1
Изобретение относится к машиностроению.
Известен клиновой механизм свободного ходя, содержащий обойму, охватывающую вал с эксцентриком, промежуточное кольцо и подпружиненный клин, расположенные между эксцентиром и обойной связанной с промежуточным кольцом 1 .
Известен клиновой механизм свободного хода, содержащий обойму, охватывающую вал, на поверхности которого выполнены эксцентриковые участки и углубления между ними, расположенные в плоскостиJ перпендикулярной оси вала, клинья контактирующие с обоймой и механизм управления, связанный с клиньями и расположенный сооснр валу С 2.
Однако известный механизм имеет недостаточную нагрузочную способность.
Цель и-зобретения - повышение нагрузочной способности.
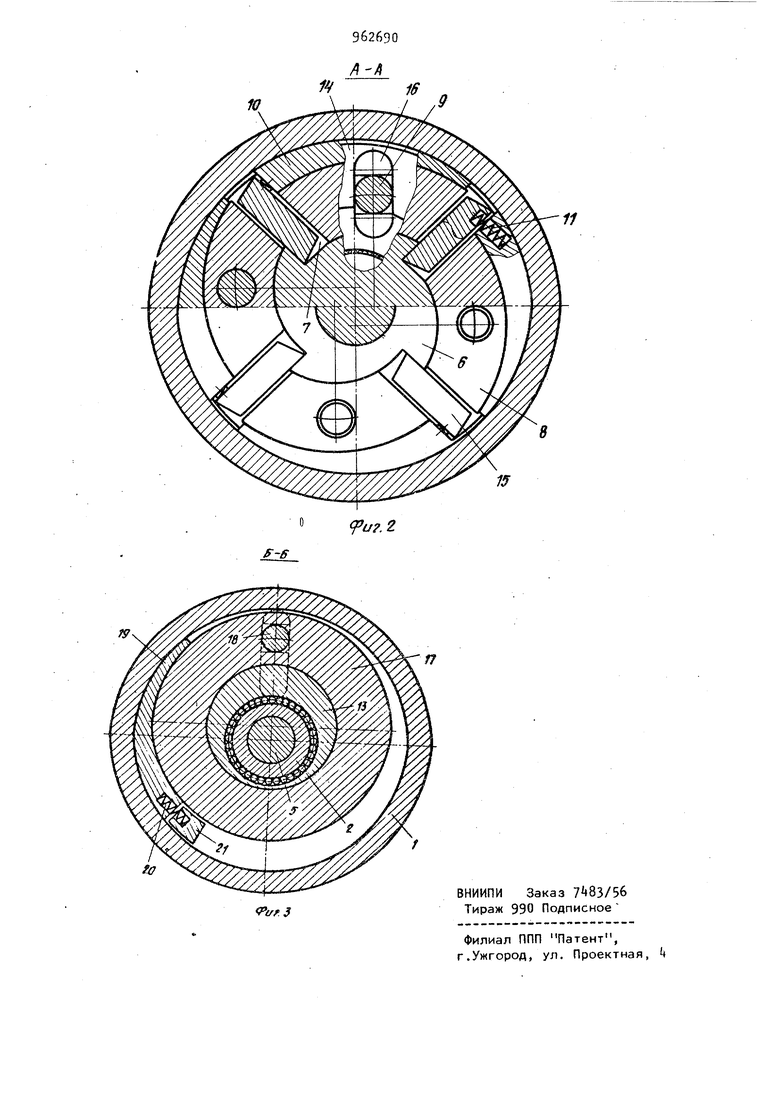
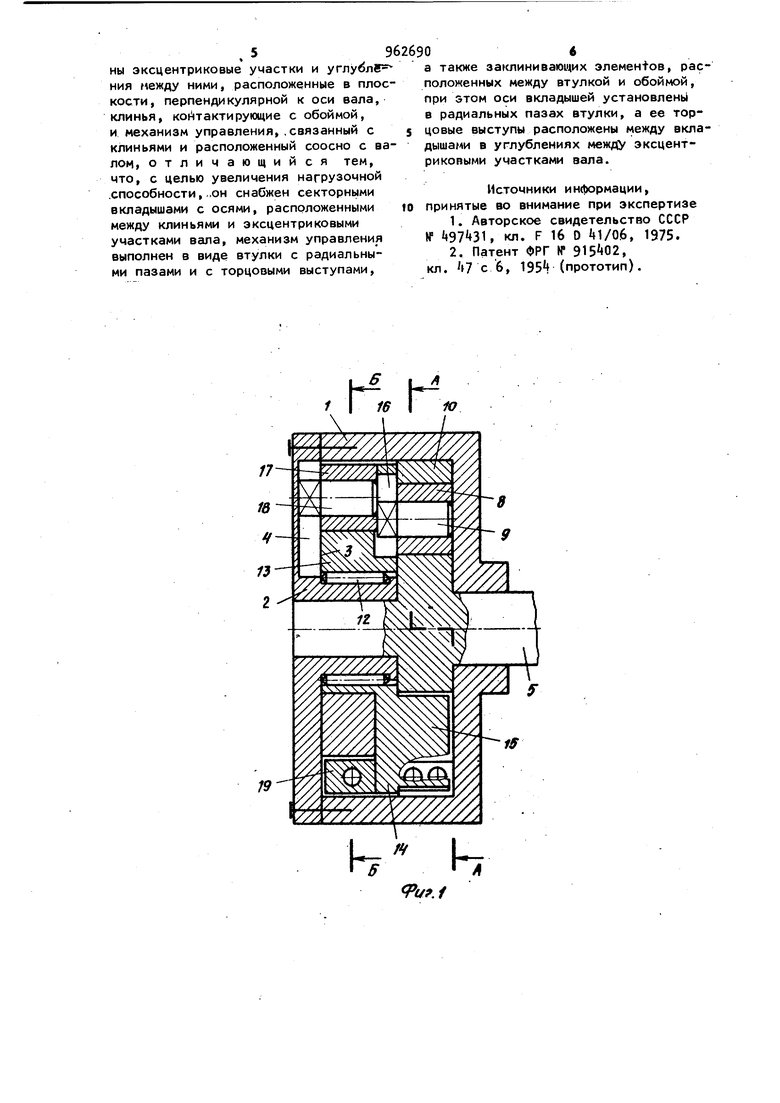
Поставленная цель достигается зг , счет того, что клиновой механизм свободного хода, содержащий обойму, охватывающую вал, на поверхности которого выполнены эксцентриковые участки и углубления, между ними расположены в плоскости, перпендикулярной оси вала, клинья, конт актирующие с обоймой, и механизм управления, связанный с клиньями и расположенный соосно с валом, снабжен секторными вкладышами с осями, расположенными между клиньями и эксцентриковыми участками вала, механизм управления выполнен ,в виде втулки с радиальными пазами и с торцовыми выступами, а также заклинивающих Элементов, расположенных между втулкой и обоймой, при этом оси В1 ладышей установлены в р-адиальных пазах втулки, а ее торцовые выступы расположены между вкладышами в углублениях между эксцентриковыми участками вала. На фиг. 1 показан осевой разрез механизма с местными вырывами; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1. Механизм имеет клиновой механизм свободного хода и механизм управления в виде обгонной муфты. Клиновой механизм свободного хода имеет обойму 1, выполненную заодно со.ступицей 2 на внутреннем торце 3 и имеющую на этом же торце радиальный паз , В обойме 1 расположен также эксцентриковый вал 5, выполненный с несколькими, например четырьмя эксцрнтриковыми участками 6, разномерно расположенными в одной плоскости попе речного сечения аала 5. Эксцентриковые участки 6 отделены друг от друга углублениями 7. На эксцентриковых участках 6 свободно размещены секторные