Изобретение относится к области информационных технологий на транспорте.
Известно устройство для контроля интенсивности движения транспортных средств (ТС), основанное на принципе размещения под дорожным полотном индуктивной петли (патент РФ. №2178920, G08G 1/042). Известное устройство содержит охватывающую по периметру зону контроля проезжей части дороги индуктивную петлю и активный элемент. К активному элементу последовательно подключены формирователь импульсов, блок измерения частоты, блок формирования логического сигнала.
К существенным недостаткам такого типа устройств относятся необходимость разрушения дорожного полотна при монтировании устройств, а также возможность разрушения этих устройств от нагрузки на дорожное полотно и при ремонте дорог.
Известна система контроля за движением транспортных средств, преимущественно предназначенная для автоматического контроля соблюдения правил дорожного движения, автоматического принятия решения по нарушениям и доведения их до сведения нарушителей без участия человека (патент РФ №2374692, G08G 1/01). Система включает снабженные считывающими устройствами множество стационарных пунктов контроля движения транспортных средств, оборудованных средствами их идентификации.
Данное устройство имеет ограниченные функциональные возможности, так как в силу своей технической ориентации (направленности) на контроль за соблюдением правил дорожного движения, оно не обеспечивает в полной мере сбор качественной и количественной информации, характеризующей параметры потока транспортных средств в целом.
Известна также система для автоматизированного контроля движения транспортных средств на базе автоматизированного контроля интенсивности движения транспортных средств по каждой из полос (патент РФ №2292085, G08G 1/01, прототип). Система характеризуется расположением детекторов транспорта (радиолокационных сенсоров, излучающих зондирующие сигналы) непосредственно над каждой из полос движения. Указанные детекторы транспорта связаны многожильным кабелем с блоком регистрации и управления.
К недостаткам данного технического решения следует отнести то, что в виду примененного в нем принципа сравнения мощности отраженного электромагнитного сигнала с заданным порогом, работа устройства будет неустойчивой и соответственно недостаточно надежной при его установке в непосредственной близости от массивных металлических и железобетонных конструкций, вследствие отражения радиосигналов от указанных конструкций по боковым лепесткам диаграммы направленности. Это обстоятельство усложняет и ограничивает установку такого рода систем на искусственных дорожных сооружениях, таких как пешеходные переходные мосты и автомобильные мосты, трубопроводы. Кроме того, применение в данной системе волн радиочастотного диапазона требует согласующих документов для диапазона используемых частот и уровней мощности излучения в ФГУП ГРЧЦ.
Задачей, на решение которой направлено изобретение, является упрощение устройства, в том числе его установки и обслуживания, а также повышение надежности работы на загруженных городских трассах и расширение сферы использования.
Техническим результатом изобретения является создание системы автоматической регистрации структуры и интенсивности движения транспортных средств с возможностью использования для ее установки существующих тех или иных конструкций, расположенных над проезжей частью в зоне возможного влияния на результаты измерений массивных металлических или железобетонных конструкций, с оперативным получением высокоточной информации о структуре и интенсивности движения транспорта непосредственно по каждой полосе, с классификацией транспортных средств по скорости, габаритам, в том числе по высоте с формированием продольного контура ТС, а также по количеству проездов ТС за единицу времени.
Заявленный технический результат достигается за счет того, что система автоматической регистрации структуры и интенсивности движения транспортных средств, содержащая излучающие зондирующие сигналы детекторы транспорта, установленные над каждой из полос движения и связанные с блоком управления и регистрации, согласно изобретению, включает над каждой из полос движения второй детектор транспорта, при этом указанные детекторы транспорта расположены попарно вдоль продольной оси полосы движения и выполнены в виде приемопередающих датчиков, каждый из которых включает снабженные вертикально установленными рупорами излучатель ультразвуковых колебаний и приемник ультразвуковых колебаний, устройство измерения температуры воздуха и микроконтроллер, выход которого связан с входом указанного излучателя ультразвуковых колебаний, а вход - с выходом указанного приемника ультразвуковых колебаний, первый вход-выход указанного микроконтроллера через интерфейс связан с входом-выходом блока управления и регистрации, второй вход-выход указанного микроконтроллера связан с входом-выходом устройства измерения температуры воздуха, при этом указанный блок управления и регистрации содержит управляющий компьютер, первый вход-выход которого соединен с приемопередающим устройством связи, а вторые входы-выходы связаны с соответствующими интерфейсами, другие входы-выходы которых являются входами-выходами блока управления и регистрации.
