Область техники, к которой относится изобретение
Настоящее изобретение относится к летательным аппаратам и/или тягачам, содержащим систему оповещения о значениях угла поворота, и включает в себя способ оповещения о том, что угол поворота на летательном аппарате превысил допустимое значение.
Уровень техники
Для перемещения летательного аппарата по земле часто используется буксировочный тягач, сцепленный с носовым шасси. При этом буксировочный тягач может развернуть шасси на угол, превышающий допустимый и вызвать, тем самым, повреждение узла шасси.
Известны системы, которые обеспечивают оповещение о том, что угол поворота превышает допустимое значение. Известно, например использование цветовой маркировки, наносимой на поворотную опору шасси, а также цветовой маркировки, наносимой на корпусе летательного аппарата и/или на неподвижные части переднего шасси. Эта маркировка выполняется таким образом, что расположение ее элементов друг относительно друга обеспечивает визуальное оповещение в случае, когда поворот переднего шасси превышает допустимый угол. Однако подобные системы могут оказаться неэффективными в результате воздействия таких неблагоприятных факторов, как плохая видимость и рассеянность водителя.
Другая система оповещения описана в патентной заявке США No. 10/795,539 (US 2005/0196256). Эта система оповещения содержит два ультразвуковых датчика, установленных на тягаче, при этом, как минимум один из этих датчиков позволяет обнаруживать присутствие над ним конструкции летательного аппарата, когда угол поворота относительно мал, и не может обнаруживать указанную конструкцию, когда угол поворота относительно велик. Таким образом, когда один из датчиков не может обнаружить присутствие конструкции летательного аппарата, система сигнализирует оператору о том, что угол поворота может оказаться слишком большим. Такая система требует применения тягача специальной конструкции и считается чрезмерно сложной. Кроме того, эта система использует детектирование сигнала, отраженного от конструкции летательного аппарата и, следовательно, может быть подвержена неблагоприятному воздействию на детектор сигнала грязи или посторонних объектов. Кроме того, подобная система требует калибровки в зависимости от конкретной модели буксируемого летательного аппарата.
Раскрытие изобретения
Целью настоящего изобретения является уменьшение влияния, хотя бы одного из перечисленных выше недостатков. Еще одной или дополнительной целью настоящего изобретения является создание простого, надежного и/или эффективного средства оповещения о том, что угол поворота во время маневров летательного аппарата на земле превышает допустимое значение.
Настоящее изобретение представляет собой систему оповещения о значениях угла поворота, содержащую блок измерения угла поворота расположенный на летательном аппарате, при этом при этом блок измерения угла поворота формирует на выходе первый сигнал в зависимости от узла поворота между посадочным шасси и горизонтальной осью фюзеляжа летательного аппарата, а блок тревожной сигнализации позволяет вырабатывать сигнал тревоги в зависимости от состояния первого сигнала, когда угол поворота превышает заданное значение.
Поскольку блок измерения угла поворота расположен на летательном аппарате, система оповещения может использоваться всегда и везде, где производится буксировка летательного аппарата, вне зависимости от конкретного типа используемого тягача. Кроме того, тягач не требует ни каких модификаций. Блок измерения угла поворота желательно полностью размещать на летательном аппарате.
Термин "угол поворота" будет без труда понятен специалисту в данной области. Тем не менее, для того, чтобы исключить какую-либо неопределенность толкования этого термина, поясняется, что он означает угол (при взгляде сверху) между направлением прямого движения, колеса (или колес) переднего посадочного шасси без тормозного башмака и продольной осью летательного аппарата. Таким образом, угол поворота в 0 градусов соответствует повороту переднего шасси в направлении, параллельном горизонтальной оси летательного аппарата. Угол поворота в 60 градусов соответствует положению шасси, развернутому под углом 60 градусов по отношению к горизонтальной оси летательного аппарата, измеренному спереди летательного аппарата в направлении либо по, либо против часовой стрелки.
Некоторые элементы системы оповещения о значениях угла поворота могут представлять собой и такие компоненты, которые присутствуют на определенных летательных аппаратах, даже в том случае, когда там не установлена система оповещения о значениях угла поворота в соответствии с настоящим изобретением, Они, например, могут включать в себя те компоненты, которые в любом случае были бы предусмотрены для выполнения функций, отличных от тех, которые они выполняют в системе оповещения о значениях угла поворота в соответствии с настоящим изобретением. Определенные элементы системы оповещения о значениях угла поворота могут также быть встроены в системы летательного аппарата. Для вариантов исполнения настоящего изобретения, которые относятся к модернизации системы оповещения о значениях угла поворота эти элементы уже имеются на летательном аппарате. Определенные элементы системы оповещения о значениях угла поворота могут быть построены таким образом, что они будут выполнять как некоторую функцию по отношению системы оповещения о значениях угла поворота, так и другую функцию, не связанную с работой системы оповещения о значениях угла поворота.
Блок измерения угла поворота может являться частью системы рулевого управления летательного аппарата. Блок измерения угла поворота может быть построен таким образом, что он будет формировать на выходе второй сигнал, в зависимости от значения угла поворота, а система рулевого управления летательного аппарата может быть построена таким образом, что она будет обеспечивать пилоту индикацию угла поворота на основе состояния второго сигнала. Далее будет понятно, что для некоторых вариантов исполнения настоящего изобретения в качестве первого и второго сигналов может быть использован один и тот же сигнал. Например, блок измерения угла поворота может быть построен таким образом, что он будет формировать на выходе один сигнал, определяемый значением угла поворота, который будет использоваться как системой рулевого управления, так и системой оповещения о значениях угла поворота.
Конфигурация, при которой элемент системы оповещения о значениях угла поворота является частью другой системы летательного аппарата, или встроен в эту систему, рассматривается как наиболее удобная, поскольку позволяет построить весьма простую систему оповещения. В частности, при модернизации системы оповещения о значениях угла поворота может потребоваться лишь относительно небольшая модификация существующего летательного аппарата и (или) внесение относительно небольших изменений при проектировании нового летательного аппарата. Кроме того, существующие системы летательных аппаратов обычно весьма надежны, поскольку они проходят строгие испытания на безопасность.
