Область техники, к которой относится изобретение
Изобретение относится к электромагнитно-акустическому преобразователю для ультразвукового контроля образцов из электропроводящего материала, а также к устройству для ультразвукового контроля, включающему, по меньшей мере, один такой электромагнитно-акустический преобразователь.
Уровень техники
Ультразвуковой контроль - это неразрушающий акустический метод испытаний для контроля образцов из звукопроводящих материалов, например, металлов. В особенности привлекательной для многих применений ультразвукового контроля является возможность обнаружения внутренних дефектов, лежащих и под поверхностью испытуемого образца. В традиционных системах контроля с помощью ультразвука используемые для контроля ультразвуковые волны возбуждаются пьезоэлектрическим преобразователем и через передающую среду, например, через воду, вводятся в образец.
Электромагнитно-акустические преобразователи, ЭМАП (Electro Magnetic Acoustic Transducers, EMATs), представляют собой альтернативу указанной традиционной ультразвуковой технологии и могут применяться для контроля всех достаточно электропроводящих материалов. С помощью электромагнитно-акустического преобразователя, который далее будет также обозначаться аббревиатурой ЭМАП, ультразвуковые волны электромагнитным способом возбуждаются непосредственно в материале испытуемого образца. Для этого в ЭМАП имеются магнитная система, создающая магнитное поле, проникающее в образец, и блок катушек индуктивности для создания в образце накладывающегося на это магнитное поле переменного электромагнитного поля, а также для регистрации излучаемых образцом переменных электромагнитных полей. Возбуждаемый высокочастотным переменным напряжением блок катушек индуктивности создает в приповерхностном слое образца вихревые токи. При этом подвижные носители заряда движутся в магнитном поле, созданном в образце магнитной системой. Возникающая при этом сила Лоренца воздействует как периодическая сила на твердотельную структуру материала испытуемого образца и таким образом создает непосредственно внутри испытуемого образца ультразвуковые волны, которые распространяются в материале образца и могут быть использованы для его контроля. Ультразвуковой контроль с использованием ЭМАП осуществляется, таким образом, принципиально без передающей среды, в частности воды, так что эта технология ЭМАП может применяться, например, и для контроля металлов в горячем состоянии. Ультразвуковой контроль с использованием ЭМАП может применяться как для дефектоскопии металлов и металлических сплавов, так и для определения геометрических параметров, например, толщины стенки, диаметра и т.д., образцов из электропроводящего материала.
В документе DE 112005000106 Т5 (соответствующем WO 2005/083419) описан традиционный электромагнитно-акустический преобразователь, включающий корпус с обращенной к испытуемому образцу рабочей поверхностью. В корпусе размещены магнитная система с постоянными магнитами для создания поля постоянного магнита, а также - вблизи рабочей поверхности - блок катушек индуктивности для электромагнитного возбуждения сканирующих импульсов и приема импульсов, излучаемых образцом. Магнитная система содержит, по меньшей мере, три постоянных магнита, имеющих прямоугольное сечение и расположенных в корпусе непосредственно рядом друг с другом параллельно рабочей поверхности ЭМАП. При этом полюса среднего магнита расположены вертикально относительно рабочей поверхности, в то время как полюса каждого из соседних с ним боковых магнитов расположены горизонтально. Между постоянными магнитами магнитной системы и блоком катушек размещены концентраторы магнитного потока, причем так, что магнитный поток, создаваемый средним магнитом, концентрируется на каждой из катушек индуктивности, размещенных под концентраторами. ЭМАП такой конструкции должен иметь высокую чувствительность и довольно широкий рабочий диапазон - и в то же время быть компактным.
В документе WO 2007/13836 А1 описан электромагнитно-акустический преобразователь с наружным корпусом и размещенным внутри наружного корпуса внутренним корпусом. Во внутреннем корпусе размещена магнитная система с несколькими постоянными магнитами. На несущей пластине наружного корпуса расположены блок катушек индуктивности и соответствующие концентраторы магнитного поля, причем так, что в рабочем положении внутреннего корпуса создаваемое магнитной системой поле постоянного магнита концентрируется на блоке катушек. Внутренний корпус размещен внутри наружного корпуса с возможностью движения, так что он с помощью расположенного на наружном корпусе привода может быть сдвигом или поворотом выведен из рабочего положения (контакта по магнитному потоку с блоком катушек), в результате чего ЭМАП отключается. Таким образом, должно быть возможно быстро снять преобразователь с испытуемого образца, и поле магнитной системы мешать этому не будет.
Чтобы достичь высокой чувствительности контроля, блок катушек индуктивности в процессе контроля должен находиться как можно ближе к поверхности испытуемого образца. Для защиты блока катушек в известных электромагнитно-акустических преобразователях перед блоком катушек, то есть между блоком катушек и поверхностью испытуемого образца, помещается защитное приспособление из износостойкого материала, например, в виде защитной керамической пластины. Чтобы не увеличивать больше, чем необходимо, расстояние между образцом и катушками блока катушек, слой защитного материала должен иметь малую толщину. В качестве еще одного граничного условия материал должен иметь незначительную электропроводность, что обусловлено принципиальной основой способа возбуждения ультразвука.
Как правило, электромагнитно-акустические преобразователи применяются в составе испытательного стенда с целью автоматизации процесса контроля. При этом ЭМАП проводится по поверхности испытуемого образца таким образом, чтобы можно было охватить всю контролируемую зону испытуемого образца. В промышленном применении желательно при этом как можно более сократить время контроля, чтобы достичь максимально возможного выхода проверенного материала. Поэтому стремятся к сравнительно высоким скоростям ЭМАП относительно материала испытуемого образца.
При контроле ферромагнитных материалов могут возникать сравнительно большие силы магнитного притяжения между испытуемым образцом и проводимым вдоль поверхности испытуемого образца преобразователем ЭМАП, что в случае скользящего контакта между ЭМАП и поверхностью испытуемого образца может приводить к повышенному износу защитного элемента, особенно при сравнительно высоких относительных скоростях.
В качестве альтернативы сканирование поверхности испытуемого образца может производиться бесконтактно - с сохранением между поверхностью испытуемого образца и ЭМАП небольшого воздушного зазора, который должен быть, по меньшей мере, такого размера, чтобы столкновения ЭМАП с материалом испытуемого образца, вызванные, например, неровностью поверхности испытуемого образца, не происходили или происходили редко. Однако всякое увеличение расстояния между поверхностью испытуемого образца и блоком катушек связано с резким падением чувствительности контроля.
