Изобретение относится к лечебной физкультуре и может быть использовано в общеукрепляющих целях при проведении занятий лечебной физкультуры, а также при специальной подготовке спортсменов, различных контингентов больных и здоровых людей.
Известен способ оздоровления организма, предусматривающий сочетание комплекса упражнений йога с симптоматическим лечением, приемом горячих ванн, а также с приемом биостимулирующей смеси, включающей сок алоэ, сок клюквы и мед (см., например, патент РФ №1831336, А61Н 33/00, 1993 г.).
Известный способ используется при профилактике и лечении хронических корешковых синдромов. Однако данный способ является узконаправленным, поскольку он пригоден для определенных лиц с определенным заболеванием.
Известен способ оздоровительной гимнастики, включающий подготовительные упражнения и серии изменений положения позвоночника с последовательным увеличением нагрузки на мышцы, включающие движения на растягивание и скручивание (см., например, патент РФ №2266093, A61H 1/00, 2004 г.).
Известный способ обеспечивает улучшение осанки, однако он сложен в освоении.
Наиболее близким по технической сущности и по совокупности совпадающих по большему числу признаков с заявленным способом является способ оздоровительной гимнастики, включающий комплекс гимнастических упражнений с использованием тренажеров в виде палок (см., например, патент РФ №2383325, А61Н 1/00, 2010 г.).
Организация работы в известном способе приводит к скованности и неполной проработки объемов движений рычагов в суставах, в частности работы рычага плеча и всего тазобедренного комплекса (таза и ног) при естественных перемещениях, движение происходит поэтапно, движения рук не скоординированы с движением ног и не учитывается вложение инерции массы тела.
Техническая задача, на решение которой направлен заявляемый способ оздоровительной гимнастики с указанием обеспечиваемого технического результата, является оздоровительный эффект организма при естественном движении человека путем управления координированными движениями всех рычагов опорно-двигательного аппарата, как единой функциональной системы, с учетом индивидуальной антропометрии каждого человека, и при комплексном сочетании движения с волей (намерением), мыслью (представлением) и чувством (ощущением).
Изобретение, по мнению заявителя, является новым и носит изобретательский уровень, так как на дату подачи заявки неизвестна представленная совокупность всех действий на материальный объект - человека и порядок выполнения этих действий. Предлагаемый способ оздоровительной гимнастики широко апробирован.
Таким образом, предложение заявителя соответствует всем условиям изобретения.
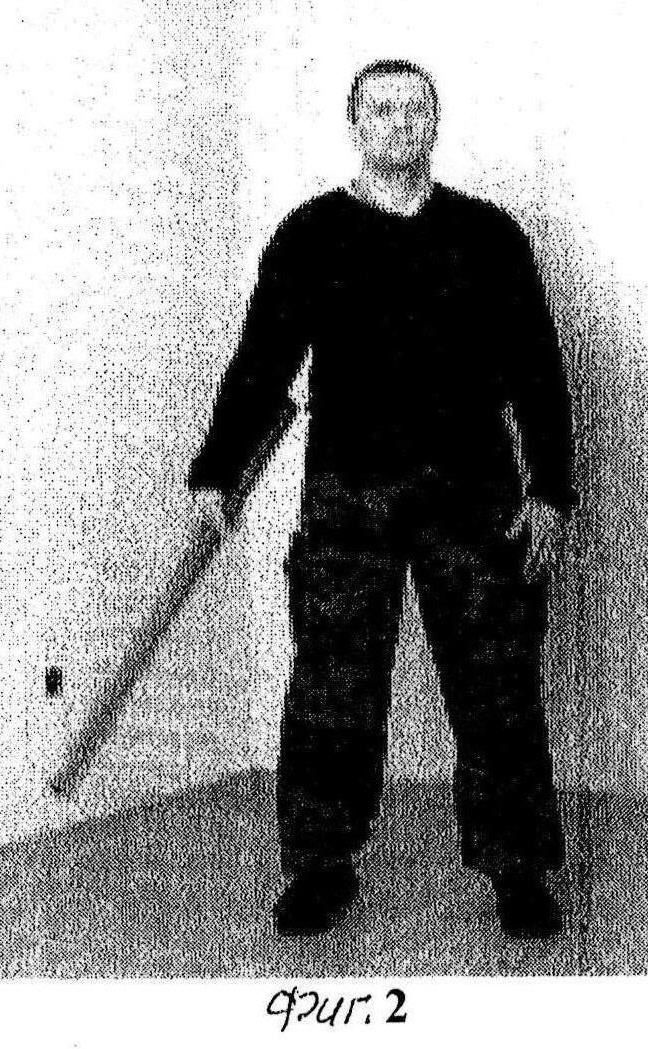
Технический результат достигается тем, что способ оздоровительной гимнастики, включающий выполнение упражнений с использованием гимнастической палки или палок, согласно изобретению выполнение упражнений начинают из устойчивой маневренной позиции (УМП): ноги на ширине плеч, колени слегка согнуты, стопы параллельны, ноги пружинят, упор осуществляют на всю площадь стоп, корпус прямой, взгляд вперед, живот и ягодицы подтянуты, кистью обхватывают палку, или в обеих кистях держат по палке, выполняют упражнения, включающие динамически устойчивые движения по замкнутым криволинейным траекториям - «восьмеркам», основанным на центростремительных ускорениях к оси позвоночника внутри проекции площади тела; при этом каждое движение представляет собой системное пространственно-временное взаимодействие трех управляемых осевых противовесов опорно-двигательного аппарата: центральная ось-опора - позвоночник, ведущий нижний осевой противовес - тазобедренный комплекс, включающий таз и рычаги обеих нижних конечностей, зависимый верхний осевой противовес - комплекс плечевого пояса и рычаги верхних конечностей, причем это взаимодействие осуществляют в виде четырех типов взаимодействия осевых противовесов относительно общей вертикальной оси - позвоночника: взаимодействие «скручиванием», «поворотом», встречное взаимодействие «складывание» и раскачивание - «качели», при этом при «скручивании» противовесы совершают горизонтальные встречные или скрестные колебания относительно позвоночника, при взаимодействии «поворотом» противовесы осуществляют сонаправленное или однонаправленное перемещение одноименных крайних точек плеч и таза; при типе взаимодействия «складывание» проводят сгибание позвоночного столба вперед, вправо и влево, прогиб назад, при этом осуществляют движение рычага таза навстречу рычагу плеч: при типе взаимодействие «качели» движения плеч и таза осуществляют в противоположных направлениях вперед-назад, вправо-влево, уравновешивая при этом друг друга.
На чертежах представлена последовательность движений оздоровительной гимнастики.
