Изобретение относится к области неразрушающего контроля при реализации ультразвуковых бесконтактных (без применения контактирующей жидкости) методов дефектоскопии для обнаружения дефектов в рельсах на значительных скоростях сканирования.
Для дефектоскопии рельсового пути используют различные средства: магнитодинамические, ультразвуковые, вихретоковые, подповерхностного радиолокационного зондирования, оптические и т.д. Магнитодинамические методы могут работать во всех климатических зонах при любых погодных условиях, но эти методы могут обнаруживать дефекты только в верхней части головки рельса.
Ультразвуковые методы с возбуждением акустических колебаний с помощью пьезоэлектрических преобразователей могут озвучивать рельс практически по всему сечению, но требуют создания акустического контакта путем подачи контактирующей жидкости под преобразователи. Это обстоятельство усложняет применение ультразвуковых (УЗ) методов в зимних условиях. Поэтому разработка бесконтактных (без применения контактирующей жидкости) ультразвуковых методов контроля рельсов является актуальной.
Из всех известных методов реализации бесконтактного ультразвукового (УЗ) контроля металлов (лазерное возбуждение и прием УЗ колебаний, контроль с помощью нормальных волн на значительные расстояния и др.) наиболее перспективным и реализуемым является использование бесконтактных электромагнитно-акустических (ЭМА) преобразователей, обладающих рядом существенных преимуществ перед традиционным контактным методом с использованием пъезопреобразователей [1].
Можно выделить два основных элемента конструкции ЭМА преобразователя:
- намагничивающая система, состоящая из магнита (набора магнитов или электромагнита) и магнитопровода, формирующая постоянное магнитное поле;
- индуктор (измерительный датчик), как правило, представляющий собой эллиптическую (или любой другой конфигурации) плоскую катушку индуктивности (или несколько катушек) [2].
В зазоре между полюсом (или концентратором) магнита и контролируемым изделием размещается катушка индуктивности индуктора ЭМА преобразователя, представляющая собой плоскую катушку в форме меандра, «бабочки» или иной формы. Импульсный ток УЗ частоты, протекающий в плоской катушке индуктора, вызывает колебания поверхностного слоя контролируемого изделия. УЗ колебания, распространяясь по изделию, фиксируют эхо- и/или зеркально-теневым методами УЗ контроля искомые дефекты.
Эффективность ЭМА-преобразования напрямую зависит от величины подмагничивающего поля, создаваемого намагничивающей системой ЭМА-преобразователя. Из [2] известно, что эффективность ЭМА преобразователей в совмещенном режиме (излучение - прием) пропорциональна квадрату величины поля подмагничивания В. При этом достаточно намагнитить только скин-слой ферромагнетика, обусловленный высокочастотным (УЗ частоты) электромагнитным полем, который создается первичными ЭМА преобразователями - катушками индуктора. Именно в скин-слое ферромагнетика происходит взаимное преобразование высокочастотных электромагнитных и акустических колебаний. Другими словами, эффективность ЭМА-преобразования зависит от намагничивающей системы и создаваемого ею магнитного поля в скин-слое контролируемого материала.
Для создания больших полей при ЭМА контроле используют намагничивающие системы, представляющие собой массивные сборки из постоянных магнитов. Установлено, что подмагничивающее поле сильно зависит от зазора между намагничивающей системой и поверхностью контролируемого ферромагнетика [3].
Известен ЭМА преобразователь [4], в котором магнитопровод намагничивающего устройства выполнен в виде полого цилиндра из магнитного материала и обеспечивающего в сочетании с "воздушной подушкой" стабильное положение катушек индуктора параллельно поверхности объекта контроля. В конструкции выполнены сквозные каналы, соединенные с внутренним каналом магнитопровода, имеющего на противоположном конце отверстия для подачи сжатого воздуха. Выполнение намагничивающего устройства в указанном виде позволяет создавать под измерительным датчиком воздушную подушку, частично предохраняющую систему от повреждения при наличии на поверхности изделия неровностей. Недостатком известного устройства является сложность конструкции, необходимость сжатого воздуха и низкая чувствительность контроля.
