Устройство относится к медицинской технике (устройства реабилитации), а также к приспособлениям для транспортировки грузов и спортивному инвентарю.
В мире существует огромное число конструкций, имитирующих скелет человека и помогающих ему ходить, переносить тяжести. В основном подобные устройства отличает: ограниченность в движениях, наличие электрической батареи и двигателей с редукторами, большое число шарниров имитирующих суставы и элементов идущих параллельно скелету и связанные с конечностями, датчики движений, электрические контроллеры, программы имитации движений и как результат - сложность конструкции.
Данная конструкция имеет минимальное число шарниров: шарниры обеспечивают 3 степени свободы между конечной точкой, соприкасающейся с землей и «центром вращения экзоноги» - вперед, вбок, вверх (xyz), итого 3 шарнира на экзоногу, не считая вспомогательных. Элементы «экзоног» могут быть не связаны с положением костей ног и позвоночника, не имитируют возможность вертикального кручения бедра, в то же время давая конечной точке (стопе) возможность кручения и наклонов.
Помещение центра вращения экзоног в требуемую точку в теле человека и обеспечение требуемой свободы, может быть осуществлено например с помощью преобразователя центра вращения - Г-образной детали с двумя осями на концах, направленных к точке вращения.
Для обеспечения движения ноги вперед и наклона вбок достаточно одного горизонтально расположенного преобразователя центра вращения.
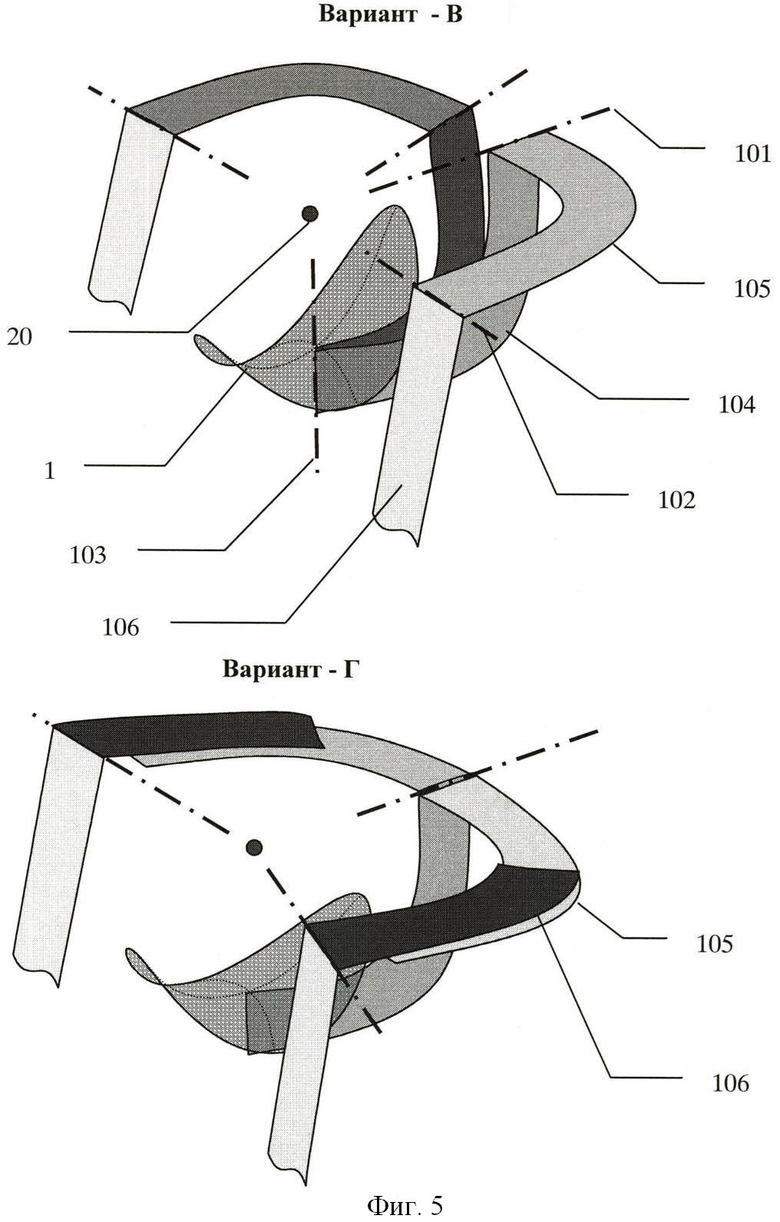
При необходимости можно добавить дополнительную свободу экзоноге - на кручение, используя дополнительные преобразователи центра вращения, расположенные в плоскости симметрии человека (Фиг. 5В) или с помощью направляющей хода, расположенной на горизонтальном преобразователе с имитацией движения по окружности. (Фиг. 5Г).
