Изобретение относится к робототехнике и может найти применение в хирургической медицине, обрабатывающих центрах, автоматических технологических и сборочных линиях в машиностроении в приводах машин с вращательным рабочим органом.
Известен платформенный манипулятор с тремя степенями свободы, содержащий опорное основание и подвижную платформу соединенные между собой через три параллельно установленных в пространстве вокруг подвижной платформы открытые кинематические цепи с трехподвижными сферическими шарнирами (схема платформенного манипулятора показана в статье: Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры». Вестник Сибирского государственного аэрокосмического университета. 2012. Вып. 4, с. 46-50, рис. 1) - аналог.
Недостатками известного платформенного манипулятора являются:
1) Сложная конструкция изготовления и сборки сферических шарниров, требующих очень точного пересечения всех трех осей в одной точке и для всех внутренних и наружных сферических поверхностей (US Patent No. 4,628,765/1986).
2) Ограниченная эксплуатационная эффективность из-за возможности привода только одного рабочего органа в виде перемещаемой подвижной платформы.
3) Большие пространственные габариты манипулятора в его рабочем положении, а также при транспортировке и хранении на складе.
4) Ограниченная до нуля узким конусом рабочая зона перемещения рабочего органа манипулятора (рис. 4 в указанной статье Мирзаева Р.А.).
Наиболее близким, по технической сущности и достигаемому эффекту, к предлагаемому изобретению является параллельный манипулятор с тремя степенями свободы, содержащий опорное основание и выходное звено с установленными на нем рабочим органом, кинематически связанные между собой через шарнирно-рычажное устройство подвижных звеньев, которое выполнено в виде трех параллельно установленных в пространстве вокруг подвижной платформы открытых кинематических цепей, содержащий кинематические пары со взаимно-перпендикулярными между собой осями вращения - прототип (статья Huda S, Takeda Y., "Dimensional Syuthesis of 3-URU Pure Rotational Parallel Mechanism with Respect to Singularity and Workspace", 12th IFToMM World Congress, Besancon (France), June 18-21, 2007, Fig. 1. Kinematic diagram of the 3-URU mechanism).
Недостатками указанного параллельного манипулятора являются:
1) Низкая эксплуатационная эффективность из-за возможности привода тремя двигателями только одного рабочего органа в виде подвижной платформы.
2) Сложная конструкция трех многозвенных кинематических цепей из-за взаимно-перпендикулярных осей вращения кинематических пар, а также двигателей.
3) Большие пространственные габариты манипулятора и ограниченная зонами возникающей неуправляемости и заклинивания (singularity) узкая рабочая область (workspace).
4) Сложная система точного управления манипулятором из-за расположения осей всех трех приводов платформы под углом к осям декартовой системы координат и связанной кинематики задаваемых движений трех двигателей.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, снижении габаритов манипулятора и расширении его рабочей зоны, а также повышении его эксплуатационной эффективности за счет раздельного привода нескольких разных рабочих органов без увеличения числа приводных двигателей, что упрощает управлении манипулятором.
Получении технического результата достигается за счет того, что в параллельном 3-RRR манипуляторе с тремя степенями свободы шарнирно-рычажное устройство подвижных звеньев выполнено в виде многократного шарнирного параллелограмма, состоящего из установленных в одной плоскости и соединенных между собой трех шарнирных параллелограммов с общими смежными звеньями, из которых первый и второй шарнирные параллелограммы выполнены с общим смежным шатуном, а второй и третий шарнирные параллелограммы выполнены с общим смежным кривошипом и кинематически связаны между собой через вращательные кинематические пары с параллельными осями углового поворота.
Сущность изобретения появляется чертежами (фиг. 1, фиг. 2, фиг. 3 и фиг. 4).