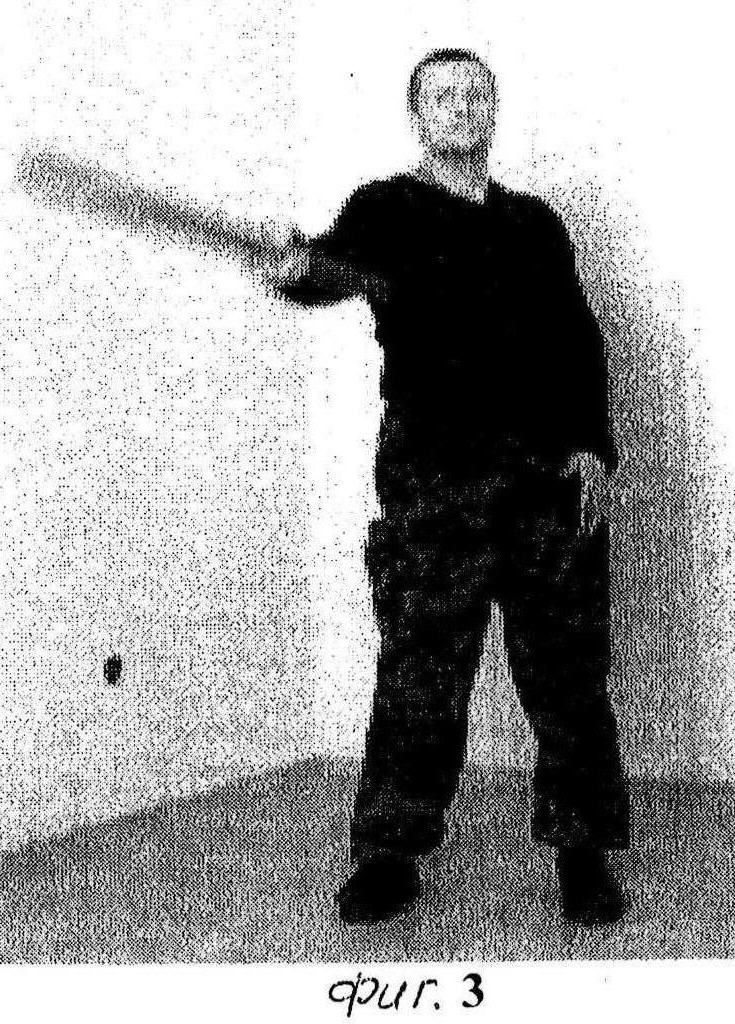
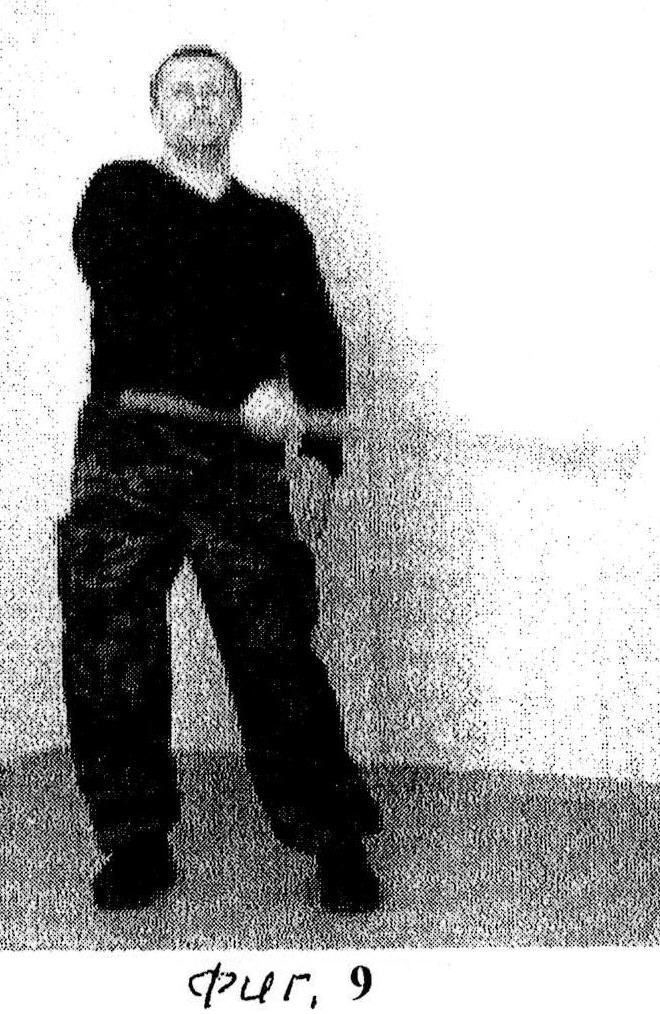
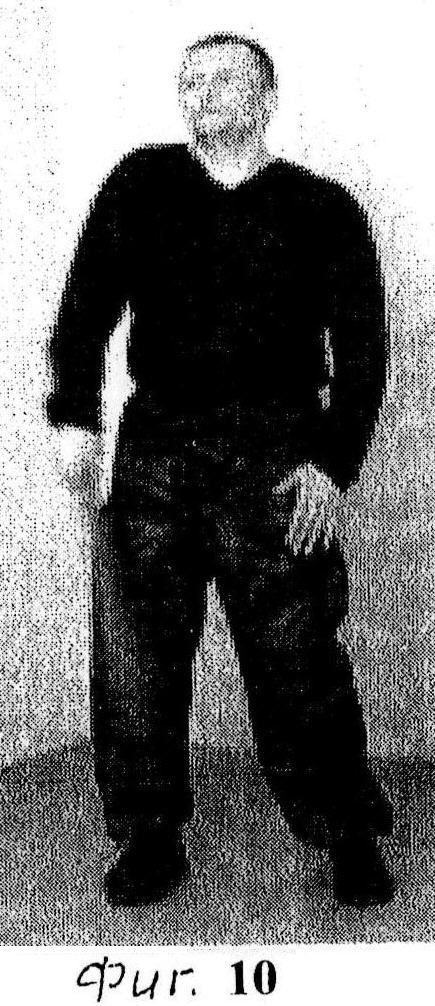
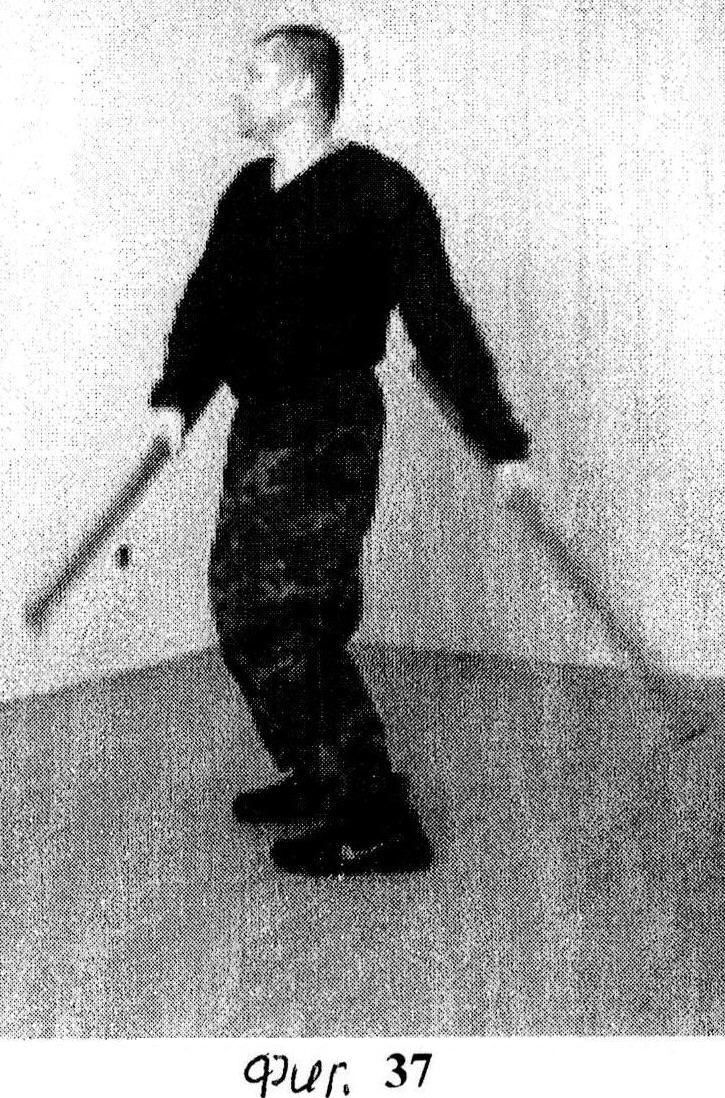
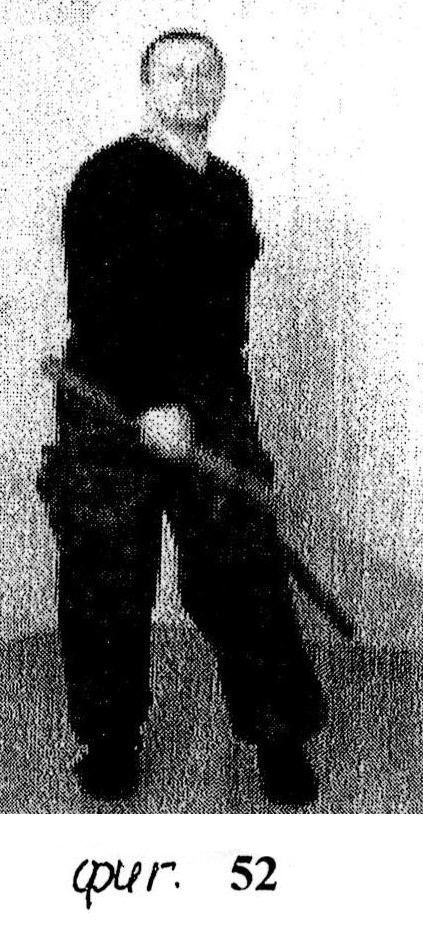