Основным элементом компенсации веса служит аккумулятор потенциальной энергии (газ или пружина) с силой реакции близким к постоянному и включатель этого аккумулятора - управляемый харповый механизм или клапан гидравлического механизма или фрикционный механизм обратного хода.
Конструкция может быть исполнена с точкой вращения экзоног вне тела человека, тогда более целесообразно использование одного амортизатора на 2 ноги. При таком исполнении последовательность расположения элементов под нагрузкой меняется: с «Земля-подступник-СОХ-амортизатор-шарниры-нагрузка» на «Земля-подступник-СОХ-шарниры-амортизатор-нагрузка».
Особенностью конструкции является возможность изготовления изделия со значительно меньшими нагрузками в осях вращения и шарнирах, а также минимальное количество и простота деталей.
Конструкция позволяет снять вес человека в 3х точках: ступни, паховая область, подмышки.
Амплитуда движения ног и туловища полностью сохраняется.
Эти особенности позволяют использовать конструкцию в огромном спектре применения: медицина - возможность ходить много и полноценно не только престарелым, но даже тем, у кого нет ног, указывая руками, куда наступить, спорт - энергия при прыжке вверх может составить 300%, до двух раз большая скорость при беге за счет большего прыжка. Конструкция может применяться в туризме и прогулках - можно поднимать и долго носить, не уставая большой вес. Облегчается работа, связанная с нагрузками: у грузчиков, садоводов, военных.
Варианты исполнения:
Простой (экзоноги крепятся в паховой области без Г-образных преобразователей).
Базовый (присутствует виртуальная точка вращения «тазобедренного» сустава внутри тела).
Медицинский (возможно управление ног руками, есть подставка от опрокидывания).
Рабочий (один амортизатор на две ноги, центр вращения экзоног вне тела).
Существуют сотни патентов, посвященных конструкциям поддержки и компенсации веса человека при реабилитации, ходьбе, беге, труде.
Упомянуты наиболее схожие.
Известно устройство US 2011040216 (А1), включающее:
пояс на талию, седло, раму, шарниры: тазобедренный, коленный, голеностопный, пассивную пружину колена или двигатель, пружину стопы, устройство компенсации длинны ноги при вращении и прочее.
Общим с данным устройством является: наличие седла, экзоног, возможное отсутствие аккумулятора и двигателей, использование пружин для компенсации веса.
Недостатками этого устройства являются следующие.
1) Неоптимально выбранная точка вращения экзоног, ведущая к усложнению конструкции механизмом удлиняющим ногу. Присутствие нагрузки боковых мышц спины при ходьбе.
2) Нагрузка передается не «напрямую», а через большое число шарниров и соответствующих связей, которые усложняют конструкцию и не дают возможность полностью использовать эффект от стопорного устройства.
3) Подъем и отведение ноги осуществляется с полным усилием, без компенсации.
4) Компенсация наклона туловища вперед отсутствует.
5) Позвоночник не разгружен.
6) Дополнительная пружина стопы с малым ходом.
Эти недостатки исключены в описываемой конструкции за счет:
1, 4) выбора более правильной центра вращения экзоног (предпочтительно в центре туловища, на 25 см выше реального сустава),
2) единого амортизатора экзоноги с минимально-возможным числом степеней свободы расположенным напрямую от точки, контактирующей с землей до «тазобедренного сустава»,
3) пружины подъема ноги наверх,
5) подмышечной поддержки,
6) передачи нагрузки напрямую, к точке контакта с землей.
Известно устройство US 2010113989 (A1) - WALKING ASSISTANCE DEVICE, которое следует считать наиболее схожим устройством, принятым мной за прототип.