Раскрытие изобретения
Задача изобретения заключается в создании такого электромагнитно-акустического преобразователя для ультразвукового контроля, который позволяет сканировать испытуемый образец с высокой относительной скоростью, но без существенных ограничений, связанных со сроком службы ЭМАП или чувствительностью контроля.
Для решения вышеуказанной задачи изобретение предлагает электромагнитно-акустический преобразователь с признаками п.1 формулы. Предпочтительные варианты раскрыты в зависимых пунктах формулы. Полный текст формулы изобретения включен в описание посредством ссылки.
Электромагнитный акустический преобразователь согласно изобретению содержит магнитную систему для создания магнитного поля, которое должно проникать в испытуемый образец, и блок катушек индуктивности для создания накладывающегося на магнитное поле в образце переменного электромагнитного поля и для регистрации излучаемых образцом переменных электромагнитных полей. Магнитная система размещена в намагничивающем узле, а блок катушек - в узле зонда, отделенном от намагничивающего узла. Узел зонда размещается в области магнитного поля с возможностью перемещения относительно намагничивающего узла.
Узел зонда не связан жестко с намагничивающим узлом, а может перемещаться относительно него, так что при работе преобразователя узел зонда может приближаться к намагничивающему узлу или удаляться от него. В частности, между намагничивающим узлом и узлом зонда может находиться незаполненное материалом пространство переменных размеров, которое может менять свой размер или толщину, когда два эти узла движутся относительно друг друга. Благодаря этому контроль ферромагнитного материала может осуществляться с высокой чувствительностью и малой нагрузкой износа при сохранении скользящего контакта между узлом зонда и поверхностью испытуемого образца, так как сильное магнитное притяжение между намагничивающим узлом и ферромагнитным испытуемым материалом не влияет - или очень мало влияет - на ту силу, которая прижимает узел зонда к поверхности испытуемого образца.
Вследствие подвижности узла зонда относительно намагничивающего узла или вследствие отсутствия жесткой связи узла зонда с намагничивающим узлом, перемещаемая при проходе неровностей поверхности масса может быть сравнительно малой, так что узел зонда может без затруднений следовать рельефу поверхности, не вызывая возникновения чрезмерных инерционных сил, которые могли бы привести к износу или даже разрушению преобразователя.
В частности, в производственной обстановке контроль зачастую приходится проводить в неблагоприятных окружающих условиях, например, на еще горячих испытуемого образцах с покрытой окалиной поверхностью. Для таких применений предпочтительны варианты осуществления, в которых между намагничивающим узлом и узлом зонда имеется промежуточное пространство переменных размеров, причем это промежуточное пространство герметизировано от загрязнений с помощью гибкой оболочки. Тем самым может быть предотвращено проникновение загрязнений в промежуточное пространство между намагничивающим узлом и узлом зонда при одновременном обеспечении подвижности двух этих узлов относительно друг друга. Гибкая оболочка может быть образована, например, сильфоном из соответствующего гибкого материала - например, из пластмассы - или кожаным мехом.
Для того чтобы выдерживать правильные относительные положения узла зонда и намагничивающего узла и одновременно обеспечивать требуемую ограниченную подвижность узла зонда относительно намагничивающего узла, имеются различные возможности. Одна из таких возможностей состоит в том, что узел зонда крепится к намагничивающему узлу с помощью упруго деформируемого держателя. Держатель может быть выполнен так, чтобы узел зонда в отсутствии действующих сил занимал исходную позицию на исходном расстоянии от намагничивающего узла и мог смещаться от этой исходной позиции под действием внешних сил. Такой упруго деформируемый держатель может быть единственным держателем узла зонда. Это может быть особенно предпочтительно в том случае, когда упруго деформируемый держатель образован сильфоном, который одновременно может грязенепроницаемо уплотнять промежуточное пространство между намагничивающим узлом и узлом зонда, выполняя тем самым двойную функцию. Но возможно также крепление намагничивающего узла на первом устройстве держателя, а узла зонда - на втором, отдельном от первого, устройстве держателя. Эти устройства держателей могут независимо друг от друга шарнирно или иным подвижным образом крепиться к несущей конструкции преобразователя. В одном из вариантов осуществления второе устройство держателя, несущее узел зонда, шарнирно связано с первым устройством держателя. Таким образом можно достичь того, чтобы при движении первого устройства держателя мог смещаться комплекс намагничивающего узла и узла зонда, то есть весь ЭМАП, в то время как посредством смещения первого держателя относительно второго держателя осуществляется перемещение узла зонда относительно намагничивающего узла.
При необходимости между намагничивающим узлом и узлом зонда может быть предусмотрено наличие одного или нескольких концентраторов магнитного поля. Однако в некоторых электромагнитно-акустических преобразователях промежуточное пространство между магнитной системой и блоком катушек свободно от концентраторов магнитного поля. Это позволяет значительно уменьшить расстояние между магнитной системой и блоком катушек, сравнительно с обычными ЭМАП. Возможное повышение чувствительности контроля, связанное с уменьшением этого расстояния, может частично или полностью компенсировать эффект отсутствующих концентраторов магнитного поля.
Вариант осуществления, в котором промежуточное пространство между магнитной системой и блоком катушек свободно от концентраторов магнитного поля, может также быть предусмотрен в электромагнитно-акустическом преобразователе с жестко заданным расстоянием - или жесткой связью - между магнитной системой и блоком катушек.
В некоторых вариантах осуществления исходное расстояние между магнитной системой и блоком катушек составляет менее 8 мм, причем это расстояние может быть и меньше 7 мм, или меньше 6 мм, или меньше 5 мм. При ограниченно переменном расстоянии между блоком катушек и намагничивающим узлом это расстояние может несколько меняться, например на ±2 мм или на ±3 мм, вокруг номинального расстояния в 3 мм, или 4 мм, или 5 мм. Расстояние между магнитной системой и блоком катушек может также быть и больше.
Чтобы при необычных производственных условиях предотвратить возможность критического контакта между узлом зонда и намагничивающим узлом, в одном из вариантов осуществления настоящего изобретения предусмотрено распорное средство для ограничения взаимных смещений намагничивающего узла и узла зонда некоторой конечной минимальной величиной расстояния, так что непосредственный контакт этих движущихся друг относительно друга конструктивных узлов исключается. Между узлом зонда и намагничивающим узлом может располагаться слой упруго деформируемого материала или другое амортизирующее удары средство. Амортизирующий слой может быть образован частью материала сильфона.
