Изобретение относится к области информационных технологий контроля за движением транспортных средств в целях определения интенсивности нагрузки на автомагистрали.
Известны устройства контроля интенсивности движения транспортных средств (ТС) по автодорогам, основанные на индукционном принципе. Эти устройства содержат магнитные датчики (сенсоры), располагаемые под дорожным полотном в виде индукционного микрозонда, либо индукционной петли (например, фирмы «Элис», Россия, Санкт-Петербург; пат. №2178920 RU от 19.09.2000 г.; петлевой детектор LD-4 Siemens, Германия; классификатор Marksman 660 Golden River Traffic, Великобритания; индукционный микрозондовый датчик «Canoga» 3M, США).
Однако эти устройства не имеют достаточной надежности из-за возможности разрушения дорожного полотна и требуют земляных работ.
Известны видеоконтрольные и инфракрасные устройства контроля, основанные на получении изображения ТС либо его отраженного инфракрасного сигнала, однако из-за влияния погодных условий, в частности из-за высокого поглощения сигналов оптического диапазона в завесах тумана, дождя, снега эти устройства работают ненадежно.
Известен детектор транспорта Спектр 1 (см. www.olvia.ru Продукция фирмы, продажа и сервис, новости, обзоры в прессе), содержащий радиолокационное устройство с линейной частотной модуляцией, монтируемое на опорах освещения и других искусственных сооружениях, расположенных на обочине и соединенных многожильным кабелем с информационно-измерительным блоком.
Однако из-за используемого принципа селекции по дальности через оценку разности частот передачи и приема при линейно-частотно-модулированной (ЛЧМ) модуляции описанное устройство не позволяет разделять ТС по полосам движения при одновременном прохождении их по ряду полос. Кроме того, из-за зависимости мощности сигнала от расстояния, невысокой точности определения скорости движения ТС, наличия мертвых зон из-за закрытия от прямой видимости малоразмерных ТС крупногабаритными ТС, движущимися по ближайшей к радиолокатору полосе движения, подобное радиолокационное устройство дает ошибки классификации при счете интенсивности движения.
Заявляемая система для автоматизированного контроля движения транспорта решает задачу автоматизированного контроля интенсивности движения транспортных средств (ТС) по каждой из полос движения по комплексу параметров - числу ТС в единицу времени, скорости движения, объему ТС с их классификацией по группам грузоподъемности, в соответствии с требованиями стандартов - Европейского EURO 6 и Российского ВСН 45-68.
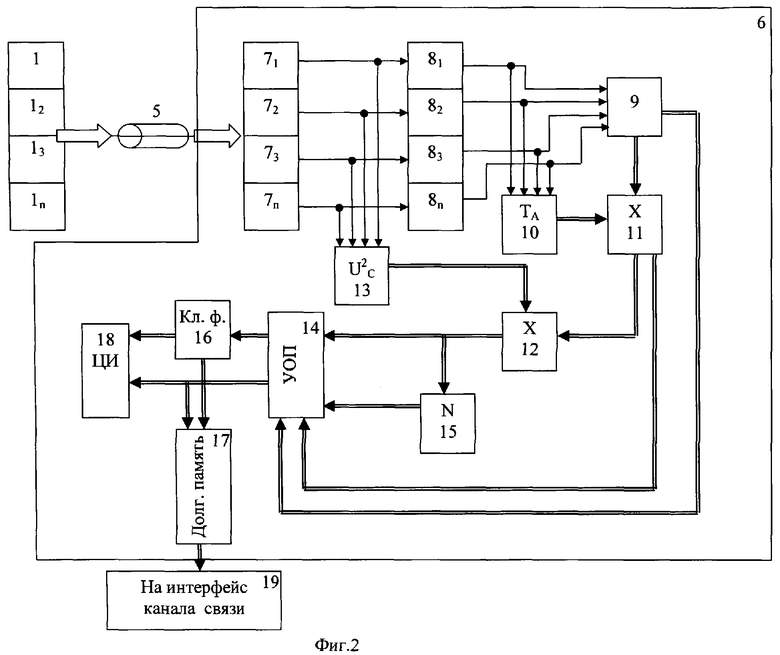
Поставленная задача решается тем, что в системе для автоматизированного контроля движения транспортных средств, содержащей детектор транспорта в виде радиолокационного устройства, соединенного по выходу многожильным кабелем с блоком регистрации и управления (БРУ), согласно изобретению радиолокационное устройство выполнено в виде отдельных радиолокационных сенсоров, излучающих немодулированные сигналы и закрепленных над каждой из полос движения с наклоном диаграммы направленности относительно вертикальной оси, а БРУ содержит фильтры нижних частот, соединенные по одному из выходов с входами соответствующих компараторов, выходы которых соединены с входами устройств вычисления скорости движения и длительности аномальных сигналов, количество которых соответствует числу полос движения, выходы последних подсоединены к первым перемножителям, определяющим длину транспортного средства (ТС), один из выходов каждого из первых перемножителей соединен с соответствующим входом каждого из вторых перемножителей, другие входы которых соединены с первыми выходами устройств определения мощности аномального сигнала, а входы последних подсоединены к выходам фильтров нижних частот, выходы вторых перемножителей соединены с первыми входами устройств оперативной памяти (УОП) и с входами счетчиков числа проходящих по каждой полосе транспортных средств, выходами подсоединенных ко вторым входам устройств оперативной памяти, первыми выходами соединенных с классификатором, по вторым, третьим и четвертым входам УОП подсоединены соответственно к выходам счетчиков числа ТС, вторым выходам первых перемножителей, и вторым выходам устройств вычисления скорости по каждой из контролируемых полос, а выходы классификатора и вторые выходы УОП подсоединены к устройству долговременной памяти и цифровому индикатору.