Общим с данным устройством является: наличие седла, соединенных с ним через «виртуальные» шарниры экзоног, переносящих нагрузку сразу на область стопы, использование пружин для компенсации веса, две степени свободы «тазобедранного сустава». Особенностью прототипа является наличие двигателя и аккумулятора, а также использование тонких деталей и узлов, так как конструкция находится между ног и не должна мешать ходьбе.
Недостатками прототипа являются следующие.
1) Отсутствие компенсации наклона туловища вперед.
2) Конструктивное исполнение «тазобедренных» шарниров с использованием высоконагруженных направляющих хода не позволяет поднять виртуальную точку вращения выше, без ограничения амплитуды движения ног.
3) Компенсация подъема ноги осуществляется за счет двигателя, а не простой пружины.
4) При вытягивании ноги вперед - нагрузка не компенсирована вообще, только за счет мышц пользователя.
5) Нет возможности (даже геометрической) установки дополнительной свободы «тазобедренного шарнира на кручение ноги.
Эти недостатки решаются в устройстве, содержащем:
седло или подвесной корсет, шарниры "тазобедренных" суставов с 2-3 степенями свободы, в которых точка вращения находится выше и ближе к плоскости симметрии человека, чем естественный сустав; амортизатор с кронштейном-преобразователем, пружину подъема ноги, стопор обратного хода, управляемый через трос стопой, вспомогательные шарниры (крепления и опора амортизатора, крепления пружины подъема ноги). Также дополнительно содержащую: опору на подмышки с осью для свободы поворота позвоночника вбок и направляюще рельсы подмышечных опор для кручения позвоночника, веревки для рук, опору дополнительной устойчивости, ручки управления ногами, крючки для рюкзака, демпфер амортизатора.
Эти недостатки исключены в описываемой конструкции за счет:
1, 2) настраиваемой, расположенной выше, центра вращения экзоног с большой амплитудой работы ноги и корпуса, с использованием простой конструкции «тазобедренных» шарниров,
3, 4) пружины подъема ноги,
5) разделения конструкции рамы на две с общим шарниром, проходящим через вертикальную ось или с помощью округлых направляющих.
Особенностью моей конструкции является: наличие поддержки для разгрузки позвоночника, крюков для рюкзака и приспособления для поднятия и ношения грузов в руках, устройства дополнительной устойчивости, возможность управления ног руками, возможность использовать людям с парализованными нижними конечностями или их отсутствием, более простая конструкция с низкими нагрузками.
Пояснения к рисункам
Фигура 1 - общий схематичный вид устройства. «Базовая» («Медицинская») версия исполнения.
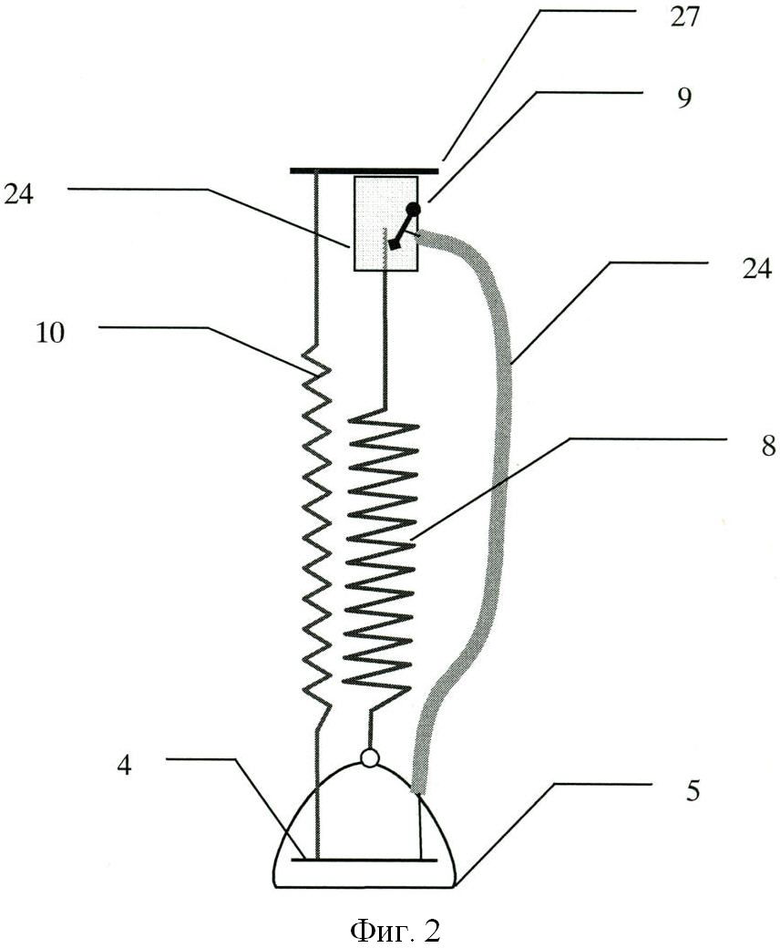
Фигура 2 - схема работы амортизации и стопорного устройства.