В одном из вариантов осуществления на корпусе намагничивающего узла имеется распорка с опорными участками для непосредственного опирания распорки на поверхность испытуемого образца, причем размеры распорки таковы, что при соударении распорки с поверхностью испытуемого образца еще остается небольшое расстояние между максимально поджатым в направлении намагничивающего узла узлом зонда и намагничивающим узлом.
Строение блока катушек может быть традиционным. Были, однако, разработаны блоки катушек нового типа, которые, в частности, при отсутствии концентраторов магнитного поля обеспечивают наилучшие результаты контроля. В одном из вариантов осуществления блок катушек содержит несколько расположенных рядом друг с другом отдельных катушек, причем проводящие участки непосредственно соседствующих отдельных катушек взаимно перекрываются в некоторой зоне перекрытия. В качестве отдельных катушек используются обычно катушки без сердечников с одной или несколькими обмотками, причем эти обмотки определяют ось катушки. Каждая из зон перекрытия может находиться посередине между осями соседних катушек. Если в таком блоке катушек непосредственно соседствующие отдельные катушки включены в противофазе, так что в процессе работы устройства при переходе от одной отдельной катушки к другой происходит обращение фазы, или фазовый сдвиг на 180°, то можно добиться взаимоуничтожения нежелательных вкладов перекрывающихся в зоне перекрытия проводящих участков отдельных катушек. В частности, в таких случаях можно полностью отказаться от применения концентраторов магнитного поля, использовав вместо них маленькое расстояние между намагничивающим узлом и узлом зонда. Это очень способствует повышению чувствительности ЭМАП.
Блок катушек может быть построен из намотанных отдельных катушек. Если блок катушек создан в виде токопроводящих дорожек, нанесенных на - возможно, гибкую - подложку из электроизоляционного материала, то это особенно облегчает общий монтаж и демонтаж при первичной сборке, техобслуживании или ремонте. Токопроводящие дорожки могут наноситься на подложку печатью или другим способом покрытия.
При контроле или промере материала испытуемого образца ЭМАП может бесконтактно сканировать поверхность материала таким образом, что между узлом зонда и поверхностью материала имеется маленький воздушный зазор толщиной, например, около 5 мм. Возможно также, чтобы узел зонда находился в контакте с поверхностью материала и при перемещении относительно нее скользил по ней. В случае неровной поверхности материала узел зонда вследствие своей гибкости или подвижности относительно намагничивающего узла может следовать рельефу этой поверхности, даже при неизменности положения намагничивающего узла.
С помощью электромагнитно-акустического преобразователя, созданного согласно настоящему изобретению, можно решать различные измерительные задачи. К ним относится дефектоскопия с обнаружением (одномерных) точечных дефектов, (двумерных) дефектов типа поверхностей или кромок, а также трехмерных объемных дефектов на поверхности или внутри испытуемого образца. Далее, можно определять некоторые геометрические параметры, например, толщину материала, толщину стенок трубы и/или расстояния в испытуемом материале. Наконец, можно также определять некоторые свойства материала, например, твердость или упругие константы. В качестве материала испытуемого образца могут использоваться все достаточно электропроводящие материалы, например, различные стали, а также никель- или кобальтсодержащие материалы -но также и цветные металлы, например, алюминий, медь и многие другие металлы. Преобразователь может применяться при различных геометрических формах испытуемого образца, например, для непрерывного промера протяженных объектов типа прутка или труб с катаной или полированной поверхностью, листа или другого полуфабриката, но также и для промеров готовых изделий различных форм.
Настоящее изобретение относится также к устройству для ультразвукового контроля образцов из электропроводящего материала. Оно отличается тем, что включает, по меньшей мере, один электромагнитно-акустический преобразователь согласно настоящему изобретению.
Эти и дальнейшие особенности изобретения, помимо формулы изобретения, вытекают также из описания и чертежей, причем отдельные признаки изобретения могут быть реализованы как независимо, так и в сочетаниях в форме частичных комбинаций, и в других областях применения, представляя собой обеспечивающий преимущества вариант осуществления изобретения.
Краткое описание графических материалов
На ФИГ.1 показан в поперечном разрезе вариант осуществления электромагнитно-акустического преобразователя, находящегося в скользящем контакте с цилиндрической поверхностью пруткового испытуемого образца;
на ФИГ.2 показан продольный разрез устройства, изображенного на ФИГ.1, с защитными приспособлениями для защиты измерительного устройства от механических повреждений;
на ФИГ.3 показан вид сверху варианта осуществления блока катушек;
на ФИГ.4 показано схематическое изображение, иллюстрирующее противофазное возбуждение непосредственно соседствующих отдельных катушек блока катушек, и
на ФИГ.5 показан электромагнитно-акустический преобразователь с закрепленными на нем устройствами держателей для встраивания во вращающуюся головку контрольного устройства.
Осуществление изобретения
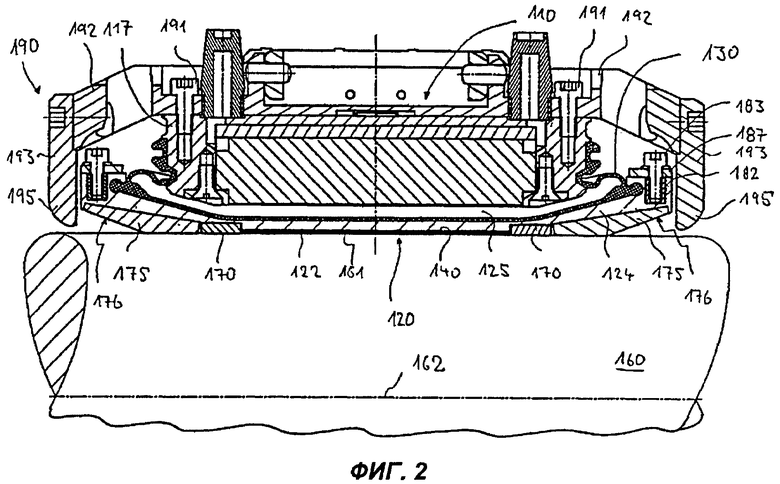
На ФИГ.1 показан в поперечном разрезе вариант осуществления электромагнитно-акустического преобразователя (ЭМАП) 100, находящегося в скользящем контакте с цилиндрической поверхностью 161 испытуемого образца 160 в форме цилиндрического прутка из ферромагнитной стали. ЭМАП включает намагничивающий узел 110, а также отдельный от него узел зонда 120, подвижно связанный с намагничивающим узлом замкнутым с обеих сторон сильфоном 130 из эластичной пластмассы таким образом, что положение узла зонда относительно намагничивающего узла при деформации сильфона - и связанное с этим увеличение или уменьшение расстояния между ними - может изменяться бесступенчато. При этом узел зонда всегда находится в области магнитного поля, созданного магнитной системой. Между намагничивающим узлом и расположенным на расстоянии от него узлом зонда 120 находится незаполненное материалом промежуточное пространство 125 переменного объема, которое со всех сторон окружено сильфоном 130 и тем самым защищено от попадания снаружи пыли и других загрязнений.