Известен ЭМА преобразователь [5], который, с целью повышения долговечности и надежности контроля, снабжен протектором, выполненным в виде бесконечной эластичной ленты и обрезиненных роликов, а подмагничивание осуществляется с помощью соленоида, размещенного с другой стороны контролируемого листового материала, установленного с возможностью поворота относительно оси, перпендикулярной к поверхности ленты. К недостатку известного ЭМАП следует отнести значительную сложность конструкции, наличие контакта с объектом контроля, необходимость двустороннего доступа к изделию для размещения подмагничивающего соленоида и невозможность контроля рельсов.
Известен ЭМА преобразователь изделий и образцов из электропроводящего материала по патенту [6], заявленному немецкой фирмой «Институт др. Ферстер ГМБХ КО», содержащий узел намагничивания контролируемого изделия и узел зонда (индуктора) с катушками индуктивности, размещенный в области магнитного поля с возможностью перемещения относительно намагничивающего узла. Преимуществом известного устройства является выполнение узла намагничивания и узла индуктора (узел зонда) с определенной степенью свободы между собой. При этом сильное магнитное притяжение между намагничивающим узлом и контролируемым ферромагнитным изделием не влияет (или влияет очень мало) на ту силу, которая прижимает узел индуктора к поверхности изделия. Благодаря этому, как заявляют авторы известного патента, контроль ферромагнитного материала может осуществляться малой нагрузкой на индуктор и малой степенью износа при сохранении скользящего контакта между узлом индуктора и поверхностью контролируемого изделия. Недостатком известного устройства является использование в качестве узла намагничивания системы, состоящей из постоянных магнитов (или электромагнита), расположенного над узлом индуктора на определенном (до 8 мм) расстоянии. Необходимость соблюдения этого расстояния обуславливает применение сложной конструкции взаимного крепления узлов и специальных защитных мер по сохранению этого зазора.
Известен электромагнитно-акустический дефектоскоп для контроля железнодорожных рельсов [7], содержащий два ЭМА преобразователя, расположенных на расстоянии друг от друга для реализации теневого метода УЗ контроля. Преобразователи установлены с обеспечением зазора относительно контролируемого рельса и перемещаются синхронно вдоль рельса. Недостатком известного устройства является возможность контроля только зоны головки рельса и высокий уровень шумов (шумов Баркгаузена) при значительных скоростях сканирования.
Известны способ и устройство для ультразвукового контроля рельсов [8], содержащие тестовое колесо с множеством ЭМА преобразователей, смонтированных в специально сделанные углубления в ободе по периметру тестового колеса, в углублениях размешены магнитные системы из постоянных магнитов (в варианте или электромагнитов), устройство удержания преобразователей и индукторы. В процессе контроля колесо катится по рельсу и в каждый момент времени один, два или более ЭМА преобразователей оказываются в зоне контактного пятна между колесом и контролируемым рельсом. При этом индуктор и расположенные над ним постоянные магниты оказываются на минимальном расстоянии от поверхности катания рельса, создавая условия возбуждения/приема УЗ колебаний бесконтактным (сухим) способом.
Идея, предложенная в известном способе и устройстве УЗ контроля рельсов, весьма оригинальна и, как утверждает автор, позволяет реализовать УЗ контроль рельсов до 80 км/ч в любых (в том числе и при значительных отрицательных температурах) условиях без применения контактирующей жидкости.
Недостатком известного способа и устройства является сложность реализации и низкая эффективность возбуждения/приема УЗ колебаний. Последнее связано с тем, что, как известно [2], эффективность возбуждения УЗ колебаний во многом зависит от величины создаваемого магнитного поля для подмагничивания контролируемого образца. Предусмотренные в известном устройстве постоянные магниты имеют небольшие размеры в ограниченном пространстве обода тестового колеса и большие поля рассеяния на металлическую конструкцию самого тестового колеса. Все это приводит к снижению величины магнитного потока, пронизывающего через пятно контакта контролируемый рельс, и как следствие, к низкой эффективности бесконтактного возбуждения УЗ колебаний.
Задачей, решаемой заявляемым изобретением, является повышение эффективности возбуждения УЗ колебаний бесконтактным (без применения контактирующей жидкости) способом в контролируемом рельсе при значительных скоростях сканирования с одновременным упрощением и повышением надежности конструкции устройства.
