Изобретение относится к области приборостроения и предназначено для подвеса оптических устройств, более конкретно, кино- и видеокамер на подвижных основаниях.
Известен подвес дистанционно управляемой киносъемочной головки (Пат. США 6,354,750 Int.Cl. G03B 17/00, 2002), содержащий платформу, на которой установлена камера, наружную и промежуточную рамы подвеса с ортогональными в среднем положении осями вращения, пересекающимися в одной точке, приводы вращения рам и платформы, связанные с выходом источника сигнала управления.
Наиболее близким по технической сущности и заявляемому результату является подвес трехосного гироскопического стабилизатора для кино- и телевизионных камер (Пат. США 5,868,031 Int.Cl. G01C 19/04, 1999). Подвес данного гиростабилизатора содержит платформу, на которой установлена камера, наружную и промежуточную рамы подвеса с ортогональными в среднем положении осями вращения, пересекающимися в одной точке, приводы вращения рам и платформы, связанные с выходом источника сигнала управления. Недостатком данного устройства является несимметричность конструкции наружной рамы подвеса относительно оси ее вращения и расположение привода вращения промежуточной рамы с тыльной стороны камеры. Это приводит к смещению центра масс наружной рамы относительно оси ее вращения. При ускоренном движении места установки подвеса (операторский кран, автомобиль, катер и т.п.) возникают моменты несбалансированности вокруг оси вращения этой рамы, что приводит к возникновению ошибок углового положения платформы относительно положения, задаваемого источником сигнала управления, и ухудшению качества отснятого материала.
Несимметричность конструкции наружной и промежуточной рам подвеса вокруг оси наружной рамы является также причиной аэродинамической асимметрии подвеса с камерой относительно этой оси, что при наличии ветровой нагрузки при проведении съемок на открытом воздухе или при движении автомобиля или катера с установленным на них подвесом также приводит к повышению аэродинамических возмущающих моментов и к увеличению ошибок углового положения платформы и снижению качества отснятого материала.
Кроме того, в данном устройстве промежуточная ось вращения подвеса и установленные на ней приводы вращения промежуточной рамы конструктивно находятся позади камеры, что накладывает ограничения на продольный размер камеры с объективом, устанавливаемой на платформу, затрудняет доступ к камере и кассете при обслуживании, сужает технические возможности подвеса, не позволяя использовать широкую линейку длиннофокусных объективов и другие оптические устройства, устанавливаемые перед объективом камеры (солнечные бленды, компендиум и др.).
Задачей изобретения является повышение точности поддержания углового положения камеры путем снижения возмущающих моментов, создаваемых подвесом, и расширение технических возможностей подвеса, улучшение эксплуатационных характеристик подвеса.
Технический результат состоит в снижении возмущающих моментов, создаваемых подвесом, вследствие симметричного конструктивного исполнения наружной и промежуточной рам подвеса и расположения конструктивных элементов подвеса таким образом, что они не ограничивают продольный размер камеры с объективом, устанавливаемой на платформу.
Для достижения указанного технического результата в трехосном подвесе камеры, содержащем платформу, на которой установлена камера, наружную и промежуточную рамы подвеса с ортогональными в среднем положении осями вращения, пересекающимися в одной точке, приводы вращения рам и платформы, связанные с выходами источника сигнала управления, промежуточная рама подвеса выполнена в виде механического параллелограмма, включающего подвижно соединенные основание параллелограмма, шатун и два кривошипа, с осями вращения параллельными оси вращения промежуточной рамы, причем основание параллелограмма связано с наружной рамой подвеса с возможностью поворота вокруг оси, параллельной оси промежуточной рамы подвеса и пересекающейся с ней, на каждом кривошипе закреплено одним концом с возможностью вращения вокруг оси, параллельной осям вращения кривошипов, подвижное механическое звено, вторые концы каждого подвижного механического звена закреплены с возможностью вращения вокруг оси, параллельной осям вращения кривошипов, на наружной раме таким образом, что сочлененные наружная рама подвеса, основание параллелограмма, два подвижных механических звена и кривошипы образуют два механических параллелограмма, платформа закреплена на шатуне с возможностью вращения, а ось вращения платформы перпендикулярна осям вращения шатуна относительно кривошипов и пересекается с ними.
На чертеже 1 изображена кинематическая схема подвеса камеры.
