Область техники, к которой относится изобретение
Изобретение относится к электронным управляющим устройствам для транспортных средств, в частности к управляющему блоку для распознавания кражи прицепа транспортного средства.
Уровень техники
Прицепы автомобильных транспортных средств предназначены для транспортировки различных предметов. В общем случае буксирующее транспортное средство тянет прицеп, который может быть использован для временного увеличения грузоподъемности буксирующего транспортного средства. В дополнение к прицепному устройству, соединяющему прицеп с буксирующим транспортным средством, некоторые прицепы оснащены устройствами приема электрических сигналов. Например, управление тормозными фонарями и указателями поворота прицепа может происходить с буксирующего транспортного средства посредством различных электрических сигналов, получаемых от буксирующего транспортного средства. При замедлении буксирующей машины на прицепе будут загораться тормозные фонари. Аналогичным образом указатели поворота прицепа включаются одновременно с указателями поворота на буксирующем транспортном средстве.
Раскрытие изобретения
Для распознавания возможной кражи прицепа предложен способ, в котором определяют электрическую нагрузку системы прицепа до того, как система тревожной сигнализации автомобильного транспортного средства была приведена в готовность, обнаруживают изменения электрической нагрузки после приведения в готовность системы тревожной сигнализации транспортного средства и инициируют срабатывание системы тревожной сигнализации, если электрическая нагрузка по существу отлична от первоначальной электрической нагрузки.
Для выполнения способа может быть использован электронный блок управления (ЭБУ), который включает в себя обрабатывающее устройство, предназначенное для определения первоначальной электрической нагрузки на систему прицепа, обнаружения изменений в электрической нагрузке и подачи сигнала тревоги в случае, если электрическая нагрузка по существу отлична от первоначальной электрической нагрузки.
В системе предусмотрен машиночитаемый носитель, предназначенный для долговременного хранения данных и содержащий выполняемые компьютером команды для определения, присутствует ли прицеп и прикреплен ли он к транспортному средству до приведения в готовность системы тревожной сигнализации, определения электрической нагрузки системы прицепа до приведения в готовность тревожной сигнализации и определения по крайней мере одного минимального порогового значения и максимального порогового значения по крайней мере частично на основании определенной электрической нагрузки. Также предусмотрены команды для приведения в готовность системы тревожной сигнализации транспортного средства, для периодического отслеживания электрической нагрузки и для сравнения отслеживаемой электрической нагрузки с по крайней мере одним минимальным пороговым значением и максимальным пороговым значением для установления изменений электрической нагрузки после того, как система тревожной сигнализации транспортного средства была приведена в готовность. Система тревожной сигнализации срабатывает, когда отслеживаемая электрическая нагрузка превышает максимальное пороговое значение или падает ниже минимального порогового значения.
Краткое описание чертежей
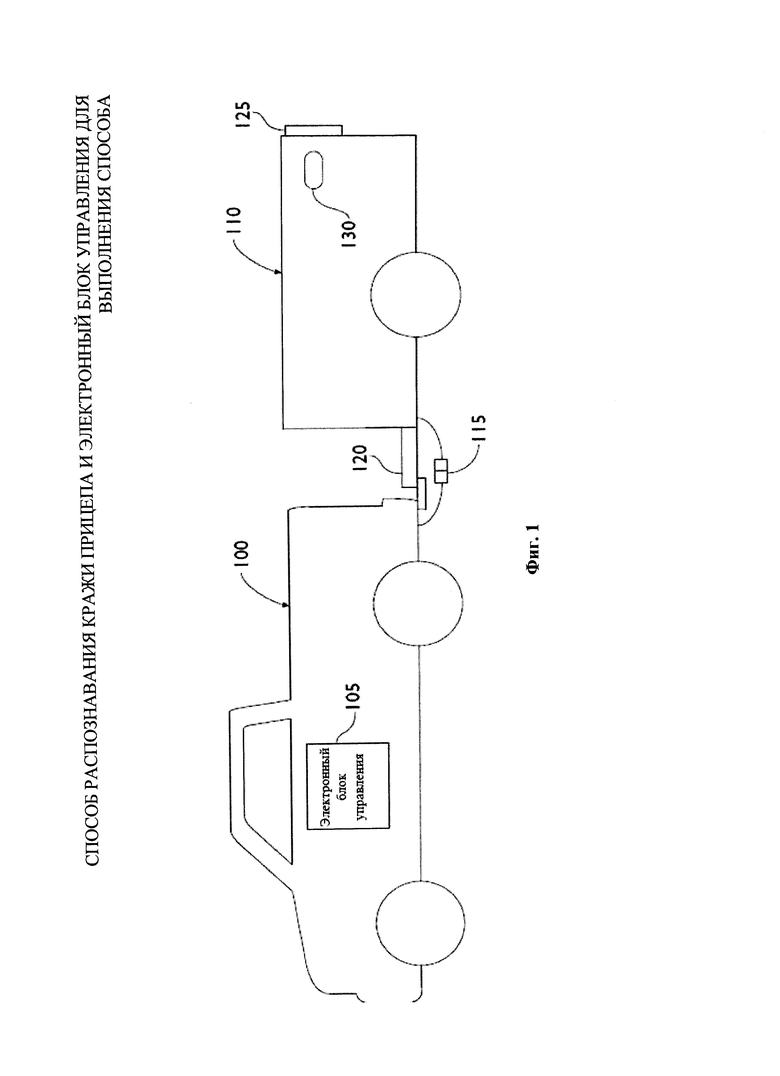
На Фиг.1 представлено схематическое изображение буксирующего автомобильного транспортного средства и прицепа.
На Фиг.2 представлена блок-схема возможных компонентов буксирующего транспортного средства и прицепа, показанных на Фиг.1.
На Фиг.3 приведена диаграмма, на которой показаны примеры значений электрических нагрузок, измеренных во время фазы до готовности системы тревожной сигнализации и примеры пороговых значения, применяемых во время фазы готовности системы тревожной сигнализации.
