Изобретение относится к авиации, а именно к конструкции автомата перекоса несущего винта вертолета, но возможно его также использовать для самолетов пропеллерного типа.
Известна конструкция автомата перекоса, используемая на вертолетах, содержащая вращающееся кольцо с тягами поворота лопастей, соединенное шлиц-шарниром с приводом вала от редуктора, не вращающееся кольцо с шарнирно присоединенному к нему тягами продольного и поперечного управления, связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку.соединенную двумя сферическими подшипниками с не вращающимся кольцом.
Наиболее близким аналогом изобретение является патент №2661886, B64С 27/605, который содержит автомат перекоса несущего винта, содержащий вращающееся кольцо с тягами поворота лопастей, соединенное щлиц-шарниром с приводом вала от редуктора, не вращающееся кольцо с шарнирно присоединенному к нему тягами продольного и поперечного управления, связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с несущим кольцом.
Основными недостатками в работе автомата перекоса вертолета является то, что недостаточные его летно-технические характеристики при полете, а именно сравнительно невысокие скоростные показатели полета, недостаточная маневренность, грузоподъемность.
Целью изобретения является устранение выше перечисленных недостатков, а именно существенное повышение летные характеристики вертолета, в частности повышение скоростного режима, управляемости, грузоподъемности.
Для достижения этой цели предлагается автомат перекоса вертолета, в котором лопасти совершая круговое -азимутное вращение не только меняют свой угол атаки при каждом положении, но и производят колебания в вертикальной и горизонтальных плоскостях с поворотами в сторону вращения, достигаемое путем установки специального подшипника, в котором сепаратор, выполненный виде чашки с прорезями, куда вставлены шарики, ограниченные обоймами, внутренней, свободно вращающейся, а наружная с бандажом для управления лопастями с помощью поводков, причем дорожка-желобок ее выполнена по растянутой синусоиде половина ее прямой участок, а сама чашка установлена на подвижной втулке на сферическом подшипнике с возможностью поворота вперед назад и на бок и свободно перемещающаяся.управляя общим шагом винта.
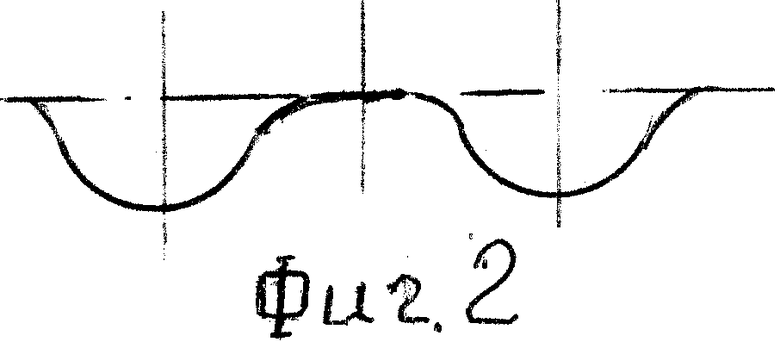
На Фиг.1 изображен общий вид автомата перекоса вертолета.
На Фиг.2 показана дорожка- желобок, по которой наружная обойма подшипника перемещаются при вращении.
Автомат перекоса вертолета Фиг.1 состоит из несущего винта 1 с узлами установки лопастей 2,подвесных рычагов 3.соединенных с лопастями 2 телескопическими тягами 4 с упругими элементами 5. Основным узлом автомата перекоса вертолета является подшипник, у которого сепаратор 6 выполнен виде чашки с пазами, куда вставляются шарики 7,внутренняя обойма 8 с прямой дорожкой-желобок для шариков 7, наружная обойма 9 имеет дорожку-желобок, выполненную по растянутой синусоиде, у которой половина периода -прямая линия Фиг.2, причем на этой линии уже выставлены рабочие углы лопастей 2 при их вращении. Количество выступов на дорожке -желобок должно быть равным или кратным количеству шариков 7. Обойма 9 помещена в бандаж 10 с ушками для привода штоков 11 с поводками 12 лопастей 2 и подвесных рычагов 3. Привод наружной обоймы 9 с бандажом 10 осуществляется поводком 13 от несущего винта 1. Все сопряжения имеют сферические подшипники. Кроме того, сепаратор 6 установлен на подвижной втулке 14 и сопряжен с нею сферическим подшипником 15,с возможностью за счет сережки 16 наклоняться на бок и за счет сережки 17 вперед, назад или одновременно перемещаться по втулке направляющей 18 общего шага, в которой внутри проходит вал несущего винта 1.Чтобы не выпадали шарики 7 из пазов сепаратора 6 и были закреплены обоймы 8 и 9 установлена крышка 19.
