Изобретение относится к машиностроению, и в частности к шарнирно-рычажным приводам рабочих органов машин и может найти применение в различных областях техники, например, в пусковых установках летательных аппаратов и системах наведения, роботах и манипуляторах с несколькими рабочими органами, экскаваторах и погрузчиках, вибросмесителях и управляемых антеннах радиолокаторов.
Известен механизм шарнирного параллелограмма, в котором одна из 4-х его сторон выполнена в виде неподвижной стойки, две другие стороны являются ведущим и ведомым кривошипами, соединенными между собой через единственный шатун (Крайнев А.Ф. «Механика машин. Фундаментальный словарь», - М.: Машиностроение, 2000 г., с. 158 рис. (в), с. 356-357) - аналог №1.
Недостатками указанного аналога №1 являются ограниченные функциональные возможности передачи вращения только на один рабочий орган и только с постоянной скоростью вращения ведущего вала, а также наличие мертвых неуправляемых положений дважды за цикл поворота на 360 градусов.
Также известен механизм двойного шарнирного параллелограмма, в котором ведущий и ведомый рычаги выполнены в виде трехшарнирных кривошипов, кинематически связанных между собой через два (всегда параллельных стойке) шатуна для образования передаточного механизма только с одинаковыми угловыми скоростями входа и выхода (патент SU 1810678, 1985 г., Джуматаев М.С. и др.) - аналог №2.
Недостатками указанного аналога №2 являются ограниченные функциональные возможности вращения рабочего органа и возникновение в таком механизме вредных избыточных связей, приводящих к повышенному трению, износу и снижению срока службы механизма (книга Решетов Л.Н. «Самоустанавливающиеся механизмы: Справочник конструктора. - М. Машиностроение, 1979, с. 8-24»).
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является механизм шарнирного параллелограмма, содержащий замкнутую кинематическую цепь, включающую опорное основание в виде стойки, два кривошипа обязательно одинаковой длины (являющиеся сторонами этого параллелограмма), соединяющих их шатун (который может быть расположен только параллельно стойке) и сблокированных с указанными кривошипами зубчатых секторов (которые создают жесткие удары для прохождения мертвых положений), выполненных разного диаметра (Ярошенко В.П. Авторское свидетельство на изобретение №877176, СССР, Бюл. Изобретений №40 от 30.10.1981 г.) - прототип.
Недостатками известного механизма шарнирного параллелограмма являются:
1. Низкая функциональность и ограниченные области применения в разных областях техники (из-за возможности его применения только для передачи вращения между двумя валами), где кривошип могут быть только одинаковой длины, а ведомый вал может быть может вращаться только в том же направлении и с той же угловой скоростью, что и ведущий вал (так как механизм данного параллелограмма имеет только одну управляемую степень свободы).
2. Низкая надежность работы механизма шарнирного параллелограмма, снижающая срок его службы из-за постоянных жестких ударов и динамических нагрузок от соударемых зубчатых прерывистых секторов, происходящих 2 раза за цикл поворота на каждые 360 градусов в крайних положениях данного параллелограмма.
В основу изобретения положена техническая задача, заключающаяся в расширении функциональности механизма шарнирного параллелограмма и исключении при его работе неуправляемых мертвых положений, ограничивающих его рабочее пространство. Решение указанной технической задачи достигается за счет увеличения числа Wy управляемых степеней свободы механизма шарнирного параллелограмма выполнения всех четырех сторон шарнирного параллелограмма в виде самоустанавливающихся между собой (т.е. плавающих относительно опорного основания) шатунов, выполненных с возможностью закрепления на них нескольких отдельных рабочих органов с приводом от увеличенного числа ведущих звеньев (равного величине Wy).
Получение технического результата достигается за счет того, что шарнирный параллелограмм составлен из четырех многошарнирных шатунов, кинематически связанных между собой и с опорным основанием через цилиндрические шарниры с вращательными кинематическими парами, и поворотных кривошипов, собираемых между собой в многосторонние изменяемые замкнутые контуры кинематической цепи с установкой в упомянутые контуры приводных вращательных, поступательных или винтовых кинематических пар, для образования четырехшатунного шарнирного параллелограмма с различным числом Wy управляемых степеней свободы.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6. фиг. 7, фиг. 8. фиг. 9, фиг. 10 и фиг. 11.