На Фиг.4 приведена логическая схема способа, который может быть выполнен электронным блоком управления (ЭБУ).
Осуществление изобретения
В одном примере электронный блок управления (ЭБУ) для буксирующего автомобильного транспортного средства включает в себя обрабатывающее устройство, предназначенное для определения первоначальной электрической нагрузки системы прицепа, для распознавания изменений электрической нагрузки и для подачи сигнала тревоги, если электрическая нагрузка по существу отличается от первоначальной электрической нагрузки. ЭБУ может быть применен для обнаружения попытки кражи прицепа. Кроме того, такой ЭБУ может включать в себя предохранительные устройства для обнаружения ложных электрических нагрузок, а также учета различных условий окружающей среды, которые могут вызвать ложное срабатывание системы тревожной сигнализации.
На Фиг.1 показан пример транспортного средства с прицепом. Система может иметь различные формы и включать в себя несколько указанных компонентов и/или альтернативные компоненты и оборудование. Показанные примеры компонентов не являются ограничивающими. Безусловно, могут быть применены дополнительные или альтернативные компоненты и/или варианты реализации.
На Фиг.1 показано буксирующее транспортное средство 100, имеющее электронный блок управления (ЭБУ) 105, а также механически и электрически соединенное с прицепом 110.
Буксирующее транспортное средство 100 может быть предназначено для преобразования энергии в движение с целью перевозки предметов или пассажиров. Следовательно, буксирующее транспортное средство 100 может представлять собой любой тип пассажирского или коммерческого автомобиля, например, легковой автомобиль, грузовой автомобиль, спортивный автомобиль, кроссовер, автофургон, минифургон, тягач, тягач с прицепом и тому подобное. Кроме того, буксирующее транспортное средство 100 может представлять собой другие типы транспортного средства, например, мотоцикл, локомотив или железнодорожный вагон. Хотя это не показано на Фиг.1, буксирующее транспортное средство 100 может иметь топливный бак, двигатель, силовую передачу и колеса. Во время работы указанные и возможные другие компоненты способствуют преобразованию энергии в движение.
ЭБУ 105 может включать в себя обрабатывающее устройство, предназначенное для осуществления одного или нескольких процессов, связанных с работой буксирующего транспортного средства 100. Как правило, ЭБУ 105 может быть предназначен для приема различных входных сигналов и подачи различных выходных сигналов в соответствии с полученными входными сигналами или выполняемыми компьютером командами, сохраненными в запоминающем устройстве (не показано). Кроме того, буксирующее транспортное средство 100 может включать в себя любое количество ЭБУ 105, предназначенных для управления работой любого количества систем транспортного средства, некоторые из которых описаны более подробно далее. Каждый ЭБУ 105 может включать в себя один или несколько модулей, предназначенных для реализации конкретной характеристики буксирующего транспортного средства 100. Как более подробно описано далее со ссылкой на Фиг.2, ЭБУ 105 может включать в себя блок 225 управления кузовными системами, предназначенный для управления одной или несколькими системами 215 транспортного средства, и блок 230 распознавания прицепа, предназначенный для распознавания наличия прицепа 110. Буксирующее транспортное средство 100 может включать в себя любое количество ЭБУ 105.
Прицеп 110 может представлять собой транспортное средство различных типов, выполненное с возможностью буксировки транспортным средством 100. В соответствии с одним вариантом прицеп 110 может быть механически соединен с буксирующим транспортным средством 100 посредством прицепного устройства 120 прицепа, прикрепленного к ходовой части буксирующего транспортного средства 100. Кроме того, электрическое соединение буксирующего транспортного средства 100 и прицепа 110 может быть выполнено с помощью электрического соединителя 115, который обеспечивает прием прицепом 110 сигналов от буксирующего транспортного средства 100, например, сигналов, которые могут быть сгенерированы ЭБУ 105. Прицеп 110 может включать в себя электронные компоненты, некоторые из которых могут быть предназначены для приема сигналов, передающихся через электрический соединитель 115. В соответствии с одним вариантом прицеп 110 может иметь тормозные фонари 125, указатели 130 поворота или оба указанных устройства, а также соответствующие электронные схемы или компоненты схемы, применяемые для управления тормозными фонарями 125 и указателями 130 поворота.
На Фиг.2 представлена блок-схема возможных компонентов, которые могут быть частью буксирующего транспортного средства 100 или прицепа 110. Как показано на Фиг.2, буксирующее транспортное средство 100 имеет источник 200 питания, человеко-машинный интерфейс 205, систему 210 тревожной сигнализации, по крайней мере одну систему 215 транспортного средства и систему 220 прицепа, соединенные с ЭБУ 105, который включает в себя блок 225 управления кузовными электронными системами и блок 230 распознавания прицепа.
Источник 200 питания может представлять собой устройство, предназначенное для подачи энергии на один или несколько компонентов буксирующего транспортного средства 100 или прицепа 110. В одном из вариантов источник 200 питания может представлять собой аккумулятор, предназначенный для преобразования химической энергии в электрическую энергию. Выдаваемая источником 200 питания электрическая энергия может представлять собой энергию постоянного тока. Более того, источник 200 питания может быть перезаряжаемым. Для ясности можно заметить, что источник 200 питания, показанный на Фиг.2, подает электрическую энергию на различные компоненты буксирующего транспортного средства 100 и прицепа 110 через ЭБУ 105. Источник 200 питания может быть также предназначен для подачи электрической энергии непосредственно на один или несколько других компонентов. Кроме того, буксирующее транспортное средство 100 или прицеп 110 может иметь любое количество источников 200 питания. Однако, как правило, источник 200 питания является элементом буксирующего транспортного средства 100.