Поставленная задача решается тем, что в устройстве для электромагнитно-акустического контроля рельсов, содержащем тестовое колесо с множеством ЭМА преобразователей, равномерно размещенных в специально сделанных углублениях в ободе по периметру тестового колеса, в соответствии с заявляемым изобретением, магнитная система ЭМА преобразователей выполнена в виде двухосной тележки с размещением соленоидов на осях колесных пар, соленоиды связаны магнитной цепью с осями колесных пар, колеса служат полюсами электромагнита и не менее чем одно колесо тележки на каждой рельсовой нити является тестовым, а индукторы электромагнитно-акустических преобразователей закреплены в ободе колеса герметично.
Существенными отличиями и особенностями заявляемого технического решения по сравнению с прототипом являются:
1. Высокая эффективность и стабильность бесконтактного ЭМА возбуждения/приема УЗ колебаний, обусловленная тем, что с помощью соленоидов, размещенных на осях колесных пар двухосной тележки, как показывает практика [9], удается создавать значительные магнитные поля как в скин-слое поверхности рельса, так и на участке рельсов (левой и правой нитки пути) между полюсами электромагнита. В прототипе постоянные магниты, размеры которых ограничены размером обода тестового колеса, не могут создавать магнитный поток достаточной величины.
2. Эффективное использование создаваемого соленоидами магнитного поля для одновременного контроля правой и левой ниток рельсового пути и создание магнитного потока требуемой величины одновременно под 4-мя колесами тележки. В прототипе постоянные магниты, монтируемые в обод колеса, являются индивидуальными для каждой высокочастотной катушки-индуктора. Если предположить, как заявлено в прототипе, что для каждого блока электромагнитно-акустического датчика требуется не менее 9 элементарных магнитов, а на ободе колеса могут разместиться до 500 ЭМА преобразователей, то только для изготовления одного тестового колеса потребуется 4500 постоянных магнитов, что значительно усложняет и удорожает конструкцию.
3. Возможность, в зависимости от решаемых задач, регулировать магнитное поле в контактном пятне между колесом и рельсом и в межколесном участке рельсов путем регулировки тока в соленоидах электромагнитов. В прототипе такая возможность исключена.
4. Простота и надежность конструкции, вызванные тем, что в соответствии с заявляемым техническим решением, в ободе колеса необходимо устанавливать только плоские высокочастотные катушки - индукторы ЭМА преобразователя. На практике индукторы представляют собой витки провода толщиной доли миллиметров. В результате, в сечении обода колеса, являющегося одновременно опорным колесом дефектоскопной тележки, для размещения индукторов выполняют небольшие (не более 5 мм) углубления, не влияющие на несущую способность колеса. В прототипе необходимость размещения постоянных магнитов в ободе тестового колеса вынуждает изготавливать сложные камеры и защитные механизмы от повреждения (пружины или дополнительные постоянные магниты для втягивания ЭМА преобразователей). Все это нарушает первоначальную конструкцию колеса и снижает его несущую способность и прочностные свойства.
5. Надежность работы заявляемой конструкции, обеспечивающаяся тем, что монтируемые в обод колеса индукторы с помощью высокопрочного компаунда фиксируются неподвижно и герметично в углублениях обода. В прототипе предусмотрена подвижная конструкция ЭМА преобразователей в камерах (углублениях) обода. Это предусматривает наличие между блоком ЭМА и конструкцией обода определенного технологического зазора, загрязнение которого в процессе работы в реальных условиях, может привести к полному отказу системы.
6. Простота транспортировки устройства в нерабочем положении, так как в заявляемом устройстве достаточно выключить соленоиды на осях колесных пар. В прототипе наличие постоянных магнитов исключает такую возможность.
Заявляемое устройство иллюстрируется следующими графическими материалами.
Фиг. 1 - Схема возбуждения магнитного потока,
где 1 - тележка с двумя колесными парами;
2а и 2б - рельсовая колея с рельсами 2а и 2б;
3 и 4 - колесные пары с колесами 3а и 3б для колесной пары 3 и колесами 4а и 4б для пары 4 соответственно;
5 - катушки (соленоиды) электромагнитов на осях колесных пар 3 и 4;
6 - магнитный поток, создаваемый электромагнитами на осях колесных пар, замыкающийся через колеса тележки и участков рельсов между колесами тележки 1;
7 - рама тележки 1, выполненная из немагнитного материала.