Намагничивающий узел 110 включает магнитную систему 115 для создания постоянного магнитного поля, которое при работе ЭМАП проникает в приповерхностные зоны испытуемого образца 160. В одном из примеров магнитная система 115 состоит из по-разному поляризованных постоянных магнитов 115А, 115В, 115С в форме прямоугольных параллелепипедов, причем полюса среднего магнита 115В расположены существенно радиально, или перпендикулярно к поверхности испытуемого образца, в то время как полюса каждого из непосредственно примыкающих внешних магнитов 115А, 115С расположены перпендикулярно к этой линии поляризации, или существенно параллельно поверхности испытуемого образца. Для магнитного экранирования этого магнитного поля имеется ферромагнитная пластина 116 со стороны постоянных магнитов, обращенной к узлу зонда. Постоянные магниты и экранирующая пластина неподвижно встроены в корпус 117, которым оканчивается намагничивающий узел со стороны, противоположной испытуемому образцу.
Количество и форма магнитов магнитной системы могут и отличаться от показанных. В частности, создание магнитного поля может быть осуществлено и с помощью электромагнитов. Как правило, поле, создаваемое магнитной системой, является постоянным, однако возможно также с помощью электромагнитов создать переменное низкочастотное поле или поле повышенной частоты. Управляя частотой этого переменного поля, можно устанавливать или менять концентрацию плотности магнитного потока через поверхность испытуемого образца.
Узел зонда 120 содержит блок 140 катушек индуктивности, вариант осуществления которого будет подробнее объяснен ниже с привлечением ФИГ.3 и 4. При этом речь может идти о катушках различных конструкций, которые могут быть размещены различными способами. Для защиты катушек перед блоком катушек со стороны, обращенной к испытуемому образцу, имеется тонкая защитная пластина 122, изготовленная из электрически непроводящего или плохо проводящего материала высокой механической износостойкости. В одном из примеров эта защитная пластина состоит из керамического композита, в котором керамические волокна связаны в керамической матрице. Блок катушек и защитная пластина укреплены вместе в плоской выемке устойчивой к кручению несущей рамы 124, изготовленной из электрически непроводящего материала и имеющей на показанных узких боковых сторонах пазы типа "ласточкин хвост" для крепления несущей рамы в гибком приемнике сильфона 130. Так как узел зонда 120 располагается с наружной стороны сильфона, между узлом зонда и намагничивающим узлом находится участок сильфона, образующий упруго деформируемый промежуточный слой, который может играть роль распорки, предотвращающей непосредственное соприкосновение несущей рамы узла зонда 120 и намагничивающего узла 110 и демпфирующей возможные удары. Блок 140 катушек подсоединяется к не показанной на ФИГ. электронной системе управления контрольного устройства с помощью соединительных проводов 142.
При применении ЭМАП намагничивающий узел 110 создает сильное магнитное поле в зоне узла зонда 120, а также в приповерхностном слое испытуемого образца 160. Блок катушек содержит катушки возбуждения, которые при соответствующем управлении высокочастотным переменным напряжением создают высокочастотное переменное электромагнитное поле возбуждения, накладывающееся на магнитное поле магнитной системы 115 и также проникающее в приповерхностные зоны испытуемого образца. Катушки возбуждения связаны с соответствующими электронными цепями и благодаря этому способны возбуждать в материале испытуемого образца короткие ультразвуковые импульсы, частота которых может лежать, например, в мегагерцевом диапазоне. Для возможности создания этих ультразвуковых импульсов материал испытуемого образца (испытуемый материал) должен, по меньшей мере, быть электропроводящим, чтобы в испытуемом материале создавались подвижные носители заряда, которые движутся в магнитном поле намагничивающего узла и под действием силы Лоренца воздействует на структуру решетки материала испытуемого образца, создавая таким образом непосредственно внутри испытуемого образца ультразвуковые волны. Испытуемый материал - предпочтительно ферромагнитный. То, какого вида ультразвуковые волны (по частоте и ориентации) будут созданы в материале испытуемого образца, зависит от направления созданного магнитной системой магнитного поля, а также от компоновки катушек возбуждения блока катушек индуктивности и электронной системы.
В блоке катушек находятся также катушки регистрации излучаемых материалом испытуемого образца переменных электромагнитных полей принимаемого сигнала. Речь при этом идет о катушках, также связанных с соответствующей электроникой и приспособленных для приема отраженного в материале испытуемого образца ультразвукового сигнала. Эти приемные катушки могут совпадать с передающими катушками (катушками возбуждения), однако могут быть предусмотрены и отдельные катушки. Оценив принятые сигналы, можно вывести заключение о дефектах в материале испытуемого образца или, соответственно, заключение о геометрических параметрах испытуемого образца (таких, например, как диаметр, толщина или толщина стенки). Возможно также по излученным сигналам определить различные упругие константы материала испытуемого образца.
Процесс возбуждения и приема ультразвуковых сигналов в настоящей заявке называется также контролем. При контроле, как правило, происходит относительное перемещение ЭМАП и испытуемого образца. Но можно и отказаться от относительного перемещения ЭМАП и испытуемого образца, например, при промерах толщины стенок труб. Чтобы создать требуемое относительное перемещение, можно, например, перемещать только ЭМАП относительно (покоящегося) испытуемого образца. Возможен также вариант, когда ЭМАП неподвижен, а движется только испытуемый образец, например, вращается и/или поступательно перемещается. Возможно также движение обоих элементов. При этом относительном перемещении имеет место движение узла зонда 120 преобразователя ЭМАП относительно поверхности 161 испытуемого образца 160. При этом степень покрытия контролируемой поверхности (полное или с пропусками) зависит от требований, связанных с целью контроля.