Человеко-машинный интерфейс 205 может представлять собой устройство, предназначенное для предоставления информации пользователю, например, водителю или пассажиру транспортного средства, и получения входных сигналов от пользователя. В соответствии с одним возможным подходом человеко-машинный интерфейс 205 может иметь сенсорный дисплей, предназначенный для отображения одного или нескольких значков или других указателей различных выбираемых функций. Входные сигналы, поданные через человеко-машинный интерфейс 205, могут быть переданы в ЭБУ 105 для управления различными узлами транспортного средства. Например, входные сигналы, поданные через человеко-машинный интерфейс 205, могут быть использованы ЭБУ 105 для включения или отключения системы 210 тревожной сигнализации, управления климатом в транспортном средстве, взаимодействия с навигационной системой, управления проигрыванием медиафайлов и тому подобным.
В одном варианте человеко-машинный интерфейс 205 может отображать для пользователя меню подсоединения прицепа. Меню подсоединения прицепа может включать в себя различные функции, которые может выбрать пользователь. Возможные функции могут включать в себя функции выключения, включения и автоматического режима. Функция выключения («off») обеспечивает отсутствие реакции системы 210 тревожной сигнализации на сигналы, получаемые от блока 230 распознавания прицепа и, возможно, других блоков ЭБУ 105. Система 210 тревожной сигнализации и блок 230 распознавания прицепа более подробно описаны далее. Функция включения («on») обеспечивает наличие реакции системы 210 тревожной сигнализации на сигналы, получаемые от блока 230 распознавания прицепа ЭБУ 105. Функция автоматического режима («auto»), более подробно описанная далее, обеспечивает автоматический режим активации блока распознавания тревожной системы в определенных обстоятельствах, например, когда система 220 прицепа с предварительно заданными параметрами присоединена к транспортному средству.
Система 210 тревожной сигнализации может представлять собой любой тип устройства, предназначенного для выдачи сигналов, которые формируют воспринимаемое предупреждение. Система 210 тревожной сигнализации может быть активирована в соответствии с различными условиями, например, если злоумышленник попытается украсть буксирующее транспортное средство 100 или прицеп 110, как более подробно описано далее. В соответствии с одним вариантом система 210 тревожной сигнализации может управлять сиреной (не показана) в буксирующем транспортном средстве 100 для подачи звукового предупреждения. Система 210 тревожной сигнализации может также управлять фонарями (не показаны) буксирующего транспортного средства 100 для подачи визуального предупреждения. Еще одним способом, которым система 210 тревожной сигнализации может оповестить владельца буксирующего транспортного средства 100, является телекоммуникационная сеть. Иначе говоря, система 210 тревожной сигнализации может передавать сигналы о попытке кражи через сеть сотовой связи на мобильное устройство владельца. Система 210 тревожной сигнализации может осуществлять обмен данными с мобильными устройствами с помощью приложения, установленного на мобильное устройство или с помощью службы электронных сообщений, например, электронной почты, SMS, MMS и тому подобных. Кроме того, система 210 тревожной сигнализации может принимать сигналы от мобильного устройства, чтобы, например, отключить систему 210 тревожной сигнализации.
Система 210 тревожной сигнализации может работать в одной или нескольких фазах (режимах), например, фаза до приведения в готовность и фаза готовности. Во время фазы до приведения в готовность система 210 тревожной сигнализации может проверять наличие различных условий. Примерами условий может быть состояние, когда все двери и окна буксирующего транспортного средства 100 закрыты, когда ключ извлечен из замка зажигания, и когда заперты двери. Система 210 тревожной сигнализации может оставаться в отключенном режиме в течение заданного периода времени или пока не будут иметь место все указанные условия. После того, как система 210 тревожной сигнализации определила, что все условия имеют место, система 210 тревожной сигнализации может перейти в фазу готовности. Во время фазы готовности система 210 тревожной сигнализации может ожидать попытки несанкционированного проникновения или кражи буксирующего транспортного средства 100 или прицепа 110. Если попытка такого проникновения или кражи была обнаружена, система 210 тревожной сигнализации может выдать звуковой тревожный сигнал, и/или визуальный тревожный сигнал, и/или отправить сообщение на мобильное устройство пользователя. В одном возможном варианте система 210 тревожной сигнализации может сработать и подать сигнал тревоги после получения сигнала тревоги от блока 230 распознавания прицепа, как более подробно описано далее.
Система 215 транспортного средства может включать в себя один или несколько датчиков, установленных на буксирующем транспортном средстве 100, а сигналы, выдаваемые системой 215 транспортного средства, могут характеризовать состояние одного или нескольких компонентов буксирующего транспортного средства 100. Один тип датчиков может включать в себя датчик блокировки двери, определяющий, закрыта ли одна или несколько дверей буксирующего транспортного средства 100, или она заблокирована, или и то, и другое. Если это так, то датчик блокировки двери может выдавать сигнал, означающий, что одна или несколько дверей заблокированы. Другими типами датчиков могут быть датчик положения окна, определяющий, закрыто ли окно, датчик ящика для перчаток или задней двери, определяющий, закрыты ли ящик для перчаток или задняя дверь буксирующего транспортного средства 100, датчик капота, определяющий закрыт ли капот буксирующего транспортного средства 100, датчик замка зажигания, определяющий, находится ли ключ в замке зажигания буксирующего транспортного средства 100, и тому подобные. Сигналы, подаваемые системами 215 транспортного средства, могут быть переданы в ЭБУ 105 для обработки.
Система 220 прицепа может включать в себя один или несколько электронных компонентов, расположенных на прицепе 110. В соответствии с одним из возможных подходов система 220 прицепа может включать в себя сочетание тормозных фонарей 125, указателей 130 поворота и соответствующих электронных компонентов (например, схем), связанных с тормозными фонарями 125 и указателями 130 поворота. Один или несколько компонентов системы 220 прицепа может создавать электрическую нагрузку для источника 200 питания. Электрическая нагрузка системы 220 прицепа может быть пропорциональна или иным образом связана с количеством энергии, потребляемым одним или несколькими компонентами системы 220 прицепа. Таким образом, электрическая нагрузка может быть пропорциональна количеству энергии, потребляемому одним или несколькими тормозными фонарями 125, указателями 130 поворота или компонентами схемы, которые составляют систему 220 прицепа.