Автомат перекоса вертолета работает следующим образом. Во-первых, выполняются все требования для полета обычного вертолета, но для получения более высоких летно-технических качеств полета применен более совершенный механизм автомата перекоса, который работает следующим образом. При приложении крутящего момента к несущему винту 1,за счет поводка 13 начинает вращаться наружная обойма подшипника 9, вместе с бандажом 10.приводя в движение штоки 11 с поводками 12. Фиг.1. Так как шарики 7 находятся в пазах и не могут перемещаться, то наружная обойма 9 вместе с бандажом 10 будут совершать движение по дорожке-желобу, имеющей половину периода растянутой синусоиды и половина периода прямой линии. Фиг.2, т.е. совершать колебательное движение. Обойма 8 имеет свободное вращение. При вращении наружной обоймы 9 вместе с бандажом 10 происходит копирование шариками 7 дорожки-желобка, при котором они совершают колебательное движение вместе со штоками 11 и поводками 12 и подвесными рычагами З.как было сказано выше, поворачивая лопасти 2 на заданные углы. Рассмотрим работу автомата перекоса в замедленном виде в режиме полета. При этом работает сережка 17 вперед- назад. Сепаратор 6 в сферическом подшипнике 15 может поворачиваться на угол, благодаря этому при вращении несущего винта 1 штоки 11 с поводками 12 перемещаются вверх-вниз на различные расстояния и поворачивают лопасти 2 на различный в каждом азимутальном положении угол. т.е. угол установки лопастей 2. В динамике, циклический шаг выглядит так, В некотором азимутном положении угол установки лопастей 2 минимальный, затем по мере ее вращения этот угол возрастает, достигая через полоборота несущего винта 1 максимальное значение. В течение следующей половины оборота несущего винта 1 угол уменьшается до исходного минимального значения. В итоге значение (сила) тяги становится неодинаковой в противоположных азимутах плоскости вращения несущего винта 1, благодаря чему изменяется положение в пространстве плоскости вращения несущего винта 1, что в свою очередь заставляет вертолет двигаться в горизонтальной плоскости. Аналогичным образом изменяется угол установки лопастей 2 при отклонении поперечной сережки 16 на угол. Так происходит управление циклическим шагом несущего винта 1 в течение оборота. Теперь рассмотрим работу несущего винта в целом. Начинаем работу несущего винта 1 с момента, когда у наружной обоймы 9 дорожка-желобок переходит из горизонтального положения Фиг.2 в синусоидальный. Начинается подъем наружной обоймы 9 с бандажом 10 вверх с перемещением штоков 11, поводков 12 и подвесных рычагов 3. Поводки 12 будут поворачивать лопасти 2 на определенный угол от установленного, а штоки 11 поднимать подвесной рычаг 3 на определенное расстояние вместе с лопастями 2, с помощью телескопических тяг 4. Так как вся система вращается, то следующим положением наружной обоймы 9 и бандажом 10 будет опускание до горизонтальной линии дорожки наружной обоймы 9. За этот период вращения несущего винта 1,лопасти 2 совершают сложную траекторию движения с изменением углов. Сначала углы лопастей 2 увеличиваются с одновременным их поворот вокруг осей вращения в сторону вращения, следующим моментом будет уменьшение углов до расчетных, с продолжением поворота. Мы имеем захват лопастями 2 определенной порции воздушной массы и отбросом ее, тем самым, создавая дополнительную тягу. Если это теперь воспроизвести на более высоких оборотах несущего винта 1, то это будет выглядеть следующим образом. Лопасти 2 за счет штоков 11, поводков 12 и подвесных рычагов 3 поднимаются и увеличивают углы, с одновременным поворотом вокруг оси вращения и далее происходит уменьшение углов до расчетных величин и с продолжением поворотов. Получаем, взмах вверх-вниз - с поворотом, и образование вакуума над лопастями 2, что и создает дополнительную силу тяги вертолета. Другими словами создается разряжение воздуха впереди лопастей, создавая поступательное движение вертолета, в дополнении существующей силе тяги при полете. Для того чтобы не было резких рывков при подъемах лопастей 2 и их опускания, телескопические тяги 4 имеют упругие элементы 5. Подвижная втулка 14 автомата перекоса может двигаться вверх или вниз по направляющей 18, при этом все штоки 11 и поводки 12 перемещаются на одинаковые расстояния и поворачивают с помощью их все лопасти на заданные углы. Управление общим шагом лопастей несущего винта сопровождается синхронным изменением мощности двигателя. И наконец, сепаратор 6, установленный на подвижной втулке 14 на сферическом подшипнике 15 с возможностью поворота вперед назад в бок и двигаться вдоль втулки 18, при работе несущего винта 1 должен быть постоянно защемлен от проворачивания.