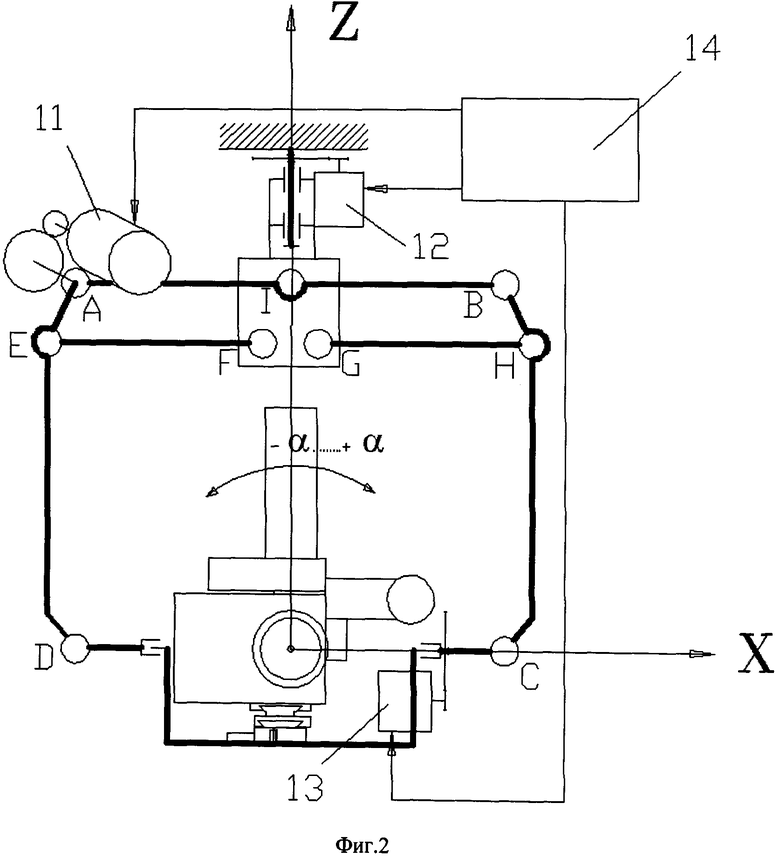
На чертеже 2 изображена упрощенно плоская кинематическая схема подвеса с промежуточной рамой подвеса в среднем положении с приводами вращения 11, 12, 13 и источником сигнала управления 14.
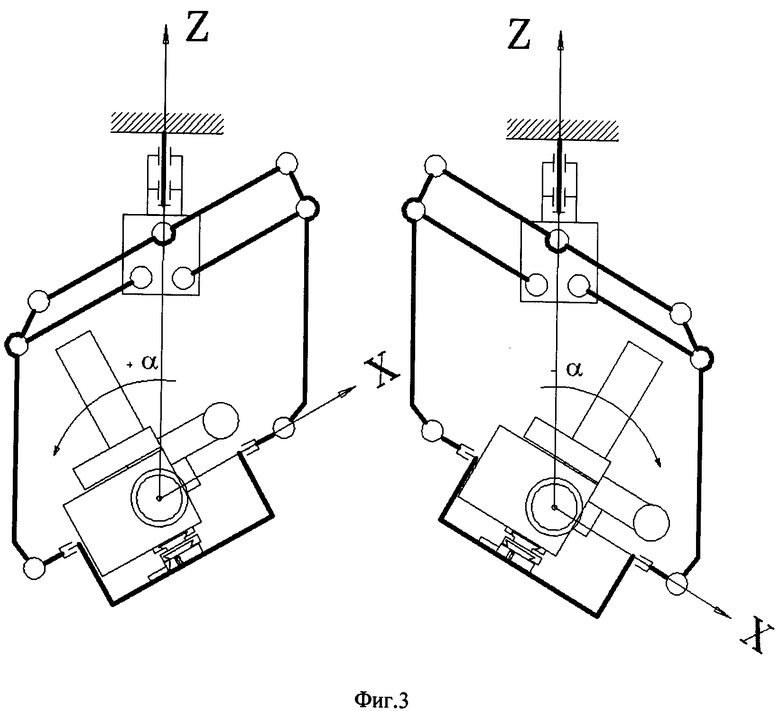
На чертеже 3 изображена упрощенно плоская кинематическая схема подвеса с промежуточной рамой подвеса в двух произвольных положениях по углу поворота промежуточной рамы.