Блок 225 управления кузовными электронными системами может включать в себя обрабатывающее устройство, предназначенное для управления и контроля работы различных компонентов буксирующего транспортного средства 100. Например, блок 225 управления кузовными электронными системами может контролировать и управлять функциями, связанными с окнами, зеркалами, климатической системой, замками дверей и так далее. Как показано, блок 225 управления кузовными электронными системами включен в ЭБУ. В соответствии с некоторыми подходами функции блока 225 управления кузовными электронными системами могут быть выполнены ЭБУ 105 или другим блоком в буксирующем транспортном средстве 100. В других вариантах блок 225 управления кузовными электронными системами может быть установлен в обрабатывающем устройстве, отличном от ЭБУ.
Блок 230 распознавания прицепа может включать в себя обрабатывающее устройство, определяющее, имеет ли прицеп 110 электрическое соединение с буксирующим транспортным средством 100, на основании, например, электрической нагрузки от системы 220 прицепа. Блок 230 распознавания прицепа может измерять электрическую нагрузку от системы 220 прицепа в конкретные моменты времени, например, во время фазы отключенного состояния системы 210 тревожной сигнализации, с целью определения первоначальной электрической нагрузки. Если электрическая нагрузка не равна нулю, то блок 230 распознавания прицепа может определить, что прицеп 110 в данный момент имеет электрическое соединение с буксирующим транспортным средством 100. Как более подробно описано далее, первоначальная электрическая нагрузка может быть преобразована в пороговое значение или диапазон пороговых значений, включая минимальное пороговое значение и максимальное пороговое значение. Эти пороговые значения могут быть применены для определения, был ли прицеп 110 несанкционированно отсоединен от буксирующего транспортного средства 110, пока система 210 тревожной сигнализации находилась в фазе готовности. Применение максимального порогового значения может позволить блоку 230 распознавания прицепа потенциально препятствовать попыткам создать ложную нагрузку, предназначенную для того, чтобы ввести в заблуждение блок 230 распознавания прицепа, позволив ему ошибочно распознать систему 220 прицепа, когда таковая на самом деле отсутствует.
Для повышения точности распознавания, которая также может способствовать потенциальному предотвращению попыток ввести в заблуждение блок 230 распознавания прицепа, блок 230 распознавания прицепа может периодически измерять электрическую нагрузку системы 220 прицепа через заранее заданные интервалы времени в течение фазы отключенного состояния. Пороговое значение или диапазон пороговых значений может быть основано на усредненных значениях измеренных электрических нагрузок, измеренных во время фазы отключенного состояния, вместо одиночного измерения электрической нагрузки.
Кроме того, блок 230 распознавания прицепа может обнаруживать изменения электрической нагрузки, вызванные допустимыми факторами, например, температурой, влажностью, сыростью и т.д., в отличие от попыток кражи. Например, блок 230 распознавания прицепа может продолжать измерять электрическую нагрузку во время фазы готовности и при необходимости корректировать пороговое значение или диапазон пороговых значений. В одном варианте относительно незначительные изменения электрической нагрузки, измеренной во время фазы готовности, могут означать, что на электрическую нагрузку повлиял один из допустимых факторов, указанных выше. И наоборот, резкое падение электрической нагрузки может означать попытку кражи прицепа 110, даже если данная электрическая нагрузка после данного резкого падения была относительно быстро восстановлена, что может говорить о попытках злоумышленника создать ложную электрическую нагрузку.
Блок 230 распознавания прицепа может также отслеживать различные состояния буксирующего транспортного средства 100, прицепа 110 или обоих транспортных средств, чтобы определить, должна ли сработать система 210 тревожной сигнализации. В случае если блок 230 распознавания прицепа определяет, что система 210 тревожной сигнализации должна сработать, например, если блок 230 распознавания прицепа определяет, что злоумышленник пытается попасть внутрь буксирующего транспортного средства 100 или украсть прицеп 110, то блок 230 распознавания прицепа может подать сигнал тревоги на систему 210 тревожной сигнализации. При обнаружении несанкционированного проникновения или потенциальной кражи блок 230 распознавания прицепа может направить сигнал тревоги на систему 210 тревожной сигнализации таким образом, чтобы мог быть подан звуковой и/или визуальный сигнал тревоги.
Блок 230 распознавания прицепа может получать информацию о конкретных компонентах буксирующего транспортного средства 100 и прицепа 110 и использовать полученную информацию для подачи сигнала тревоги. Например, блок 230 распознавания прицепа может определить с помощью блока 225 управления кузовными электронными системами, закрыты ли окна и двери буксирующего транспортного средства 100. Во время фазы готовности блок 230 распознавания прицепа может отслеживать электрическую нагрузку системы 220 прицепа для того, чтобы установить текущее значение электрической нагрузки. Электрическая нагрузка может быть проверена через равные промежутки времени, например, через каждые 50 мс. Блок 230 распознавания прицепа может сравнивать первоначальную электрическую нагрузку системы 220 прицепа, измеренную во время фазы отключенного состояния, с текущей электрической нагрузкой, измеряемой, например, через каждые 50 мс во время фазы готовности, и подавать сигнал тревоги, если электрическая нагрузка по существу отлична от первоначальной электрической нагрузки. В некоторых примерах блок 230 распознавания прицепа может генерировать и выдавать сигнал тревоги, если отслеживаемая электрическая нагрузка по существу отлична от первоначальной или заданной электрической нагрузки или заданное количество раз в течение определенного периода времени. Например, блок 230 распознавания прицепа может генерировать сигнал тревоги, если отличие отслеживаемой электрическая нагрузки от первоначального или измеренного значения было обнаружено по крайней мере четыре раза в течение, например, 200 мс.
В некоторых вариантах блок 230 распознавания прицепа может обнаруживать изменения электрической нагрузки в течение фазы готовности, только если блок 230 распознавания прицепа определяет наличие системы 220 прицепа. Если это так, что блок 230 распознавания прицепа может отслеживать и обнаруживать изменения электрической нагрузки системы 220 прицепа. Если прицеп 110 не обнаружен, то блок 230 распознавания прицепа может автоматически перейти в состояние выключения, описанное выше.