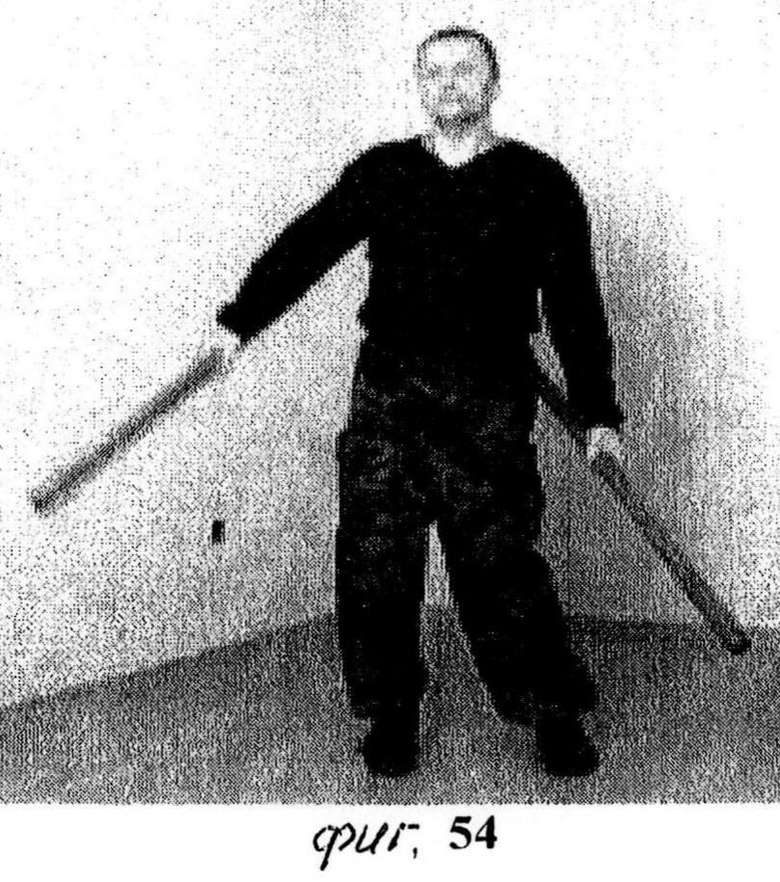
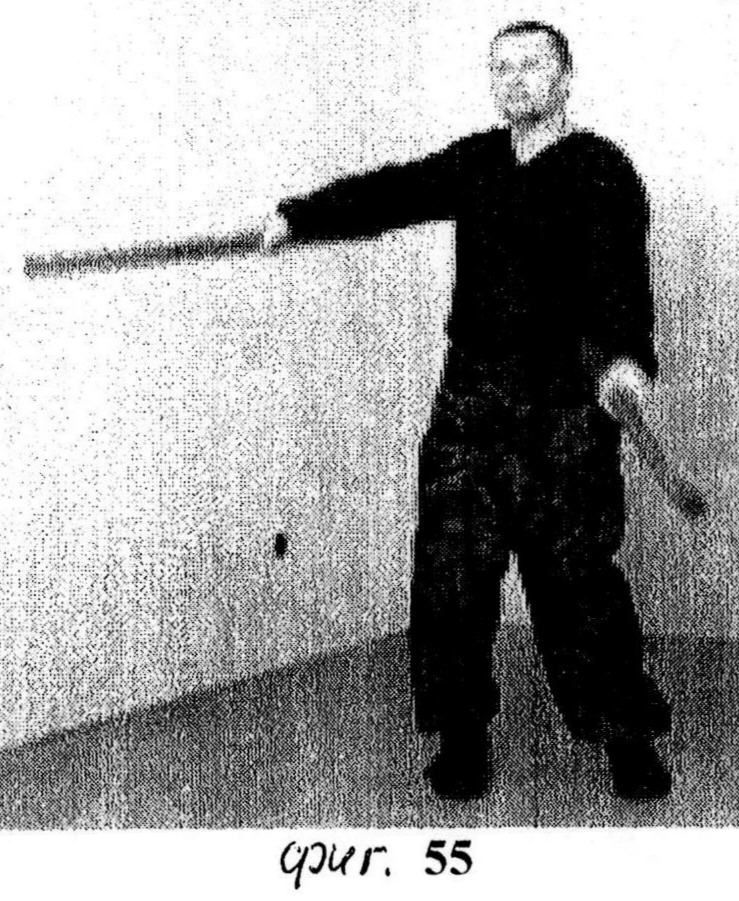
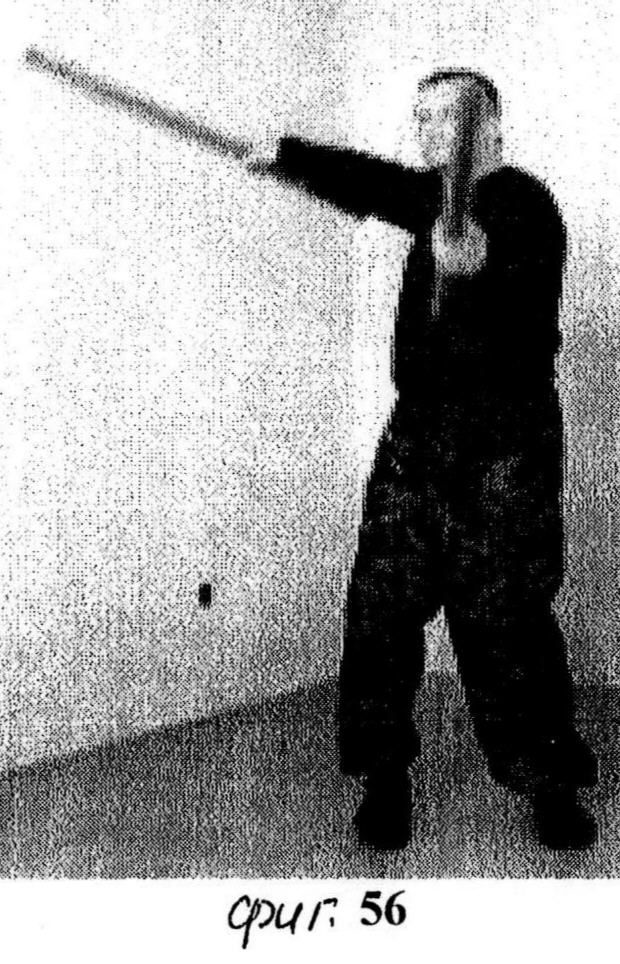
На фиг.1-21 представлена последовательность движений с одной палкой в 21 позициях фронтальной проекции.
