Изобретение относится к механическим подвижным соединительным устройствам для преобразования движения в одной или параллельных плоскостях и может найти применение в приводах машин для разных областей машиностроения, например для передачи от одного двигателя вращения в многозвенных шарнирных механизмах одновременно на несколько рабочих органов с разными или с одинаковыми по направлению и величине линейными или угловыми скоростями (например, в приводе электровоза с несколькими тяговыми колесами или в трансмиссии многоколесных бронетранспортеров и самоходных роботов-вездеходов, а также в многошпиндельных машинах-автоматах.
Известен шарнир Гука, содержащий подвижное устройство муфты для соединения вращающихся под углом валов, выполненное в виде плавающей крестовины с перпендикулярно расположенными и жестко скрепленными между собой осями, образующими вращательные кинематические пары с ведущим и ведомым валами, вращающимися в одном направлении и с одинаковыми скоростями (Решетов Л.Н. «Конструирование рациональных механизмов». - М.: Изд-во «Машиностроение», 1967, с.103, схема на рис.58) - аналог.
Недостатками известного шарнира Гука являются (см. Решетов Л.Н. «Конструирование рациональных механизмов». - М.: Изд-во «Машиностроение», 1967, с.103):
1. Требование точного пересечения в одной точке перпендикулярных осей плавающей крестовины и осей вращения ведущего и ведомого валов удорожает изготовление и снижает надежность эксплуатации (нарушение этого требования приводит к повышению трения и износа подвижных узлов соединительного устройства и появлению дополнительных сил, приводящих к его поломке).
2. Ограниченные функциональные и эксплуатационные возможности указанного устройства позволяют передать движение только на один рабочий орган, вращающийся только в том же направлении и только с той же, что и двигатель, угловой скоростью. Из-за этих ограничений, например, в приводе электровоза для передачи вращения от одного двигателя сразу на три оси тяговых колес нужно шарнир Гука дополнять комплектом из 8 зубчатых колес с разным числом зубьев (схема такого привода представлена в книге: Решетов Л.Н. «Самоустанавливающиеся механизмы» (справочник) - М.: Машиностроение, 1979, с.211, рис.4.38,6).
3. Сложность подвижных узлов конструкции и их сборки (из-за необходимости применять большой комплект разных зубчатых колес в приводе с несколькими рабочими органами) и соответственно большие габариты механической передачи.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является применяемый в передачах для преобразования движения шарнир Кардана, содержащий многократное соединительное устройство поворотных вокруг общей оси звеньев, выполненное в виде двух плавающих крестовин из перпендикулярно закрепленных между собой осей с попарно установленными на концах этих осей вилками для кинематической связи с ведущим, промежуточным и ведомым валами (Решетов Л.Н. «Конструирование рациональных механизмов». - М.: Машиностроение, 1967, с.106, схема на рис.60; авт. свид. №250974 «Передаточный механизм с шарниром Кардана». - Бюл. изобр. №27, 1969 г.) - прототип.
Недостатками указанного шарнира Кардана являются:
1. Шарнир Кардана позволяет передавать вращение только между двумя подвижными валами, вращающимися в одном направлении и с одинаковой угловой скоростью, что характеризует его ограниченные функциональные и эксплуатационные возможности преобразования движения в передачах с несколькими рабочими органами.
2. Сложность конструкции и большие габариты даже в передачах вращения на один рабочий орган из-за применения в шарнире сложных поворотных звеньев (например, промежуточный вал и обе плавающие крестовины), содержащих три и более кинематических пар с большой трудоемкостью их сборки и разборки.
3. Применение шарнира Кардана в передачах для преобразования движения от одного двигателя на несколько рабочих органов приводит к значительному дополнительному усложнению конструкции и увеличению габаритов и веса всей силовой передачи.
Например, в силовой передаче мощных электровозов с приводом от одного двигателя всего лишь на две оси (на 2 тяговых колеса) необходимо шарнир Кардана обязательно дополнить комплектом из 6 зубчатых колес со специально рассчитанными разными числами зубьев для их сложного зацепления между собой (схема такого зубчатого привода с шарниром Кардана представлена в книге: Решетов Л.Н. «Самоустанавливающиеся механизмы» (справочник) - М.: Машиностроение, 1979, с.210, рис.4.37, в).