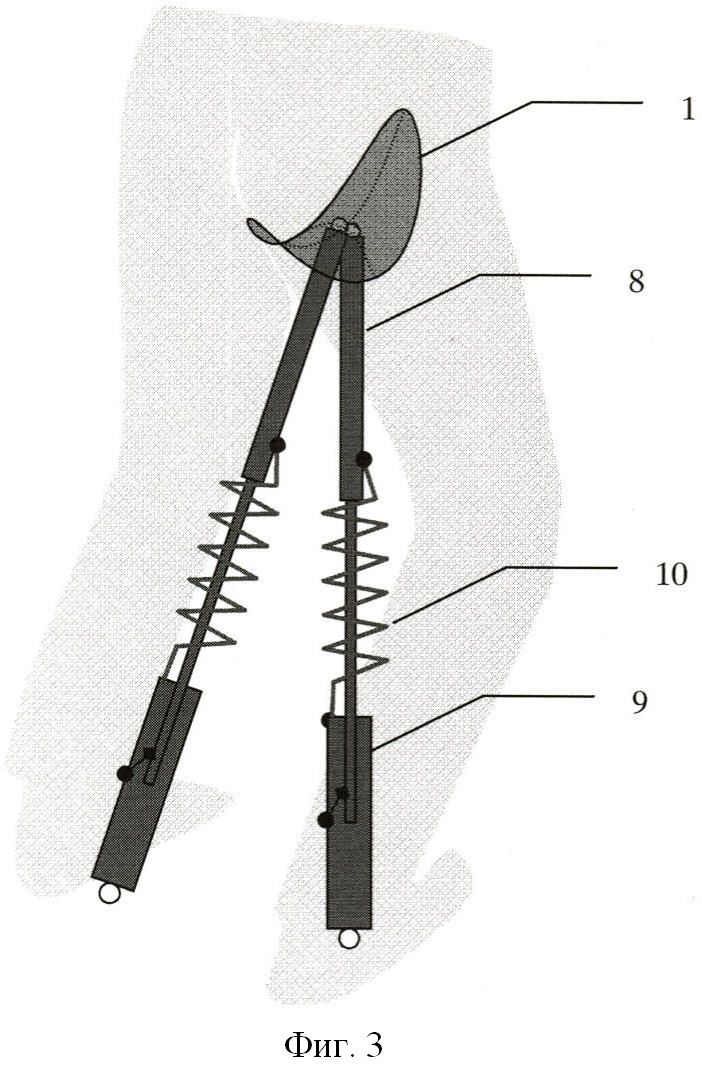
Фигура 3 - «Простая» версия исполнения. Показано различие конструкции от «Базовой»: точка вращения и компоновка элементов амортизатора.