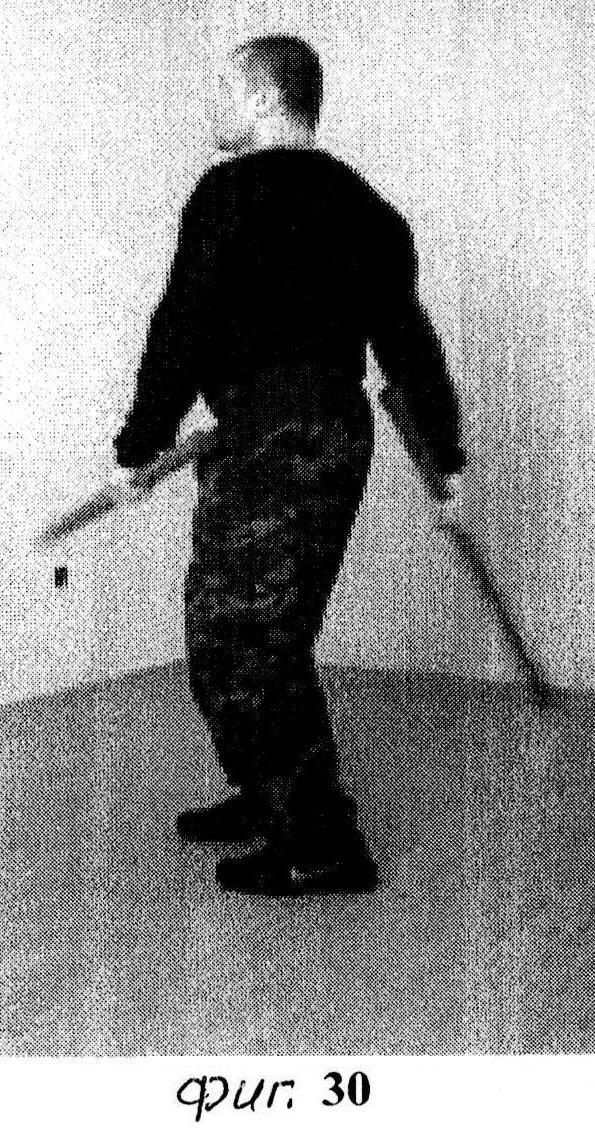
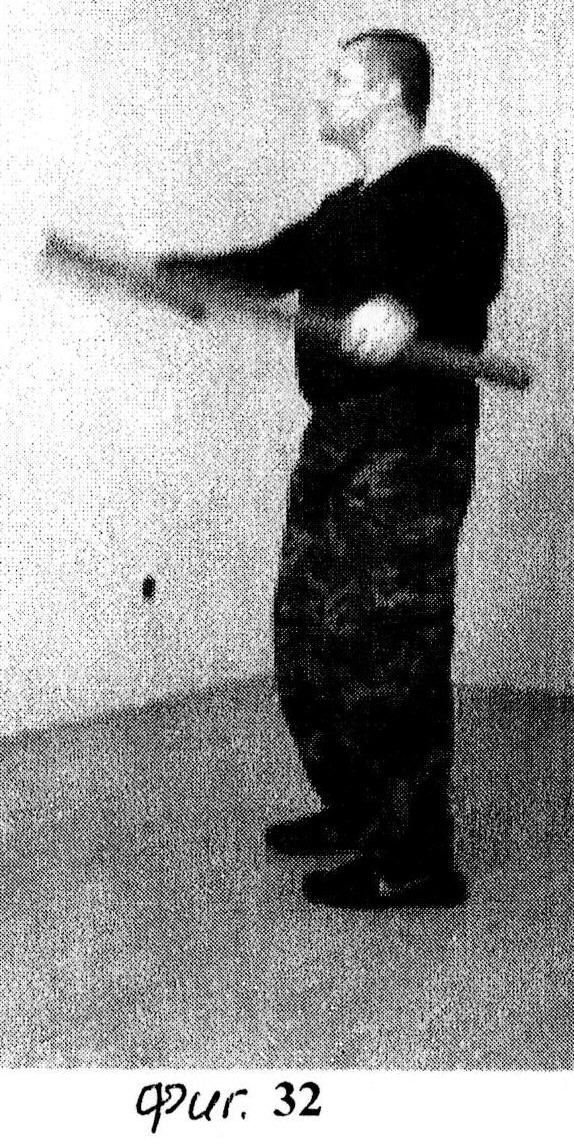
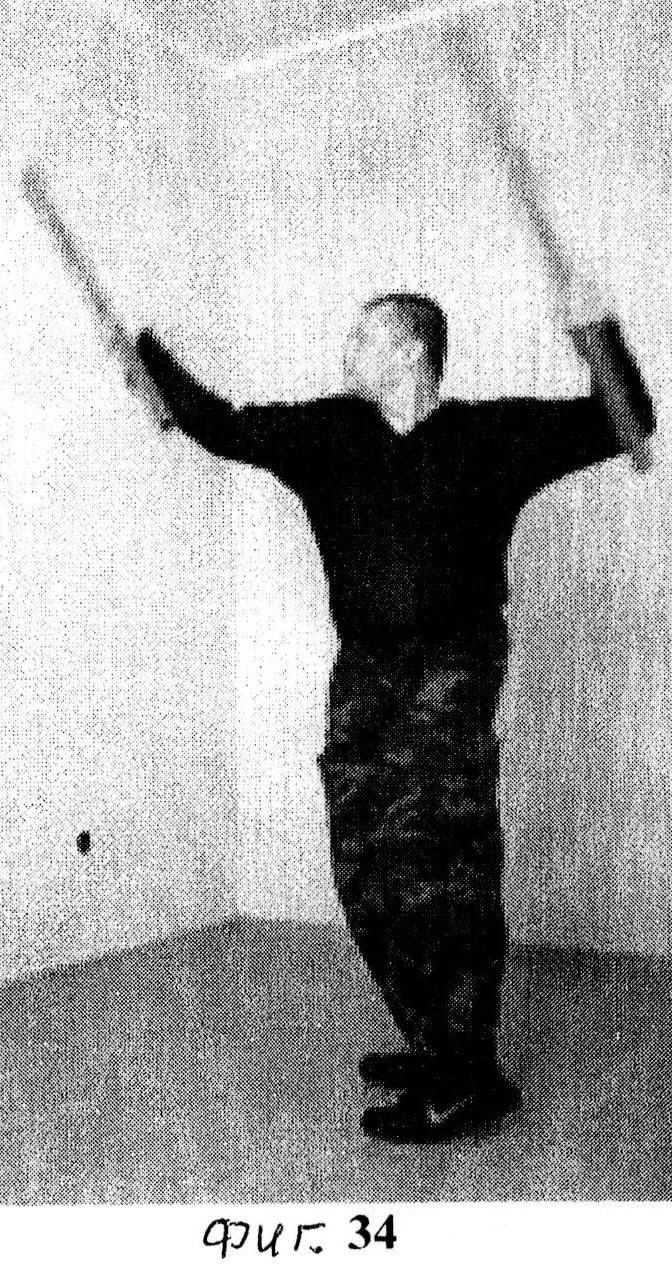
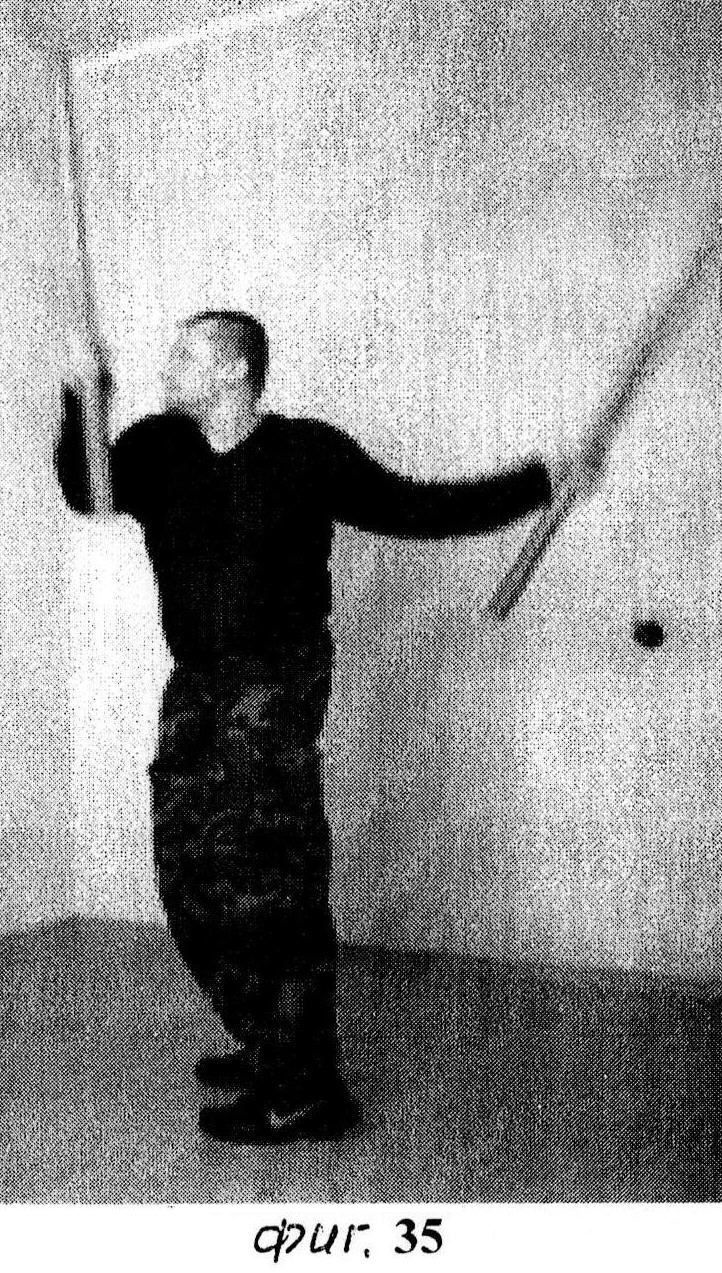