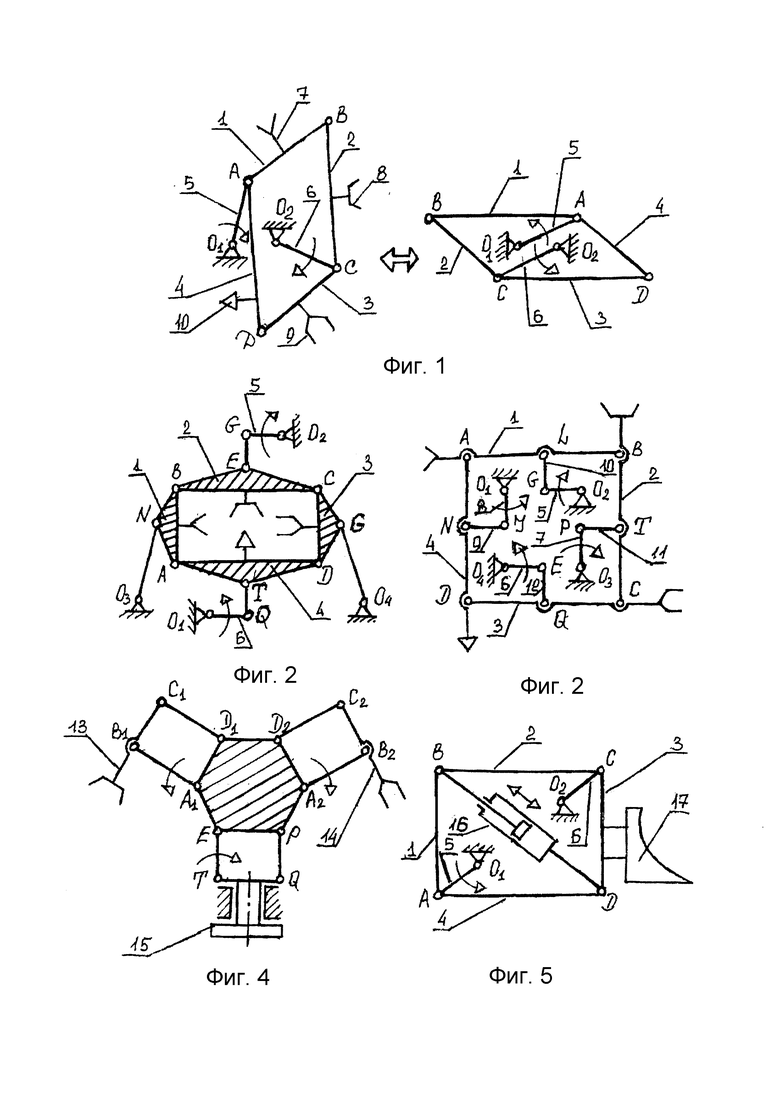
На фиг. 1 изображен общий вид механизма плавающего шарнирного параллелограмма, содержащего опорное основание O1O2 и замкнутую кинематическую цепь рычажных звеньев, включающую четырехшатунный шарнирный параллелограмм ABCD, составленный из четырех двухшарнирных шатунов 1, 2, 3 и 4, кинематически связанных между собой и с опорным основанием через цилиндрические шарниры O1, O2, А, В, С, D и поворотных кривошипов 5 и 6, собираемых между собой в изменяемые замкнутые контуры кинематической цепи, обладающей двумя управляемыми степенями свободы Wy=2 и содержащей две приводные вращательные кинематические пары O1 и O2. Поворотные кривошипы 5 и 6 соединены с четырехшатунным шарнирным параллелограммом ABCD через двойные цилиндрические шарниры А и С.выполненные с параллельными осями вращения. Каждый из четырех шатунов 1, 2, 3 и 4 плавающего шарнирного параллелограмма ABCD выполнен с возможностью закрепления на них отдельного рабочего органа 7, 8, 9 и 10.