Применение предложенного автомата перекоса для вертолета позволит значительно повысить летные и технические характеристики вертолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2021 |
|
RU2754784C1 |
| АВТОМАТ ПЕРЕКОСА | 2009 |
|
RU2402457C1 |
| ВЕРТОЛЁТ | 2018 |
|
RU2682998C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| Колонка соосных несущих винтов | 1988 |
|
SU1824346A1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
Изобретение относится к области авиации, в частности к конструкциям автоматов перекоса вертолетов. Автомат перекоса вертолета содержит вращающееся кольцо с тягами поворота лопастей, сережки поперечного и продольного управления, управление общим шагом несущего винта. Подшипник автомата перекоса содержит сепаратор, выполненный в виде чашки с прорезями, куда вставлены шарики, ограниченные обоймами. Внутренняя обойма свободно вращается. Половина дорожки-желобка наружной обоймы выполнена в виде растянутой синусоиды, а другая половина в виде прямого участка. Чашка установлена на сферическом подшипнике с возможностью поворота вперед-назад и вбок, перемещения вдоль вала для управления общим шагом и защемлена от проворачивания. Лопасти, совершая круговое вращение, не только изменяют свой угол атаки при каждом положении, но и производят колебания в вертикальной и горизонтальных плоскостях с поворотами в сторону вращения. Достигается повышение скорости и управляемости вертолета. 2 ил.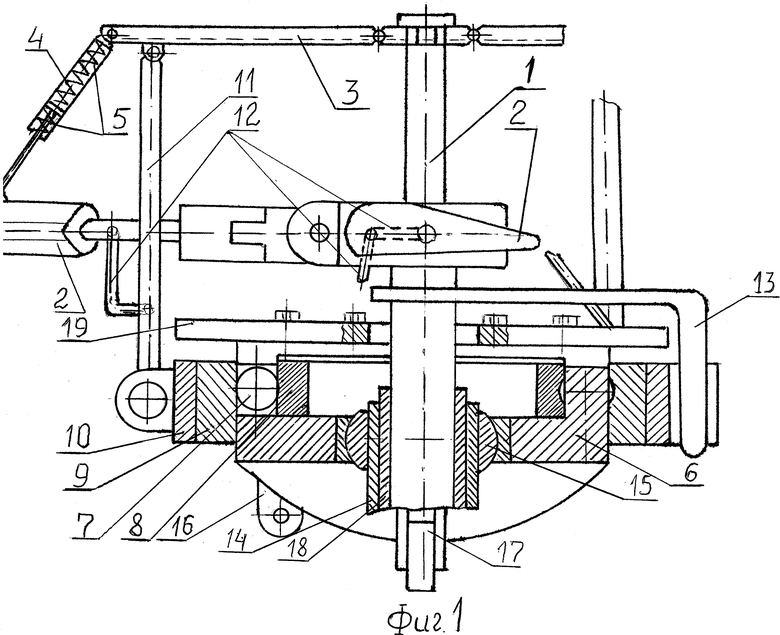
Автомат перекоса вертолета, содержащий несущий винт с узлами крепления лопастей, вращающееся кольцо с тягами поворота лопастей, сережки поперечного и продольного управления несущим винтом, управление общим шагом несущего винта, отличающийся тем, что, с целью повышения летных и технических характеристик вертолета, лопасти, совершая круговое азимутальное вращение, не только меняют свой угол атаки при каждом положении, но и производят колебания в вертикальной и горизонтальных плоскостях с поворотами в сторону вращения, достигаемые путем установки специального подшипника, в котором сепаратор выполнен в виде чашки с прорезями, куда вставлены шарики, ограниченные обоймами, внутренней, свободно вращающейся, а наружная обойма с бандажом для управления лопастями имеет дорожку-желобок, выполненную по растянутой синусоиде, причем половина ее имеет прямой участок, а сама чашка, установленная на подвижной втулке на сферическом подшипнике с возможностью поворота вперед-назад и на бок и свободного перемещения вдоль, управляя общим шагом вита, защемлена от проворачивания.
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2004 |
|
RU2261822C1 |
| US 6280141 B1, 28.08.2001 | |||
| Способ приклеивания резиновой подошвы к верху обуви | 1949 |
|
SU84341A1 |
| 0 |
|
SU162773A1 | |