В указанном блоке управления и регистрации в качестве управляющего компьютера, преимущественно, использован одноплатный компьютер.
При этом указанный блок управления и регистрации содержит n пар входных интерфейсов, где n - число полос движения транспорта, над которыми установлена система.
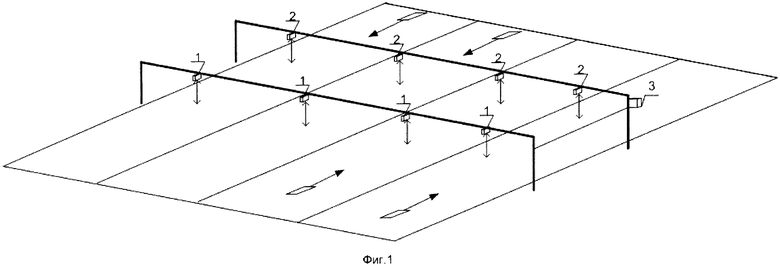
На фиг.1 представлен общий вид системы (расстановка), согласно изобретению, на фиг.2 - то же, структурная схема.
Система согласно изобретению содержит приемопередающие датчики 1, 2, расположенные попарно вдоль движения транспортных средств над каждой из полос движения транспорта, связанные с блоком 3 управления и регистрации (фиг.1, фиг.2). Указанный блок 3 содержит управляющий компьютер 4, преимущественно одноплатный компьютер, связанный с приемопередающим устройством 5 связи и через n пар (по числу полос движения транспорта) интерфейсов 6 - с приемопередающими датчиками 1, 2. Каждый из указанных приемопередающих датчиков 1, 2 содержит интерфейсы 7, связанные с первым входом-выходом микроконтроллера 8, другой вход-выход которого соединен с входом-выходом устройства 9 измерения температуры воздуха. Выход микроконтроллера 8 связан излучателем 10 ультразвуковых колебаний, а его вход - с выходом приемника 11 ультразвуковых колебаний. Указанные излучатель 10 ультразвуковых колебаний и приемник 11 ультразвуковых колебаний снабжены, соответственно, акустическими рупорами 12, 13, обеспечивающими направленность ультразвуковых колебаний в сторону движущихся транспортных средств и эффективный прием отраженных от них ультразвуковых колебаний.
Приемопередающие датчики 1, 2 соединены с блоком 3 управления и регистрации и линиями связи 14, 15, соответственно.
Работа системы автоматической регистрации структуры и интенсивности движения транспортных средств, согласно изобретению, осуществляется следующим образом.
Над каждой полосой движения транспорта располагают приемопередающие датчики 1, 2 вдоль продольной оси полосы движения на расстоянии три или более метров друг от друга. Блок 3 управления и регистрации располагают на этом же участке дороги и соединяют его линиями связи 14, 15 со всеми приемопередающими датчиками 1, 2.
Использование в блоке 3 управления и регистрации в качестве управляющего компьютера 4 одноплатного компьютера, с широким диапазоном рабочих температур (от минус 40°C до плюс 85°C), не требует наличия для установки данного блока специального помещения.
По управляющему сигналу от блока 3 управления и регистрации излучатели 10 ультразвуковых колебаний приемопередающих датчиков 1, 2 начинают генерировать ультразвуковые зондирующие импульсы. При этом зондирующие импульсы от приемопередающих датчиков 1, 2, расположенных вдоль полосы, излучаются синхронно, синхронизацию обеспечивает блок 3 управления и регистрации через интерфейсы 6, 7. Передающие рупоры 12 формируют диаграмму направленности ультразвуковой волны, главный лепесток которой распространяется по направлению к дорожному полотну. Звуковая волна, встретившись с объектом на своем пути, отражается от объекта и попадает в рупоры 13 приемника 11 ультразвуковых колебаний, в котором усиливается и нормируется. Далее принятый сигнал с приемника 11 ультразвуковых колебаний поступает на вход микроконтроллера 8, в котором преобразовывается в цифровой сигнал. Объектом отражения ультразвукового сигнала может быть дорожное полотно или часть ТС, расположенная в зоне главного лепестка и диаграммы направленности рупора 13. При этом по запросу микроконтроллера 8 на его другой вход-выход поступает информация о температуре окружающей среды от устройства 9, измеряющего температуру окружающей среды. Изменения температуры необходимо учитывать, так как при этом изменяется скорость распространения звуковых колебаний.