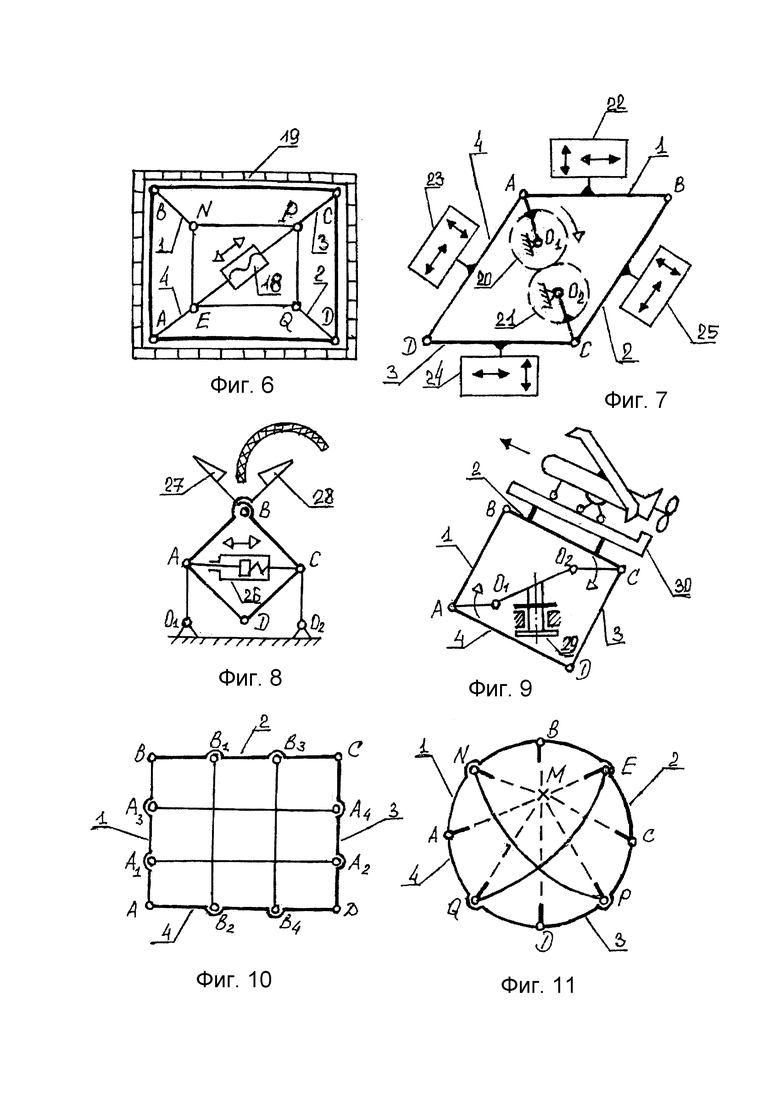
На фиг. 2 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, в котором все шатуны плавающего шарнирного параллелограмма, в котором все шатуны 1, 2, 3 и 4 упомянутого параллелограмма выполнены в виде трехшарнирных соединительных рычагов с расположением у них трех шарниров на вершинах треугольников ANB, ВЕС, CGD, ATD и возможностью закрепления на этих шатунах отдельных рабочих органов, а поворотные кривошипы 5 и 6 кинематически связаны с шатунами упомянутого параллелограмма через промежуточные двухшарнирные рычаги, для образования симметричного робота с двумя управляемыми степенями свободы (Wy=2).
На фиг. 3 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, в котором все шатуны 1, 2, 3 и 4 упомянутого параллелограмма выполнены в виде трехшарнирных соединительных рычагов с расположением у каждого из них всех трех шарниров на одной прямой линии, а поворотные кривошипы 5, 6, 7 и 8 кинематически связаны с шатунами упомянутого параллелограмма через промежуточные двухшарнирные рычаги 9, 10, 11 и 12, для образования симметричного робота с четырьмя управляемыми степенями свободы (Wy=4).
На фиг. 4 представлен вариант выполнения механизма плавающего шарнирно параллелограмма, в котором замкнутая кинематическая цепь выполнена в виде набора из трех параллелограммов A1B1C1D1, A2B2C2D2 и TEPQ, кинематически связанных между собой через шестигранное звено A1D1D2A2PE. Шатуны В1С1 и В2С2 выполнены с возможностью закрепления на них отдельных рабочих органов 13 и 14. Механизм снабжен поворотной платформой 15, выполненной с возможностью осуществления полного поворота, а параллелограмм TEPQ установлен на этой поворотной платформе, для образования симметричного двухрукого поворотного манипулятора с тремя управляемыми степенями свободы (Wy=3).