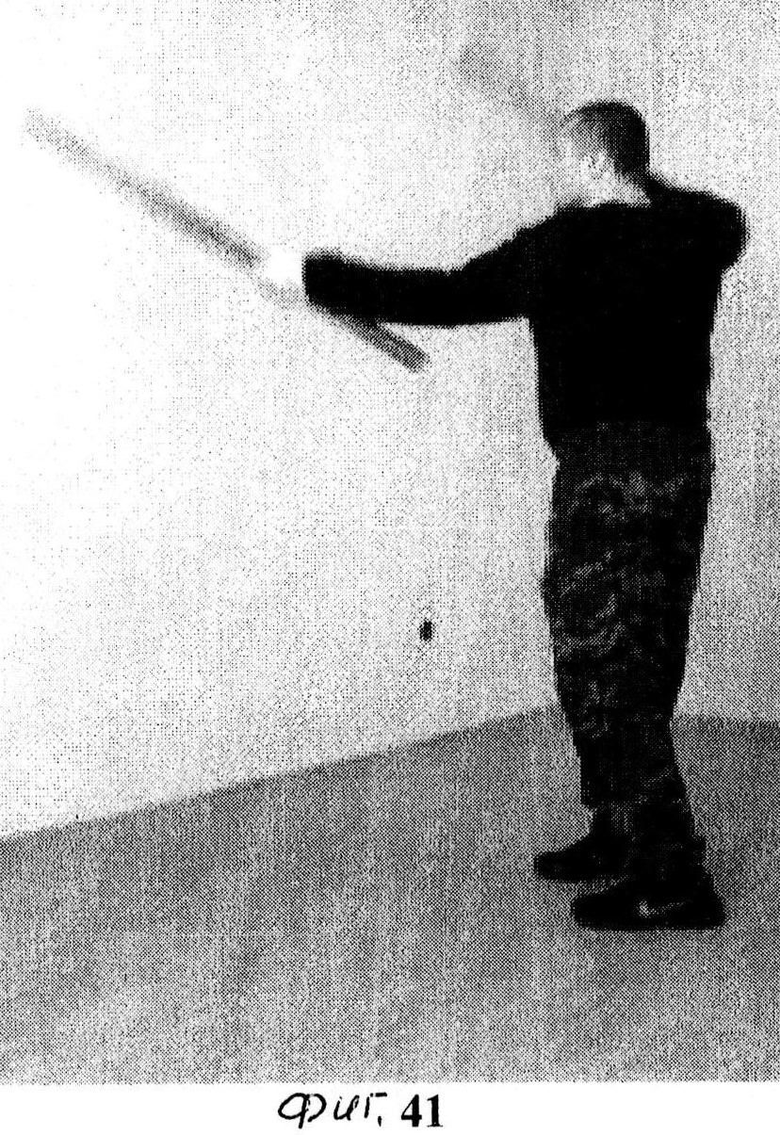
На фиг.22-42 представлена последовательность движений с двумя палками в 21 позициях боковой проекции.