4. Требуется высокая точность изготовления и сборки, так как шарнир Кардана является работоспособным только при выполнении всех 6 условий его точного изготовления и сборки:
1) Оси ведущего и промежуточного валов, а также оси промежуточного и ведомого валов должны пересекаться между собой.
2) Точка пересечения указанных осей должна находиться в плоскости каждой из плавающих крестовин соединительного устройства.
3) Оси противоположных вилок каждой из плавающих крестовин должны лежать на одной прямой,
4) Оси накрест расположенных вилок каждой из плавающих крестовин должны пересекаться в плоскости данной крестовины.
5) Точка пересечения перпендикулярных осей каждой из плавающих крестовин должна обязательно совпадать соответственно с обеими точками, образованными пересечением ведущего и промежуточного валов, а также пересечением ведомого и промежуточного валов.
6) Все 4 вращательных кинематических пары на обеих плавающих крестовинах шарнира Кардана должны располагаться под точным углом 90 градусов друг к другу, а также располагаться точно на одинаковом расстоянии по разные стороны от центральной оси вращения соединительного устройства.
Нарушение любого из этих 6 обязательных требований к точности изготовления и сборки (а тем более нескольких из этих требований) приводит к появлению дополнительных нагружающих сил, повышенному трению, износу и поломке всего соединительного устройства шарнира Кардана.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции шарнира передачи для преобразования движения и снижении за счет этого габаритов и веса механической передачи, а также расширении ее функциональных и эксплуатационных возможностей преобразования движений в механических приводах машин без применения сложных зубчатых колес, в снижении трудоемкости изготовления и сборки подвижных узлов шарнира, а также упрощении самых сложных соединяемых через VIP-шарниры поворотных рычажных звеньев преобразующих механизмов за счет их выполнения предельно простыми (в виде рычагов только с двумя отверстиями под оси шарниров).
Получение технического результата достигается за счет того, что VIP-шарнир передачи для преобразования движения содержит многократное соединительное устройство поворотных вокруг общей оси звеньев, которое выполнено в виде набора соосно расположенных в одной плоскости цилиндров разного диаметра при размещении одних внутри других, смонтированных с возможностью углового поворота относительно друг друга в одной и той же плоскости и присоединяемых к разным поворотным рычажным звеньям собираемой механической системы преобразования движений, где в пределах каждого набора цилиндров установленные один внутри другого цилиндры разного диаметра выполнены разной длины и смонтированы между собой таким образом, что наружный цилиндр имеет наименьшую длину и наибольший диаметр, а внутренний цилиндр имеет наибольшую длину и наименьший диаметр.
В пределах общей сборки многозвенной механической системы преобразования движений установленные один внутри другого цилиндры разных многократных соединительных устройств могут быть последовательно сблокированы с шатунами и ведомыми кривошипами вокруг разных подвижных осей для образования шарнирного механизма параллельных кривошипов, преобразующего вращение одного ведущего кривошипа в синхронное вращение с той же угловой скоростью нескольких ведомых кривошипов, установленных в одной или параллельных плоскостях, например, для привода от одного двигателя сразу нескольких тяговых колес электровоза без применения для этого сложных комплектов зубчатых колес.
В другом варианте общей сборки многозвенной механической системы преобразования движений установленные один внутри другого цилиндры одного многократного соединительного устройства могут быть сблокированы с двумя шатунами вокруг их общей подвижной оси, а установленные один внутри другого цилиндры другого многократного соединительного устройства могут быть сблокированы с двумя другими поворотными вокруг общей неподвижной оси рычажными звеньями для образования шарнирного механизма качающегося параллелограмма, преобразующего вращение ведущего звена в разнонаправленное вращение двух соосно установленных ведомых звеньев (например, привода обрезных встречно поворотных ножниц) или в однонаправленное вращение с разными угловыми скоростями двух смещенных между собой ведомых звеньев.