Типичный летательный аппарат может иметь, как минимум, один поворотный регулируемый дифференциальный датчик (ПРДЦ), установленный на переднем шасси. Датчик ПРДЦ формирует на своем выходе сигнал, обычно в виде напряжения, который зависит, (как правило, пропорционально), от угла поворота посадочного шасси, и обычно связан с гидравликой системы рулевого управлении летательного аппарата. Блок измерения угла поворота для одного из вариантов исполнения настоящего изобретения может содержать поворотный регулируемый дифференциальный датчик (ПРДЦ). Блок измерения угла поворота может содержать несколько ПРДЦ. Блок измерения угла поворота может быть расположен на переднем шасси.
Сигнал тревоги может представлять собой звуковой сигнал. В качестве альтернативы, или дополнительно, сигнал тревоги может представлять собой визуальный сигнал. Сигнал тревоги может, например, быть световым. Свет может иметь окраску. Сигнал тревоги может представлять собой стробирующий (проблесковый) световой сигнал от стробоскопического источника света. Считается, что стробирующий световой сигнал в качестве сигнала тревоги наиболее эффективен, поскольку его хорошо видно из большинства положений.
Блок тревожной сигнализации желательно располагать вблизи нахождения наземной команды буксировки во время выполнения обычных действий, которые имеют место во время буксировки. Блок тревожной сигнализации может размещаться на летательном аппарате. Например, блок тревожной сигнализации может быть расположен на переднем шасси летательного аппарата. Блок тревожной сигнализации может размещаться в таком месте, где его положение не будет меняться в зависимости от угла поворота. Например, блок тревожной сигнализации может размещаться на основном фитинге переднего шасси, откуда он будет виден водителю тягача при всех возможных углах буксировки.
Блок тревожной сигнализации может размещаться на тягаче, предназначенном для буксировки летательного аппарата. Подобное устройство особенно удобно, когда, например, переднее шасси не видно из кабины водителя тягача.
Система оповещения о значениях угла поворота может содержать несколько блоков тревожной сигнализации (например, первый блок тревожной сигнализации будет располагается на летательном аппарате, а второй на тягаче), которые будут вырабатывать сигнал тревоги, когда угол поворота превысит заданное значение. Разумеется, должно быть понятно, что когда здесь упоминается блок тревожной сигнализации, то может иметься ввиду как один, так и несколько блоков из некоторой совокупности блоков тревожной сигнализации. Когда используется более одного блока тревожной сигнализации, эти блоки могут конфигурироваться и строиться по разному. Например, один блок тревожной сигнализации будет формировать звуковой сигнал тревожной сигнализации, в то время как другой блок тревожной сигнализации будет вырабатывать визуальный сигнал.
Блок тревожной сигнализации предназначен, главным образом, для того, чтобы вырабатывать сигнал тревоги, когда угол поворота приближается к максимально допустимому значению или превышает его. Таким образом, желательно, чтобы это заданное значение было бы близко или равно максимально допустимому значению угла поворота. Максимально допустимое значение обычно представляет собой угол, превышение которого вызывает существенный риск повреждения шасси. Заданное значение может лежать в пределах от 60% до 100% от максимально допустимого угла поворота летательного аппарата. Заданное значение может лежать в пределах от 70% до 95% максимально допустимого значения угла поворота. Заданное значение может лежать в пределах от 80% до 90% от максимально допустимого значении угла поворота. Заданное значение может лежать в пределах от 40 до 70 градусов. Заданное значение может лежать в пределах от 55% до 65% градусов.
Далее будет понятно, что блок тревожной сигнализации предназначен для выполнения единственной функции, перехода из состояния отсутствия тревоги в состояние тревоги. Настоящее изобретение, например, включает в себя принцип, при котором блок тревожной сигнализации вырабатывает сигнал (звуковой, световой и пр.), если угол поворота меньше определенного значения и прекращает действие этого сигнала, когда угол поворота превысит данное значение. Будет понятно, что в этом случае термин сигнал тревоги включает в себя изменение исходного состояния (например, переход от шума к молчанию). Блок тревожной сигнализации может также быть построен таким образом, что он будет вырабатывать сигнал тревоги, в том случае, и, желательно, только в том случае, когда имеют место некоторые другие параметры (не связанные с превышением угол поворота определенного значения). Эти параметры могут вводиться пользователем. Например, блок тревожной сигнализации может вырабатывать сигнал тревоги только в том случае, когда замкнут карабин троса. Это позволить предотвратить случайную выработку сигнала тревоги, когда летательный аппарат не буксируется. Блок тревожной сигнализации может вырабатывать сигнал тревоги в течение короткого периода после замыкания карабина буксировочного троса. Такая организация дает пользователю уверенность в том, что система функционирует.
Система оповещения о значениях угла поворота может содержать блок сравнения, который предназначен для того, чтобы обнаруживать превышение углом поворота заданного значения. Блок сравнения принимает первый сигнал, определяет по значению этого сигнала, не превышает ли угол поворота заданного значения и вводит управляющий сигнал в блок тревожной сигнализации в зависимости от результата этого определения, а блок тревожной сигнализации принимает указанный управляющий сигнал и вырабатывает сигнал тревоги в соответствии с значением управляющего сигнала. Блок сравнения может содержать электронную схему, например, в виде простого делителя напряжения или моста Уинстона. Эта электронная схема может быть объединена с другими схемами летательного аппарата. Блок сравнения может содержать диод. Блок сравнения может содержать логическую схему. Блок сравнения может содержать программный модуль. Этот программный модуль может быть объединен с другими программными средствами летательного аппарата. Блок сравнения, использующий программный модуль является предпочтительным, поскольку программные средства просты в обслуживании и имеют тенденцию к удешевлению.