При указанном перемещении узел зонда 120, упруго деформируемую опору которого обеспечивает сильфон 130, может следовать рельефу поверхности испытуемого образца. При этом узел зонда, как правило, слегка прижимается упругими силами со стороны сильфона и, при определенных условиях, силами инерции к поверхности испытуемого образца, однако сила этого прижима так мала, что даже при скользящем контакте поверхности 161 испытуемого образца и защитной пластины 122 имеет место лишь небольшой износ. Можно также в отдельных фазах процесса работать бесконтактно. Так, например, если на пути зонда встречается подъем покрашенной поверхности, относительно легкий узел зонда может следовать рельефу этого подъема, отклоняясь в сторону намагничивающего узла, при этом произойдет кратковременное сужение воздушного зазора 125. Таким образом, в зависимости от характера поверхности величина воздушного зазора между намагничивающим узлом и узлом зонда ЭМАП будет более или менее сильно меняться. При этом не показанные вентиляционные каналы обеспечивают всей конструкции возможность «дышать» соответственно изменениям объема внутри сильфона, не допуская проникновения частиц грязи во внутреннее пространство сильфона.
Предпочтительному относительному перемещению узла зонда и намагничивающего узла благоприятствует крепление намагничивающего узла, с одной стороны, и узла зонда, с другой стороны, в различных, то есть движущихся независимо друг от друга, держателях. Один такой вариант будет объяснен ниже со ссылкой на ФИГ.5. На примере ФИГ.1 намагничивающий узел 110 закреплен в не показанном держателе, тогда как узел зонда 120 через посредство служащего держателем сильфона 130 закреплен непосредственно на намагничивающем узле. Таким образом, возможно крепление одного из двух держателей (в данном случае держателя узла зонда) на другом держателе (держателе намагничивающего узла). Возможно также использование только одного держателя. Во всяком случае, соответствующим исполнением приспособлений крепления узла зонда и намагничивающего узла можно добиться того, чтобы большая сила магнитного притяжения между намагничивающим узлом 110 и ферромагнитным испытуемым материалом не оказывала влияния на силу, действующую между узлом зонда 120 и поверхностью материала. Поэтому даже при контроле ферромагнитного материала в сильном магнитном поле магнитной системы возникают лишь малые силы прижима узла зонда к поверхности испытуемого образца, благодаря чему срок службы узла зонда может быть значительно продлен в сравнении с обычными системами.
Если в результате проведенного контроля образуется магнитная стружка или иные загрязнения, это в показанном варианте осуществления не окажет негативных влияний на работу преобразователя, так как промежуточное пространство 125 между намагничивающим узлом 110 и узлом зонда 120 пыленепроницаемо окружено сильфоном 130.
Электромагнитно-акустические преобразователи могут, например, при использовании в приближенной к производственным условиям промышленной среде подвергаться повышенным механическим, термическим и иным нагрузкам, которые отрицательно влияют на долговечность преобразователя и, в случае выхода его из строя вследствие преждевременного износа или повреждения, могут привести к простоям. Поэтому объясним, обратившись к ФИГ.2, некоторые защитные механизмы, которые по отдельности или в сочетании могут быть предусмотрены в преобразователе с целью надежного обеспечения его работоспособности даже в жестких условиях измерений. На продольном разрезе ФИГ. 2 показаны функциональные элементы и блоки, уже объясненные при рассмотрении ФИГ.1 и обозначенные теми же номерами позиций, что и на ФИГ.1.
Блок 140 катушек и предназначенная для его защиты защитная пластина 122 размещены в плоской выемке изготовленной из диэлектрика или электрически плохо проводящего материала несущей рамы 124, которая выступает в показанном продольном направлении как вперед, так и назад за пределы блока катушек и идет под углом в направлении намагничивающего узла, то есть удаляясь от испытуемого образца. Непосредственно рядом с выемкой для узла зонда и защитной пластины расположены относительно плоские первые защитные элементы 170 из износостойкого материала, например, из металла или керамики, чьи обращенные к испытуемому образцу плоские внешние поверхности лежат почти заподлицо с наружной стороной защитной пластины 122, однако, несколько выступают в направлении испытуемого образца. Так как эти элементы минимально выдвинуты вперед перед защитной пластиной, скользящий контакт происходит, как правило, только по этим элементам, и лишь при более значительной кривизне поверхности испытуемого образца происходит контакт также и по защитной пластине. К этим защитным элементам примыкают снаружи полозья 175 из износостойкого материала, например, керамики, укрепленные в соответствующей выемке на обращенной к образцу передней стороне рамы 124 и имеющие скошенные поверхности 176, идущие наружу-вверх под острым углом к рабочей поверхности, определяемой внешней стороной защитной пластины преобразователя. Если теперь ЭМАП перемещается с составляющей вектора движения, параллельной продольной оси 162 испытуемого образца, относительно поверхности 161 испытуемого образца, и эта поверхность образца имеет местные неровности в виде подъемов, то преодоление таких подъемов могло бы привести к повреждению защитной пластины, а при известных условиях - и блока катушек. Предотвращению такой возможности служат полозья 175 и защитные элементы 170, так как при наличии подъемов поверхности испытуемого образца на эти подъемы вначале наезжают скошенные поверхности полозьев, после чего весь узел зонда 120 благодаря снижению толщины промежуточного пространства 125 поднимается в направлении намагничивающего узла, до того как неровность окажется в зоне конструкции зонда. Тем самым надежно предотвращаются ударные нагрузки на чувствительную защитную пластину, которые могут возникнуть, например, при подводе или отводе испытуемого образца, закрепленного во вращающейся головке.
Кроме того, в варианте, показанном на ФИГ.2, видно, что не обязательно крепить узел зонда 120 исключительно через посредство сильфона 130 на намагничивающем узле, но можно предусмотреть отдельное (альтернативное или дополнительное) приспособление держателя узла зонда. Для этого в концевых в продольном направлении участках рамы 124 предусмотрены направленные вверх, то есть от испытуемого образца, резьбовые отверстия 182, позволяющие закрепить узел зонда с помощью крепежных винтов 183 в приспособлении держателя 187, более подробно показанном на ФИГ.5.