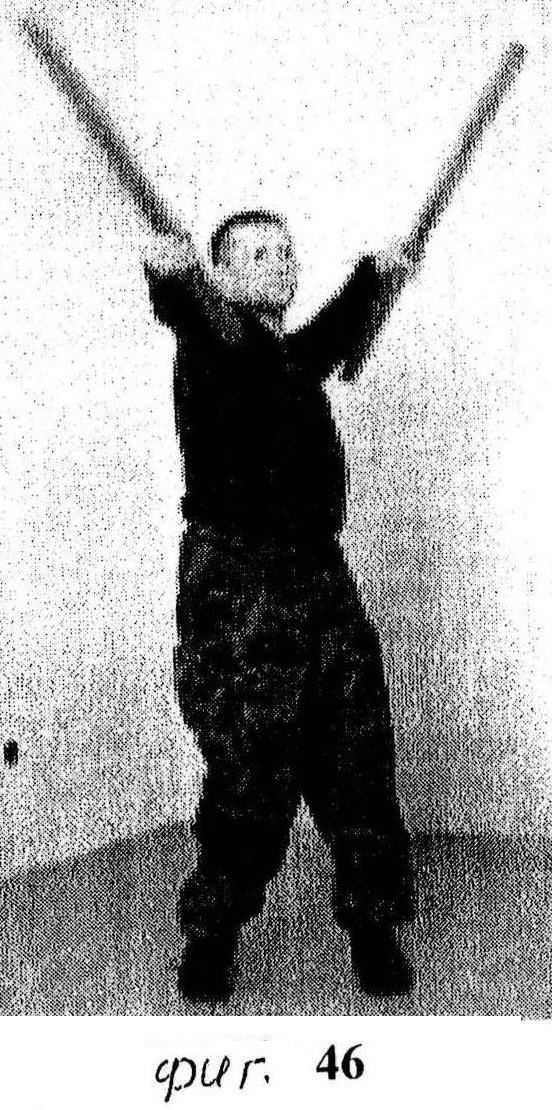
На фиг.43-72 - то же, в 30 позициях фронтальной проекции.
На фиг.73-93 - то же, в 21 позициях, вид сзади.
Рассмотрим основные упражнения, лежащие в основе оздоровительной гимнастики.
Пример выполнения конкретного комплекса упражнений, в котором реализован заявляемый способ оздоровительной гимнастики.
Каждое движение в оздоровительной гимнастике представляет собой системное пространственно-временное взаимодействие трех управляемых осевых противовесов. Такое движение можно назвать хронотопным организованным движением (ХОД), «хронотоп» по А.А. Ухтомскому означает - комплекс пространственно-временных отношений предметов и явлений, а организованное движение, в данном случае, - это согласованное, упорядоченное, скоординированное движение всех частей опорно-двигательного аппарата как единой функциональной системы.
В гимнастике ХОД опорно-двигательный аппарат рассматривается как система управляемых осевых противовесов, которая состоит из трех основных отделов:
- Центральная ось-опора (ЦО) - позвоночник, которая является главным связующим элементом системы противовесов, ее динамической опорой;
- Ведущий (нижний) осевой противовес - тазобедренный комплекс (ТБК), что представляет таз и рычаги обеих нижних конечностей;
- Зависимый (верхний) осевой противовес - комплекс плечевого комплекса (КПП), что представляет плечевой пояс (совокупность лопатки, ключицы, грудной клетки и плечевого сустава, рычаги верхних конечностей). Совокупность основных элементов является структурой, представляющей собой единство закономерно расположенных и функционирующих частей - опорно-двигательный аппарат.
Упражнения начинают из устойчивой маневренной позиции (УМП): ноги на ширине плеч, колени слегка согнуты, стопы параллельны, ноги пружинят, упор осуществляют на всю площадь стоп, корпус прямой, взгляд вперед, живот и ягодицы подтянуты, кистью обхватывают палку, или в обеих кистях держат по палке, выполняют упражнения, включающие динамически устойчивые движения по замкнутым криволинейным траекториям - «восьмеркам», основанным на центростремительных ускорениях к оси позвоночника внутри проекции площади тела. Каждое движение представляет собой системное пространственно-временное взаимодействие трех управляемых осевых противовесов опорно-двигательного аппарата: позвоночник, тазобедренный комплекс, комплекс плечевого пояса и рычаги верхних конечностей.
Движение начинается сразу всем телом от стоп. Посыл идет от таза и ног при активной работе голеностопа, ТБК движется по траектории «восьмерка вперед», таз и ноги двигаются по диагонали вперед справа налево, с небольшим выпрямлением вверх. Происходит небольшое вкручивание левой стопы с отрывом и поворотом пятки внутрь и упором на переднюю часть стопы, вес распределен равномерно между двумя опорами ног. Корпус плавно поворачивается влево с центром вращения в позвоночнике, одновременно правая рука начинает рисовать дугу восьмерки по диагонали снизу вверх, поднимаясь с поворотом относительно с продольной оси предплечья наружу (супинация), плечевой сустав прижимается к груди за счет работы рычага ключицы, при этом левая рука (плечевой сустав) симметрично делает круговое движение по дуге снизу вверх с прижиманием рычага лопатки к позвоночнику. Далее таз и ноги, рисуя дугу восьмерки, доходят до границы амплитуды левого тазобедренного сустава, прокатываясь по нему справа налево выходят по диагонали восьмерки, с понижением центра тяжести (ц.т.) за счет амортизационных функций в суставах ног и таза. Рука вместе с палкой продолжает движение по дуге сверху вниз, пересекая осевую линию позвоночника спереди и разворачиваясь внутрь относительно продольной оси предплечья (пронация). Смещение таза и ног с крайнего левого положения происходит по диагонали вперед-вправо в крайнее правое положение с движением ц.т. вверх с распрямлением в суставах коленей. Происходит небольшое вкручивание правой стопы с отрывом и поворотом пятки внутрь упором на переднюю часть стопы, вес распределен равномерно между двумя опорами ног.
Корпус начинает разворачиваться вправо вместе с правой рукой и палкой. Движение палки происходит по диагонали снизу вверх (пронация). Таз и ноги, рисуя дугу восьмерки, доходят до границы амплитуды правого тазобедренного сустава, прокатываясь по нему слева направо, выходят на диагональ восьмерки с понижением центра тяжести (ц.т.) за счет амортизационных функций в суставах ног и таза. Рука вместе с палкой продолжает движение по дуге восьмерки снизу вверх и сверху вниз, пересекая осевую линию позвоночника сзади и разворачиваясь наружу относительной продольной оси предплечья (супинация). Плечевой сустав и рычаг лопатки правой руки начинают прижиматься к позвоночнику симметрично движению правой руки, левая рука (плечевой сустав) также движется по окружности и прижимается плечом к груди (центростремительные ускорения). С этого момента начинается полный цикл движения, происходит прокатывание по стопе правой ноги с ее полной постановкой на опору с выходом таза по диагонали «восьмерки вперед» справа налево. Таз и ноги двигаются по диагонали вперед справа налево с небольшим выпрямлением вверх. Происходит небольшое вкручивание левой стопы с отрывом и поворотом пятки внутрь и упором на переднюю часть стопы, вес распределен равномерно между двумя опорами ног. Корпус плавно поворачивается вправо с центром вращения в позвоночнике, одновременно правая рука начинает рисовать восьмерки по диагонали снизу вверх, поднимаясь с поворотом относительно продольной оси предплечья наружу (супинация). Плечевой сустав прижимается к груди за счет работы рычага ключицы, при этом левая рука (плечевой сустав) симметрично делает круговое движение по дуге снизу-вверх с прижиманием рычага лопатки к позвоночнику. Упражнения с одной палкой в дальнейшем расширяется в работу с двух рук, где сложно-координационные фигуры позволяют работать каждой рукой независимо от другой, при согласовании правой и левой стороны тела.