Блок сравнения может быть построен таким образом, что он будет определять, не превысил ли угол поворота определенный порог (обычно пороговое значение угла поворота несколько ниже максимально допустимого). Например, блок сравнения может сравнивать первый сигнал с порогом и в зависимости от результата сравнения формировать на выходе управляющий сигнал. Блок сравнения может определять приближение угла поворота к максимально допустимому значению. Блок сравнения может, например, определять скорость изменения угла поворота и решать, не превысит ли угол поворота максимально допустимое значение в течение заданного (относительно короткого) периода времени. Если окажется, что превышение этого значения весьма вероятно, блок сравнения выработает на выходе управляющий сигнал. Таким образом, управляющий сигнал может быть сформирован на выходе прежде, чем угол поворота превысит заданное значение. Подобная организация может оказаться удобной, поскольку она обеспечивает раннее предупреждение, позволяющее предотвратить существенные повреждения, которые могли бы возникнуть при большой скорости изменения угла поворота во время его приближения к максимально допустимому значению.
Должно быть понятно, что, хотя используемые в различных вариантах исполнения данного изобретения сигналы, как, например, первый сигнал, второй сигнал и (или) управляющий сигнал обычно (и предпочтительно) являются электрическими сигналами, например, используют напряжение, эти сигналы могут также быть представлены и в механической форме, например, в виде движения зубчатого колеса или рычага. Кроме того, будет понятно, что состояние "сигнала" может включать в себя и нулевое, когда сигнал физически отсутствует. Для электрического сигнала это может быть, например, значение 0 Вольт.
Управляющий сигнал может, конечно, быть в значительной степени идентичен первому сигналу. Блок сравнения может, например, просто транслировать первый сигнал в блок тревожной сигнализации, когда угол поворота превышает заданное значение.
Другой аспект настоящего изобретения включает в себя летательный аппарат, содержащий переднее шасси и систему рулевого управления летательного аппарата, содержащую блок измерения угла поворота, при этом блок измерения угла поворота построен таким образом, что в процессе использования он выводит на интерфейс первый сигнал, в зависимости от значения угла поворота, при этом интерфейс разрешает блоку тревожной сигнализации принимать от интерфейса сигнал, по которому блок тревожной сигнализации в процессе его использования будет формировать сигнал тревоги, в случае, когда угла поворота превышает заданное значение. Интерфейс преимущественно отделяется от всех средств, служащих для того, чтобы обеспечивать пилоту индикацию угла поворота. Предпочтительно, чтобы блок измерения угла поворота в процессе использования формировал бы на выходе, в зависимости от угла поворота, также и второй сигнал, который обеспечивал бы пилоту индикацию угла поворота.
Блок тревожной сигнализации желательно (но не обязательно) располагать на летательном аппарате (например, на переднем шасси). Таким образом, в соответствии с настоящим изобретением летательный аппарат может, как содержать, так и не содержать блок тревожной сигнализации. Летательный аппарат может, например, быть связан с тягачом, который сцеплен с передним шасси, а блок тревожной сигнализации при этом будет размещаться на тягаче. Настоящее изобретение, таким образом, раскрывает также подобный летательный аппарат вместе с подобным тягачом. Подобное выполнение дает особые преимущества в одном из вариантов осуществления настоящего изобретения, в котором система оповещения о значениях угла поворота использует несколько блоков тревожной сигнализации, поскольку в этом случае, как минимум, один блок тревожной сигнализации может располагаться на летательном аппарате и, как минимум, один - на тягаче.
Далее также будет понятно, что хотя интерфейс и желательно размещать на летательном аппарате, тем не менее обязательным это не является. По крайней мере, часть интерфейса может размещаться на летательном аппарате; часть интерфейса может размещаться на тягаче, а часть интерфейса может размещаться вместе с блоком тревожной сигнализации. Например, для варианта осуществления данного изобретения, в котором блок тревожной сигнализации размещается на тягаче, интерфейс может располагается на тягаче, на блоке тревожной сигнализации и на летательном аппарате. Интерфейс может соде ржать соединитель, например, в виде соединительной панели с розеточной частью, на который посылается первый сигнал, или сигнал от него зависимый. При этом к соединителю в процессе использования может подключаться кабель для передачи указанного сигнала в блок тревожной сигнализации. Интерфейс может содержать кабель, например, кабель, непосредственно соединяющий блок измерения угла поворота и блок тревожной сигнализации для передачи первого сигнала. Интерфейс может соединять летательный аппарат с тягачом. Интерфейс может обеспечивать беспроводную связь, например, беспроводную передачу первого сигнала в блок тревожной сигнализации. Блок измерения угла поворота может выводить первый сигнал через блок сравнения, при этом блок сравнения позволяет определять, в зависимости от состояния первого сигнала, не превысил ли угла поворота заданное значение и выводить, в зависимости от результата, управляющий сигнал в блок тревожной сигнализации. При этом блок тревожной сигнализации принимает этот управляющий сигнал и, в зависимости от его состояния, вырабатывает сигнал тревоги.
Блок сравнения может размещаться на летательном аппарате. Блок сравнения может размещаться на тягаче. Интерфейс может давать разрешение блоку тревожной сигнализации принимать управляющий сигнал.
Еще одним аспектом настоящего изобретения является летательный аппарат, содержащий переднее шасси и блок измерения угла поворота, служащий для измерения угла поворота переднего шасси, в котором блок измерения угла поворота в процессе использования обеспечивает вывод первого сигнала в блок тревожной сигнализации, в зависимости от угла поворота, при этом блок тревожной сигнализации вырабатывает сигнал тревоги, на основе состояния первого сигнала, когда угол поворота превышает заданное значение. Летательный аппарат может также содержать систему рулевого управления, блок измерения угла поворота которой вырабатывает на выходе второй управляющий сигнал в зависимости от угла поворота, а система рулевого управления летательного аппарата обеспечивает пилоту индикацию угла поворота, в зависимости от состояния второго сигнала. Блок тревожной сигнализации может располагаться на летательном аппарате.
Еще одним аспектом настоящего изобретения является способ оповещения о превышенном значении угла поворота на летательном аппарате, включающий в себя следующие этапы:
(1) вывод из блока измерения угла поворота, расположенного на летательном аппарате, первого сигнала в зависимости от значения угла поворота между шасси и горизонтальной осью фюзеляжа летательного аппарата,
(2) определение на основе значения первого сигнала превышения угла поворота заданного значения, и в случае, если угол поворота превышает заданное значение,
(3) генерацию сигнала тревоги.