вкладыши 8, каждый из них имеет отверстие, в которое свободно вставлены оси 9. Между обоймой 1 и вкладышами 8 установлены клинья 10, которые прижимаются к поверхности обоймы 1 и вкладышей 8 пружинами 11. Механизм управления расположен соосно валу 5 на ступице 2 на роликах 12. Ведущий элемент механизма управления выполнен в виде эксцентрика 13 С фланцем , на торце которого имеются выступы 15 и радиальные пазы 1б. Выступы 15 расположены в углуб лениях 7 между соседними эксцентриковыми участками 6,.а в радиальных па зах 16 размещены оси 9 вкладышей 8. На эксцентрик 13 свободно насажено кольцо 17, имеющее отверстие, в которое свободно вставлена ось 18, выступающая часть которой входит в радиаль ный паз i| обоймы 1. В пространстве, образованном цилиндрическими поверхностями обоймы 1 и кольца 17, расположен заклинивающий элемент в виде клина 19, который прижимается к обойме 1 и кольцу 17 пружиной 20, опирающейся, в свою очередь, на упор 21, закрепленный на фланце I эксцентрика 13. Названные детали образуют клиновой механизм свободного хода, служащии в качестве односторонней кинематической связи. Такой кинематической связью может быть и другой тип обгонного механизма, например, роликовый механизм свободного хода. Клинья 10 и 19 своими острыми частями обращены в одну сторону (по часовой стрелке) по ходу вращения. Угол клиньев 10 и 19 меньше удвоенного угла трения. Механизм работает следующим образом. При повороте вала 5 против часо вой стрелки его эксцентриковые участки 6 давят на вкладыши 8. Радиальному перемещению вкладышей 8 вместе с осями 9 препятствуют клинья 10. При угловом перемещении секторов 8 оси 9 через пазы 16 на фланце 1 эксцентрика 13 поворачивают последний в ctopoну поворота эксцентрикового вала 5. Эксцентрик 13 нажимает на кольцо 17, его радиальному перемещению препятствует клин 19. Повороту кольца относительно обой препятствует ось 18. Таким обра ° эксцентрик 13 не может провернуть.. .°. .., могут провернуться относительно обой,мы и вкладыши 8, соединенные с эксцентриком 13 осями 9. При повороте вала 5 против часовой стрелки весь механизм вращается валом как одно целое. При -повороте вала 5 по часовой стрелке торцы эксцентриковых участков 6 давят на выступ 15 эксцентрика 13 и поворачивают его. Кольцо 17 при этом отходит от клина 