Выполнение фигуры с двумя палками полностью аналогично описанной фигуры с одной палкой. Момент работы сводится к синхронному движению правой и левой руки при разведении рук с углом в 180 градусов. Происходит одновременное движение траекторий рук по окружности восьмерки, обе руки поднимаются по дуге снизу вверх против часовой стрелки при повороте корпуса налево и обе руки поднимаются по дуге снизу вверх по часовой стрелки при повороте корпуса направо и спереди и сзади окружности восьмерки пересекают осевую линию позвоночника. Целесообразно использовать дополнительный прием - это подключение конуса вращения рычага предплечья (закрывание и раскрывание локтя) при повороте корпуса влево, правая передняя рука делает вращение предплечьем против часовой стрелки (закрывание, сгибание в локте), а левая задняя по часовой стрелки (раскрывание, распрямление в локте). Каждое движение необходимо прорабатывать как для правой, так и для левой руки в разных режимах работ - движение таза на «восьмерках вперед» и «восьмерках назад», в медленном и быстром темпе, плавном и рваном темпе. Процесс согласования активности мышц тела и рычагов опорно-двигательного аппарата направлены на успешное выполнение двигательной задачи. В сформированном динамически устойчивом движении происходит автоматическое уравновешивание всех инерционных движений без продуцирования особых импульсов для коррекции, движения выполняются легко без видимых усилий.
В гимнастике ХОД различают четыре типа взаимодействия осевых противовесов посредством позвоночника: взаимодействие «скручиванием» (противоход), взаимодействие «поворотом» (сонаправленное), встречное взаимодействие «складывание» и «качели» (раскачивание).
При типе взаимодействия «скручивание», противовесы совершают горизонтальные встречные или «скрестные» колебания относительно общей вертикальной оси. Если на шаг правой ногой, крайняя точка тазобедренного сустава идет вперед, то крайняя правая точка плечевого сустава идет назад, а если на шаг левой ногой крайняя правая точка тазобедренного сустава двигается назад, то крайняя правая точка плечевого сустава движется вперед.
Также движутся и крайние левые точки осевых противовесов. Соединяющая их центральная ось-позвоночник действует как динамическая опора-амортизатор.
При типе взаимодействия «поворот», взаимодействие противовесов характеризуется сонаправленным или однонаправленным перемещением одноименных крайних точек «коромысла плеч» и таза. Если крайняя правая точка рычага таза движется вперед, то и крайняя точка «коромысла плеч» движется вперед. То есть крайние точки осевых противовесов движутся однонаправлено, Сначала, таз как бы разгоняет плечи, а потом плечи, используя ускорение ног и таза, передают движение по цепочке в руку.
При типе взаимодействия «складывание» (встречное) происходит сгибание позвоночного столба вперед, вправо и влево, и прогибаться назад. При данном типе взаимодействия осевых противовесов рычаг таза движется навстречу коромыслу плеч.
При «раскачивание» корпуса («качели»), плечевой пояс и таз движутся в противоположных направлениях - разнонаправлено, уравновешивая друг друга, «раскачивание» может происходить вперед-назад, вправо-влево.
Поскольку колебания таза во время ходьбы происходит в заданных границах возможных амплитуд, а тазобедренные суставы при смещении конечностей вращаются, то крайние точки таза при возврате для последующего отталкивания движутся по замкнутой кривой, образуя пространственную восьмерку, внутри проекции площади опоры. В гимнастике ХОД таких восьмерок различают две: вперед и назад. При ходьбе смещения таза более явные, а смещение плечевого пояса более скрытые. Помимо горизонтальных колебаний, крайние точки фронтальной «плечевой оси», называемые «коромысла плеч» колеблются также вверх-вниз относительно друг друга, как разные концы качелей. Такое объемное колебание вперед-назад, вверх-вниз приводит к движению крайней точки плечевого сустава по окружности, указанные траектории при перемещениях совмещаются и характеризуют естественные движения рычагов, как пространственные восьмерки, которые во всех отделах системы управляемых осевых противовесов являются «плавающим» способом движения. Существует взаимосвязь движений коромысла плеч и таза: при вращении коромысла плеч вперед таз совершает восьмерку назад, при вращении коромысла плеч назад таз совершает восьмерку вперед. Зависимость верхних конечностей от плечевого пояса очевидна, так как без ключицы, лопатки и плечевого сустава, рычаг плеча не двигается, а без рычага плеча не может двигаться предплечье и т.д. То же касается зависимости таза и ног. Поэтому верхние и нижние конечности в гимнастике ХОД рассматриваются как составные части или элементы осевых противовесов. Каждый противовес имеет правую и левую стороны, а конечности составлены из рычагов, соединенных суставами-шарнирами. Отношения существуют не только между верхним и нижним комплексами, но и внутри самих комплексов: взаимодействие правой и левой сторон, взаимодействие рычагов конечностей (плечо-предплечье-кисть, бедро-голень-стопа). Подобные взаимодействия происходят с помощью центральной оси-опоры позвоночника (ЦО).
Основным тренажером гимнастики ХОД является гимнастическая палка. Гимнастика ХОД состоит из трех частей:
Первая часть представляет собой комплекс упражнений с одной палкой и состоит из фигур: завивание, завивание с подкрутом, вращение внутрь, вращение наружу, малая восьмерка с плеча (сверху-вниз), малая восьмерка с бедра (снизу-вверх), большая восьмерка с плеча, большая восьмерка с бедра, спираль внутрь, спираль наружу.
Вторая часть представляет собой комплекс упражнений с двумя палками (палка в левой и правой руках) образуют двойные фигуры, отраженные в первой части. Особое внимание следует уделять работе фигур палками в перемещениях, которые должны быть естественными, т.е. обеспечивать устойчивость и маневренность (скорость) в разных режимах и направлениях, при этом следует согласовывать движения рук и ног.
Третья часть представляет собой комплекс двойных разнофигурных вращений, носящих взаимно противоположный сложно координированный характер. Например, правая рука - восьмерка с плеча, левая - восьмерка с бедра или левая рука завивание с подкрутом, а правая - спираль внутрь и так далее. Все движения рычагов опорно-двигательного аппарата, как системы управляемых осевых противовесов (тазобедренного комплекса, комплекса плечевого пояса, оси позвоночника) и движения палки всегда строятся на центростремительных ускорениях относительно единой центральной оси позвоночника за счет возвратных движений по замкнутым и циклическим траекториям в виде конусов, восьмерок и спиралей. Как пример: прижимание сустава плеча к груди при движении руки вперед и прижимание лопатки к позвоночнику при движении руки назад. Особое внимание необходимо обратить на «плавание» в суставах рычагов ног и поясничного отдела позвоночника. Как пример: движение стоп, коленей и таза по траекториям «восьмерок вперед» и «восьмерок назад» с одновременной амортизационной функцией в этих суставах вверх-вниз. При исполнении фигур необходимо добиваться четких ощущений правильных параметров фигур. То есть надо постоянно мысленно отслеживать и корректировать по ходу всего движения правильные параметры исполнения фигур через ощущения, каждый раз «проживая» движения от начальной до конечной фазы. Такой подход соединения - мысль, ощущение, движение в одном действии - позволит сократить время обучения, значительно улучшить качество и рациональность действия и способность поддержать здоровье на хорошем уровне в любом возрасте.