Этап, на котором определяется превышение углом поворота заданного значения, может выполняться блоком сравнения. При этом способ включает в себя этапы вывода из блока сравнения управляющего сигнала, зависящего от результата указанного определения, приема управляющего сигнала блоком тревожной сигнализации, формирования сигнала тревоги на основе состояния управляющего сигнала. Еще одним аспектом настоящего изобретения является набор деталей, содержащий блок тревожной сигнализации и интерфейс, позволяющий блоку тревожной сигнализации принимать первый сигнал от блока измерения угла поворота. Данный набор деталей позволяет модифицировать любой летательный аппарат в летательный аппарат, соответствующий настоящему изобретению. Настоящее изобретение также включает а себя набор деталей, обеспечивающий модернизацию на летательном аппарате системы оповещения о значениях угла поворота.
Указанный комплект деталей может также содержать блок сравнения, определяющий, не превышает ли угол поворота заданного значения.
Еще одним аспектом настоящего изобретения является тягач для буксировки летательного аппарата, содержащий блок тревожной сигнализации, обеспечивающий прием первого сигнала от блока измерения угла поворота на летательном аппарате, при этом блок тревожной сигнализации позволяет также вырабатывать сигнал тревоги, на основе значения первого сигнала, когда угол поворота летательного аппарата превысит заданное значение.
Далее будет понятно, что признаки, описанные в отношении одного из аспектов настоящего изобретения в равной степени применимы и к другим аспектам настоящего изобретения. Например, тягач может также содержать описанный выше блок сравнения.
Краткое описание чертежей
Ниже, исключительно в качестве примеров, будут описаны различные варианты исполнения настоящего изобретения со ссылками на следующие схематические чертежи.
Фигуры 1 и 2 представляют изображение переднего шасси летательного аппарата, содержащего систему оповещения о значениях угла поворота в соответствии с первым вариантом исполнения настоящего изобретения.
Фигура 3 представляет изображение летательного аппарата, который буксируется тягачом по первому варианту исполнения настоящего изобретения.
Фигура 4 представляет схематическое изображение системы оповещения о значениях угла поворота в соответствии с первым вариантом исполнения настоящего изобретения.
Фигура 5 и 6 представляют общий вид переднего шасси летательного аппарата, содержащего систему оповещения о значениях угла поворота в соответствии со вторым вариантом исполнения настоящего изобретения.
Осуществление изобретения
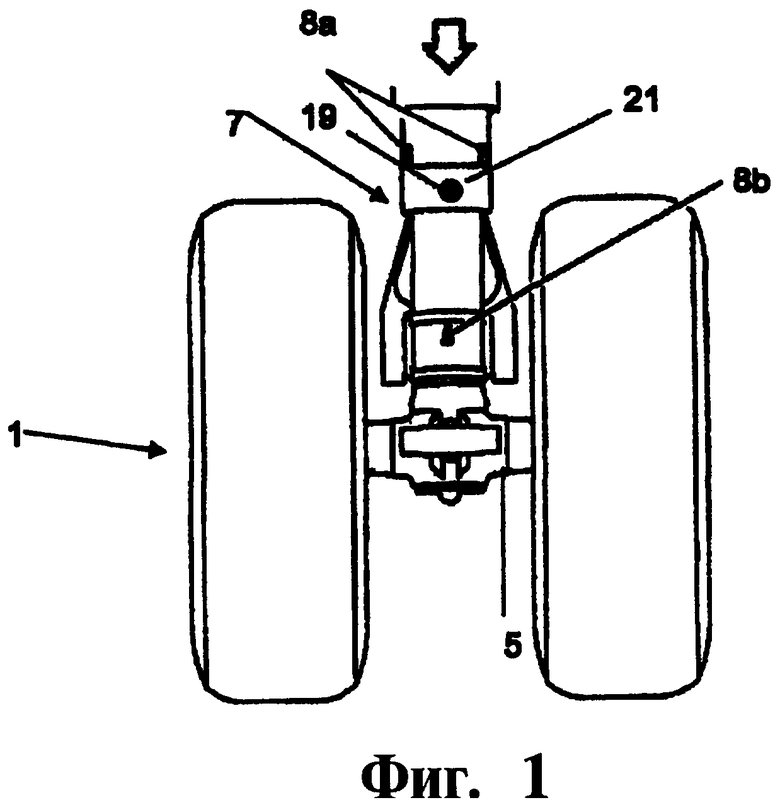
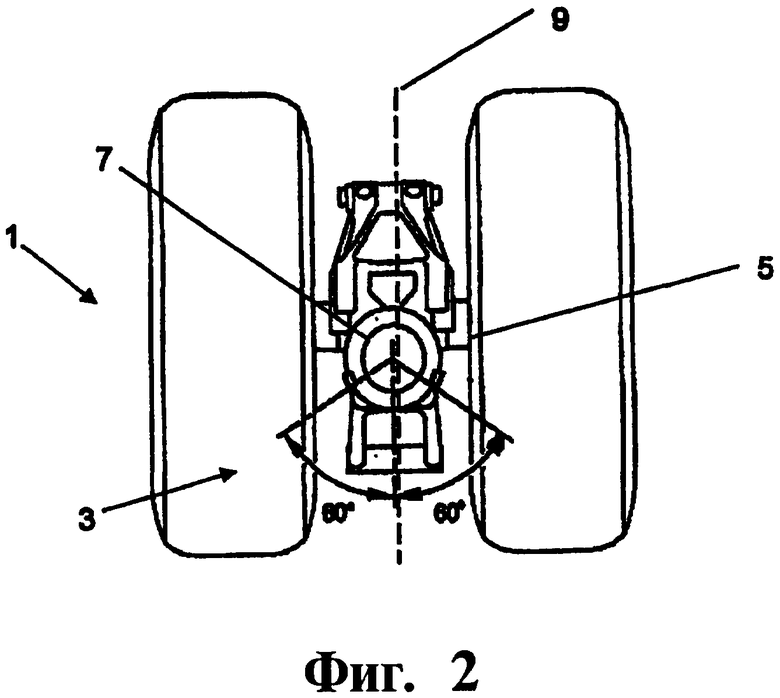
На Фигурах 1 и 2 представлено изображение переднего шасси 1 летательного аппарата 6, изображенного на Фигуре 3, в соответствии с первым вариантом осуществления настоящего изобретения. Переднее шасси содержит два колеса 3, расположенные по обе стороны центральной оси 5. Ось 5 устанавливается на конце опоры 7 шасси. В том виде, каком оно представлено на Фигурах, переднее шасси 1 имеет угол поворота 0 градусов. При этом угле ось 5 перпендикулярна горизонтальной оси 9 летательного аппарата. Максимально допустимый угол поворота переднего посадочного шасси составляет 60 градусов, при превышении которого может произойти повреждение шасси.