Блок 230 распознавания прицепа может быть выполнен таким образом, чтобы определять минимальное пороговое значение, максимальное пороговое значение или оба этих значения на основании, по крайней мере частично, первоначального значения электрической нагрузки. Минимальное пороговое значение и максимальное пороговое значение могут быть определены таким образом, что первоначальная электрическая нагрузка будет представлять собой среднюю величину от минимального и максимального пороговых значений. Как вариант, блок 230 распознавания прицепа может установить минимальное пороговое значение равным первоначальной электрической нагрузке, и определить максимальное пороговое значение в качестве заранее заданной величины, превышающей минимальное пороговое значение. В соответствии с другим подходом блок 230 распознавания прицепа может установить максимальное пороговое значение равным первоначальной электрической нагрузке и определить минимальное пороговое значение в качестве заранее заданной величины, не превышающей максимальное пороговое значение. Блок 230 распознавания прицепа может также определять диапазон пороговых значений от минимального и максимального пороговых значений. В одном варианте блок 230 распознавания прицепа может задавать пороговые значения или диапазон пороговых значений на основании электрической нагрузки, измеренной во время фазы отключенного состояния.
Блок 230 распознавания прицепа может периодически отслеживать электрическую нагрузку системы 220 прицепа во время фазы включенного состояния. Блок 230 распознавания прицепа может сравнивать отслеживаемую электрическую нагрузку с первоначальной электрической нагрузкой. Иными словами, блок 230 распознавания прицепа может сравнивать отслеживаемую электрическую нагрузку с минимальным пороговым значением, максимальным пороговым значением или обоими этими значениями. Если отслеживаемая электрическая нагрузка по существу отличается от первоначального значения, что может иметь место, если отслеживаемая электрическая нагрузка не превышает минимальное пороговое значение или превышает максимальное пороговое значение, то блок 230 распознавания прицепа может генерировать и подавать сигнал тревоги на систему 210 тревожной сигнализации.
Состояние блока 230 распознавания прицепа может быть, например, выбрано пользователем с помощью человеко-машинного интерфейса 205, который может отображать для пользователя меню подсоединения прицепа. Если пользователь выбирает функцию выключения, то блок 230 распознавания прицепа может быть отключен. Если пользователь выбирает функцию включения, то блок 230 распознавания прицепа может измерять первоначальную электрическую нагрузку в течение фазы отключенного состояния и отслеживать электрическую нагрузку системы 220 прицепа в течение фазы готовности, как описано ранее. Если пользователь выбирает функцию автоматического режима, то блок 230 распознавания прицепа может определить, находится ли первоначальная электрическая нагрузка в пределах заранее заданных системных параметров, которые могут быть связаны с известными системами 220 прицепа. Если это так, то блок 230 распознавания прицепа может начать отслеживать электрическую нагрузку системы 220 прицепа в течение фазы готовности так, как если бы пользователь выбрал функцию включения. Если это не так, то блок 230 распознавания прицепа может не принимать во внимание электрическую нагрузку системы 220 прицепа так, как если бы пользователь выбрал выключенный режим.
В одном возможном варианте блок 230 распознавания прицепа может измерять электрическую нагрузку системы 220 прицепа даже после генерирования сигнала тревоги, который приводит к срабатыванию системы 210 тревожной сигнализации, чтобы подтвердить необходимость срабатывания системы 210 тревожной сигнализации. Если блок 230 распознавания прицепа подтверждает необходимость срабатывания системы 210 тревожной сигнализации, то система 210 тревожной сигнализации может принять сигнал тревоги, отправленный ей блоком 230 распознавания прицепа. Если блок 230 распознавания прицепа определяет, что сигнал тревоги был выдан ошибочно, то блок 230 распознавания прицепа может принять меры по отмене сигнала тревоги. Такие меры могут включать в себя команды для системы 210 тревожной сигнализации о том, чтобы система 210 тревожной сигнализации не принимала во внимание сигнал тревоги, или подачу на систему 210 тревожной сигнализации сигнала, отменяющего сигнал тревоги.
В некоторых вариантах реализации одна или несколько функций блока 230 распознавания прицепа могут быть выполнены ЭБУ 105 или другим блоком в буксирующем транспортном средстве 100. В других вариантах блок 230 распознавания прицепа может быть установлен в обрабатывающем устройстве, отличном от ЭБУ.
Как правило, компьютерные системы и/или устройства, такие как ЭБУ 105, человеко-машинный интерфейс 205, система 210 тревожной сигнализации и система 215 транспортного средства, могут применять какую-либо компьютерную операционную систему, включая, но не ограничиваясь перечисленным, версии и/или разновидности операционной системы Microsoft Windows®, операционную систему Unix (например, операционную систему Solaris®, распространяемую Oracle Corporation, г. Редвуд Шорз, Калифорния), операционную систему AIX UNIX, распространяемую компанией International Business Machines, г. Армонк, Нью-Йорк, операционную систему Linux, операционные системы Mac OS X и iOS, распространяемые компанией Apple Inc., г. Купертино, Калифорния, операционную систему BlackBerry, распространяемую компанией Research In Motion, г. Ватерлоо, Канада, и операционную систему Android, разработанную компанией Open Handset Alliance.