Фиг. 2 - Размещение индуктора в тестовом колесе,
где 8 - поверхность катания тестового колеса (например, колесо 3б колесной пары 3);
9 - индуктор - высокочастотная катушка размещенная в углублении обода тестового колеса;
10 - углубление в ободе колеса;
11 - высокопрочный компаунд;
12 - выводы индуктора 9;
13 - отверстие в ободе колеса;
14 - поверхность катания контролируемого рельса (например, рельса 2б).
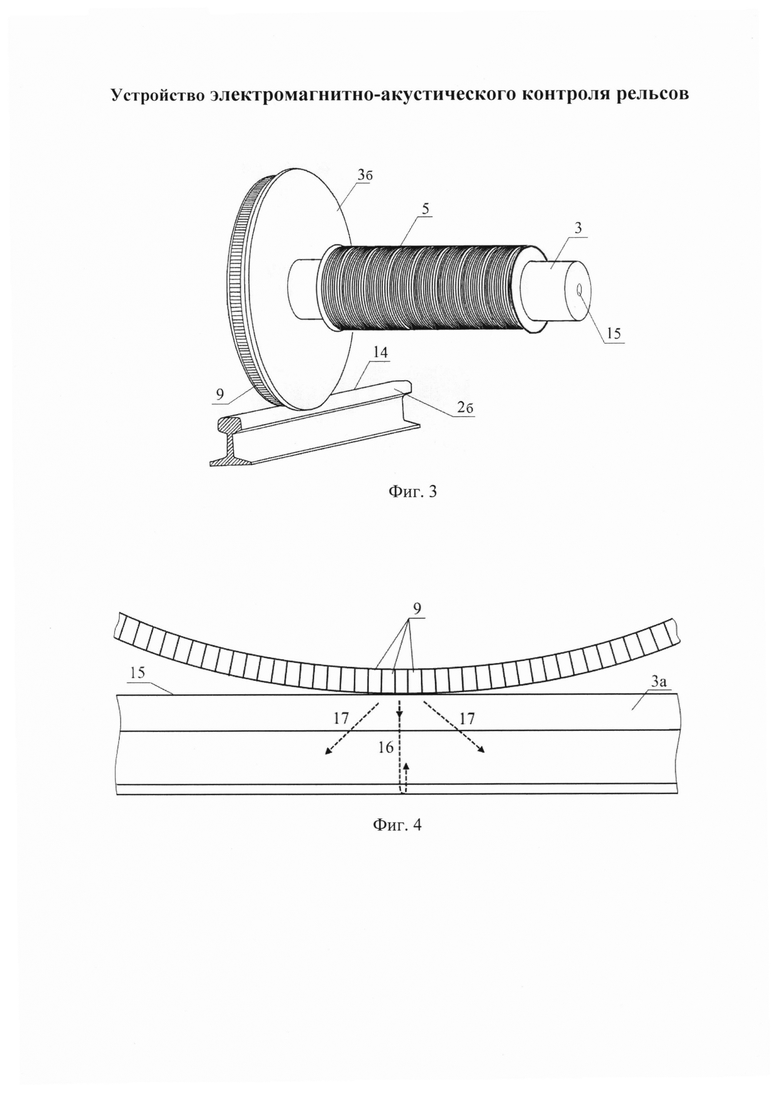
Фиг. 3 - Тестовое колесо со множеством индукторов ЭМА преобразователя (например, колесо 3б колесной пары 3) тележки 1,
где 5 - катушка электромагнита;
9 - индукторы ЭМА преобразователя;
14 - отверстие в оси колесной пары;
15 - поверхность катания рельса (2а или 2б).
Фиг. 4 - Формирование ультразвуковых колебаний в контролируемом рельсе,
где 9 - индукторы ЭМА преобразователя;
16 - ультразвуковые лучи, направленные нормально к поверхности катания 15 рельса 2б;
17 - ультразвуковые лучи в рельсе, возбуждаемые наклонно к поверхности катания 15.