Подвес содержит наружную раму 1, промежуточную раму и платформу 2, на которой закреплена камера 3. Наружная рама 1 подвеса имеет одну угловую степень свободы вокруг оси Z вращения рамы 1.
Промежуточная рама выполнена в виде механического параллелограмма ABCD, включающего основание 4 параллелограмма (АВ), кривошипы 5 (ВС), 6 (AD) и шатун 7 (CD). Платформа 2 закреплена на шатуне 7 с возможностью вращения, ось вращения платформы 2 относительно шатуна 7 перпендикулярна осям вращения шатуна 7 относительно кривошипов 5 и 6 (шарниры D и С) и пересекается с ними. Основание 4 параллелограмма закреплено на наружной раме 1 с возможностью вращения вокруг оси, параллельной оси промежуточной рамы (шарнир I), которая пересекается с осью наружной рамы 1. На кривошипах 5 и 6 установлены подвижные механические звенья 9 (EF) и 10 (GH) соответственно с возможностью вращения одних концов механических звеньев 9 и 10 вокруг оси, параллельной оси промежуточной рамы. Вторые концы механических звеньев 9 и 10 закреплены на наружной раме 1 с возможностью вращения вокруг осей, также параллельных оси промежуточной рамы (шарниры F и G). Расположение осей вращения концов подвижных механических звеньев 9, 10 на кривошипах 5, 6 и наружной раме 1 таково, что они вместе образуют еще два параллелограмма: AIEF и IBGH.
На оси вращения наружной рамы 1 установлен привод 11 вращения наружной рамы 1.
На оси вращения одного из звеньев промежуточной рамы установлен привод 12 вращения промежуточной рамы.
На оси вращения платформы 2 установлен привод 13 вращения платформы 2. Входы приводов вращения 11, 12, 13 связаны с выходами источника 14 сигнала управления.
Оси подвеса X, Y, Z пересекаются в одной точке и ортогональны в среднем положении.
Работа устройства происходит следующим образом. Вращение наружной рамы 1 вместе элементами промежуточной рамой (4, 5, 6, 7, 9, 10) и платформой 2 с камерой 3 происходит вокруг оси наружной рамы Z. Это обеспечивает платформе 2 и камере 3 одну угловую степень свободы - вокруг оси Z. Для разворота камеры вокруг оси Y необходимо повернуть шатун 7, что обеспечивается кинематикой механического параллелограмма ABCD, при этом на такой же угол поворачивается основание 4 параллелограмма относительно наружной рамы 1. Это обеспечивает платформе 2 с камерой 3 вторую угловую степень свободы. При этом оси Y и Z ортогональны и пересекаются в точке, которая находится на линии, соединяющей оси шарниров D и С параллелограмма ABCD (Фиг.2.) и перпендикулярной этим осям. С этой линией совпадает ось вращения камеры 2 относительно шатуна 7, вокруг которой платформа 2 с камерой 3 имеют третью угловую степень свободы.
Подвижные кинематические звенья 9, 10 с опорами вращения Е и Н на кривошипах 5, 6 и опорами вращения F и G на наружной раме 1 ограничивают движение кривошипов 5, 6 вокруг осей, параллельных оси Y в шарнирах А, В, С, D. В связи с тем, что шарнирные соединения наружной рамы 1, основания 4, кривошипов 5, 6 и подвижных кинематических звеньев 9, 10 представляют собой механические параллелограммы AIEF и IBGH, то эти ограничения сводятся к тому, что кривошипы 5, 6 всегда сохраняют неизменную угловую ориентацию относительно наружной рамы 1 при поворотах основания 4 и шатуна 7 относительно наружной рамы 1. То есть при разворотах платформы 2 и камеры 3 вокруг оси Y кривошипы 5, 6 движутся поступательно.
При вращении подвеса вокруг оси Y (Фиг.3.) сохраняется неизменным положение точки пересечения осей вращения рам подвеса и платформы 2 относительно места установки 8 подвеса.
Поворот наружной рамы 1 относительно места 8 установки подвеса осуществляется с помощью привода 12, управляемого по сигналам источника 14 сигнала управления.