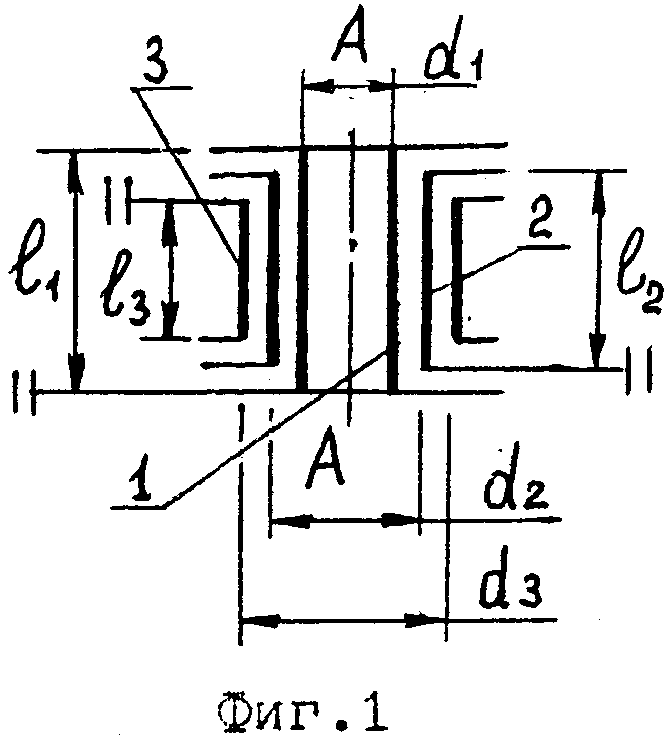
Сущность изобретения поясняется чертежами, где на фиг.1, фиг.2 и фиг.3 представлены различные варианты выполнения многократного соединительного устройства VIP-шарнира передачи для преобразования движения, выполненного в виде различных наборов соосно расположенных в одной плоскости цилиндров разного диаметра при размещении одних внутри других, смонтированных с возможностью углового поворота относительно друг друга в одной и той же плоскости и присоединяемых к разным поворотным вокруг общей оси А-А рычажным звеньям собираемой механической системы преобразования движений, варианты которой представлены на фиг.4, фиг.5, фиг.6 и фиг.7. В пределах каждого набора цилиндров установленные один внутри другого цилиндры разного диаметра выполнены разной длины и смонтированы между собой таким образом, что наружный цилиндр имеет наименьшую длину и наибольший диаметр, а внутренний цилиндр имеет наибольшую длину и наименьший диаметр.
На фиг.1 представлено устройство трехзвенного двухкратного VIP-шарнира, содержащего набор из трех соосно расположенных в одной плоскости и установленных один внутри другого внутреннего цилиндра 1 (длиной l1 и диаметром d1), промежуточного цилиндра 2 (длиной l2 и диаметром d2) и наружного цилиндра 3 (длиной l3 и диаметром d3), у которых выполняется соотношение размеров: l3<l2<l1 и d3>d2>d1. Внутренний, промежуточный и наружный цилиндры трехзвенного двухкратного соединительного устройства на фиг.1 смонтированы с возможностью углового поворота относительно друг друга, в одной и той же плоскости (вокруг общей оси А-А) и присоединяются к разным поворотным рычажным звеньям собираемой механической системы преобразования движений в заданной плоскости.
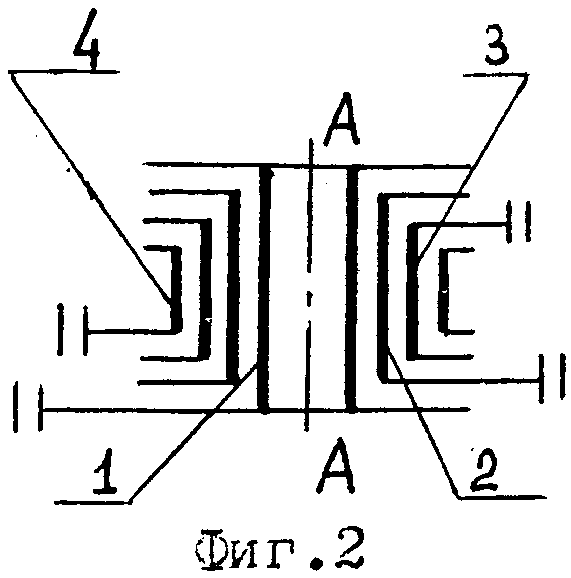
На фиг.2 представлено аналогичное устройство четырехзвенного трехкратного VIP-шарнира, содержащего набор из четырех соосно расположенных в одной плоскости и установленных один внутри другого цилиндров разного диаметра 1, 2, 3 и 4, предназначенных для подвижного вращательного соединения между собой (вокруг общей оси А-А) четырех разных поворотных рычажных звеньев собираемой системы преобразования движений в заданной плоскости.