Рассмотрим возможность и особенности реализации заявляемого устройства.
Тележку 1 с двумя колесными парами 3 и 4 (Фиг. 1) устанавливают на рельсовую колею с рельсами 2а и 2б. На осях 3 и 4 колесных пар расположены соленоиды 5 (катушки намагничивания). Оси 3 и 4 совместно с катушками 5 образуют своеобразные электромагниты. При подключении электрического тока к катушкам 5 образуется замкнутый магнитный поток 6, без воздушных зазоров и соответствующих потерь. Обмотки катушек 5 подключаются к источнику электрического напряжения согласованно так, чтобы магнитный поток 6 проходил по пути: ось 3 первой колесной пары - колесо 3а - пятно контакта колеса с рельсом 2а, рельс 2а (одной нитки рельсовой колеи) - пятно контакта колеса 4а второй колесной пары 4 - ось 4 другой колесной пары - другое колесо 4б этой пары - рельс 2б другой нитки рельсовой колеи и колесо 3б первой пары.
Связывающие конструктивные элементы 7 тележки 1, с целью исключения потерь магнитного потока, выполняют из немагнитного материала (например, из нержавеющей стали).
Пространственное распределение магнитного поля, генерируемого предлагаемой намагничивающей системой таково, что, во-первых, достигается высокая концентрация индукции в области контакта обода колеса и рельса. Высокий уровень подмагничивающего поля (более 2,0 Тл) позволяет эффективно осуществлять эмиссию поперечных акустических волн при условии размещения индукторов в этой области. Кроме того, высокий уровень продольной намагниченности (около 1,0 Тл) позволяет осуществлять эмиссию продольных акустических волн в объект контроля.
Аналогичная система намагничивания применяется при реализации магнитодинамического (МД) метода контроля известна из патентов и публикаций [10-15]. Успешный опыт эксплуатации известной системы намагничивания подтверждает реализуемость предлагаемого технического решения. Однако известные технические решения (МД метод) позволяет обнаруживать только дефекты в головке рельсов, залегающие на глубине, не превышающем 15 мм от поверхности катания рельса.
Известные технические решения создают магнитное поле на участках рельсов между колесами для реализации магнитного (магнитодинамического) контроля и предназначены в основном для обнаружения дефектов в головке рельсов и поперечных изломов в рельсах. Система безопасна при значительных скоростях сканирования (испытана при контроле рельсов до 80 км/ч) на эксплуатируемых железнодорожных путях при проезде любых участков пути с болтовыми и сварными стыками, стрелочными переводами, участков рельсового пути с автомобильными переездами и мостами [10, 15].
Таким образом, все известные рассмотренные и аналогичные методы намагничивания имеют узкую область применения и не позволяют реализовать бесконтактное (сухое, без применения контактирующей жидкости) возбуждение и прием упругих (акустических) колебаний УЗ частоты и имеют ограниченную функциональную возможность. Имеются примеры одновременного применения МД и УЗ методов, когда одновременно с реализацией МД метода осуществляют и УЗ метод контроля [12, 15, 16]. Однако при этом используются контактные УЗ преобразователи со всеми их недостатками (требование контактирующей жидкости для создания акустического контакта, нестабильность контакта в процессе сканирования и т.д.). Размещение контактных УЗ преобразователей в известных решениях связано лишь использованием специальной тележки с электромагнитами на осях колесных пар в качестве носителя или устройства для размещения контактных акустических блоков при сканировании контролируемого изделия.
С целью расширения функциональных возможностей в заявляемом изобретении предлагается магнитный поток 6, создаваемый рассмотренной системой намагничивания, использовать для бесконтактного (сухого, без использования контактирующей жидкости) контроля рельсов путем ЭМА возбуждения/приема УЗ колебаний. Для этого одно или два колеса на каждой рельсовой нити дорабатывают путем установки на поверхностях катания 8 колес (например, 3а и 3б) множества индукторов 9 ЭМА преобразователя. Индукторы 9 устанавливают в ободе колеса в углублениях 10, выполненных со стороны поверхности катания 8 тестового колеса.