Вычислительные устройства, как правило, включат в себя выполняемые компьютером команды, при этом данные команды могут быть выполнены одним или несколькими вычислительными устройствами. Выполняемые компьютером команды могут быть получены в результате компиляции или интерпретации компьютерных программ, созданных с помощью различных языков и/или технологий программирования, включая, но не ограничиваясь перечисленным, Java™, C, C++, Visual Basic, Java Script, Perl, и так далее, при этом может быть использован как один из перечисленных языков, так и их сочетания. Как правило, процессор (например, микропроцессор) получает команды, например, от запоминающего устройства, машиночитаемого носителя и так далее, и выполняет данные команды, тем самым реализуя один или несколько процессов, включая один или несколько процессов, изложенных в данном описании изобретения. Эти команды и другие данные можно хранить и передавать с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (также называемый как считываемый процессором носитель) представляет собой носитель, предназначенный для долговременного хранения (например, материальный носитель), который участвует в предоставлении данных (например, команд), которые могут быть считаны компьютером (например, процессором компьютера). Данный носитель может иметь различные формы, включая, но не ограничиваясь, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут представлять собой, например, накопители на оптических или магнитных дисках и другие постоянные запоминающие устройства. Энергозависимые носители могут представлять собой, например, динамическое оперативное запоминающее устройство (ЗУ), которое, как правило, составляет основное запоминающее устройство. Данные команды могут быть переданы с помощью одного или нескольких средств передачи данных, включая коаксиальные кабели, медные провода, оптоволоконные кабели, включая провода, которые составляют системную шину, подсоединенную к процессору компьютера. Стандартными формами машиночитаемых носителей, являются, например, гибкий магнитный диск, жесткий магнитный диск, накопитель на магнитной ленте, любой другой магнитный носитель, ПЗУ на компакт-дисках, DVD, любой другой оптический носитель, перфорированные карты, бумажная перфолента, любой другой физический носитель с конфигурацией пробивок, ОЗУ, ППЗУ, ЭППЗУ, флэш-ППЗУ, любая другая ИС памяти или плата памяти или любой другой носитель, с которого компьютер может считывать данные.
Базы данных, хранилища данных или другие устройства для хранения данных, изложенные в данном описании изобретения, могут включать в себя различные типы механизмов хранения, получения доступа к и восстановления различных типов данных, включая иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в закрытом формате, реляционную систему управления базами данных (РСУБД) и так далее. Каждое такое устройство для хранения данных, как правило, включено в вычислительное устройство, применяющее компьютерную операционную систему, например, одну из вышеупомянутых систем, и доступ к такому устройству для хранения данных может быть воплощен посредством сети одним или несколькими способами. Доступ к файловой системе может быть воплощен с помощью компьютерной операционной системы, при этом файловая система может хранить файлы различных форматов. В РСУБД, как правило, применяют язык структурированных запросов (SQL) в дополнение к языку, используемому для создания, хранения, редактирования и выполнения хранимых процедур, например языку PL/SQL, упомянутому выше.
В некоторых примерах системные элементы могут быть реализованы в качестве машиночитаемых команд (например, программное обеспечение) на одном или нескольких вычислительных устройств (например, серверах, персональных компьютерах и так далее), сохраненных на соответствующих машиночитаемых носителях (например, дисках, запоминающих устройствах и так далее). Программный продукт для компьютера может включать в себя данные команды, сохраненные на машиночитаемом носителе для выполнения функций, изложенных в данном описании изобретения.
На Фиг.3 представлена диаграмма 300, иллюстрирующая примеры измерений электрических нагрузок 305, которые могут быть измерены во время фазы 310 отключенного состояния, а также диапазон пороговых значений, который может быть создан во время фазы 315 готовности. Как показано на Фиг.3, фаза 310 отключенного состояния может быть начата в точке t=0 и закончена в точке t=20 с. Продолжительность фазы отключенного состояния является примерной и в некоторых примерах воплощения может быть регулируемой. Во время фазы 310 отключенного состояния блок 230 распознавания прицепа может совместно с блоком 225 управления кузовными электронными системами подтвердить, что различные компоненты буксирующего транспортного средства 100 подготовлены для приведения в готовность системы 210 тревожной сигнализации. Например, блок 230 распознавания прицепа может подтвердить на основании информации, полученной от блока 225 управления кузовными электронными системами, что все двери и окна буксирующего транспортного средства 100 закрыты. В течение фазы 310 отключенного состояния блок 230 распознавания прицепа может измерять электрическую нагрузку 305 системы 220 прицепа, например, тормозных фонарей 125 прицепа 110, чтобы установить исходный уровень первоначальной электрической нагрузки, показанный пунктирной линией 320. Измерения значения электрической нагрузки могут быть выполнены, например, через каждые 50 мс. Для ясности на Фиг.3 представлено лишь несколько измеренных значений. В конце фазы 310 отключенного состояния блок 230 распознавания прицепа может определить диапазон пороговых значений или минимальное или максимальное пороговые значения 325 и 330 соответственно на основании первоначального или измеренного значения электрической нагрузки 305.
По окончании фазы 310 отключенного состояния система 210 тревожной сигнализации переходит в фазу 315 готовности, показанную в точке t=20 с. Во время фазы 315 готовности блок 230 распознавания прицепа может отслеживать электрическую нагрузку 305 системы 220 прицепа. Если отслеживаемая электрическая нагрузка 305 либо превышает максимальное пороговое значение 330, либо не превышает минимальное пороговое значение 325, то блок 230 распознавания прицепа может сгенерировать и подать сигнал тревоги на систему 210 тревожной сигнализации. В некоторых вариантах блок 230 распознавания прицепа может сгенерировать и подать сигнал тревоги, если отслеживаемая электрическая нагрузка 305, которую может отслеживать блок 230 распознавания прицепа, например, через каждые 50 мс во время фазы готовности, отлична от первоначальной электрической нагрузки 305, которая может быть измерена во время фазы 310 отключенного состояния. Кроме того, как показано на Фиг.3, сигнал тревоги может быть подан, если заранее заданное количество раз было установлено, что значение электрической нагрузки 305 находится вне пределов минимального или максимального пороговых значений 325 и 330 соответственно (например, четыре раза в примере, показанном на Фиг.3). Запрос значения электрической нагрузки 305 через равные промежутки времени позволяет экономить энергию аккумулятора по сравнению с режимом, когда значение электрической нагрузки 305 отслеживают постоянно.
Фиг.4 представляет собой блок-схему примерного процесса 400, который может быть воплощен электронным блоком управления (ЭБУ) 105 и в частности, блоком 230 распознавания прицепа.