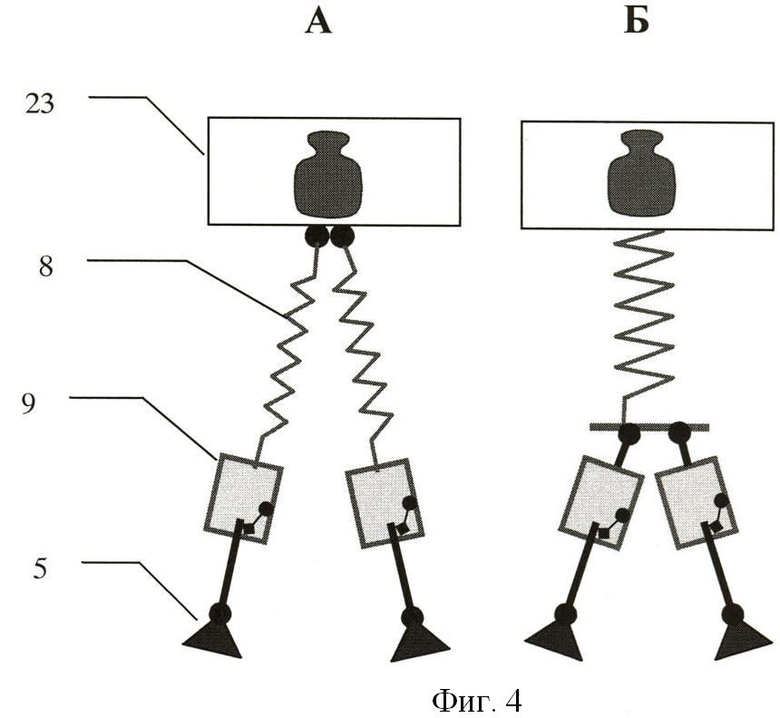
Фигура 4 - Схема последовательности расположения элементов под нагрузкой для двух вариантов исполнения:
A) - два амортизатора на конструкцию - последовательность нагрузки: Земля-подступник-СОХ-амортизатор-шарниры-нагрузка
Б) - один амортизатор на конструкцию. - последовательность нагрузки: Земля-подступник-СОХ-шарниры-амортизатор-нагрузка
Фигура 5 - Схема осуществления 3х степеней свободы для «тазобедренного сустава»:
B) - с помощью двух преобразователей центра вращения
Г) - с помощью дополнительной направляющей - имитации осевого движения
Обозначения на рисунках и иерхия:
(1) седло
(2) рама
(3) 2 основных «тазобедренных» шарнира - переобразователь точки вращения 2 экзоноги в сборе:
(4) подступник (или кнопка)
(5) опора для нижней части экзоноги
(6, 7) рама экзоноги
(8) амортизатор
(9) управляемый Стопор Обратного Хода (СОХ)
(10) пружина подъема ноги
Стойка опоры подмышек в сборе:
(11) основание
(12) рельсы подмышечных опор
(13) 2 мягкие подмышечные опоры
(14) крюки для рюкзака
(15) крюки для груза в руках
Дополнительно на рисунке:
(20) - положение виртуального центра вращения экзоног
(21) - сферический шарнир для стопы
(22) - ось вращения между рамой и стойкой для опоры подмышек
(23) - приложенный вес (человек + багаж)
(24) - трос
(25) - ручки управления ногой
(26) - опора дополнительной устойчивости
(27)- ось отклонения ноги вбок
(28)- ось отклонения ноги вперед
(29) - звено параллелограмма
(30)- угол параллелограмма
101 - оси отклонения ноги вбок
102 - оси наклона ноги вперед
103 - ось кручения ноги
104 - Две части рамы
105 - основная часть направляющей
106 - подвижная часть направляющей
Работа конструкции
Человек сидит в седле (1) и опирается на мягкую опору в подмышках (13). Ступни находятся на подступнике (4). Подступник и опора нижней части экзоноги (5) образуют как бы 2 разных уровня: уровень ступни и уровень земли. Когда нога человека является опорной - разница уровней нулевая и трос блокирует СОХ (9) и весь вес тела приходится на экзоногу (6, 7). Вторая же экзонога имеет незаблокированный СОХ и может свободно подниматься и опускаться, не упираясь в реакцию амортизатора. Пружина подъема ноги (10) компенсирует вес ноги: заставляет амортизатор сжаться при незначительном мышечном усилии. Таким образом нога подымается без усилий. При опускании ноги, сначала земли коснется нижняя опора экзоноги и по мере наступания - будет натягиваться трос управления СОХ этой экзоноги до схватывания амортизатора. К моменту загрузки экзоноги амортизатор получает на себя весь вес. Вторая нога разгружена и готова к поднятию после приподнимания подступника.
Сила реакции амортизатора выбирается чуть меньшей веса человека, с неболыпым ее увеличением, для лучшего контроля подъема-опускания, или в соответствии с требуемой задачей.
Центры вращения экзоног (20) находятся выше тазобедренных суставов. Это позволяет «подпружинить» и наклон тела вперед. Одновременно позволяя использовать при ходьбе режим «более длинные ноги», что смягчает проседания при длинном шаге.
Близкое (совмещенное) расположение центров вращения экзоног позволяет исключить использования боковых мышц спины при переносе веса тела с одной ноги на другой.
