Изобретение относится к вертолетостроению и предназначено для управления величиной и направлением силы тяги несущего винта.
Известен автомат перекоса Б.Н.Юрьева (Фатеев С.С. «Основы конструкции вертолетов». Москва: Военное издательство, 1990, стр.168), который выбран в качестве прототипа. Автомат перекоса (АП) предназначен для управления величиной и направлением силы тяги несущего винта (НВ). Основными частями АП являются колонка и тарелка. Колонка включает ползун, направляющую ползуна и вал несущего винта на подшипниках. Управление величиной тяги НВ осуществляется одновременным и одинаковым для всех лопастей изменением углов установки (общего шага). Направление силы тяги изменяется наклоном плоскости вращения НВ за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Тарелка с помощью радиально-упорного подшипника и кардана, образованного наружным и внутренним кольцами, смонтирована на ползуне общего шага и приводится во вращение поводком, соединенным с валом НВ. Ползун с помощью рычага и тяги перемещается в вертикальном направлении по направляющей, смонтированной на корпусе главного редуктора. С помощью тяг продольного и поперечного управления и качалок тарелка может наклоняться в произвольном направлении относительно оси вала НВ. Перемещение ползуна вместе с тарелкой по направляющей вызывает одинаковое изменение углов установки всех лопастей и соответствующее изменение величины силы тяги НВ. Наклон тарелки относительно оси вала НВ вызывает циклическое изменение углов установки лопастей относительно среднего значения шага, определяемого положением ползуна. Наибольший угол установки каждая лопасть будет иметь в том азимуте, в котором ее тяга окажется в наивысшей точке наклоненной тарелки. Циклическое изменение углов установки и соответствующее изменение силы тяги лопастей вызывает их маховое движение, т.е наклон конуса вращения НВ Направление наклона определяется направлением наклона тарелки АП. Чтобы исключить наклон тарелки АП при перемещении ползуна, качалки тяг продольного и поперечного управления закреплены на ползуне и перемещаются вместе с ним. Принципиальная схема АП включает колонку с валом, направляющую ползуна, ползун, подшипник и тарелку автомата перекоса. Тарелка включает тяги продольного и поперечного управления, тяги управления лопастью, поводок, внутреннее кольцо автомата перекоса, наружное кольцо автомата перекоса. Кроме того, АП управляют рычаг общего шага и тяга общего шага.
Недостатки указанного автомата перекоса заключаются в его конструктивной сложности и относительно низкой надежности отдельных узлов. В частности, конструкция тарелки усложнена из-за наличия внутреннего и наружного колец, связанных между собой карданным механизмом, что снижает надежность и ресурс работы тарелки; колонка несущего винта включает коаксиально размещенные друг в друге вал, направляющую ползуна и ползун, что утяжеляет конструкцию. Вал перемещается в направляющей ползуна по подшипнику скольжения, а сам вал в нижнем конце сопрягается с направляющей ползуна посредством шлицевого соединения, что требует дополнительных усилий для преодоления усилия трения в шлицевом соединении.
Предлагаемое изобретение направлено на упрощение конструкции автомата перекоса, увеличение надежности работы тарелки и снижение веса вертолета.
Поставленная задача достигнута тем, что вал в колонке установлен на роликовых подшипниках, а тарелка установлена подвижно на шаровом подшипнике. При этом высота внутренней обоймы роликового подшипника больше высоты наружной обоймы. Внутренняя обойма шарового подшипника закреплена на ползуне, а его наружная обойма составлена из вкладышей, которые сопряжены с шаровой поверхностью внутренней обоймы шарового подшипника. При такой конструкции АП отпадает необходимость в применении направляющей ползуна.
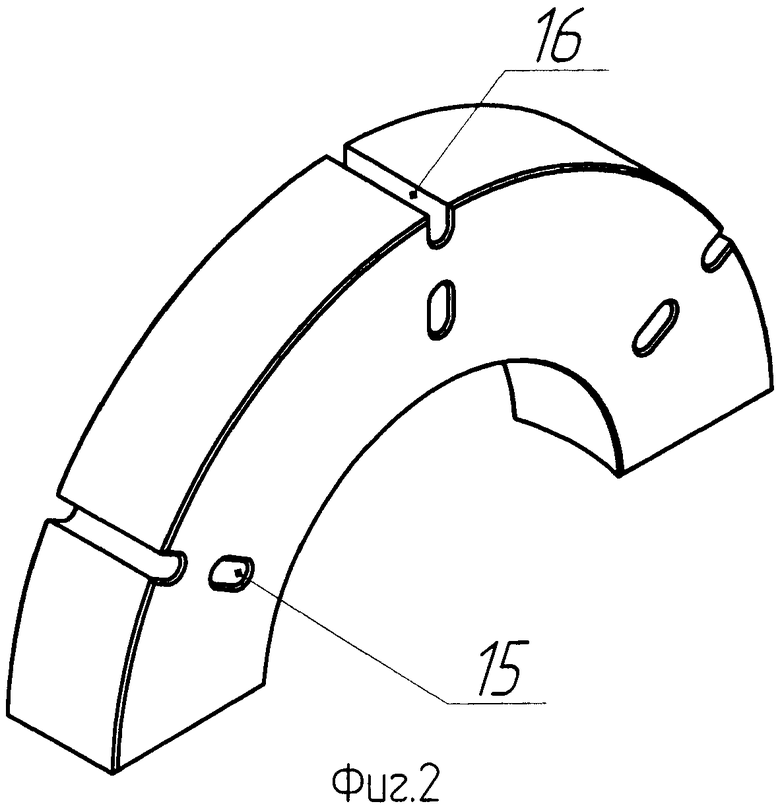
Один из возможных вариантов конструкции автомата перекоса приведен на чертежах. На фиг.1 приведен общий вид автомата перекоса, на фиг.2 приведена конструкция вкладыша.