На этапе 405 блок 230 распознавания прицепа может отключить измерение электрической нагрузки системы 220 прицепа. Например, могут возникнуть ситуации, когда измерение электрической нагрузки не требуются, например, когда наличие прицепа 110 не обнаружено или когда пользователь отключил систему 210 тревожной сигнализации с помощью, например, человеко-машинного интерфейса 205.
На этапе 410 ветвления блок 230 распознавания прицепа может определить, была ли отключена система 210 тревожной сигнализации. Например, блок 230 распознавания прицепа может получить через человеко-машинный интерфейс 205 указание от пользователя отключить систему 210 тревожной сигнализации. Если это так, то процесс 400 может вернуться на этап 405, чтобы отключить измерение электрической нагрузки. Если на этапе 410 не получено никакого входного сигнала от пользователя, то процесс 400 может быть продолжен на этапе 415.
На этапе 415 блок 230 распознавания прицепа может включить измерение электрической нагрузки. Если такое измерение включено, то процесс 400 может перейти на этап 420, где определяют наличие системы 220 прицепа и, следовательно, прицепа 100.
На этапе 420 принятия решений блок 230 распознавания прицепа может определить, присутствует ли система 220 прицепа и присоединена ли она к буксирующему транспортному средству 100. В соответствии с одним примерным подходом блок 230 распознавания прицепа может определить наличие системы 220 прицепа с помощью попытки измерить электрическую нагрузку системы 220 прицепа, которая, как было изложено ранее, может включать в себя электрическую нагрузку тормозных фонарей 125 прицепа 110. Распознавание системы 220 прицепа может иметь место до приведения в готовность системы 210 тревожной сигнализации буксирующего транспортного средства 100. Если система 220 прицепа присутствует, то процесс 400 может быть продолжен на этапе 425. Если система 220 прицепа отсутствует, то процесс 400 может быть возвращен на этап 405, пока система 220 прицепа не будет распознана.
На этапе 425 блок 230 распознавания прицепа может определить первоначальную электрическую нагрузку системы 220 прицепа. Блок 230 распознавания прицепа может измерять электрическую нагрузку системы 220 прицепа во время фазы отключенного состояния с целью определения первоначальной электрической нагрузки. Вместо одиночного измерения блок 230 распознавания прицепа может периодически измерять электрическую нагрузку системы 220 прицепа через заранее заданные интервалы времени в течение фазы отключенного состояния (например, до того, как система 210 тревожной сигнализации будет приведена в готовность) с целью определения первоначальной электрической нагрузки.
На этапе 430 блок 230 распознавания прицепа может определить минимальное пороговое значение, максимальное пороговое значение или оба данных значения на основании первоначальной или измеренной электрической нагрузки, определенной на этапе 425. Минимальное и максимальное пороговые значения могут быть определены таким образом, что первоначальная или измеренная электрическая нагрузка будет представлять собой среднюю величину от минимального и максимального пороговых значений. Как вариант блок 230 распознавания прицепа может установить минимальное пороговое значение, равным первоначальной или измеренной электрической нагрузке, и максимальное пороговое значение в качестве какой-либо величины, превышающей минимальное пороговое значение. В соответствии с другим возможным подходом блок 230 распознавания прицепа может установить максимальное пороговое значение равным первоначальной или измеренной электрической нагрузке, и минимальное пороговое значение в качестве какой-либо величины, не превышающей максимальное пороговое значение. Кроме того, блок 230 распознавания прицепа может также определить диапазон пороговых значений от минимального и максимального пороговых значений.
На этапе 435 блок 230 распознавания прицепа может отслеживать электрическую нагрузку системы 220 прицепа после того, как система 210 тревожной сигнализации была приведена в готовность. Иными словами, этап 435 может быть выполнен во время фазы готовности. Во время фазы готовности блок 230 распознавания прицепа может периодически измерять электрическую нагрузку системы 220 прицепа и при необходимости уточнять минимальное пороговое значение, максимальное пороговое значение или оба данных значения на основании, по крайней мере частично, электрической нагрузки, измеренной после того, как система 210 тревожной сигнализации была приведена в готовность. Как было изложено выше, такие факторы, как температура, влажность, сырость и так далее, могут вызвать относительно незначительные изменения электрической нагрузки. Блок 230 распознавания прицепа может расценивать данные относительно незначительные изменения как изменения, вызванные допустимыми факторами окружающей среды, и не как кражу. Следовательно, пороговые значения могут быть уточнены соответствующим образом.
На этапе 440 блок 230 распознавания прицепа может обнаруживать изменения электрической нагрузки системы 220 прицепа после того, как система 210 тревожной сигнализации была приведена в готовность. Например, блок 230 распознавания прицепа может отслеживать электрическую нагрузку системы 220 прицепа с целью обнаружения изменений. В то время как относительно незначительные изменения могут быть вызваны факторами окружающей среды, как изложено выше, значительные изменения электрической нагрузки могут означать попытку кражи прицепа 110. Обнаружение изменений электрической нагрузки может включать в себя отслеживание электрической нагрузки и сравнение отслеживаемой электрической нагрузки с минимальным пороговым значением, максимальным пороговым значением или обоими этими значениями.
На этапе 445 ветвления блок 230 распознавания прицепа может определить, находится ли отслеживаемая электрическая нагрузка вне пределов диапазона пороговых значений, то есть превышает ли она максимальное пороговое значение или находится ниже минимального порогового значения. Если это так, то процесс 400 может быть продолжен на этапе 450. Если это не так, то процесс 400 может быть возвращен на этап 435.
На этапе 450 принятия решений блок 230 распознавания прицепа может выдать сигнал тревоги, если отслеживаемая электрическая нагрузка не превышает минимальное пороговое значение или превышает максимальное пороговое значение. В некоторых примерах перед передачей сигнала тревоги, которая может иметь место на этапе 455, блок 230 распознавания прицепа может измерить электрическую нагрузку системы 220 прицепа, чтобы подтвердить, что отслеживаемая электрическая нагрузка действительно по существу отлична от первоначального значения. Процесс 400 может быть продолжен на этапе 455, если блок 230 распознавания прицепа определит, что измеренная электрическая нагрузка по существу отлична от первоначального значения с помощью заранее заданного числа последовательных измерений, например, четырех последовательных измерений.
