в виде четырехзвенника Чебышева, содержащую нижние и верхние тяги, шарнирно закрепленные одними концами на присоединительной рамке орудия, а другими на тракторе, которая выполнена с возможностью образования в точке пересечения осей верхних и нижних тяг в продольной вертикальной плоскости рабочего мгновенного центра вращения четырехзвенника, смещенного в этой плоскости относительно точки мгновенного центра вращения четырехзвенника, соответствующей сбалансированному состоянию системы (соотношению сил), и характеризующегося образованием момента сил; в зависимости от типа используемого трактора и рациональной технологической схемы распределения нагрузки по его опорной поверхности задают требуемые направление и расстояние упомянутого смещения рабочего мгновенного центра вращения до начала рабочей фазы агрегата, обеспечивая соответствующей регулировкой четырехзвенника заданное смещение, устанавливают требуемую точку рабочего мгновенного центра вращения, после чего в ходе рабочей фазы активизируют силу либо заглубления, либо выглубления орудия относительно установленного рабочего мгновенного центра вращения с возможностью получения регулируемого опрокидывающего вперед или назад момента сил, изменяющих положение Хрез в соотношении ΔХрез=±РL/Ррез, где:
ΔХрез - смещение мгновенного центра вращения,
Р - сила тяги,
L - плечо действия силы тяги,
Ррез - реакция поверхности.
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2008 |
|
RU2390116C1 |
| WO 2009071253 А1, 11.06.2009 | |||
| ТРАКТОР | 2007 |
|
RU2340504C1 |
| МЕХАНИЗМ ВЫРАВНИВАНИЯ НАГРУЗКИ ПО ОПОРНОЙ ПОВЕРХНОСТИ ТРАКТОРА | 2002 |
|
RU2236978C2 |