В дополнение к уже описанным элементам на ФИГ.2 показаны дальнейшие механизмы защиты ЭМАП от механического повреждения. На верхней, удаленной от узла зонда стороне корпуса 117 намагничивающего узла закреплены винтами 191 выступающие в продольном направлении, соответственно, вперед и назад скобы 192, к свободным концам которых привинчены выступающие вниз, то есть в направлении испытуемого образца, рейки 193. Эти рейки расположены в продольном направлении, соответственно, впереди и сзади прикрепленных к узлу зонда полозьев 175 и выступают наружу дальше полозьев. На обращенных к испытуемому образцу концевых участках реек сформированы скругленные с наружной стороны защитные участки 195. Скобы 192 с закрепленными на них рейками 193 играют роль распорного элемента 190 для непосредственного опирания намагничивающего узла на поверхность испытуемого образца, и высота опирания рассчитана так, что при соприкосновении защитного участка 195 с поверхностью 161 испытуемого образца узел зонда может быть вдавлен в направлении намагничивающего узла лишь настолько, чтобы между намагничивающим узлом и узлом зонда оставалось некоторое конечное минимальное расстояние и эти узлы не могли соприкоснуться. Если соприкосновение и происходит, то намагничивающий узел контактирует с внутренней стороной эластичного материала сильфона, который в этой зоне образует упруго деформируемую прокладку и способен погасить возможные удары. Благодаря этому с помощью ЭМАП можно без опасности его повреждения контролировать и очень неровные поверхности испытуемых образцов, которые при случае могут оказаться не вполне прямолинейными.
Как уже упоминалось, при сканировании поверхности испытуемого образца воздушный зазор 125 между узлом зонда 120 и намагничивающим узлом 110 может меняться в зависимости от характера поверхности испытуемого образца и степени прямолинейности контролируемого изделия. И в случае очень сильного отклонения изделия от прямолинейности может случиться, что воздушный зазор 125 полностью исчезнет, так что узел зонда окажется прижат к намагничивающему узлу. Если держатель намагничивающего узла выполнен до некоторой степени гибким, то и в данном случае по-прежнему возможно дальнейшее смещение, правда, в этом случае узел зонда 120 и намагничивающий узел 110 будут перемещаться вместе, и при этом большая сила магнитного притяжения между намагничивающим узлом и испытуемым материалом будет действовать и на узел зонда, что ощутимо сократит его срок службы. Применение распорного элемента 190 предотвращает это, так как на концах скоб 192 закреплены рейки 193, размер которых рассчитан так, что они упираются в поверхность испытуемого образца до того как будет полностью выбран воздушный зазор 125. Тем самым в случае очень искривленной поверхности испытуемого образца предотвращается воздействие на узел зонда сильно возросшей силы, что обеспечивает длительный срок службы прибора.
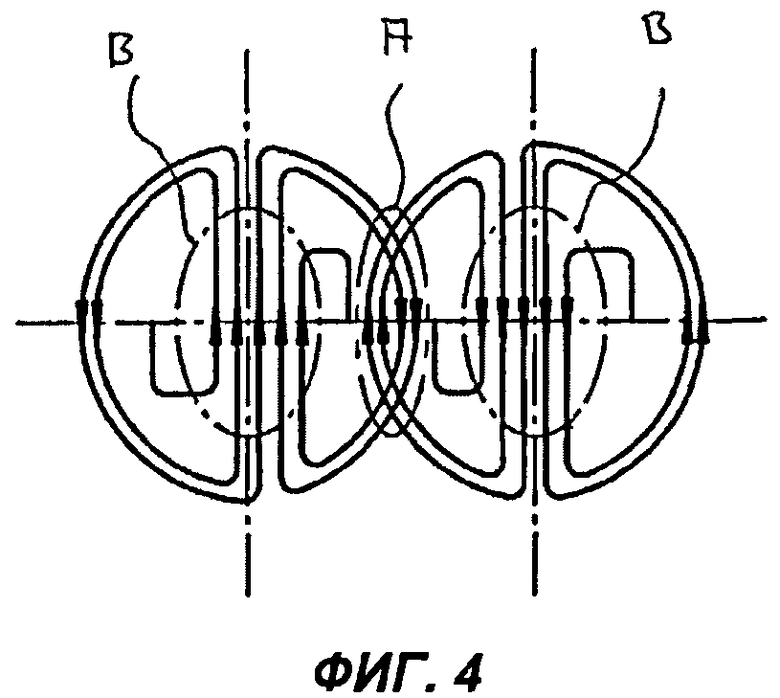
На ФИГ.3 показана одна из многочисленных возможностей построения блока катушек индуктивности. Блок 300 катушек выполнен в виде токопроводящих дорожек, нанесенных на гибкую подложку 302 из электроизолирующей пластмассы. Показан блок из восьми катушек, расположенных по прямой линии. Форма второй слева катушки (№2) для наглядности выделена жирной линией. Все катушки имеют симметричную конструкцию со средней зоной В, в которой токопроводящие дорожки параллельны и ток по ним течет в одном и том же направлении. Обратные линии разделены на левую и правую от центральной зоны В части. Там ток течет по проводникам в противоположных направлениях. Зоны обратных линий непосредственно соседствующих катушек перекрываются в зонах перекрытия А. Для ясности на ФИГ. 4 показано упрощенное схематическое изображение, двух непосредственно соседствующих катушек индуктивности. При этом указано направление токов двух соседних катушек в непосредственно соседствующих средних зонах В и в лежащих между ними обратных линиях, пространственно перекрывающихся в зонах перекрытия А. Стрелки, обозначающие направления тока, показывают, что непосредственно соседствующие зонды возбуждаются переменным напряжением противофазно, то есть с фазовым сдвигом на 180°, так что сквозь расположенные в зоне перекрытия А обратные линии двух соседних катушек индуктивности токи текут в противоположных направлениях. И если расположить несколько катушек с перекрытием так, что обратные линии соседних катушек будут находиться точно друг над другом, то вклады этих обратных линий взаимно уничтожатся, если катушки индуктивности будут возбуждаться одновременно, но с переменой фазы при переходе от каждой катушки к ближайшей соседней.