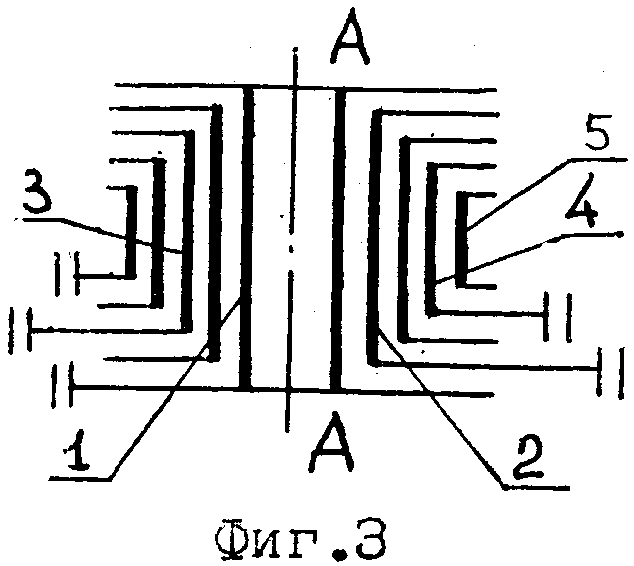
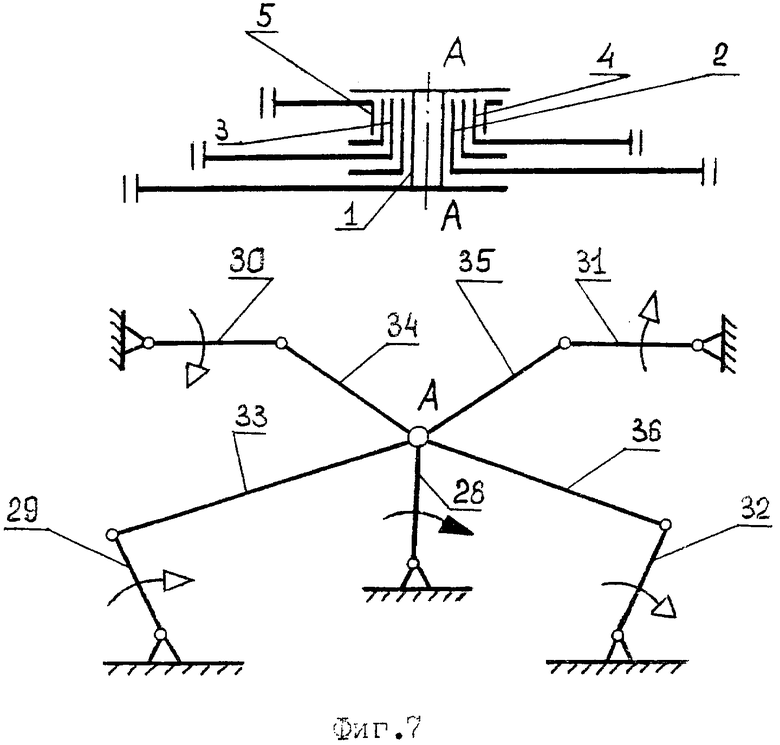
На фиг.3 представлено устройство пятизвенного четырехкратного VIP-шарнира, содержащего набор из пяти соосно расположенных в одной плоскости и установленных один внутри другого цилиндров разного диаметра 1, 2, 3, 4 и 5, предназначенных для подвижного вращательного соединения между собой (вокруг общей оси А-А) пяти разных поворотных рычажных звеньев собираемой механической системы преобразования движений в заданной плоскости.
На фиг.4 представлена (в двух проекциях - профильной и фасной) кинематическая схема собираемой на основе трех двухкратных VIP-шарниров (вокруг подвижных осей A, B и C) механической системы преобразования движений, где установленные один внутри другого цилиндры двухкратных VIP-шарниров последовательно сблокированы на осях A, B и C с шатунами 6, 7, 8, 9 и ведомыми кривошипами 10, 11, 12, 13 для образования шарнирного механизма параллельных кривошипов, преобразующего вращение ведущего кривошипа 14 в синхронное вращение с той же угловой скоростью ведомых кривошипов 10, 11, 12 и 13, установленных на основании 15 в одной или параллельных плоскостях (например, в качестве вращательного привода от одного двигателя сразу на 4 тяговых колеса транспорта). Согласно фиг.4 установка в привод трех двухкратных VIP-шарниров (с соответствующими осями A, B, C) позволяет предельно упростить конструкцию, изготовление и сборку самых сложных поворотных рычажных звеньев привода 6, 7, 8, 9, 10, 11 и 12 за счет выполнения их в виде простых рычагов всего с двумя отверстиями по концам под оси шарниров.