На этапе 455 блок 230 распознавания прицепа может вызвать срабатывание системы 210 тревожной сигнализации путем подачи сигнала тревоги на систему 210 тревожной сигнализации. При получении сигнала тревоги система 210 тревожной сигнализации может подать звуковую и/или визуальную индикацию тревоги для того, чтобы предупредить владельца о попытке кражи прицепа 110. В дополнение к этому или в качестве варианта система 210 тревожной сигнализации может отправить сообщение на мобильное устройство владельца, уведомляющее владельца о попытке кражи. После этого процесс 400 завершается на этапе 455.
Следует понимать, что несмотря на то, что этапы описанных процессов были описаны как происходящие в определенной упорядоченной последовательности, процессы, системы, способы, эвристические правила, изложенные в данном описании изобретения, могут быть реализованы в порядке, отличном от порядка, изложенного в данном описании изобретения. Следует также понимать, что конкретные этапы могут быть выполнены одновременно, что другие этапы могут быть добавлены, и что некоторые описанные этапы могут быть опущены. Другими словами, описания процессов в данном документе приведены в целях иллюстрации конкретных вариантов реализации изобретения и не могут быть рассмотрены как ограничивающие.



Изобретение относится к электронным управляющим устройствам транспортных средств. Способ распознавания кражи прицепа транспортного средства содержит этапы, на которых определяют электрическую нагрузку системы прицепа до приведения в готовность системы тревожной сигнализации транспортного средства и выявляют изменения электрической нагрузки после приведения в готовность системы тревожной сигнализации. Система тревожной сигнализации срабатывает, если электрическая нагрузка существенно отличается от значения до приведения в готовность системы тревожной сигнализации. Достигается повышение защищенности прицепа транспортного средства от угона. 2 н. и 8 з.п. ф-лы, 4 ил.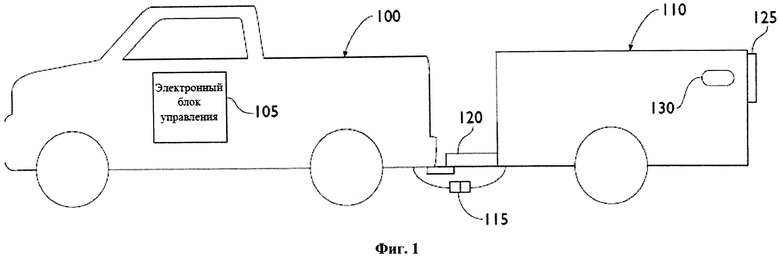
1. Способ распознавания кражи прицепа транспортного средства, в котором определяют электрическую нагрузку системы прицепа до приведения в готовность системы тревожной сигнализации транспортного средства, выявляют изменения электрической нагрузки после приведения в готовность системы тревожной сигнализации и инициируют срабатывание системы тревожной сигнализации, если электрическая нагрузка существенно отличается от значения электрической нагрузки до приведения в готовность системы тревожной сигнализации.
2. Способ по п.1, в котором дополнительно отслеживают электрическую нагрузку после приведения в готовность системы тревожной сигнализации транспортного средства.
3. Способ по п.1, в котором до приведения в готовность системы тревожной сигнализации дополнительно определяют, присутствует ли система прицепа и присоединена ли она к транспортному средству, и если система прицепа имеется, проверяют, изменилась ли электрическая нагрузка после приведения в готовность системы тревожной сигнализации.
4. Способ по п.1, в котором дополнительно определяют минимальное пороговое значение и/или максимальное пороговое значение на основании, по крайней мере частично, электрической нагрузки, установленной до приведения в готовность системы тревожной сигнализации, где для обнаружения изменений электрической нагрузки отслеживают значение электрической нагрузки и сравнивают отслеживаемое значение с минимальным пороговым значением и/или максимальным пороговым значением, причем подачу сигнала тревоги инициируют, если отслеживаемое значение электрической нагрузки меньше минимального порогового значения или больше максимального порогового значения.
5. Способ по п.4, в котором дополнительно определяют диапазон пороговых значений от минимального и максимального пороговых значений.
6. Электронный блок управления для выполнения способа по п.1, который содержит обрабатывающее устройство, выполненное с возможностью определять первоначальную электрическую нагрузку системы прицепа, обнаруживать изменения электрической нагрузки и обеспечивать подачу сигнала тревоги, если электрическая нагрузка по существу отличается от первоначальной электрической нагрузки.
7. Электронный блок управления по п.6, в котором обрабатывающее устройство выполнено с возможностью измерять электрическую нагрузку системы прицепа во время фазы отключенного состояния системы тревожной сигнализации, а также отслеживать электрическую нагрузку во время фазы готовности системы тревожной сигнализации.
8. Электронный блок управления по п.6, в котором обрабатывающее устройство выполнено с возможностью определять присутствие системы прицепа во время фазы отключенного состояния системы тревожной сигнализации и при наличии системы прицепа обнаруживать изменения электрической нагрузки во время фазы готовности системы тревожной сигнализации.
9. Электронный блок управления по п.6, в котором обрабатывающее устройство выполнено с возможностью определять минимальное пороговое значение и/или максимальное пороговое значение на основании, по крайней мере частично, первоначальной электрической нагрузки, и сравнивать отслеживаемую электрическую нагрузку с минимальным и/или максимальным пороговым значением; а также обеспечивать подачу сигнала тревоги, если отслеживаемая электрическая нагрузка меньше минимального порогового значения или больше максимального порогового значения.
10. Электронный блок управления по п.9, в котором обрабатывающее устройство выполнено с возможностью определять диапазон пороговых значений от минимального и максимального пороговых значений.
| Колосоуборка | 1923 |
|
SU2009A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ СЦЕПНОГО УСТРОЙСТВА ДЛЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2009 |
|
RU2467896C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