Автомат перекоса включает колонку несущего винта 1 и тарелку 2. Колонка включает вал 3 НВ, размещенный коаксиально внутри корпуса 4 ползуна. Вал установлен в роликовом подшипнике 5, внутренняя обойма 6 которого по высоте больше, чем наружная обойма 7. Роликовый подшипник выбран потому, что конструктивно его внутренняя обойма может свободно перемещается по роликам вверх и вниз относительно наружной обоймы. В зависимости от длины вала в колонке может быть установлено более двух роликовых подшипников. Для наклона тарелки применен шаровой подшипник. Снаружи ползуна закреплена внутренняя обойма шарового подшипника 8, на которой установлена тарелка 2. Тарелка включает радиально-упорный подшипник, состоящий из внутренней 9 и наружной 10 обойм, и размещенные радиально внутри подшипника вкладыши, выполненные из композитного материала 11 и 12, трущиеся поверхности которых сопряжены с шаровой поверхностью обоймы 8. Снизу и сверху вкладыши зажаты прижимными кольцами 13, опирающимися также на внутреннюю обойму 9. Между собой прижимные кольца стянуты крепежом 14, проходящим через сквозные пазы 15, выполненные во вкладышах. В прижимных кольцах и вкладышах выполнены также пазы 16. Эти пазы необходимы для регулирования усилия прижима вкладышей к шаровой поверхности обоймы 8. Усилие прижима (значит, и величину зазора) юстируют при увеличении зазора между вкладышами и обоймой 8 в процессе износа вкладышей вследствие трения. Усилие прижима регулируют следующим образом. Ослабляют крепеж 14, вставляют в пазы 16 клинья и подбивают их, прижимая вкладыши к обойме 8. После этого затягивают крепеж и извлекают клинья. Усилие прижима контролируют прибором.
К нижнему прижимному кольцу шарнирно прикреплены тяги продольного и поперечного управления 17 и 18, связанные с ручкой управления вертолетом. На наружной обойме 10 радиально-упорного подшипника установлены обечайки 19 и 20, которые скреплены между собой крепежом 21. Верхняя обечайка снабжена шарнирно установленными тягами 22 управления лопастями (в данном случае их три), соединяемые с рычагами поворота лопастей. Ползун 4 имеет возможность передвигаться в вертикальном направлении под воздействием усилия рычага общего шага («шаг-газа») с рукояткой управления коррекцией. При этом ползун, отцентрированный роликовыми подшипниками 5, свободно и с минимальным трением скользит вдоль вала 3 по поверхности внутренней обоймы 6, поднимая и тарелку 2. Следует отметить, что внутренняя обойма 9 радиально-упорного подшипника не вращается вокруг оси вала, а наружная обойма 10 вместе с обечайками и тягами 22 вращается. Наружная обойма 10 и вал 3 связаны поводком (на чертеже не указан), т.е. вращение вала через поводок передается наружной обойме.
Автомат перекоса работает следующим образом.
При помощи рычага общего шага приводятся в действие тяга общего шага, которая через качалку управления общим шагом поднимает ползун 4 вдоль вала 3. При этом поднимается и тарелка 2, установленная на ползуне. Соответственно на одинаковую высоту поднимаются и тяги управления лопастями 22, которые через рычаги поворота лопастей НВ поворачивают вокруг своих осей одновременно все лопасти на один и тот же угол. Так осуществляется управление общим шагом несущего винта.