Микроконтроллер 8 вычисляет временную задержку между зондирующим импульсом и принятым откликом с учетом данных устройства 9 измерения температуры окружающей среды. Информация о задержке передается через интерфейсы 6, 7 в блок 3 управления и регистрации. Так как за время проезда ТС под приемопередающими датчиками 1, 2 зондирующие импульсы посылаются несколько раз, то по каждому ТС в блоке 3 формируется продольный контур верхней части ТС - капот, кабина, багажник, кузов и другие элементы верхнего контура ТС.
Работа приемопередающего датчика 2 аналогична работе приемопередающего датчика 1. При этом под приемопередающим датчиком 2 транспортное средство (ТС), проезжающее по той или иной полосе, появляется с временной задержкой относительно проезда над приемопередающим датчиком 1, определяемой скоростью движения ТС. Данные с приемопередающего датчика 2 поступают по линии связи 15 в управляющий компьютер 4 блока 3 управления и регистрации через другой интерфейс 6. Управляющий компьютер 4 блока 3 управления и регистрации по временной задержке между появлением ТС в области диаграммы направленности приемопередающего датчика 1 и приемопередающего датчика 2 определяет скорость ТС, а по скорости и по временным задержкам пачки импульсов от каждого транспортного средства определяется длина, высота и конфигурация ТС в целом. Эти данные в блоке 3 управления и регистрации используются для классификации ТС.
Количество полос движения, обрабатываемых системой, зависит от количества установленных в блоке 3 управления и регистрации последовательных интерфейсов 6 и может составлять от 1 до 8, а при необходимости и более 8.
Полученные и обработанные в блоке 3 управления и регистрации данные через приемопередающее устройство 5 связи (например, модем GSM/GPRS) по соответствующему запросу передаются на удаленный сервер (не показан).
Управляющий компьютер 4 и микроконтроллер 8 снабжены разработанными авторами настоящего изобретения специальными программами для ЭВМ, обеспечивающими обработку поступающих в них данных, с получением, как это описано выше, параметров, характеризующих транспортный поток.
Устройство согласно изобретению позволяет осуществлять контроль движения ТС отдельно по каждой полосе движения, измерение габаритов ТС по высоте, длине, измерение скорости, подсчет количества проезжающих ТС за единицу времени, что позволяет определить интенсивность нагрузки на автомагистрали в различное время суток, и использовать собранные данные для рациональной организации дорожного движения. При этом система без принятия дополнительных мер по помехозащищенности, а также без согласования используемого частотного диапазона может быть достаточно просто размещена над проезжей частью в зоне готовых сооружений (например, на пешеходных переходных мостах, автомобильных мостах).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ГОРОДСКОГО ТРАНСПОРТА | 2016 |
|
RU2630945C1 |
| Способ идентификации транспортных средств при прохождении контрольных пунктов и устройство для его осуществления | 2021 |
|
RU2774222C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| Арктическая система вождения и навигационного обеспечения наземного транспорта | 2017 |
|
RU2652167C1 |
| СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С МНОГОСТОРОННЕЙ СВЯЗЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2755068C1 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И ВЫЯВЛЕНИЯ ЗАЯВЛЕННЫХ НА ПОИСК АВТОМОБИЛЕЙ ПРИ ПРОХОЖДЕНИИ КОНТРОЛЬНЫХ ПУНКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478232C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2279714C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И РЕГИСТРАТОР ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2333537C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