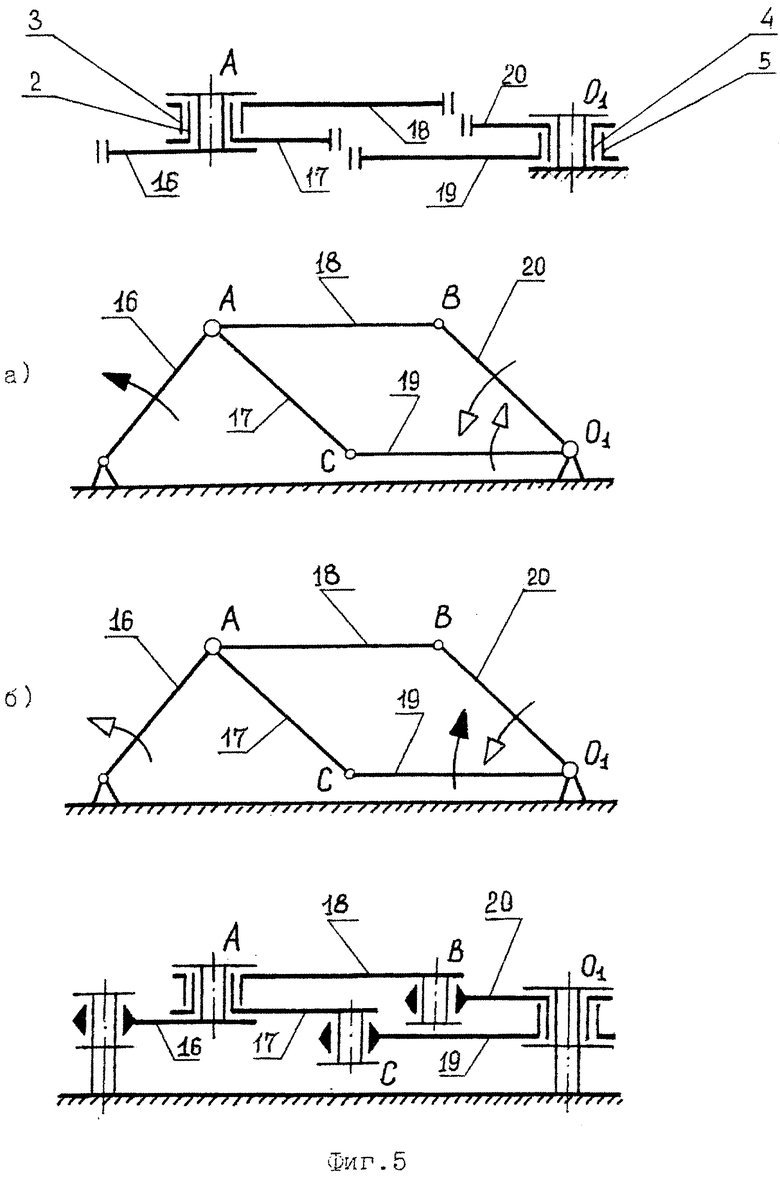
На фиг.5 представлена (в двух проекциях - профильной и фасной) кинематическая схема собираемой на основе двух двухкратных VIP-шарниров (вокруг осей A и O1) механической системы преобразования движений, в которой установленные один внутри другого цилиндры 2 и 3 одного многократного соединительного устройства сблокированы с двумя шатунами AB и AC (вокруг их общей подвижной оси A), а установленные один внутри другого цилиндры 4 и 5 другого многократного соединительного устройства сблокированы вокруг неподвижной оси O1 с двумя другими поворотными (вокруг общей неподвижной оси O1) рычажными звеньями CO1 и BO1 для образования шарнирного механизма качающегося параллелограмма, преобразующего в схеме на фиг.5(а) вращение ведущего звена 16 в разнонаправленное вращение двух соосно установленных ведомых звеньев 19 и 20 (например, в качестве привода обрезных ножниц с обеспечением встречного вращения двух рабочих органов CO1 и BO1 без применения зубчатых колес). На фиг.5(б) представлен вариант выполнения на основе тех же двухкратных VIP-шарниров схемы шарнирного механизма качающегося параллелограмма с другим ведущим звеном 19, в котором оси поворота других ведомых звеньев 16 и 20 смещены между собой, а ось вращения ведомого звена 20 совмещена с осью вращения ведущего звена, что обеспечивает однонаправленное вращение ведомых звеньев 16 и 20 с различными угловыми скоростями (также без применения зубчатых колес).