Направление же силы тяги изменяется наклоном плоскости вращения НВ за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Осуществляется это при помощи ручки управления вертолетом. При этом связанные с ручкой управления тяги продольного и поперечного управления 17 и 18 наклоняют тарелку 2 и тяги 22 относительно оси вала НВ, вызывая циклическое изменение углов установки лопастей относительно среднего значения шага, определяемого положением ползуна 4. Циклическое изменение углов установки и соответствующее изменение силы тяги лопастей вызывает маховое движение лопастей, т.е наклон конуса вращения НВ. Таким образом, направление наклона НВ определяет направление наклона тарелки АП.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВТУЛКА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2009 |
|
RU2401773C1 |
| АВТОМАТ ПЕРЕКОСА | 2016 |
|
RU2656737C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2004 |
|
RU2261822C1 |
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2021 |
|
RU2754784C1 |
Изобретение относится к вертолетостроению и предназначено для управления величиной и направлением силы тяги несущего винта. Автомат перекоса включает колонку несущего винта (1), тарелку (2) и механизмы управления величиной и направлением силы тяги несущего винта. Колонка включает в себя вал (3), который установлен в роликовом подшипнике (5). Внутренняя обойма (5) роликового подшипника по высоте больше наружной обоймы (7). Для наклона тарелки используется шаровой подшипник (8). Тарелка включает радиально-упорный подшипник, внутри которого размещены вкладыши (11) и (12), зажатые прижимными кольцами (13). К нижнему прижимному кольцу шарнирно прикреплены тяги продольного и поперечного управления (17) и (18), связанные с ручкой управления вертолетом. Направление силы тяги изменяется наклоном плоскости вращения несущего винта за счет циклического изменения углов установки лопастей в зависимости от их азимутального положения. Изобретение направлено на упрощение конструкции автомата перекоса, увеличение надежности работы тарелки и снижение веса вертолета. 3 з.п. ф-лы, 2 ил.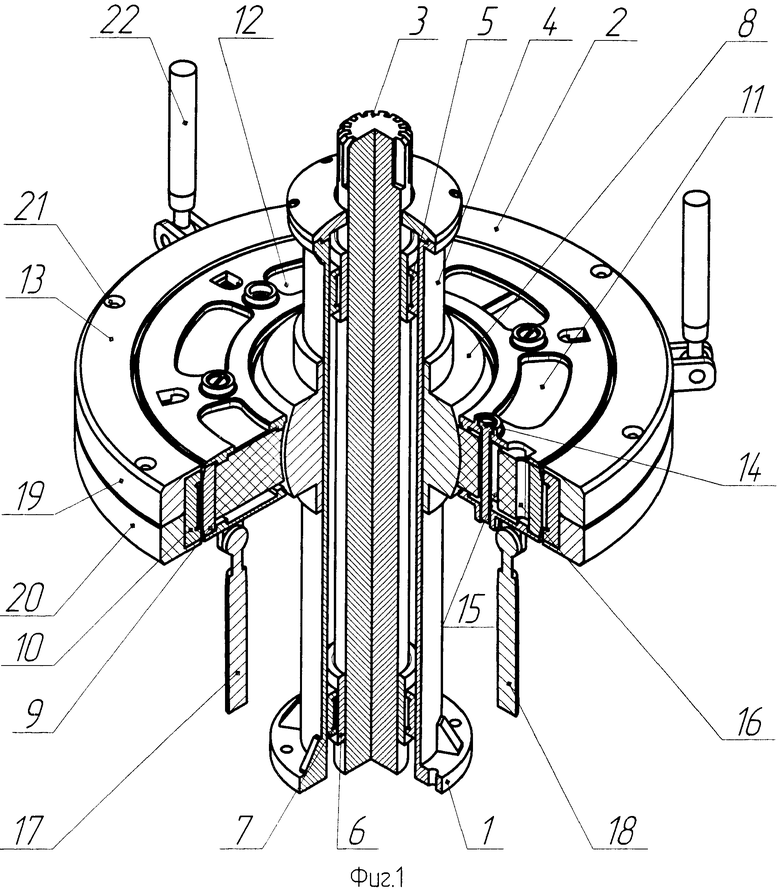
1. Автомат перекоса, включающий колонку и тарелку, механизмы управления величиной и направлением силы тяги несущего винта, отличающийся тем, что вал в колонке установлен на роликовых подшипниках, а тарелка установлена подвижно на шаровом подшипнике, причем высота внутренней обоймы роликового подшипника больше высоты наружной обоймы, внутренняя обойма шарового подшипника закреплена на ползуне, а его наружная обойма составлена из радиально размещенных вкладышей, которые сопряжены с шаровой поверхностью внутренней обоймы шарового подшипника.
2. Автомат перекоса по п.1, отличающийся тем, что вкладыши по окружности снабжены сквозными пазами.
3. Автомат перекоса по п.2, отличающийся тем, что вкладыши зажаты прижимными кольцами, стянутыми меж собой крепежом через сквозные пазы во вкладышах, а сами вкладыши имеют возможность передвигаться по направлению к оси внутренней обоймы шарового подшипника для регулирования усилия прижатия к ее поверхности.
4. Автомат перекоса по п.3, отличающийся тем, что вкладыши выполнены из композитного материала.
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| US 2007084962 A1, 19.04.2007 | |||
| US 6394387 В1, 28.05.2002. | |||