Принципиальным отличием предлагаемой системы является расположение радиолокационных сенсоров непосредственно над каждой из полос движения под углом наклона диаграммы направленности относительно вертикальной оси и наличие в блоке регистрации и управления устройств определения скорости движения ТС по доплеровской частоте сигнала и классификации по объему ТС. Это позволяет решить задачу классификации и оценки скорости движения ТС без взаимного влияния соседних полос движения с достаточной для практики точностью.
Вновь введенные признаки разрешают техническое противоречие между удобством дистанционных радиолокационных измерений и возникающими при этом ошибками классификации.
На фиг.1 представлен общий вид системы для автоматизированного контроля движения транспорта, а на фиг.2 - ее структурная схема.
Система содержит радиолокационные сенсоры 11, 12,...,1n, где n - количество полос движения, закрепленные на тросе 2, подвешенном на опорах 3 над каждой из полос движения (а) транспортных средств (ТС) 4 с наклоном диаграммы направленности относительно вертикальной оси координат. Радиолокационные сенсоры 11,...,1n соединены по выходу многожильным кабелем 5 с блоком 6 регистрации и управления (БРУ), содержащим фильтры 71, 72,...,7n нижних частот, выходами соединенные с входами соответствующих компараторов 81, 82,...,8n, чьи выходы соединены с входами устройств вычисления скорости движения 9 и устройств вычисления длительности аномального сигнала 10, количество которых соответствует числу полос движения. При этом один из выходов каждого из устройств 9 и выходы устройств 10 подсоединены к первым перемножителям 11, определяющим длину ТС. Один из выходов каждого из первых перемножителей 11 соединен с одним из входов соответствующих вторых перемножителей 12, другим входом соединенных с соответствующими выходами устройств 13 определения мощности аномальных сигналов, а входы последних подсоединены соответственно к выходам фильтров 71, 72,...,7n нижних частот. Выходы вторых перемножителей 12 соединены с первыми входами устройств 14 оперативной памяти (УОП) и со входами счетчиков 15 числа ТС, проходящих по каждой полосе движения. Одним из выходов УОП 14 соединены с классификатором 16, по другим входам УОП 14 подсоединены соответственно к выходам счетчиков 15 числа ТС, вторым выходам первых перемножителей 11 и вторым выходам устройств вычисления скорости движения 9 по каждой из контролируемых полос. При этом выходы классификатора 16 и вторые выходы УОП 14 подсоединены к устройству 17 долговременной памяти и к цифровому индикатору 18, а по выходам устройство 17 долговременной памяти соединено с цифровым интерфейсом 19. Сечения диаграмм направленности (б) радиолокационных сенсоров изображены на фиг.1.
Система для автоматизированного контроля движения транспортных средств работает следующим образом:
Радиолокационные сенсоры 11, 12,...,1n, подвешенные на тросе 2 и опорах 3 над каждой из полос движения, облучают движущиеся ТС электромагнитной волной в пределах диаграммы направленности, наклоненной к вертикальной оси, например, под углом 15°. Такой угол оптимален для решаемой задачи, хотя может быть реализован в пределах 10°-30° в зависимости от ширины диаграммы направленности (б) и полосы движения (а).
Сигналы доплеровской частоты поступают на БРУ 6 по многожильному кабелю 5 в аналоговом виде на входы фильтров 7 и далее на компараторы 8, которые оцифровывают сигнал и позволяют устройству оценки скорости 9 по каждой из полос вычислить через доплеровские частоты скорость движения ТС.