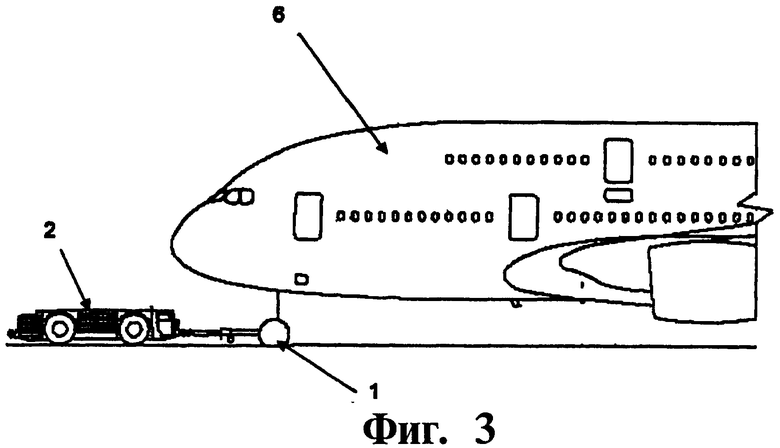
На Фигуре 3 показана буксирующая машина (тягач) 2 во время наземных маневров, сцепленная с передним шасси 1. Буксирный карабин вставлен в панель разъединения системы рулевого управления (не показана) для того, чтобы иметь возможность отсоединять некоторые компоненты системы гидравлики шасси (как в известных устройствах). Когда эти гидравлические компоненты разъединены, переднее шасси, может, до известной степени, свободно вращаться под действием усилия, создаваемого тягачом. Таким образом, тягач 2 может развернуть посадочное шасси 1 на чрезмерно большой угол, при котором будут превышены пределы прочности шасси, в результате чего могут возникнуть значительные повреждения переднего шасси 1, а в некоторых случаях, и окружающих конструкций.
Для того чтобы предотвратить подобную ситуацию переднее шасси 1 содержит маркеры 8а и 8b, нанесенные на главном фитинге 21 и в нижней части переднего шасси 1, соответственно, аналогично тому, как это обычно делается в известных устройствах. Когда маркеры оказываются выровненными в один ряд, это будет означать, что максимально допустимый угол поворота достигнут.Как известно, подобная система имеет определенные недостатки, в частности, связанные с ограничениями, вызванными плохой видимостью и зависимостью от внимания водителя. В соответствии с первым вариантом исполнения настоящего изобретения летательный аппарат 6 дополнительно содержит систему оповещения о значениях угла поворота, подробно описанную ниже со ссылкой на Фигуру 4.
На Фигуре 4 представлено схематическое изображение системы оповещения о значениях угла поворота 4 в соответствии с первым вариантом осуществления настоящего изобретения.
Система оповещения о значениях угла поворота 4 целиком расположена на летательном аппарате и была в него встроена с целью модернизации. Система оповещения о значениях угла поворота 4 содержит блок измерения угла поворота 11, два блока сравнения 13а, 13b и блок тревожной сигнализации 19. Блок измерения угла поворота 11 и блок тревожной сигнализации 19 размещаются на шасси летательного аппарата, а блоки сравнения 13а, 13b помещаются на корпусе фюзеляжа летательного аппарата (соединительная аппаратура 12 обеспечивает электрическое соединение блоков сравнения, блока измерения угла поворота и блока тревожной сигнализации на шарнирно закрепленном шасси 1.
Составные элементы системы оповещения о значениях угла поворота подробно описываются ниже.
Блок измерения угла поворота 11 выполнен в виде поворотного регулируемого дифференциального датчика (ПРДД). На выходе датчика ПРДД формируется первый сигнал (в виде напряжения), в зависимости от степени выдвижения различных гидравлических толкателей в конструкции переднего шасси, и, следовательно, в зависимости от угла поворота летательного аппарата.
В процессе использования первый сигнал ПРДД выводится на интерфейс. В первом варианте осуществления настоящего изобретения интерфейс выполнен просто в виде кабельной системы 14 и соответствующих частей соединительной аппаратуры 12, которые непосредственно соединяют между собой элементы системы оповещения о значениях угла поворота.
Датчик ПРДД является также частью системы рулевого управления летательного аппарата (не показана). Система рулевого управления используется при маневрах летательного аппарата на земле, осуществляемых тяговой силой двигателя, и пилоту обеспечивается индикация угла поворота. Являясь частью системы рулевого управления, ПРДД формирует на выходе второй сигнал (не показан), предназначенный для использования в системе рулевого управления.
Второй сигнал зависит от угла поворота и по первому варианту исполнения настоящего изобретения, в основном, идентичен первому. Таким образом, второй сигнал также передается в соединительную аппаратуру 12, а оттуда пересылается в ту часть системы рулевого управления, которая обеспечивает отображение угла поворота в кабине экипажа.
Блоки сравнения 13а, 13b позволяют принимать первый сигнал от ПРДД по интерфейсу 14.