Изобретение относится к технике контроля движения транспортных средств. Предложенная система может быть установлена на существующих сооружениях, расположенных над проезжей частью, в зоне возможного влияния на результаты измерений массивных металлических или железобетонных конструкций. Система включает связанные с блоком управления и регистрации детекторы транспорта. Указанные детекторы транспорта расположены попарно вдоль продольной оси полосы движения и выполнены в виде приемопередающих датчиков, каждый из которых включает снабженные вертикально установленными рупорами излучатель ультразвуковых колебаний и приемник ультразвуковых колебаний, устройство измерения температуры воздуха и микроконтроллер. Выход микроконтроллера связан с входом излучателя ультразвуковых колебаний, а вход - с выходом приемника ультразвуковых колебаний. Первый вход-выход микроконтроллера через интерфейс связан с выходом блока управления и регистрации, а второй вход-выход микроконтроллера связан с входом-выходом устройства измерения температуры воздуха. Блок управления и регистрации содержит управляющий компьютер, первый вход-выход которого соединен с приемопередающим устройством связи, а вторые входы-выходы связаны с соответствующими интерфейсами, другие входы-выходы которых являются входами-выходами блока управления и регистрации. Система обеспечивает классификацию транспортных средств по скорости, габаритам, в том числе по высоте, а также по количеству проездов за единицу времени. Она характеризуется упрощенными конструкцией, надежностью установки и обслуживания, а также повышенной надежностью работы на загруженных городских трассах и расширенной сферой использования. 2 з.п. ф-лы, 2 ил.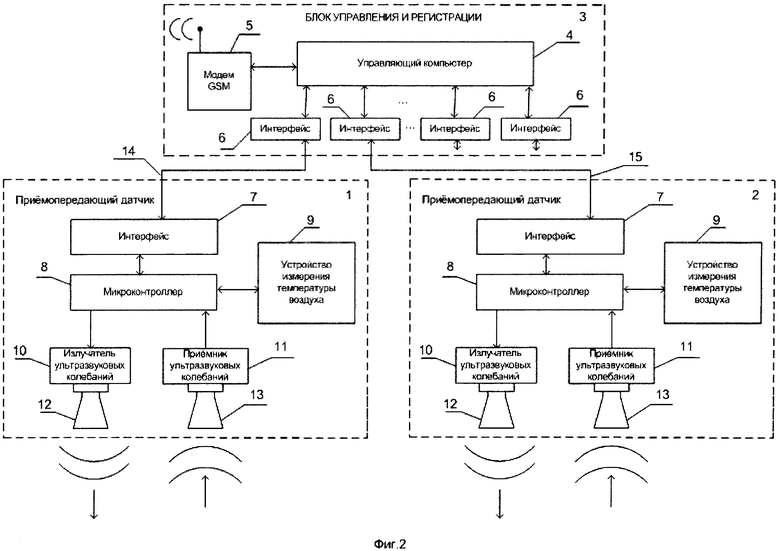
1. Система автоматической регистрации структуры и интенсивности движения транспортных средств, содержащая излучающие зондирующие сигналы детекторы транспорта, установленные над каждой из полос движения и связанные с блоком управления и регистрации, отличающаяся тем, что она включает над каждой из полос движения второй детектор транспорта, при этом указанные детекторы транспорта расположены попарно вдоль продольной оси полосы движения и выполнены в виде приемопередающих датчиков, каждый из которых включает снабженные вертикально установленными рупорами излучатель ультразвуковых колебаний и приемник ультразвуковых колебаний, устройство измерения температуры воздуха и микроконтроллер, выход которого связан с входом указанного излучателя ультразвуковых колебаний, а вход - с выходом указанного приемника ультразвуковых колебаний, первый вход-выход указанного микроконтроллера через интерфейс связан с выходом блока управления и регистрации, второй вход-выход указанного микроконтроллера связан с входом-выходом устройства измерения температуры воздуха, при этом указанный блок управления и регистрации содержит управляющий компьютер, первый вход-выход которого соединен с приемопередающим устройством связи, а вторые входы-выходы связаны с соответствующими интерфейсами, другие входы-выходы которых являются входами-выходами блока управления и регистрации.
2. Система по п.1, отличающаяся тем, что в качестве управляющего компьютера блока управления и регистрации она включает одноплатный компьютер.
3. Система по п.1, отличающаяся тем, что указанный блок управления и регистрации содержит n пар входных интерфейсов, где n - число полос движения транспорта, над которыми установлена система.
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2292085C1 |
| СИСТЕМА КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2374692C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2276809C2 |
| US 3140485 A, 07.07.1964 | |||
| Устройство для перекрытия ствола скважины | 1980 |
|
SU945381A1 |