На фиг. 5 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, в котором противоположные вершины В и D четырехшатунного шарнирного параллелограмма ABCD кинематически связаны между собой через установленный по диагоналям BD параллелограмма подвижный гидроцилиндр 16 (в качестве приводной поступательной кинематической пары) и двойные цилиндрические шарниры В и D, один из двух поворотных кривошипов 5 и 6 (например, кривошип 5) снабжен приводной вращательной кинематической парой О1, а на шатуне CD закреплен рабочий орган в виде ковша 17 для образования привода ковша погрузчика с двумя управляемыми степенями свободы (Wy=2).
На фиг. 6 представлен вариант выполнения механизма плавающего шарнирного параллелограмма ABCD снабжен установленным внутри этого параллелограмма и соединенными с ним через поворотные кривошипы 1, 2, 3, 4 и двойные цилиндрические шарниры А, В, С, D, Е, N, Р, Q дополнительным шарнирным четырехзвенником ENPQ с установленным по его диагонали ЕР винтовым приводом 18, для образования однодвижного распорного устройства внутренней сейсмозащиты стен здания, выполняемого с одной управляемой степенью свободы (Wy=1) в контакте с внутренним контуром стен 19 этого здания.
На фиг. 7 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, в котором каждый из поворотных кривошипов О1А и О2С сблокирован с входящими в зацепление между собой зубчатыми колесами 20 и 21. установленными внутри четырехшатунного шарнирного параллелограмма ABCD. На каждом из шатунов 1, 2, 3 и 4 этого плавающего параллелограмма закреплены отдельные месильные емкости 22, 23, 24 и 25, для образования четырехемкостного вибросмесителя с приводом от одного двигателя, выполненного с одной управляемой степенью свободы (Wy=1).
На фиг. 8 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, в котором шарнирный параллелограмм выполнен в виде шарнирного ромба ABCD, противоположные вершины А и С которого кинематически связаны между собой через пневмоцилиндр 26 с подпружиненным поршнем (применяемым в качестве приводной поступательной кинематической пары), и через два двойных цилиндрических шарниры А и С.установленных на упомянутых противоположных вершинах ромба ABCD. Две смежные стороны АВ и ВС шарнирного ромба ABCD сблокированы с отдельными режущими рабочими органами 27 и 28, для образования самоустанавливающихся по контуру разрезаемого изделия летучих ножниц с одной управляемой степенью свободы (Wy=1).
На фиг. 9 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, который содержит два поворотных кривошипа 1 и 2, установленных внутри четырехшатунного шарнирного параллелограмма ABCD. Опорное основание О1О2 сблокировано с поворотной платформой 29, а шатун 2 этого параллелограмма сблокирован с пусковой площадкой 30 запуска беспилотных летательных аппаратов для образования мобильного пускового комплекса с двухподвижным вращательным приводом, выполненным с двумя управляемыми степенями свободы (Wy=2).
На фиг. 10 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, который снабжен установленными внутри четырехшатунного шарнирного параллелограмма ABCD и расположенными параллельно его шатунам 1, 2, 3 и 4 дополнительным ребрам жесткости в виде двухшарнирнымх распорных рычагов А1А2, А3А4, В1В2 и В3В4, для образования двухподвижного привода складывающейся плоской космической антенны, обладающего двумя управляемыми степенями свободы (Wy=2).
На фиг. 11 представлен вариант выполнения механизма плавающего шарнирного параллелограмма, в котором противоположно расположенные шатуны 1, 2, 3 и 4 четырехшатунного шарнирного параллелограмма ABCD кинематически связаны между собой посредством радиально изогнутых двухшарнирных соединительных рычагов NP и QE с осями углового поворота цилиндрических шарниров, пересекающимися между собой в одной точке М для образования складывающейся пространственной параболической антенны с двумя управляемыми степенями свободы при изменении геометрии его зеркала (Wy=2).
Работа представленного механизма плавающего шарнирного параллелограмма заключается в следующем. При вращении (одновременном или раздельном) поворотных кривошипов (в указанных на фиг. 1-11 направлениях) обеспечивается широкий диапазон возможных движений в рабочем пространстве всех четырех шатунов параллелограмма с установленными на них разнообразными рабочими органами.