На фиг.6 представлена кинематическая схема собираемой на основе четырехзвенного трехкратного VIP-шарнира (с черырьмя соосными цилиндрами 1, 2, 3 и 4 на общей подвижной оси A) механической системы преобразования движений в виде рычажного механизма, преобразующего заданное вращение ведущего звена-кривошипа 21 в требуемые различные законы движения трех рабочих органов в виде разнонаправленных угловых колебаний рычагов 22(AO2) и 23(CO3), а также поступательного движения ползуна 24 с заданной линейной скоростью (закон изменения которой можно регулировать за счет переменной внутрицикловой скорости точки A шатуна 22 в отличие от постоянной скорости данной точки A в обычном кривошипно-ползунном механизме).
На фиг.7 представлена кинематическая схема собираемой на основе пятизвенного четырехкратного VIP-шарнира (с пятью соосными цилиндрами 1, 2, 3, 4 и 5 на общей подвижной оси A) механической системы преобразования движений в виде шарнирного механизма, преобразующего через шатуны 33, 34, 35, 36 заданное вращение ведущего звена-кривошипа 28 в требуемые законы углового поворота одновременно четырех рабочих органов 29, 30, 31, 32 (без применения зубчатых колес для их вращения в противоположном направлении и с различными угловыми скоростями).
Достигаемый в предлагаемом VIP-шарнире положительный эффект заключается в следующем:
1. Упрощается конструкция шарнира соединительного устройства и уменьшаются его габариты в связи с простотой его изготовления, смазки, сборки и разборки наборов установленных один внутри другого цилиндров для их присоединения к поворотным рычажным звеньям механической системы преобразования движения.
2. В самой механической системе преобразования движения и передачи мощности через многократные VIP-шарниры упрощается конструкция самых сложных поворотных рычажных звеньев преобразующих механизмов за счет их выполнения предельно простыми (в виде простых в изготовлении и сборке рычагов только с двумя отверстиями под оси шарниров).
3. Снижаются потери на трение и повышается надежность работы шарнира за счет применения всех вращательных кинематических пар для передачи больших усилий на разные рабочие органы.
4. Снижается трудоемкость изготовления шарнира за счет снижения требуемой точности его изготовления и сборки.
5. В отличие от известных шарниров Гука и Кардана конструкция VIP-шарнира позволяет соединять и передавать движение на три и более поворотных рычажных звеньев в механических системах преобразования движений и применить его, например, в приводе транспорта с несколькими синхронно вращающимися тяговыми колесами или реализовать в приводах машин с несколькими рабочими органами их противоположное вращение без применения комплекта сложных зубчатых колес с разным числом зубьев, что приводит к упрощению конструкции всей передачи преобразования движения и снижению ее общих габаритов и веса.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| МНОГОКРАТНЫЙ ЦИЛИНДРИЧЕСКИЙ ШАРНИР | 2021 |
|
RU2760497C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| МНОГОПОРШНЕВОЙ РЫЧАЖНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751012C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| СТЕРЖНЕВАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2760496C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |