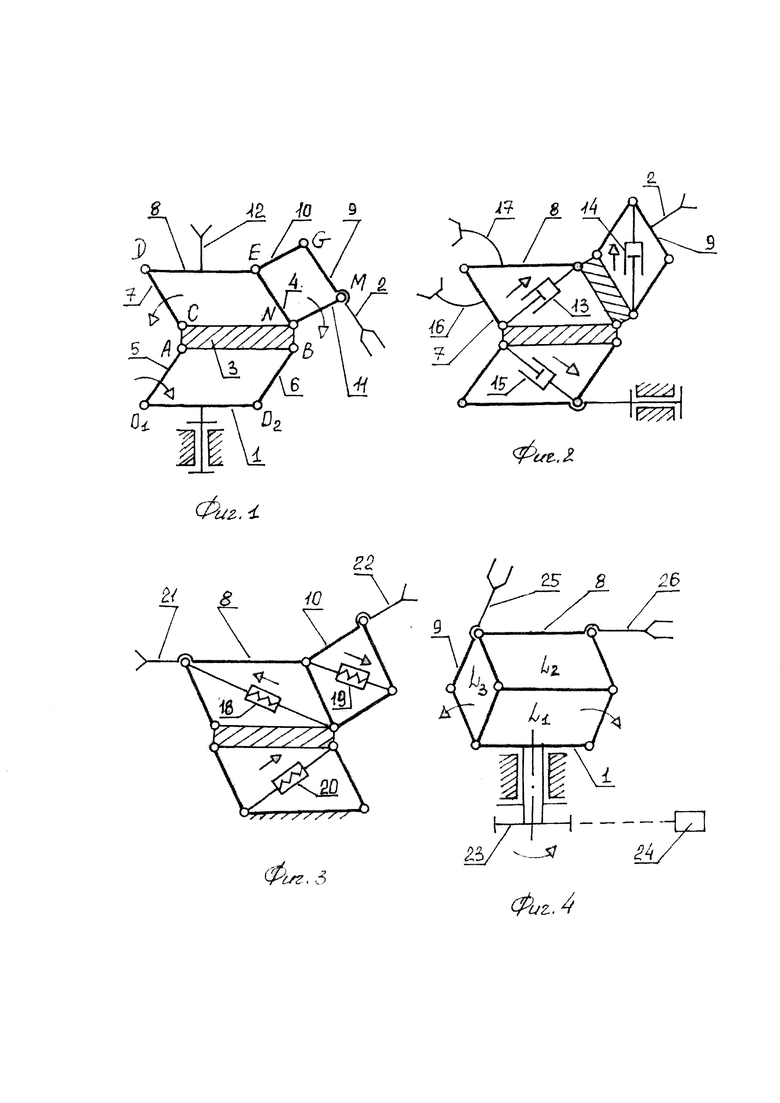
На фиг. 1 изображен общий вид параллельного 3-RRR манипулятора с тремя степенями свободы, содержащего опорное основание 1 и выходное звено с установленными на нем рабочим органом 2, которые кинематически связаны между собой через шарнирно-рычажное устройство подвижных звеньев в виде многократного шарнирного параллелограмма, состоящего из установленных в одной плоскости и соединенных между собой трех шарнирных параллелограммов O1ABO2, CDEN и EGMN с общими смежными звеньями 3 и 4, из которых первый и второй параллелограммы O1ABO2 и CDEN и выполнены с общим смежным шатуном 3, а второй и третий параллелограммы CDEN и EGMN выполнены с общим смежным кривошипом 4, кинематически связаны между собой через вращательные кинематические пары с параллельными осями углового поворота. Каждый из трех шарнирных параллелограммов на фиг. 1 выполнен соответственно с приводной вращательной кинематической парой O1, C и N, соединенной с отдельным вращательным приводом.
Первый шарнирный параллелограмм O1ABO2 состоит из опорного основания 1, двух параллельных кривошипов 5 и 6, соединенных между собой общим смежным шатуном 3. Второй шарнирный параллелограмм CDEN состоит из кривошипа 7 и шатуна 8, образующих замкнутый четырехзвенник через общий смежный шатун 3 и общий смежный кривошип 4. Третий шарнирный параллелограмм EGMN состоит из шатуна 9, который через параллельные кривошип 10 и 11 шарнирно соединен с общим смежным кривошипом 4. В варианте манипулятора на фиг. 1 рабочий орган 2 закреплен на шатуне 9 параллелограмма EGMN и установлен параллельно его противоположной стороне EN. Также 3-RRR манипулятор может быть снабжен дополнительным рабочим органом 12, установленным, например, на шатуне 8 и поэтому совершающим плоскопараллельное движение относительно опорного основания 1.
На фиг. 2 представлен вариант выполнения параллельного 3-RRR манипулятора с поступательным приводом в виде установленных по диагонали каждого из шарнирных параллелограммов соответственно приводных подвижных гидро- или пневмоцилиндров 13, 14 и 15 для требуемого перемещения в рабочем пространстве трех рабочих органов, из которых один рабочий орган закреплен на шатуне 9, а два других рабочих органа 16 и 17 закреплены на смежных между собой кривошипе 7 и шатуне 8.