Углубления выполняют путем фрезеровки или другим известными способами через равные расстояния друг от друга по всей окружности колеса 3а. Для исключения выпадения индукторов 9 из углублений 10 последние можно выполнить с помощью известных инструментов, в виде элемента соединения так называемого «ласточкина хвоста» (Фиг. 2). После установки индукторов 9 углубления 10 заливают сверхпрочным компаундом 11 (например, компаунд высокой прочности Анатерм-206 по ТУ 2257-400-00208947-03). Компаунд может использоваться в условиях высокого давления, температурных перепадов и вибрации, обладает адгезией к металлам и имеет химическую и термическую устойчивость к нефтепродуктам, газам, растворам кислот и щелочей. При размещении витков индуктора 9 необходимо соблюдать условие максимального приближения витков плоской катушки к поверхности катания 8 тестового колеса (а значит и к поверхности катания 14 контролируемого рельса), одновременно максимально удаляя от внутренней стенки углубления 10, что позволит предотвратить появление мешающих сигналов от материала обода колеса.
Электрические выводы 12 от катушек индуктора 9 прокладывают через сверления 13 в колесе 3а и сверление 15 в оси 3 для последующего соединения через круговой коммутатор с электронной схемой дефектоскопа (на чертеже не показаны).
При установке колеса 3б на рельс 2б в зоне пятна контакта между поверхностью катания 8 колеса 3б и поверхностью катания 14 рельса 2б последовательно оказываются индукторы 9 (см. Фиг. 4). При подаче зондирующего импульса на индукторы 9 в действующем поле намагничивания 6 (Фиг. 1) в скин-слое рельса возникают упругие колебания, которые в виде УЗ волн могут озвучивать контролируемое изделие 3б. В зависимости от количества индукторов, находящихся в зоне контакта и вблизи этой зоны, возможно возбуждение нормальных 16 (перпендикулярно к поверхности катания 15 рельса) или наклонных 17 УЗ колебаний (Фиг. 4).
По мере движения тележки 1 по рельсовой колее с рельсами 2а и 2б из множества индукторов 9 в зоне контакта колеса с рельсом последовательно появляются несколько рядом расположенных индукторов. При этом эти индукторы кратковременно находятся на минимальном расстоянии от поверхности 15 контролируемого рельса 2а (и 2б), возбуждая в рельсе УЗ колебания. По мере качения колеса к процессу возбуждения УЗ колебаний последовательно и непрерывно подключаются следующие группы индукторов 9. По известным параметрам тестового колеса (радиус, а значит и длина окружности обода колеса) и скорости сканирования можно определять момент нахождения любого индуктора 9 из их множества в зоне контакта с рельсом.
При этом условную точку отсчета начала окружности колеса можно задать любым известным способом, например, с помощью лазерного луча и отражающей пластины, прикрепленной на внутреннюю сторону тестового колеса, как это предложено в [9]. Зная порядковые номера индукторов, находящихся в зоне контакта можно подключать соответствующие индукторы к генераторно-приемному устройству ЭМА дефектоскопа (на чертеже не показан).
Количество индукторов 9, равномерно размещаемых по периметру тестового колеса, определяется радиусом R колеса, максимально реализуемой скоростью v тележки, минимальной условной протяженностью L дефекта, подлежащего к обнаружению и минимальным количеством N эхо-сигналов от дефекта, достаточных для его достоверного обнаружения (примем, N>4).
Например, при контроле рельсов типа Р65 высотой 180 мм, время пробега возбуждаемых ЭМА преобразованием сдвиговых (поперечных) УЗ колебания по всей высоте рельса (до подошвы рельса и обратно) составляет около 110 мкс. Примем с определенным запасом период T излучения УЗ зондирующих импульсов равным 140 мкс (частота посылок импульсов более 7 кГц (7143 Гц)). При скорости движения тележки v=72 км/ч=20 м/с и радиусе тестового колеса R=525 мм (размер типового железнодорожного колеса) за один цикл излучения/приема УЗ колебаний (равной периоду T) тележка проезжает всего 2,8 мм. В ободе колеса с длиной окружности C=2πR=2*3,14*525=3297 мм разместим 471 индуктор через каждые 7 мм окружности.