Из двух блоков сравнения второй блок 13b не используется, пока не возникнет неисправность первого. Блоки сравнения включены в состав центрального модуля обработки ввода-вывода (ЦМОВ/В) летательного аппарата. Модуль ЦМОВ/В содержит ряд блоков обработки и программных модулей и служит для обработки данных, поступающих от многочисленных датчиков летательного аппарата. Основной блок сравнения 13а системы оповещения о значениях угла поворота позволяет определять (на основе первого сигнала, принимаемого от ПРДД), не превысил ли угол поворота заданное значение. В первом варианте осуществления настоящего изобретения первичный блок сравнения содержит стабилитрон (опорный диод Зенера) (не показан). Стабилитрон работает таким образом, что, когда угол поворота меньше 60 градусов, (что соответствует напряжению на выходе ПРДД ниже порогового уровня), сигнал на выходе блока сравнения отсутствует. Однако, как только угол поворота превысит 60 градусов, (и соответствующее напряжение на выходе ПРДД станет выше порогового значения), на выходе стабилитрона появится управляющий сигнал, который поступит на вторичный центр распределения электроэнергии (ВЦРЭ) 15. ВЦРЭ 15 соединен с блоком тревожной сигнализации 19. Когда управляющий сигнал принимается ВЦРЭ, последний передаст сигнал дальше в блок тревожной сигнализации 19 (через источник питания 17).
Блок тревожной сигнализации 19 представляет собой источник красного стробирующего светового сигнала. Он соединен с источником электропитания 17, который обеспечивает необходимое электропитание для стробоскопического источника света 19. Когда сигнал от ВЦРЭ будет принят через интерфейс 14, стробоскопический источник света включается и тут же вырабатывает быстро мигающий и хорошо видимый сигнал тревоги.
Когда угол поворота снова уменьшится до значения ниже 60 градусов, блок сравнения 13а перестанет передавать управляющий сигнал в ВЦРЭ 15 и стробоскопический источник света прекратит вырабатывать сигнал тревоги.
Возвращаясь к Фигурам 1, 2 и 3, необходимо отметить, что стробоскопический источник света 19 устанавливается на главном фитинге 21 опоры переднего шасси 7. Стробоскопический источник света имеет широкое светораспределение, и, когда он вырабатывает сигнал тревоги, его сигнал виден из положения, перпендикулярного оси летательного аппарата, поскольку находится на одном уровне с передним шасси. В результате стробирующий световой сигнал будет хорошо виден, как из кабины тягача 2, так и наземным персоналом (не показан), находящимся вблизи шасси.
Таким образом, система оповещения о значениях угла поворота по первому варианту исполнения настоящего изобретения обеспечивает эффективное оповещение наземного персонала тягача и других лиц, находящихся вблизи летательного аппарата о том, что угол поворота превышает значение 60 градусов. Кроме того, поскольку ПРДД является стандартным элементом, который уже используется в системе рулевого управления летательного аппарата, а блоки сравнения 13а, 13b представляют собой просто диоды, входящие в состав модуля ЦМОВ/В летательного аппарата, данная система оповещения является весьма простой и надежной.
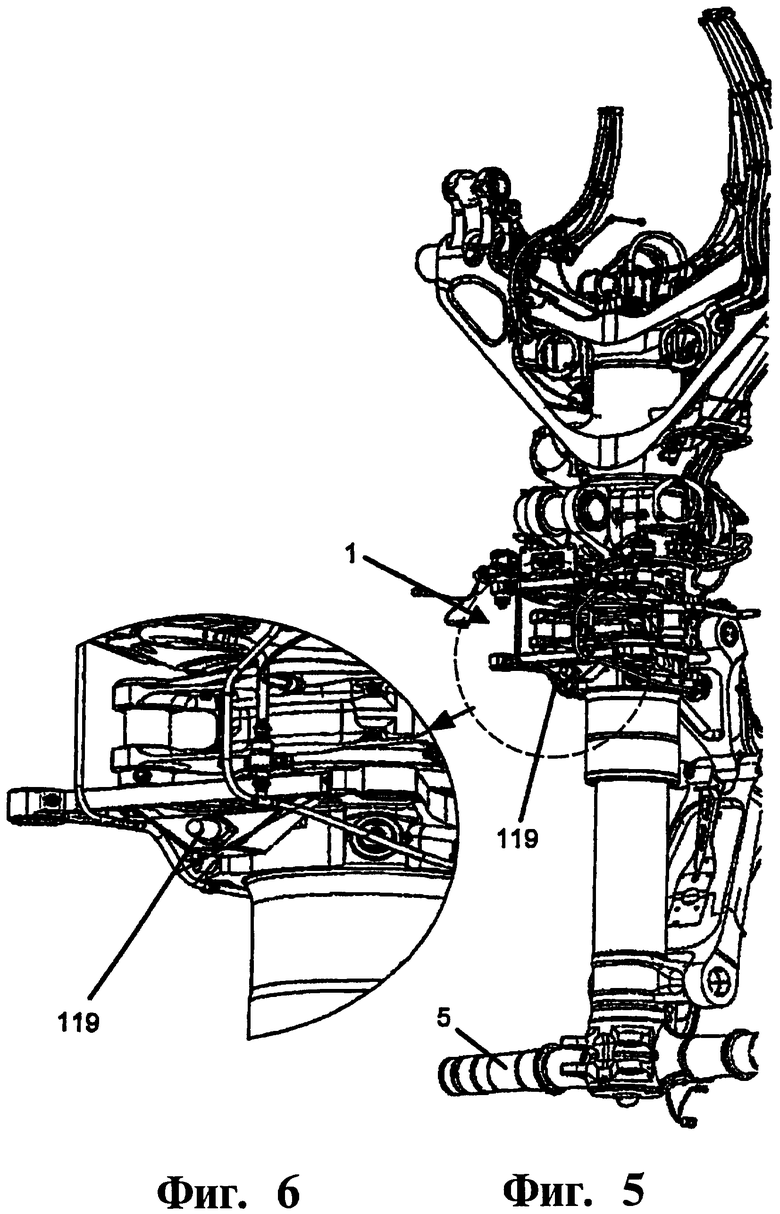
На Фигурах 5 и 6 представлен общий вид переднего шасси летательного аппарата, которое содержит систему оповещения о значениях угла поворота в соответствии со вторым вариантом осуществления настоящего изобретения. Область, помеченная тонкой штриховой линией на Фигуре 5, в увеличенном виде показана на Фигуре 6.