Изобретение относится к области машиностроения и может найти применение в качестве многократного соединительного устройства. Многократный шарнир передачи содержит многократное соединительное устройство поворотных вокруг общей оси звеньев. При этом многократное соединительное устройство выполнено в виде набора расположенных в одной плоскости соосных цилиндров разного диаметра при размещении одних внутри других, где в пределах каждого набора цилиндров цилиндры разного диаметра выполнены разной длины и смонтированы между собой таким образом, что наружный цилиндр имеет наименьшую длину и наибольший диаметр, а внутренний цилиндр имеет наибольшую длину и наименьший диаметр. Достигается упрощение конструкции. 2 з.п. ф-лы, 7 ил.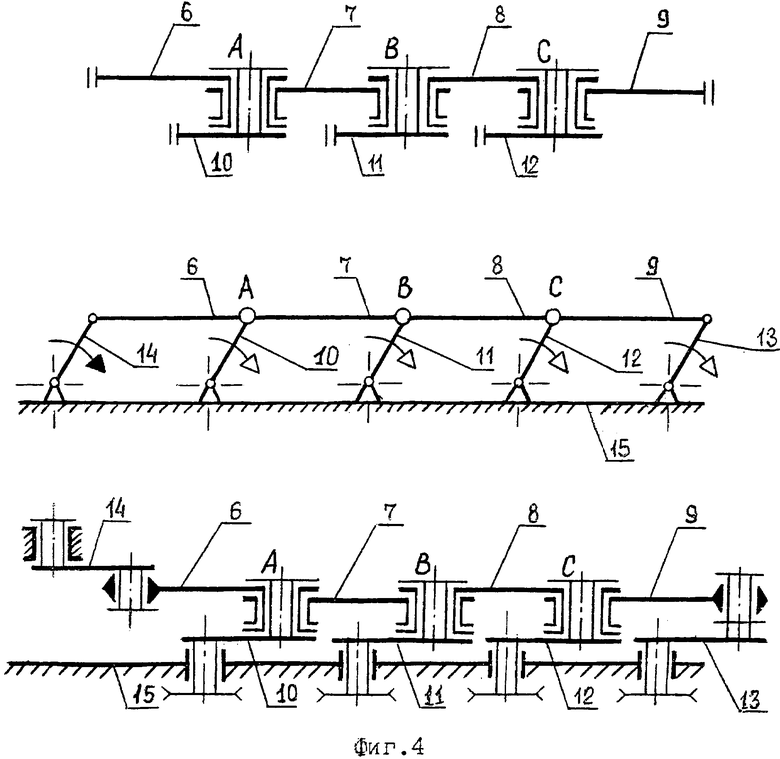
1. Многократный шарнир передачи, содержащий многократное соединительное устройство поворотных вокруг общей оси звеньев, отличающийся тем, что многократное соединительное устройство выполнено в виде набора расположенных в одной плоскости соосных цилиндров разного диаметра при размещении одних внутри других, где в пределах каждого набора цилиндров установленные один внутри другого цилиндры разного диаметра выполнены разной длины и смонтированы между собой таким образом, что наружный цилиндр имеет наименьшую длину и наибольший диаметр, а внутренний цилиндр имеет наибольшую длину и наименьший диаметр.
2. Многократный шарнир передачи по п.1, отличающийся тем, что в пределах общей сборки многозвенной механической системы преобразования движений установленные один внутри другого цилиндры разных многократных соединительных устройств последовательно сблокированы с шатунами и ведомыми кривошипами вокруг разных подвижных осей для образования шарнирного механизма параллельных кривошипов, преобразующего вращение одного ведущего кривошипа в синхронное вращение с той же угловой скоростью нескольких ведомых кривошипов, установленных в одной или в параллельных плоскостях.
3. Многократный шарнир передачи по п.1, отличающийся тем, что в пределах общей сборки многозвенной механической системы преобразования движений установленные один внутри другого цилиндры одного многократного соединительного устройства сблокированы с двумя шатунами вокруг их общей подвижной оси, а установленные один внутри другого цилиндры другого многократного соединительного устройства сблокированы с двумя другими поворотными вокруг общей неподвижной оси рычажными звеньями для образования шарнирного механизма качающегося параллелограмма, преобразующего вращение ведущего звена во вращение двух ведомых звеньев, установленных соосно между собой при их смещении относительно оси вращения ведущего звена или со смещением между собой при совмещении оси вращения одного из ведомых звеньев с осью вращения ведущего звена.
| Универсальный шарнир | 1984 |
|
SU1278510A1 |
| Аппарат для отрезания, гашения и учета талонов контрольных карточек | 1932 |
|
SU32224A1 |
| Механизм для вертикального перемещения | 1982 |
|
SU1100449A1 |
| US 4712814 A, 15.12.1987 | |||