В частности, при таких условиях можно отказаться от установки концентраторов магнитного поля между магнитной системой намагничивающего узла и блоком катушек узла зонда. В традиционных электромагнитно-акустических преобразователях между магнитной системой и блоком катушек предусматриваются так называемые концентраторы магнитного поля для того, чтобы сконцентрировать созданный магнитной системой магнитный поток в центральных зонах катушек (соответствующих зонам В на ФИГ.4) блока катушек и как можно меньше подвергать воздействию магнитного поля обратные линии. В отличие от этого, при расположении катушек индуктивности с перекрытием обратных линий никаких концентраторов магнитного поля не требуется, так как вклады обратных линий взаимно уничтожаются. Возможны также и другие варианты осуществления блока катушек, в которых можно отказаться от концентраторов магнитного поля. Создаваемое при этом в испытуемом материале звуковое поле, как правило, будет отличаться от поля системы с концентраторами.
Блок катушек, аналогичный показанному на ФИГ.3, может быть построен как из нескольких отдельных намотанных катушек, так и в показанном варианте осуществления соответствующей проводящей структуры на изолирующей подложке в едином блоке.
И в случае такой компоновки катушек индуктивности, и при синфазном возбуждении можно работать без концентраторов магнитного поля. Например, если показанный на ФИГ.3 блок катушек эксплуатируется таким образом, что все катушки возбуждаются синфазно, то токи в двух расположенных друг над другом зонах обратных линий непосредственно соседствующих катушек будут течь в направлениях, противоположных средним частям В соседних катушек. Результирующий эффект будет таков, словно между каждыми двумя катушками блока катушек расположена еще одна, возбуждаемая в противофазе относительно обеих соседних катушек.
Электромагнитно-акустические преобразователи описанного здесь на нескольких примерах вида могут применяться для решения самых разных задач контроля и могут быть реализованы в контрольных устройствах самых разных конструкций. На ФИГ.5 показан вариант осуществления, который может применяться, например, для дефектоскопии кернов пруткового материала. Испытуемый образец 160 с высокой скоростью (например, несколько м/с) движется сквозь контрольное устройство в направлении своей продольной оси 162. Контрольное устройство включает вращающуюся головку, на которой с помощью поворотных рычажных приспособлений укреплены несколько электромагнитно-акустических преобразователей, причем так, что преобразователи находятся в скользящем контакте с поверхностью 161 испытуемого образца (в других вариантах осуществления между поверхностью и преобразователями имеется небольшой воздушный зазор) и при вращении вращающейся головки сканируют эту поверхность по винтовым полосам, которые при соответствующем согласовании скорости вращения вращающейся головки и скорости подачи испытуемого образца могут граничить или перекрываться для обеспечения контроля испытуемого образца без пропусков. Принципиальная конструкция вращающейся головки специалистам известна и поэтому подробнее здесь не описывается. На ФИГ.5 от вращающейся головки показана только часть ротора 200, вращающегося соосно продольной оси 162 испытуемого образца.
Электромагнитно-акустический преобразователь 100 с помощью поворотного рычажного приспособления 189, укреплен на роторе 200 так, что рычаг можно откинуть. ЭМАП включает узел зонда 120, который в процессе работы находится в скользящем контакте с поверхностью испытуемого образца, радиально отстоящий от зонда намагничивающий узел 110 и гибкий сильфон 130, служащий гибкой связью этих отделенных друг от друга и подвижных относительно друг друга узлов. Намагничивающий узел 110 укреплен на первом держателе 185 в виде откидного рычага, закрепленного на роторе 200 с возможностью легкого поворота вокруг оси вращения 186. Узел зонда 120 укреплен на втором держателе 187 в виде откидного рычага, шарнирно закрепленного на откидном рычаге 185, то есть на первом держателе, относительно которого он может легко поворачиваться вокруг оси вращения 188. При повороте первого держателя 185 весь ЭМАП движется к испытуемому образцу или от испытуемого образца. В отличие от этих движений всякое перемещение узла зонда относительно намагничивающего узла - к намагничивающему узлу или от него - связано с поворотом второго держателя 187 относительно первого держателя 185, причем держатель обеспечивает такое перемещение узла зонда, которое исключает перекос или скручивание узла зонда в осевом направлении, по существу допуская лишь поступательное перемещение к намагничивающему узлу или от него. При этом второй держатель представляет собой пассивную направляющую. Перемещение узла зонда относительно намагничивающего узла зависит исключительно от рельефа поверхности испытуемого образца, который может вызвать отход следующего рельефу узла зонда от намагничивающего узла.
По соображениям механики и техники контроля, как правило, целесообразно крепить на роторе еще одно устройство, идентичное изображенному, но повернутое на 180° относительно изображенного, чтобы в целом возникало сбалансированное контрольное устройство, способное с высокой скоростью вращаться вокруг подаваемого напроход испытуемого образца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2016 |
|
RU2656134C2 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2243550C1 |
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2258218C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2271876C1 |
| ПРОТЕКТОР ДЛЯ ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2010 |
|
RU2457479C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2447430C1 |
| Электромагнитно-акустический преобразователь | 1990 |
|
SU1748054A1 |
| ЭЛЕКТРОМАГНИТНЫЕ АКУСТИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ | 2003 |
|
RU2298786C2 |