Система оповещения о поворота и оповещения, в основном, соответствует описанию со ссылкой на первый вариант исполнения, за исключением отличий, которые будут рассмотрены ниже.
Первый сигнал, вырабатываемый блоком измерения угла поворота поступает (через аналого-цифровой преобразователь) на программный модуль. Этот программный модуль является частью основной системы программного обеспечения летательного аппарата и позволяет по значению первого сигнала устанавливать превышение углом поворота 55 градусов. Если было определено, что угол поворота летательного аппарата превысил 55 градусов, то этот программный модуль подает управляющий сигнал на блок тревожной сигнализации 119.
После приема этого управляющего сигнала стробоскопический источник света 119, расположенный на опоре посадочного шасси вырабатывает сигнал тревоги. Таким образом, тревожная сигнализация обеспечивается при приближении угла поворота к значению 60 градусов (сигнал тревоги вырабатывается, когда угол превышает 55 градусов).
Система оповещения о значениях угла поворота для второго варианта исполнения настоящего изобретения содержит два блока тревожной сигнализации. Первый блок тревожной сигнализации представляет собой стробоскопический источник света 119, расположенный на посадочном шасси (как было описано выше), а в качестве второго блока используется зуммер, размещенный на тягаче (не показан).
Программный модуль программируется таким образом, что он подает в зуммер управляющий сигнал, когда угол поворота приближается к 60 градусам.
Для того чтобы облегчить пересылку управляющего сигнала от программного модуля на зуммер тягача, летательный аппарат и тягач содержат интерфейс. Этот интерфейс включает в себя первый соединитель (разъем), расположенный на панели разъединения системы рулевого управления летательного аппарата и соответствующий второй соединитель, расположенный на приборном щитке тягача. В процессе использования эти разъемы соединяются при помощи кабеля, который пристыковывается наземным персоналом.
В процессе использования программный модуль выводит управляющий сигнал на первый соединитель, и этот сигнал передается по кабелю в зуммер через второй разъем. Таким образом, интерфейс на летательном аппарате позволяет зуммеру в процессе использования принимать управляющий сигнал, а этот управляющий сигнал включает на тягаче зуммер, который вырабатывает сигнал тревоги, когда угол поворота превышает 55 градусов. Таким образом, предложенная система обеспечивает двойное оповещение в случае возможной, хотя и маловероятной ситуации, когда водитель тягача не сможет увидеть стробирующий сигнал от источника 119.
Программный модуль по второму варианту исполнения позволяет также выполнять ряд других функций. В частности, программное обеспечение не позволяет вырабатывать сигнал тревоги, пока буксирный карабин не вставлен в панель разъединения. Это дает возможность предотвратить ложное формирование сигнала тревоги. Кроме того, программное обеспечение позволяет включать сигнал тревоги на интервал в 5 секунд после того, как буксирный карабин будет вставлен в панель разъединения. Это позволяет удостовериться в том, что система всегда готова к работе, когда летательный аппарат идет на буксире.
В соответствии со вторым вариантом исполнения шасси не содержит маркеров 8а и 8b для указания углов поворота.
Хотя настоящее изобретение было описано и проиллюстрировано со ссылкой на определенные варианты исполнения, специалисту должно быть понятно, данное изобретение может быть реализовано большим числом различных вариантов, конкретно здесь не проиллюстрированных,
Например, блок сравнения может быть выполнен в виде простой электрической схемы, как, например, делитель напряжения. Для блока измерения угла поворота может не требоваться ПРДД. Программный модуль может быть установлен на тягаче. Система оповещения о значениях угла поворота может содержать интерфейс в виде пары источник-приемник, обеспечивая беспроводную передачу первого сигнала в блок тревожной сигнализации. Система может содержать только один блок тревожной сигнализации, при этом этот блок тревожной сигнализации будет располагаться на тягаче. Там, где упоминаемые в вышеприведенном описании узлы или элементы имеют известные, очевидные или предсказуемые эквивалентные варианты исполнения, то предполагается, что эти эквиваленты включены в настоящее описание как ранее отдельно изложенные. Для определения истинной области притязаний настоящего изобретения следует обратиться к формуле изобретения, которая предполагает охват всех этих эквивалентных вариантов исполнения. Лицу, знакомящемуся с сущностью данного изобретения, должно быть понятно, что узлы или признаки настоящего изобретения, которые описаны здесь в качестве предпочтительных, преимущественных, удобных и т.п. являются лишь возможными вариантами и не ограничивают область притязаний независимых пунктов формулы изобретения.