На фиг. 3 представлен вариант выполнения параллельного 3-RRR манипулятора с установленными по диагонали каждого из шарнирных параллелограммов винтовыми кинематическими парами 18, 19 и 20 для относительного манипулирования двумя рабочими органами 21 и 22, закрепленными на смежных между собой шатуне 8 и кривошипе 10.
На фиг. 4 представлен вариант выполнения параллельного 3-RRR манипулятора с установкой опорного основания 1 с многократным шарнирным параллелограммом (кинематическая цепь которого содержит три замкнутых контура L1, L2 и L3) на поворотную платформу 23, выполненную с возможностью полного поворота дополнительным вращательным приводом 24. При установке двух рабочих органов 25 и 26 соответственно на шатун 8 и шатун 9, заданная ориентация этих рабочих органов при их плоскопараллельном движении сохраняется во всем рабочем пространстве данного манипулятора.
Работа представленного параллельного 3-RRR манипулятора заключается в следующем:
1) При раздельной работе каждого из установленных в отдельных шарнирных параллелограммах O1ABO2, CDEN и EGMN (фиг. 1) вращательного, поступательного или винтового приводов (с использование приводных вращательных, поступательных и винтовых кинематических пар) обеспечивается вращательное движение выходного звена манипулятора вокруг только одной из параллельных вращательным парам разных осей вращения. Это обеспечивает кинематическую развязку, что упрощает управление и повышает точность позиционирования рабочего органа.
2) При совместной работе приводов, установленных в отдельных шарнирных параллелограммах O1ABO2, CDEN и EGMN, обеспечивается плоскопараллельное движение выходного звена манипулятора при сохранении заданной ориентации рабочего органа (например, параллельно основанию того параллелограмма, на шатуне которого был закреплен этот рабочий орган).
3) Установка нескольких рабочих органов на смежные звенья указанных трех шарнирных параллелограммов обеспечивает возможность согласованного выполнения нескольких технологических операций (например, зажима обрабатываемой детали).
4) Установка на поворотную платформу плоского 3-RRR манипулятора с тремя степенями свободы позволяет совместить компактность данной конструкции (фиг. 1) в одной плоскости ориентирующих движений с увеличенным до объемного цилиндра (за счет полного поворота платформы на 360°) рабочим пространством манипулятора.
Достигаемый в предлагаемом 3-RRR манипуляторе положительный эффект заключается в следующем:
1. Компактность манипулятора в рабочем положении и при его транспортировке.
2. Сохранение заданной ориентации рабочего органа в пространстве его движений.
3. Повышение эксплуатационной эффективности за счет согласованного привода нескольких разных рабочих органов без увеличения числа приводных двигателей.
4. Упрощение конструкции устройства приводных звеньев за счет применения всех предельно простых вращательных кинематических пар с параллельными осями.
5. Расширение рабочей зоны, упрощение управления и повышение точности позиционирования за счет раздельной кинематики ориентирующих движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