10, обеспечивая мгновенное расклинивание эксцентрика 13 относительно обоймы 1. В то же время вкладыши 8 отходят от -Кяиньев 10, обеспечивая мгновенное расклинивание вала 5 относительно обоймы 1. Расклинивающийся эксцентрик 13 вместе с осями 9 секторными вкладышами 8, клиньями 10 и пружинами 11 поворачивается вслед за 5. Таким образом, при колебаниях вала 5 на обойму 1 передается момент только одного направления. Так как на механизм управления, значит и на его клин, приходится g примерно одна треть всего момента, передаваемого всем механизмом, то общая нагрузочная способность предлагаемого механизма при одинаковых габаритах с известным механизмом увеличиэается. Формула изобретения Клиновой механизм свободного хо-. да, содержащий обойму, охватывающую вал, на поверхности которого выполнены эксцентриковые участки и угпубпК ния между ними, расположенные в плоскости, перпендикулярной к оси вала, клинья, контактирующие с обоймой, и механизм управления,.связанный с клиньями и расположенный соосно с валом, отличающийся тем, что, с целью увеличения нагрузочной .способности, ..он снабжен секторными вкладышами с осями, расположенными между клиньями и эксцентриковыми участками вала, механизм управления выполнен в виде втулки с радиальными пазами и с торцовыми выступами.
а также заклинивающих элeмeнtoв, расположенных между втулкой и обоймой, при этом оси вкладышей установлены в радиальных пазах втулки, а ее торцовые выступы расположены между вкладышами в углублениях эксцентриковыми участками вала.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № i 97t31, кл. F 16 О , 1975.
2.Патент ФРГ № 915«02, кл. с 6, 195Н (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Клиновая муфта свободного хода | 1986 |
|
SU1402734A1 |
| Клиновой механизм свободного хода | 1981 |
|
SU1049701A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU1087714A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Клиновая муфта свободного хода | 1976 |
|
SU657194A1 |
| Эксцентриковая муфта свободного хода | 1990 |
|
SU1754972A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1971 |
|
SU302525A1 |
| Муфта свободного хода | 1979 |
|
SU1038648A1 |
| Клиновой механизм свободного хода | 1986 |
|
SU1399541A1 |
| Эксцентриковая муфта свободного хода | 1981 |
|
SU1006815A1 |