При размере каждого индуктора 5×30 мм [9] излученные конкретным индуктором 9 УЗ колебания успевают отразиться от подошвы рельса и вернуться на этот же индуктор. Если задать минимальный условный размер L требуемого к обнаружению дефекта не менее 50 мм, при рассматриваемых выше условиях от искомого дефекта будет принято не менее 7 импульсов, что вполне достаточно для уверенного выявления полезных сигналов на фоне всевозможных помех.
Следует отметить, что кроме участия в процессе излучения/приема УЗ колебаний индукторов 9, находящихся в непосредственном (через тонкий слой компаунда 11) контакте с поверхностью катания 14 контролируемого рельса (Фиг. 2), в процессе формирования УЗ колебаний могут принимать участие и рядом находящиеся индукторы 9, как это показано на Фиг. 4. Так как для них расстояние между индуктором и поверхностью рельса (от долей до нескольких единиц миллиметров) еще достаточно для эффективного возбуждения УЗ колебаний. Причем, чем больше диаметр тестового колеса, тем большее количество индукторов, при прочих равных условиях, будут находиться на расстоянии, приемлемой для эффективного возбуждения УЗ колебаний. Это обстоятельство позволяет путем формирования последовательного возбуждения группы индукторов электронной схемой дефектоскопа (не показана) управлять углом ввода УЗ колебаний в контролируемый рельс (на Фиг. 4 наклонные лучи 17). При этом возможно излучение под переменными или фиксированными углами ввода, реализуя так называемую фазированную антенную решетку (ФАР) [1].
Использование колеса 3б (Фиг. 1) в качестве тестового рассмотрено выше для примера. Аналогично в качестве тестового колеса может быть выполнено колесо 3а тележки 1 на другой нитке пути. В общем случае все 4 колеса (3а, 3б, 4а и 4б) тележки могут быть тестовыми. При этом не требуется изменять систему намагничивания. Магнитное поле, формируемое соленоидами 5 на осях 3 и 4, является общим и достаточным для всех тестовых колес. Это положительное свойство заявляемого технического решения является существенным преимуществом перед прототипом.
Одновременное применение четырех тестовых колес (по 2 колеса на каждую нитку рельсового пути) создает новые возможности по обработке сигналов контроля и способствует дополнительному повышению достоверности контроля рельсов.
Таким образом, заявляемое техническое решение реализуемо, позволяет повысить эффективность возбуждения УЗ колебаний бесконтактным способом за счет увеличения величины и стабильности подмагничивающего поля при существенном упрощении и повышении надежности конструкции тестового колеса.
Предлагаемое техническое решение может быть использовано при создании бесконтактных скоростных систем ультразвуковой дефектоскопии рельсов, обеспечивающих достоверное обнаружение дефектов в сложных условиях контроля (при загрязненных поверхностях катания рельсов, низких температурах и т.п.).
Источники информации
1. Неразрушающий контроль: Справочник: В 8 т. / Под общ. ред. В.В. Клюева. Т. 6. (стр. 40-109 магнитная дефектоскопия). Т. 3. (стр. 72-80 ЭМА возбуждение УЗ). - М.: Машиностроение, 2008 (Т. 3.).
2. Муравьев В.В., Стрижак В.А., Балобанов Е.Н. К расчету параметров системы намагничивания электромагнитно-акустического преобразователя / Измерительная техника, 2011, №1 (17), с. 197-205.
3. Гобов Ю.Л., Михайлов А.В., Смородинский Я.Г. Намагничивающая система для ЭМА-сканера-дефектоскопа / Дефектоскопия, 2014, №11, с. 48-56.
4. Патент РФ 2223487.
5. Патент SU 590660.
6. Патент РФ 2489713.
7. Патент РФ 2299430.
8. Патент D 19544217 A1.
9. Антипов А.Г., Марков А.А. Оценка глубины выявления поперечных трещин магнитодинамическим методом в дефектоскопии рельсов / Дефектоскопия, 2014, №8, с. 57-68.
10. Марков А.А., Антипов А.Г. Возможности магнитодинамического метода дефектоскопии рельсов / Контроль. Диагностика. 2016, №6, с 36-45.
11. Патент RU 10465.
12. Патент RU 2225308.
13. Патент RU 2266225.
14. Патент US 6262573 B1.