Использование: для ультразвукового контроля образцов из электропроводящего материала. Сущность: заключается в том, что электромагнитно-акустический преобразователь для ультразвукового контроля образцов из электропроводящего материала содержит магнитную систему (115) для создания магнитного поля, проникающего в образец (160), и блок (140, 300) катушек индуктивности для создания переменного электромагнитного поля, накладывающегося на указанное магнитное поле в образце, и для регистрации переменных электромагнитных полей, излучаемых образцом, при этом магнитная система (115) размещена в намагничивающем узле (110), а блок катушек - в узле зонда (120), отделенном от намагничивающего узла, причем обеспечено постоянное нахождение узла зонда (120) в области магнитного поля, созданного намагничивающим узлом, и узел зонда установлен с возможностью перемещения относительно намагничивающего узла (110) в области магнитного поля при работе преобразователя. Технический результат: обеспечение возможности создания электромагнитно-акустического преобразователя (ЭМАП) для ультразвукового контроля, который позволяет сканировать испытуемый образец с высокой относительной скоростью, но без существенных ограничений, связанных со сроком службы ЭМАП или чувствительностью контроля. 2 н. и 12 з.п. ф-лы, 5 ил.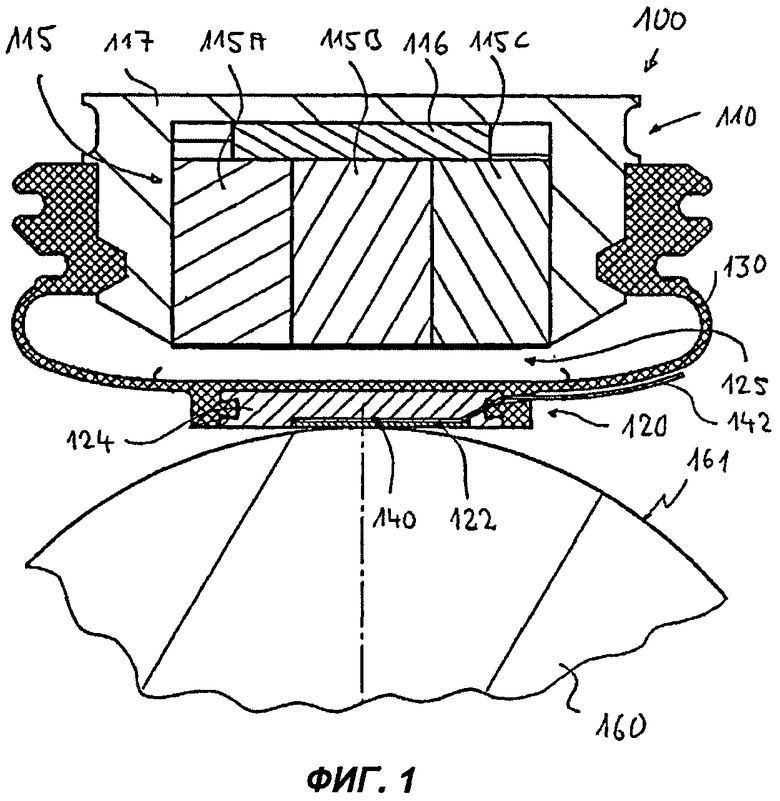
1. Электромагнитно-акустический преобразователь для ультразвукового контроля образцов из электропроводящего материала, содержащий магнитную систему (115) для создания магнитного поля, проникающего в образец (160), и блок (140, 300) катушек индуктивности для создания переменного электромагнитного поля, накладывающегося на указанное магнитное поле в образце, и для регистрации переменных электромагнитных полей, излучаемых образцом, отличающийся тем, что магнитная система (115) размещена в намагничивающем узле (110), а блок катушек - в узле зонда (120), отделенном от намагничивающего узла, причем обеспечено постоянное нахождение узла зонда (120) в области магнитного поля, созданного намагничивающим узлом, и узел зонда установлен с возможностью перемещения относительно намагничивающего узла (110) в области магнитного поля при работе преобразователя.
2. Преобразователь по п.1, отличающийся тем, что между намагничивающим узлом (110) и узлом зонда (120) находится промежуточное пространство (125) переменного объема, которое со всех сторон окружено грязенепроницаемой гибкой оболочкой (130).
3. Преобразователь по п.2, отличающийся тем, что гибкая оболочка представляет собой сильфон (130) из гибкого материала, выполненный, в частности, в виде пластмассового или кожаного сильфона.
4. Преобразователь по п.1, отличающийся тем, что узел зонда (120) закреплен на намагничивающем узле (110) с помощью упругодеформируемого держателя, который предпочтительно включает сильфон (130), грязенепроницаемо уплотняющий промежуточное пространство (125) между намагничивающим узлом (110) и узлом зонда (120).
5. Преобразователь по п.1, отличающийся тем, что намагничивающий узел (110) укреплен на первом держателе (185), а узел зонда (120) - на втором держателе (187), выполненном отдельным от первого держателя, причем второй держатель (187), удерживающий узел зонда (120), предпочтительно шарнирно соединен с первым держателем (185).
6. Преобразователь по п.1, отличающийся тем, что промежуточное пространство (125) между магнитной системой (115) и блоком (140) катушек свободно от концентраторов магнитного поля.
7. Преобразователь по п.1, отличающийся тем, что исходное расстояние между магнитной системой (115) и блоком (140) катушек составляет менее 8 мм, в частности менее 5 мм.
8. Преобразователь по п.1, отличающийся тем, что предусмотрено, по меньшей мере, одно распорное средство для ограничения расстояния взаимных смещений намагничивающего узла (110) и узла зонда (120) до некоторой конечной минимальной величины.
9. Преобразователь по п.1, отличающийся тем, что между намагничивающим узлом (110) и узлом зонда (120) расположено средство амортизации ударов, в частности слой упругодеформируемого материала.
10. Преобразователь по п.1, отличающийся тем, что на корпусе намагничивающего узла закреплен распорный элемент (190) с опорными участками (193) для непосредственного опирания распорного элемента на поверхность (161) образца (160), причем размеры распорного элемента выбраны так, чтобы при соприкосновении распорного элемента с поверхностью образца между максимально отклоненным в направлении намагничивающего узла узлом зонда (120) и намагничивающим узлом (110) оставалось некоторое конечное расстояние.
11. Преобразователь по п.1, отличающийся тем, что блок (140, 300) катушек включает несколько расположенных рядом друг с другом отдельных катушек, причем проводящие участки непосредственно соседствующих отдельных катушек перекрываются в зоне перекрытия (А).
12. Преобразователь по п.1, отличающийся тем, что блок (140, 300) катушек включает несколько расположенных рядом друг с другом отдельных катушек, причем непосредственно соседствующие отдельные катушки включены в противофазе.
13. Преобразователь по п.1, отличающийся тем, что блок (300) катушек включает токопроводящие дорожки, нанесенные на гибкую подложку (302) из электроизолирующего материала.
14. Устройство для ультразвукового контроля образцов из электропроводящего материала, отличающееся тем, что содержит, по меньшей мере, один электромагнитно-акустический преобразователь, охарактеризованный в одном из предшествующих пунктов.
| US 4337662 A, 06.07.1982 | |||
| БЛОК КАТУШЕК ИНДУКТИВНОСТИ ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2006 |
|
RU2325638C1 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2246106C2 |
| Устройство для механизированного открывания крышек загрузочных люков коксовых печей | 1939 |
|
SU58714A1 |
| George A | |||
| Alers, Electromagnetic induction of ultrasonic waves: EMAT, EMUS, EMAR, EMAT Consulting San Luis Obispo, CA, September 2, 2004 | |||
| US 5837898 A, 17.11.1998. | |||