Предложенный способ оздоровительный гимнастики направлен на усиление эффекта оздоровления организма при естественном движении человека путем управления координированными движениями всех рычагов опорно-двигательного аппарата как единой функциональной системы с учетом индивидуальной антропометрии каждого человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЗДОРОВИТЕЛЬНОЙ ГИМНАСТИКИ "СПИРАЛЬ" | 2008 |
|
RU2383325C1 |
| СПОСОБ СУСТАВНОЙ ОЗДОРОВИТЕЛЬНОЙ ГИМНАСТИКИ | 2015 |
|
RU2599205C1 |
| СПОСОБ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ПРОЯВЛЕНИЙ ПОЯСНИЧНОГО ОСТЕОХОНДРОЗА "ДЕЛЬТА АЛЬТЕРНАТИВА АНДРЕЯ НЕКРАСОВА" | 2006 |
|
RU2289382C1 |
| СПОСОБ ОЗДОРОВИТЕЛЬНОЙ ГИМНАСТИКИ | 2004 |
|
RU2266093C2 |
| СИСТЕМА ПОДДЕРЖКИ ПСИХОФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ЧЕЛОВЕКА | 2013 |
|
RU2544643C1 |
| СПОСОБ ЛЕЧЕБНО-ОЗДОРОВИТЕЛЬНОГО ВОЗДЕЙСТВИЯ НА ЧЕЛОВЕКА | 1998 |
|
RU2121332C1 |
| Способ коррекции идиопатического сколиоза грудного отдела позвоночника у девочек 11-15 лет | 2023 |
|
RU2808350C1 |
| Способ коррекции идиопатического сколиоза поясничного отдела позвоночника у девочек 11-15 лет | 2023 |
|
RU2804216C1 |
| Оздоровительная гимнастика для спины | 2021 |
|
RU2793214C1 |
| Методика коррекции S- и С-образных сколиозов у подростков 12-15 лет с помощью упражнений карате Киокусинкай | 2016 |
|
RU2641846C2 |



































































Изобретение относится к медицине, лечебной физкультуре и может быть использовано в общеукрепляющих целях, а также при специальной подготовке спортсменов. Способ включает выполнение гимнастики с использованием гимнастической палки или палок. Начинают упражнения из устойчивой маневренной позиции: ноги на ширине плеч и пружинят, колени присогнуты, стопы параллельны, упор на всю площадь стоп, корпус прямой, взгляд вперед, живот и ягодицы подтянуты, кисть обхватывает палку, или в обеих кистях - по палке. Проводят динамически устойчивые движения по замкнутым криволинейным траекториям - «восьмеркам» на основе центростремительных ускорений к оси позвоночника внутри проекции площади тела. Каждое движение представляет собой системное пространственно-временное взаимодействие трех управляемых осевых противовесов (ОП) опорно-двигательного аппарата: центральная ось-опора - позвоночник, ведущий нижний ОП - тазобедренный комплекс, включая таз и рычаги нижних конечностей, зависимый верхний ОП - комплекс плечевого пояса и рычаги верхних конечностей, в виде четырех типов взаимодействия ОП относительно общей вертикальной оси - позвоночника: взаимодействие «скручиванием», «поворотом», встречное взаимодействие «складывание» и раскачивание - «качели». При «скручивании» ОП совершают горизонтальные встречные или скрестные колебания относительно позвоночника. При «повороте» ОП осуществляют сонаправленное или однонаправленное перемещение одноименных крайних точек плеч и таза. При «складывании» - сгибание позвоночного столба вперед, вправо и влево, прогиб назад, при этом осуществляют движение рычага таза навстречу рычагу плеч. При «качелях» плечи и таз движутся в противоположных направлениях вперед-назад, вправо-влево, уравновешивая друг друга. Способ обеспечивает оздоровление организма при естественном движении человека путем управления координированными движениями всех рычагов опорно-двигательного аппарата как единой функциональной системы, с учетом индивидуальной антропометрии каждого человека, при комплексном сочетании движения с волей-намерением, мыслью-представлением, чувством-ощущением. 93 ил.
Способ оздоровительной гимнастики, включающий выполнение упражнений с использованием гимнастической палки или палок, отличающийся тем, что выполнение упражнений начинают из устойчивой маневренной позиции (УМП): ноги на ширине плеч, колени слегка согнуты, стопы параллельны, ноги пружинят, упор осуществляют на всю площадь стоп, корпус прямой, взгляд вперед, живот и ягодицы подтянуты, кистью обхватывают палку, или в обеих кистях держат по палке, выполняют упражнения, включающие динамически устойчивые движения по замкнутым криволинейным траекториям - «восьмеркам», основанным на центростремительных ускорениях к оси позвоночника внутри проекции площади тела; при этом каждое движение представляет собой системное пространственно-временное взаимодействие трех управляемых осевых противовесов опорно-двигательного аппарата: центральная ось-опора - позвоночник, ведущий нижний осевой противовес - тазобедренный комплекс, включающий таз и рычаги обеих нижних конечностей, зависимый верхний осевой противовес - комплекс плечевого пояса и рычаги верхних конечностей, причем это взаимодействие осуществляют в виде четырех типов взаимодействия осевых противовесов относительно общей вертикальной оси - позвоночника: взаимодействие «скручиванием», «поворотом», встречное взаимодействие «складывание» и раскачивание - «качели», при этом при «скручивании» противовесы совершают горизонтальные встречные или скрестные колебания относительно позвоночника, при взаимодействии «поворотом» противовесы осуществляют сонаправленное или однонаправленное перемещение одноименных крайних точек плеч и таза; при типе взаимодействия «складывание» проводят сгибание позвоночного столба вперед, вправо и влево, прогиб назад, при этом осуществляют движение рычага таза навстречу рычагу плеч; при типе взаимодействия «качели» движения плеч и таза осуществляют в противоположных направлениях вперед-назад, вправо-влево, уравновешивая при этом друг друга.
| СПОСОБ ОЗДОРОВИТЕЛЬНОЙ ГИМНАСТИКИ "СПИРАЛЬ" | 2008 |
|
RU2383325C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ДЕФОРМАЦИЙ И ДЕГЕНЕРАТИВНЫХ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355372C2 |
| СПОСОБ ОЗДОРОВИТЕЛЬНОЙ ГИДРОКОРРЕКЦИИ ЧЕЛОВЕКА С НАРУШЕННОЙ ОСАНКОЙ | 2004 |
|
RU2281745C2 |
| CN 2905120 Y, 30.05.2007, реферат | |||
| Примерный комплекс упражнений с гимнастической палкой, 16.03.2012, найдено [26.03.2014] из Интернет | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