Поворот основания 4 параллелограмма, шатуна 7 и перемещение связанных с ними элементов промежуточной рамы относительно наружной рамы 1 происходит с помощью привода 11, управляемого источником 14 сигнала управления. При этом привод 11 может устанавливаться таким образом, чтобы обеспечивать относительное вращение элементов промежуточной рамы вокруг оси Y (и приложение момента к платформе вокруг этой же оси) в любом из шарниров промежуточной рамы - А, В, С, D, Е, F, G, Н, I, в которых происходит относительный поворот при вращении промежуточной рамы.
Разворот платформы 2 и камеры 3 относительно промежуточной рамы происходит вокруг оси X, при этом платформа 2 и камера 3 поворачиваются относительно шатуна 7 на необходимый угол. Это вращение и приложение управляющего момента к платформе вокруг оси Х осуществляется с помощью привода 13, управляемого источником 14 сигнала управления.
Сигналы управления, поступающие на входы приводов 11, 12, 13 и задающие угловое положение камеры, могут формироваться таким же образом, как это реализовано в указанных выше аналоге или прототипе.
Платформа 2 с камерой 3 «висит» на параллелограмме ABCD и образует вокруг оси Y маятник с расстоянием от его оси качания, равным расстоянию между шарнирами В и С, А и D. При действии ускорения вдоль оси Х возникают моменты, стремящиеся повернуть кривошипы 5, 6 относительно наружной рамы 1. Однако параллелограммы AIEF и IBGH не позволяют осуществить этот поворот. При этом маятниковый момент вокруг оси I из-за действия ускорений вдоль оси Х компенсируется моментами от сил растяжения и сжатия механических звеньев 9 и 10, и момент вокруг оси Y промежуточной рамы, приложенный к платформе 2 с камерой 3, отсутствует.
Балансировка подвеса может проводиться в три этапа. Сначала для обеспечения сбалансированности подвеса вокруг оси Х общий центр масс камеры 3 и платформы 2 должен быть совмещен с осью X.
Затем общий центр масс камеры 3 и платформы 2 должен перемещаться вдоль оси Х до тех, пока не будет сбалансирована промежуточная рама совместно с платформой 2 и камерой 3 вокруг оси, параллельной оси Y и проходящей через шарнир I, в положение, когда ось Z вертикальна (рис.2.).
Далее для обеспечения сбалансированности подвеса вокруг оси Z, необходимо совместить общий центр масс элементов промежуточной рамы и наружной рамы 1 с осью Z подвеса, не изменяя при этом положение камеры 3 на платформе 2, и, не перемещая центр масс промежуточной рамы вдоль оси X, чтобы не нарушить балансировку вокруг осей Х и Y.
Симметричное конструктивное исполнение наружной и промежуточной рам вокруг оси вращения наружной рамы подвеса позволяет снизить теоретически до нуля моменты небаланса вокруг оси наружной рамы и значительно уменьшить моменты из-за аэродинамической асимметрии подвеса вокруг оси наружной рамы, создаваемые при установке подвеса на движущемся автомобиле, катере, операторском кране, и тем самым обеспечить уменьшение ошибок углового положения платформы относительно задаваемого источником сигнала управления и улучшение качества отснятого камерой материала.
Перенос опор вращения промежуточной рамы, располагавшихся ранее с тыльной стороны камеры, на элементы промежуточной рамы, расположенные по бокам и сверху камеры, расширяет технические возможности подвеса за счет отсутствия ограничений на продольный размер камеры с объективом, которые можно устанавливать на платформу, и улучшает доступ к камере для ее обслуживания в процессе эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвес трехосного гиростабилизатора киноаппарата | 1981 |
|
SU989321A1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2016 |
|
RU2619136C1 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2016 |
|
RU2619135C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2005 |
|
RU2300128C1 |
| Стенд гармонических колебаний | 1990 |
|
SU1740829A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
Изобретение относится к области приборостроения и предназначено для подвеса оптических устройств, более конкретно, кино- и видеокамер на подвижных основаниях.
Заявленный трехосный подвес камеры содержит платформу, наружную и промежуточную рамы подвеса с ортогональными в среднем положении пересекающимися осями вращения, приводы вращения рам и платформы, связанные с источником сигнала управления. Промежуточная рама подвеса выполнена в виде механического параллелограмма, включающего подвижно соединенные основание параллелограмма, шатун и два кривошипа, с осями вращения параллельными оси вращения промежуточной рамы. На каждом кривошипе закреплено одним концом подвижное механическое звено. Вторые концы каждого подвижного механического звена закреплены с возможностью вращения вокруг оси, параллельной осям вращения кривошипов. Сочлененные наружная рама подвеса, основание параллелограмма, два подвижных механических звена и кривошипы представляют собой также два параллелограмма. Платформа закреплена на шатуне с возможностью вращения, а ось вращения платформы перпендикулярна осям вращения шатуна относительно кривошипов и пересекается с ними.