Группа изобретений относится к области транспортировки и маневрирования летательными аппаратами. Система (4) оповещения о значениях угла поворота летательного аппарата содержит блок (11) измерения угла поворота, расположенный на летательном аппарате, и блок (19) тревожной сигнализации. Система (4) оповещения о значениях угла поворота летательного аппарата выполнена с возможностью формирования на выходе первого сигнала в зависимости от угла поворота между передним шасси летательного аппарата и продольной осью фюзеляжа летательного аппарата. Блок (19) тревожной сигнализации выполнен с возможностью формирования сигнала тревоги в зависимости от значения первого сигнала при превышении углом поворота заданного значения, например 60 градусов. Блок (11) измерения угла поворота может быть также выполнен с возможностью осуществления функции, связанной с системой рулевого управления летательного аппарата, например функции индикации для пилота угла поворота во время наземных маневров. Группа изобретений обеспечивает простое, надежное и эффективное оповещение о превышении углом поворота допустимого значения во время маневров летательного аппарата на земле. 3 н. и 19 з.п. ф-лы, 6 ил.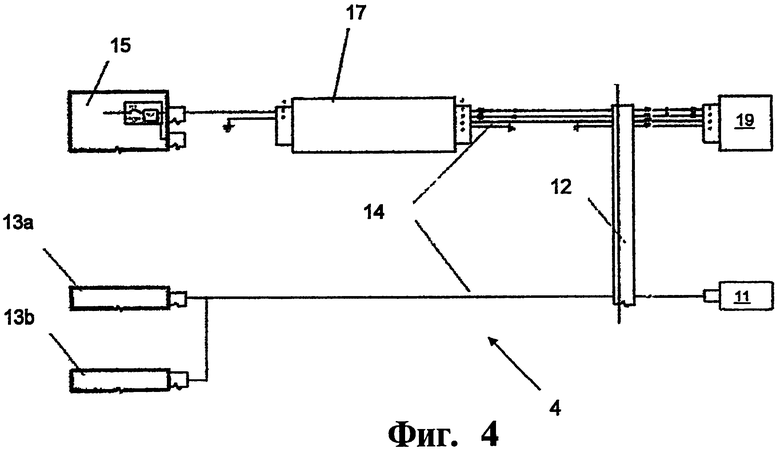
1. Летательный аппарат, включающий переднее шасси и блок измерения угла поворота, при этом блок измерения угла поворота полностью размещен на летательном аппарате, является частью системы оповещения о значениях угла поворота и установлен с возможностью формирования на выходе первого сигнала об угле поворота между передним шасси и продольной осью фюзеляжа летательного аппарата для блока тревожной сигнализации, установленного с возможностью формирования сигнала тревоги в зависимости от первого сигнала при превышении углом поворота заданного значения, близкого к или равного значению угла, превышение которого вызывает существенный риск повреждения шасси.
2. Аппарат по п.1, в котором блок измерения угла поворота является частью системы рулевого управления.
3. Аппарат по п.1, в котором блок измерения угла поворота содержит поворотный регулируемый дифференциальный датчик, расположенный на переднем шасси летательного аппарата.
4. Аппарат по п.1, в котором блок тревожной сигнализации содержит стробоскопический источник света.
5. Аппарат по п.1, в котором блок тревожной сигнализации расположен на летательном аппарате.
6. Аппарат по п.1, в котором блок тревожной сигнализации расположен на тягаче для буксировки летательного аппарата.
7. Аппарат по п.1, в котором заданное значение угла поворота составляет от 80% до 90% от максимально допустимого значения угла поворота летательного аппарата.
8. Аппарат по п.1, в котором заданное значение угла поворота составляет величину от 55 до 65°.
9. Аппарат по п.1, который дополнительно состоит из блока сравнения приема первого сигнала и определения по значению первого сигнала превышения углом поворота заданного значения и по результатам названного определения выдачи управляющего сигнала в блок тревожной сигнализации, который выполнен с возможностью приема названного управляющего сигнала и выдачи сигнала тревоги в зависимости от значения управляющего сигнала.
10. Аппарат по п.9, в котором блок сравнения содержит электронную схему.
11. Аппарат по п.9, в котором блок сравнения содержит программный модуль.
12. Аппарат по п.1, который включает интерфейс, выполненный с возможностью вывода на него первого сигнала и с возможностью распознавания первого сигнала блоком тревожной сигнализации, выполненным с возможностью приема от интерфейса первого сигнала и генерации сигнала тревоги при превышении углом поворота заданного значения.
13. Аппарат по п.12, в котором блок измерения угла поворота выполнен с возможностью генерации второго сигнала в зависимости от угла поворота летательного аппарата и обеспечения для пилота индикации угла поворота.
14. Аппарат по п.12, который содержит дополнительно блок тревожной сигнализации, расположенный на переднем шасси.
15. Аппарат по п.12, который связан дополнительно с тягачом, соединенным с передним шасси, при этом блок тревожной сигнализации расположен на тягаче.
16. Аппарат по п.12, в котором интерфейс содержит соединитель передачи первого сигнала и подключения кабеля для передачи этого сигнала в блок тревожной сигнализации.
17. Аппарат по п.12, в котором интерфейс выполнен с возможностью беспроводной передачи первого сигнала в блок тревожной сигнализации.
18. Аппарат по п.12, который содержит дополнительно блок сравнения для определения в зависимости от значения первого сигнала превышения углом поворота заданного значения и по результатам названного определения выдачи управляющего сигнала в блок тревожной сигнализации, связанный с блоком измерения угла поворота и блоком тревожной сигнализации, выполненным с возможностью приема управляющего сигнала и генерации сигнала тревоги в зависимости от значения управляющего сигнала.
19. Способ оповещения о превышении углом поворота на летательном аппарате допустимого значения, включающий вывод из блока измерения угла поворота, полностью расположенного на летательном аппарате, первого сигнала в зависимости от значения угла поворота летательного аппарата между передним шасси и горизонтальной осью фюзеляжа летательного аппарата, определение на основе значения первого сигнала превышения углом поворота заданного значения, близкого к или равного значению угла, превышение которого вызывает существенный риск повреждения шасси и генерацию сигнала тревоги.
20. Способ по п.19, в котором определение превышения углом поворота заданного значения выполняют посредством блока сравнения, при этом из блока сравнения выводят управляющий сигнал на основе результата указанного определения, принимают управляющий сигнал в блоке тревожной сигнализации и генерируют сигнал тревоги на основе значения управляющего сигнала.
21. Способ по п.19, в котором сигнал тревоги вырабатывают посредством блока тревожной сигнализации, расположенного на летательном аппарате.
22. Тягач для буксировки летательного аппарата, включающий блок тревожной сигнализации для приема первого сигнала от блока измерения угла поворота летательного аппарата, который полностью размещен на летательном аппарате, и на основе состояния первого сигнала формирования сигнала тревоги при превышении углом поворота заданного значения, близкого к или равного значению угла, превышение которого вызывает существенный риск повреждения шасси.
| Генератор сверхвысоких частот | 1980 |
|
SU934879A1 |
| Составной прокатный валок | 1974 |
|
SU501788A1 |
| US 4113041 А, 12.09.1978 | |||
| Устройство для передвижения колесных транспортных средств | 1985 |
|
SU1801094A3 |