Изобретение относится к робототехнике и может быть использовано в хирургической медицине, в обрабатывающих центрах и автоматических линиях в машиностроении. Манипулятор содержит опорное основание, кинематически связанное посредством шарнирно-рычажного устройства с выходным звеном. Шарнирно-рычажное устройство выполнено в виде многократного шарнирного параллелограмма, состоящего из расположенных в одной плоскости и соединенных посредством вращательных кинематических пар трех шарнирных параллелограммов. Первый параллелограмм образован опорным основанием и двумя кривошипами, соединенными шатуном, образующим с двумя кривошипами и шатуном второй шарнирный параллелограмм. Один кривошип второго параллелограмма образует с шатуном, шарнирно соединенным с ним посредством двух кривошипов, третий шарнирный параллелограмм. Кинематическая вращательная пара каждого параллелограмма соединена с приводом. В результате обеспечивается упрощение конструкции и сокращение габаритов манипулятора и повышение его эксплуатационной эффективности за счет раздельной кинематики управления несколькими рабочими органами. 6 з.п. ф-лы, 4 ил.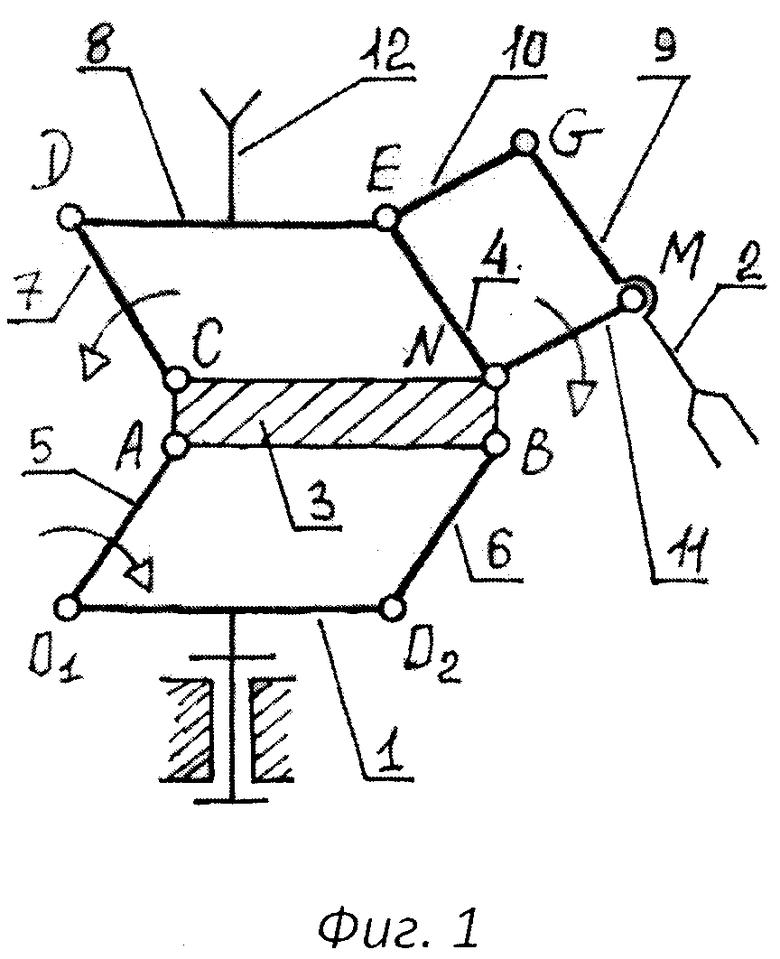
1. Параллельный манипулятор с тремя степенями свободы, содержащий опорное основание, кинематически связанное посредством шарнирно-рычажного устройства с выходным звеном, отличающийся тем, что шарнирно-рычажное устройство выполнено в виде многократного шарнирного параллелограмма, состоящего из расположенных в одной плоскости и соединенных между собой посредством вращательных кинематических пар с параллельно расположенными осями углового поворота трех шарнирных параллелограммов, из которых первый шарнирный параллелограмм образован опорным основанием и двумя кривошипами, соединенными между собой шатуном, образующим с двумя кривошипами и шатуном второй шарнирный параллелограмм, один из кривошипов которого образует с шатуном, шарнирно соединенным с ним посредством двух кривошипов, третий шарнирный параллелограмм, при этом кинематическая вращательная пара каждого шарнирного параллелограмма соединена с приводом.
2. Манипулятор по п.1, отличающийся тем, что привод выполнен в виде установленного по диагонали шарнирного параллелограмма гидроцилиндра или пневмоцилиндра.
3. Манипулятор по п.1, отличающийся тем, что привод выполнен в виде установленной по диагонали шарнирного параллелограмма приводной винтовой кинематической пары.
4. Манипулятор по п.1, отличающийся тем, что он снабжен поворотной платформой, выполненной с возможностью осуществления полного поворота от вращательного двигателя, а опорное основание установлено на упомянутой поворотной платформе.
5. Манипулятор по п.1, отличающийся тем, что шатун третьего шарнирного параллелограмма выполнен с возможностью закрепления на нем рабочего органа.
6. Манипулятор по п.1, отличающийся тем, что кривошип второго шарнирного параллелограмма выполнен с возможностью закрепления на нем рабочего органа.
7. Манипулятор по п.1, отличающийся тем, что смежные между собой шатун второго шарнирного параллелограмма и кривошип третьего шарнирного параллелограмма выполнены с возможностью закрепления на них рабочих органов.
| US 10710249 B2, 14.07.2020 | |||
| Пресс для оттяжки и заутюжки стойки подворотника мужского пальто | 1960 |
|
SU133043A1 |
| Круговая делительная машина | 1956 |
|
SU115708A1 |
| Приспособление для арретирования подвижной системы переносных электрических измерительных приборов | 1929 |
|
SU20725A1 |
| US 8839690 B2, 23.09.2014. | |||