Для обеспечения минимальной горизонтальной составляющей силы возвратной пружины при поднятии ноги вперед (с прямым коленом) верх пружины закрепляется как можно выше, например на дуге рельсе под подмышкой (12). Низ пружины соединен с подступником (или с параллелограмным шарниром (30) для лучшей характеристики потенциала поднятия ноги).
Когда человек приседает, он может использовать как один амортизатор так и оба (например для сильного прыжка). Небольшое расслабление в коленях позволяет полностью присесть и также подняться.
Сферический шарнир (21) позволяет крутить и наклонять стопу соответственно рельефу и позиции ноги.
Конструкция может находиться как спереди человека так и сзади. «Колени» также могут быть развернуты в противоположную сторону.
Активация СОХ может происходить и от кнопки, расположенной под опорой экзоноги. Тогда пружина обратного хода может крепиться сразу к опоре, подступник не требуется.
При исполнении конструкции с тремя степенями свободы «тазобедренного» шарнира, экзонога получает возможность кручения, что может быть важно в специфических случаях, например, чтобы немного скрыть конструкцию под одежду.
В «Простом» варианте исполнения, экзоноги крепятся к точке в области паха. Этот вариант может быть дополнен компенсатором, который давит на амортизатор при отклонении ноги в сторону или вперед, от чего центр вращения виртуально перемещается выше, в более эффективную зону.
Компенсатор по сути представляет собой дополнительный рычаг, шарнирно связанный с рамой конструкции. Амортизатор крепится к этому рычагу верхним концом.
Основание опоры подмышек имеет совместно с рамой конструкции горизонтальную ось (22), для обеспечения наклонов тела вбок. рельсы подмышечных опор (12) дают возможность кручения позвоночника.
На рельсах могут быть закреплены крючки для рюкзака (14) или веревки с крючками для ношения грузов «в руках» (15).
Седло может иметь вертикальную дополнительную свободу относительно рамы, для обеспечения оптимального распределения веса, например в виде вертикальной оси проходящей через его центр.
«Медицинский» вариант конструкции может быть дополнен устройством дополнительной устойчивости и ручками управления ногами.
«Рабочий» вариант наиболее целесообразен с точкой вращения, расположенной значительно выше бедер, например над головой. Это дает минимальную просадку центра тяжести при передвижении с грузом. Фактически человек подвешивается к высокорасположенной точке общего шарнира экзоног и подвеса.
Устройство от дополнительной устойчивости представляет собой дополнительную выдвигающуюся конструкцию (26) на экзоноге, нижний конец которой позволяет опереться на нее, получив устойчивое равновесие на 4 точках.
Ручки управления (25) крепятся на экзоногу (в вершине параллелограмма (30)). Двигая рукой вверх пользователь легко подымет всю ногу. Аналогичны движения вбок и вперед. То есть даже при полной парализации нижней части тела или отсутствии ног, есть возможность без значительных усилий динамично работать ногами, выбирая правильно опору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экзоскелет | 2021 |