15. Марков А.А., Кузнецова Е.К. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. - СПб, Ультра Принт, 2014. - 326 с.
16. Патент RU 2521095.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Намагничивающий узел мобильного рельсового дефектоскопа | 2022 |
|
RU2793187C1 |
| Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2722089C1 |
| Устройства намагничивания для дефектоскопии подошвы рельса | 2020 |
|
RU2745662C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2720043C1 |
| Способ оценки стыковых зазоров рельсов железнодорожного пути | 2022 |
|
RU2793171C1 |
| Устройство магнитной дефектоскопии ободьев колесной пары | 2018 |
|
RU2680857C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |

Изобретение относится к области неразрушающего контроля при реализации ультразвуковых бесконтактных методов дефектоскопии для обнаружения дефектов в рельсах на значительных скоростях сканирования. Устройство электромагнитно-акустического контроля рельсов содержит тестовое колесо с множеством электромагнитно-акустических преобразователей, равномерно размещенных в специальных углублениях в ободе по периметру тестового колеса. Магнитная система электромагнитно-акустических преобразователей выполнена в виде двухосной тележки с размещением соленоидов на осях колесных пар. Соленоиды связаны магнитной цепью с осями колесных пар. Колеса служат полюсами электромагнита и не менее чем одно колесо тележки на каждой рельсовой нити является тестовым, а индукторы электромагнитно-акустических преобразователей закреплены в ободе колеса герметично. В результате повышается эффективность возбуждения ультразвуковых колебаний бесконтактным способом в контролируемом рельсе при значительных скоростях сканирования. 4 ил.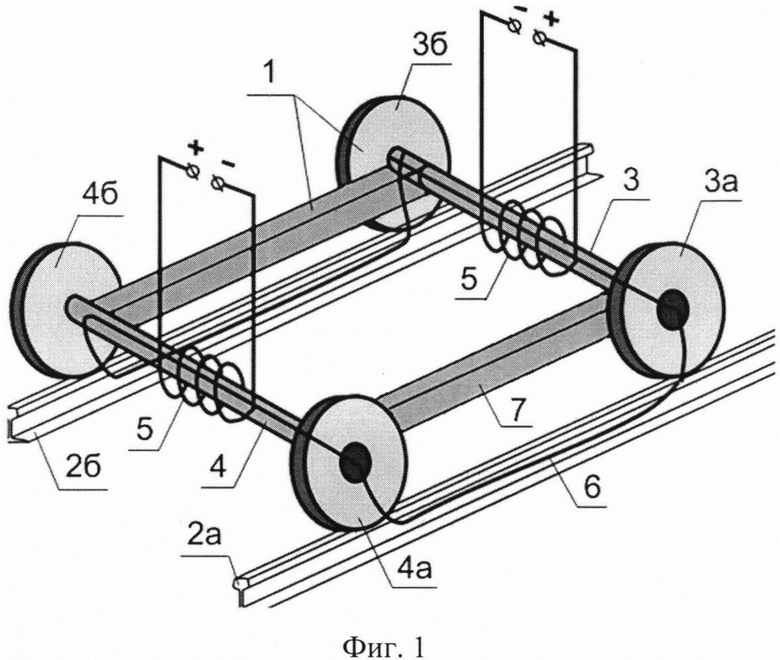
Устройство электромагнитно-акустического контроля рельсов, содержащее тестовое колесо с множеством электромагнитно-акустических преобразователей, равномерно размещенных в специальных углублениях в ободе по периметру тестового колеса, отличающееся тем, что магнитная система электромагнитно-акустических преобразователей выполнена в виде двухосной тележки с размещением соленоидов на осях колесных пар, соленоиды связаны магнитной цепью с осями колесных пар, колеса служат полюсами электромагнита и не менее чем одно колесо тележки на каждой рельсовой нити является тестовым, а индукторы электромагнитно-акустических преобразователей закреплены в ободе колеса герметично.
| УЛЬТРАЗВУКОВОЙ СПОСОБ КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184374C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ РЕЛЬСОВОГО ПУТИ И ПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2487809C2 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2005 |
|
RU2299430C1 |
| Токарный резец | 1924 |
|
SU2016A1 |