Достигаемый положительный эффект заключается в упрощении конструкции, исключении вредных избыточных связей и мертвых положений звеньев параллелограмма, расширении рабочего пространства (за счет увеличения числа Wy управляемых степеней свободы) и функциональности параллелограммного механизма, что расширяет области его эффективного применения в разных областях машиностроения и техники (примеры которых представлены на фиг. 2 - фиг. 11), а также повышает точность и быстродействие системы наведения пусковых установок при совместном вращении обоих поворотных кривошипов на фиг. 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
Изобретение относится к машиностроению, в частности к шарнирно-рычажным приводам. Механизм плавающего шарнирного параллелограмма содержит опорное основание и замкнутую кинематическую цепь. Цепь включает четыре шатуна, кинематически взаимосвязанные через цилиндрические шарниры, и поворотные кривошипы. Кривошипы собраны между собой в многосторонние изменяемые замкнутые контуры с установкой в них приводных вращательных, поступательных или винтовых кинематических пар. Пары образуют четырехшатунный шарнирный параллелограмм. Достигается упрощение конструкции. 9 з.п. ф-лы, 11 ил.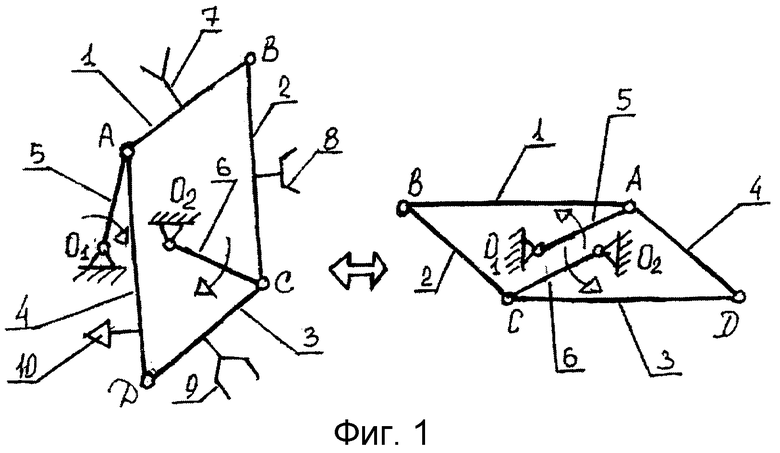
1. Механизм плавающего шарнирного параллелограмма, содержащий опорное основанием и замкнутую кинематическую цепь рычажных звеньев, включающую четырехзвенный шарнирный параллелограмм и поворотные кривошипы привода рабочего органа, отличающийся тем, что шарнирный параллелограмм составлен из четырех многошарнирных шатунов, кинематически связанных между собой и с опорным основанием через цилиндрические шарниры с вращательными кинематическими парами, и поворотных кривошипов, собираемых между собой в многосторонние изменяемые замкнутые контуры кинематической цепи с установкой в упомянутые контуры приводных вращательных, поступательных или винтовых кинематических пар для образования четырехшатунного шарнирного параллелограмма с различным числом Wy управляемых степеней свободы.
2. Механизм по п. 1, отличающийся тем, что каждый из шатунов четырехшатунного шарнирного параллелограмма выполнен в виде многошарнирного соединительного рычага, например двухшарнирного или трехшарнирного с расположением у последнего трех шарниров на одной прямой линии или на вершинах треугольника, все шатуны упомянутого параллелограмма выполнены с возможностью закрепления на них отдельных рабочих органов, а поворотные кривошипы кинематически связаны с шатунами четырехшатунной шарнирно параллелограмма через промежуточные двухшарнирные соединительные рычаги для образования симметричного робота с четырьмя управляемыми степенями свободы, Wy=4.
3. Механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде набора, например, из трех шарнирных параллелограммов, кинематчиески связанных между собой через многошарнирное, например, шестишарнирное звено, шатуны двух из упомянутых параллелограммов выполнены с возможностью закрепления на них отдельных рабочих органов, механизм снабжен поворотной платформой, выполненной с возможностью осуществления полного поворота, а третий из упомянутых параллелограммов установлен на упомянутую поворотную платформу для образования симметричного двухрукого поворотного манипулятора с тремя управляемыми степенями свободы, Wy=3.