|
RU2760527C1 |
| ЭКЗОСКЕЛЕТ | 2017 |
|
RU2681115C2 |
| СПОСОБ ОЗДОРОВЛЕНИЯ И РАЗВИТИЯ ФИЗИЧЕСКИХ СПОСОБНОСТЕЙ ВЕЛОСИПЕДИСТОВ | 2015 |
|
RU2638684C2 |
| Приспособление для облегчения ходьбы с применением каркаса из высокоуглеродистого пластика | 2018 |
|
RU2712576C2 |
| СПОСОБ ОЗДОРОВИТЕЛЬНОЙ ГИМНАСТИКИ "ХОД" | 2013 |
|
RU2528632C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ И ЛЕЧЕНИЯ НАРУШЕНИЙ ФУНКЦИИ И ДЕФОРМАЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2222307C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| СПОСОБ КОНСЕРВАТИВНОГО ЛЕЧЕНИЯ ОРТОПЕДИЧЕСКОЙ ПАТОЛОГИИ | 2009 |
|
RU2401088C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПОСЛЕ ОПЕРАЦИИ НА ТАЗОБЕДРЕННЫЙ СУСТАВ | 2023 |
|
RU2816046C1 |
Изобретение относится к медицинской технике и может быть использовано для реабилитации инвалидов и в быту. Конструкция компенсации веса человека при ходьбе и беге содержит седло, соединенную с ним раму, тазобедренные шарниры экзоног, экзоноги, накопитель упругой энергии, шарниры, обеспечивающие стопе и связанной с ней опоре экзоноги наклоны и кручение. Для каждой экзоноги имеются стопоры обратного хода, подступник, обеспечивающий управление подъемом ноги, пружины возврата ноги вверх, тазобедренные шарниры экзоног с двумя или тремя степенями свободы. Накопитель упругой энергии используют в качестве основного элемента, компенсирующего подъем и опускание центра тяжести пользователя и его груза, который обеспечивает упругую силу между точкой около стопы, ближе к мыску, и центром вращения экзоног, расположенным либо в паховой области, либо выше тазобедренных суставов. В результате конструкция облегчает движения человека, преимущественно при ходьбе и беге, снимает нагрузку с позвоночника и суставов ног, позволяет без дополнительных усилий перемещать тяжести, совершать высокие прыжки. 15 з.п. ф-лы, 5 ил.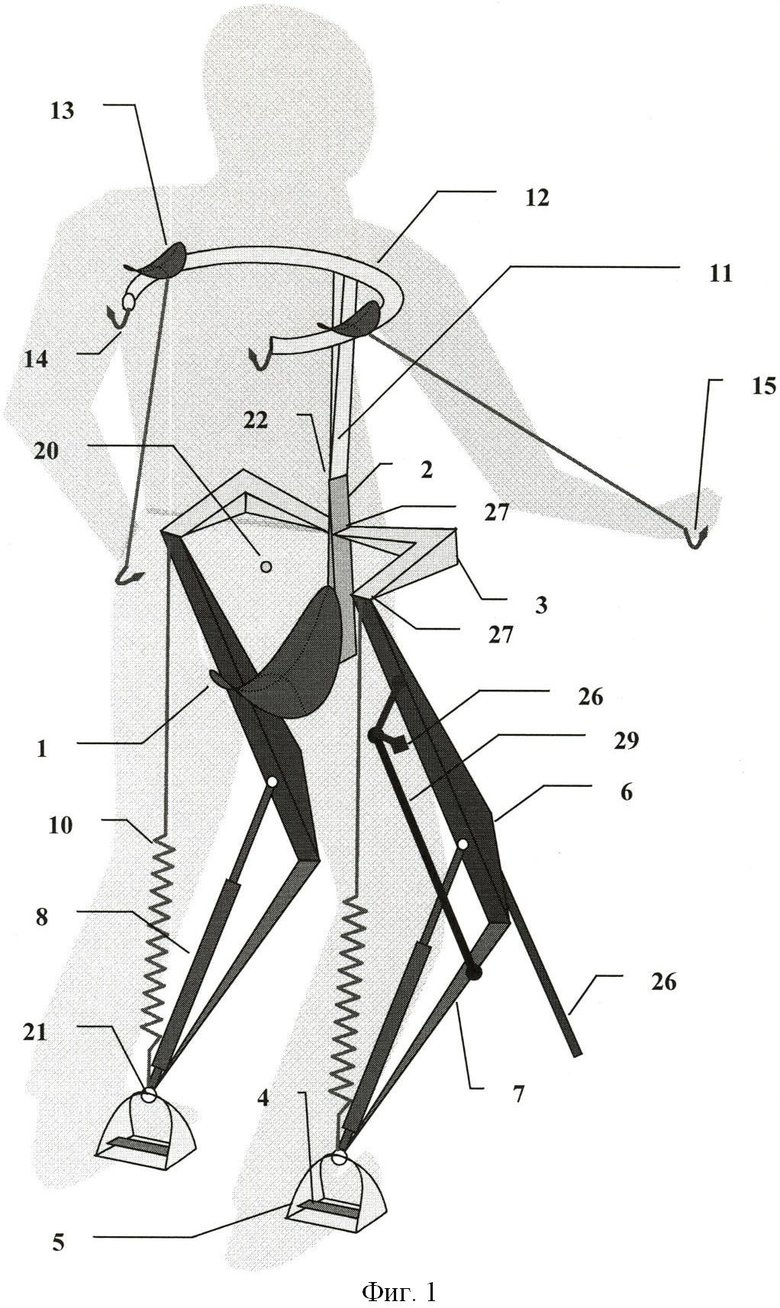
1. Конструкция компенсации веса человека при ходьбе и беге. содержащая седло, соединенную с ним раму, тазобедренные шарниры экзоног, экзоноги, накопитель упругой энергии, шарниры, обеспечивающие стопе и связанной с ней опоре экзоноги - наклоны и кручение, отличающееся тем, что содержит для каждой экзоноги стопоры обратного хода, подступник, обеспечивающий управление подъемом ноги, пружины возврата ноги вверх, тазобедренные шарниры экзоног, с двумя или тремя степенями свободы, при этом накопитель упругой энергии используют в качестве основного элемента, компенсирующего подъем и опускание центра тяжести пользователя и его груза, который обеспечивает упругую силу между точкой около стопы, ближе к мыску, и центром вращения экзоног, расположенным либо в паховой области, либо выше тазобедренных суставов.