Технический результат, достигаемый от реализации заявленного изобретения, заключается в повышении точности поддержания углового положения платформы и камеры в подвесе, улучшении эксплуатационных характеристик подвеса, в расширении его технических возможностей, а именно в снижении возмущающих моментов, создаваемых подвесом, вследствие симметричного конструктивного исполнения наружной и промежуточной рам подвеса и расположения конструктивных элементов подвеса таким образом, что они не ограничивают продольный размер камеры с объективом, устанавливаемой на платформу. 3 ил.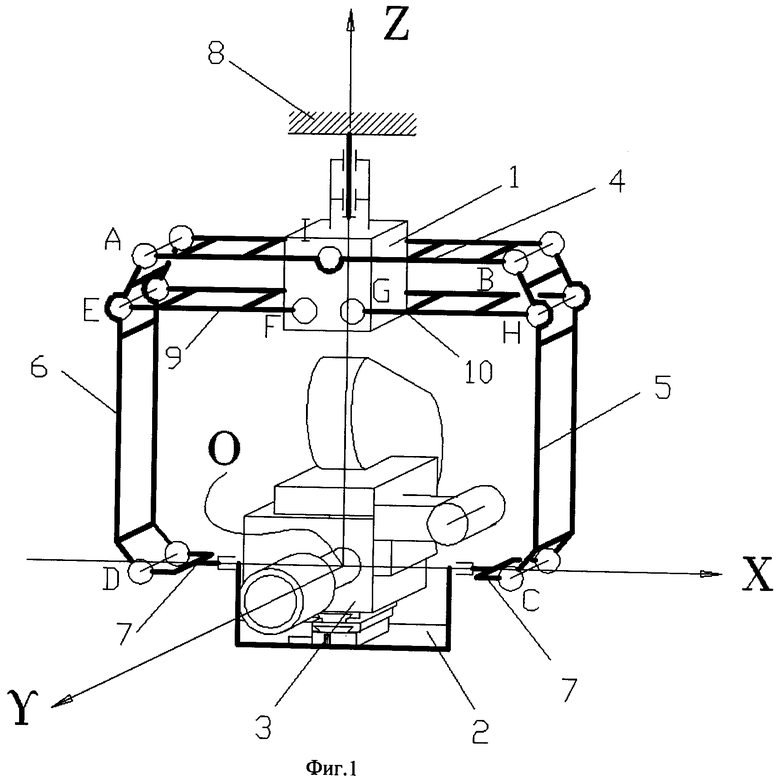
Трехосный подвес камеры, содержащий платформу, на которой установлена камера, наружную и промежуточную рамы подвеса с ортогональными в среднем положении осями вращения, пересекающимися в одной точке, приводы вращения рам и платформы, связанные с выходами источника сигнала управления, отличающийся тем, что промежуточная рама подвеса выполнена в виде механического параллелограмма, включающего подвижно соединенные основание параллелограмма, шатун и два кривошипа, с осями вращения, параллельными оси вращения промежуточной рамы, причем основание параллелограмма связано с наружной рамой подвеса с возможностью поворота вокруг оси, параллельной оси промежуточной рамы подвеса и пересекающейся с ней, на каждом кривошипе закреплено одним концом с возможностью вращения вокруг оси, параллельной осям вращения кривошипов, подвижное механическое звено, вторые концы каждого подвижного механического звена закреплены с возможностью вращения вокруг оси, параллельной осям вращения кривошипов, на наружной раме таким образом, что сочлененные наружная рама подвеса, основание параллелограмма, два подвижных механических звена и кривошипы образуют два механических параллелограмма, платформа закреплена на шатуне с возможностью вращения, а ось вращения платформы перпендикулярна осям вращения шатуна относительно кривошипов и пересекается с ними.
| US 5868031 A, 09.02.1999 | |||
| Подвес трехосного гиростабилизатора киноаппарата | 1981 |
|
SU989321A1 |
| US 4341452 A, 27.07.1982. | |||