4. Механизм по п. 1, отличающийся тем, что противоположные вершины четырехшатунного шарнирного параллелограмма кинематически связаны между собой через установленный по диагонали упомянутого параллелограмма подвижный гидроцилиндр и двойные цилиндрические шарниры для образования двухподвижного привода ковша погрузчика с двумя управляемыми степенями свободы, Wy=2.
5. Механизм по п. 1, отличающийся тем, что четырехшатунный шарнирный параллелограмм снабжен установленным внутри него и соединенным с ним через поворотные кривошипы и двойные цилиндрические шарниры дополнительным шарнирным четырехзвенником с установленным по его диагонали винтовым приводом для образования одноподвижного распорного устройства внутренней сейсмозащиты стен здания за счет выполнения упомянутого устройства с одной управляемой степенью свободы, Wy=1.
6. Механизм по п. 1, отличающийся тем, что каждый из поворотных кривошипов сблокирован с входящими в зацепление между собой зубчатыми колесами, установленными внутри четырехшатунного шарнирного параллелограмма, а каждый из шатунов упомянутого параллелограмма выполнен с возможностью закрепления на нем отдельной месильной емкости для образования четырехемкостного вибросмесителя с приводом от одного двигателя, выполненного с одной управляемой степенью свободы, Wy=1.
7. Механизм по п. 1, отличающийся тем, что четырехшатунный шарнирный параллелограмм выполнен в виде шарнирного ромба, противоположные вершины которого кинематически связаны между собой через подвижный пневмоцилиндр в качестве приводной поступательной пары и через два двойных цилиндрических шарнира, установленных на упомянутых вершинах ромба, а две смежные стороны этого ромба сблокированы с отдельными режущими органами для образования самоустанавливающихся летучих ножниц с одной управляемой степенью свободы, Wy=1.
8. Механизм по п. 1, отличающийся тем, что он содержит два поворотных кривошипа, установленных внутри четырехшатунного шарнирного параллелограмма, опорное основание которого сблокировано с поворотной платформой, а один из шатунов упомянутого параллелограмма сблокирован с пусковой площадкой запуска беспилотных летательных аппаратов для образования мобильного пускового комплекса с двухподвижным вращательным приводом, выполненным с двумя управляемыми степенями свободы, Wy=2.
9. Механизм по п. 1, отличающийся тем, что он снабжен установленными внутри четырехшатунного шарнирного параллелограмма и расположенными параллельно его шатунам дополнительными ребрами жесткости в виде двухшарнирных распорных рычагов, а поворотные кривошипы выполнены одинаковой длины и расположены параллельно между собой для образования двухподвижного привода складывающейся антенны рефлектора, обладающего двумя управляемыми степенями свободы, Wy=2.
10. Механизм по п. 1, отличающийся тем, что противоположно расположенные шатуны четырехшатунного шарнирного параллелограмма связаны между собой посредством радиально изогнутых двухшарнирных соединительных рычагов с осями углового поворота, пересекающимися между собой в одной точке, для образования пространственного рефлектора космической антенны с двумя управляемыми степенями свободы при изменении геометрии его зеркала, Wy=2.
| Поточно-механизированная линия для производства сварочных электродов | 1982 |
|
SU1061963A1 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ВОЛОКОННО-ОПТИЧЕСКИХ ШТЫРЕВЫХ КОНТАКТОВ | 1999 |
|
RU2210796C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТЕРМОАКУСТИЧЕСКОГО ИЗЛУЧАТЕЛЯ НА ОСНОВЕ ГРАФЕНА | 2019 |
|
RU2724227C1 |
| АДГЕЗИОННАЯ НАКЛАДКА | 2009 |
|
RU2489140C2 |
| Устройство для обеспыливания клубней картофеля | 1985 |
|
SU1344276A1 |
| МЕХАНИЧЕСКАЯ ИГРУШКА | 1992 |
|
RU2062630C1 |
| ПОДВИЖНАЯ МЕХАНИЧЕСКАЯ СИСТЕМА СЕЙСМОЗАЩИТЫ ЗДАНИЯ | 2020 |
|
RU2742677C1 |