2. Конструкция по п.1, содержащая накопитель упругой энергии, используемый в качестве основного элемента компенсирующего подъем и опускание центра тяжести пользователя и его груза, обеспечивающие упругую силу между точкой около стопы, ближе к мыску, и центром вращения экзоноги.
3. Конструкция по п.2, содержащая стопор обратного хода ноги, управляемый смещением ноги или руки человека, дающий возможность снять нагрузку с амортизатора при подъеме ноги.
4. Конструкция по п.3, содержащая пружину, компенсирующую вес ноги для поднятия ее центра тяжести вверх.
5. Конструкция по п.4, дополнительно содержащая шарнир наклона спины в стороны, расположенный на раме, стойку опоры подмышек с дугами-рельсами и расположенными па рельсах подмышечными опорами для кручения позвоночника.
6. Конструкция по п.5, дополнительно содержащая настраиваемый демпфер амортизатора.
7. Конструкция по п.6, дополнительно содержащая ручки управления ногами и выдвигающуюся опору от падения, расположенные на каждой экзоноге.
8. Конструкция по п.7, накопитель упругой энергии которой исполнен в виде двух амортизаторов, расположенных на каждой экзоноге.
9. Конструкция по п.8, выполненная с последовательностью силовых элементов, между землей и нагрузкой на основу конструкции: опора амортизатора-СОХ-амортизатор-тазобедренные шарниры-основа.
10. Конструкция по п.9, содержащая тазобедренные шарниры экзоног, выполненные с центром вращения, расположенным выше тазобедренного сустава человека и ближе к плоскости симметрии человека.
11. Конструкция по п.10, содержащая для каждой экзоноги основной преобразователь центра вращения, расположенный горизонтально, дополнительный преобразователь центра вращения, расположенный в плоскости симметрии человека, или дополнительную направляющую, с имитацией кручения вокруг вертикальной оси.
12. Конструкция по п.9, содержащая тазобедренные шарниры экзоног с центром крепления, расположенным в паховой области человека, и центром вращения в той же точке.
13. Конструкция по п.12, отличающаяся тем, что центр вращения экзоног смещены в точку, расположенную выше тазобедренного сустава человека и ближе к плоскости симметрии человека, за счет дополнительного компенсатора распрямления экзоноги, функция которого давать коррекцию при отклонении ноги вперед и в стороны.
14. Конструкция по п.7, выполненная с последовательностью силовых элементов, между землей и нагрузкой на основу конструкции: опора экзоноги-СОХ-тазобедренные шарниры-накопитель упругой энергии-основа.
15. Конструкция по п.14, отличающаяся тем, что накопитель упругой энергии которой исполнен в виде одного общего амортизатора, расположенного между совместным центром вращения экзоног и центром тяжести.
16. Конструкция по п.15, отличающаяся тем, что опора на паховую и прилегающие области выполнена в виде корсета.
| УСТРОЙСТВО ДЛЯ ПРИЖИМА МАГНИТНОЙ ЛЕНТЫ | 1989 |
|
RU2036518C1 |
| ЕР 2055287 А1, 06.05.2009 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| CN 201524216 U, 14.07.2010 | |||
| УНИВЕРСАЛЬНЫЙ ТРЕНАЖЕР ДЛЯ МЕДИКО-СОЦИАЛЬНОЙ РЕАБИЛИТАЦИИ | 1996 |
|
RU2100995C1 |
| Устройство для имитации ходьбы и бега | 1991 |
|
SU1831347A3 |