Одновременно устройствами 10 оценивается длительность аномального сигнала ТА, превышающего установленный порог, а перемножитель 11 по данным скорости V и длительности аномалии определяет длину ТС, как произведение L=ТА·V.
Мощность сигнала оценивается в устройстве 13, как средний квадрат амплитуды  . Как известно, мощность отраженного от объекта радиолокационного сигнала пропорциональна эффективной поверхности рассеивания, а в данном случае «мгновенной» площади поперечного сечения ТС.
. Как известно, мощность отраженного от объекта радиолокационного сигнала пропорциональна эффективной поверхности рассеивания, а в данном случае «мгновенной» площади поперечного сечения ТС.
Произведение величин РC на L дает некоторую среднюю величину, характеризующую объем движущегося ТС, W=К·РcL, где К - коэффициент пропорциональности.
Этот результат, получаемый вторым перемножителем 12, запоминается в устройстве оперативной памяти 14, куда также поступают данные с устройства 15 о числе N транспортных средств, проходящих по данной полосе, длине ТС L и скорости движения V.
Классификатор 16 по данным, поступающим от устройства оперативной памяти 14, классифицирует проходящие ТС по классу грузоподъемности (легковые, малые, средние и тяжелые). Эти данные, а также данные по N, L, V запоминаются в устройстве долговременной памяти 17 и выводятся на цифровой индикатор 18, оперативно показывающий результаты наблюдения по всем классам ТС для каждой из полос движения.
Выход устройства долговременной памяти 17 через цифровой интерфейс 19 подсоединяется к любому каналу связи для передачи накопленных данных, либо к переносному устройству считывания информации.
Таким образом решается задача многополосного контроля движения ТС с оценкой их габаритов, скорости движения, числа в единицу времени, что является важным для развертываемых в России, да и других странах, пунктов контроля нагрузки на автомагистрали. Опытный образец устройства АСКТ-1 прошел успешные испытания на автомагистрали М65 Байкал-Москва под г. Красноярском.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2337407C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИИ СТРУКТУРЫ И ИНТЕНСИВНОСТИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2490718C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| Способ непрерывного контроля психофизиологического состояния водителей, перевозящих опасные грузы и пассажиров по дорогам общего пользования, система, его реализующая, и блок обработки и управления, используемый в ней | 2015 |
|
RU2662293C2 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| КОМПЛЕКС ВИДЕОФИКСАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2539676C2 |
| Система лазерного сканирования для определения параметров транспортного средства в потоке движения | 2023 |
|
RU2803398C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486597C1 |
| АДАПТИВНЫЙ КЛАССИФИКАТОР СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2008 |
|
RU2365052C1 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2444793C1 |
Изобретение относится к области информационных технологий контроля за движением транспортных средств (ТС) в целях определения интенсивности нагрузки на автомагистралях и может быть использовано при осуществлении управления дорожным движением. Система характеризуется расположением радиолокационных сенсоров непосредственно над каждой из полос движения под наклоном диаграммы направленности относительно вертикальной оси. В блоке регистрации и управления имеются устройства определения скорости движения ТС по доплеровской частоте сигнала и классификации по объему ТС. Эти признаки позволяют разрешить техническое противоречие между удобством дистанционных радиолокационных измерений и возникающими при этом ошибками классификации. Таким образом, обеспечивается многополосный контроль движения ТС с оценкой их габаритов, скорости движения, числа в единицу времени, что является важным для развертываемых и в России, и в других странах пунктов контроля нагрузки на автомагистрали. 2 ил.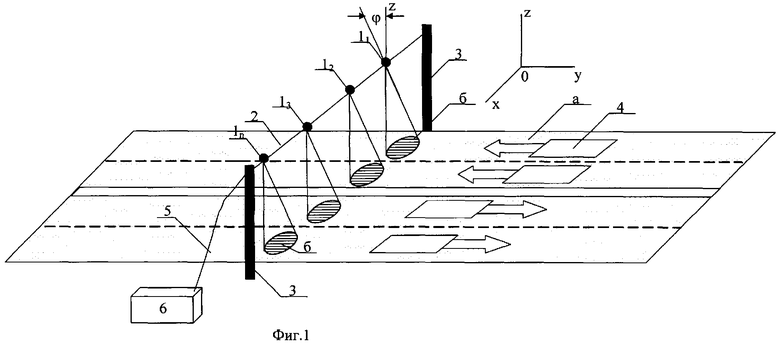
Система для автоматизированного контроля движения транспортных средств, содержащая детектор транспорта в виде радиолокационного устройства, соединенного по выходу многожильным кабелем с блоком регистрации и управления, отличающаяся тем, что радиолокационное устройство выполнено в виде отдельных радиолокационных сенсоров, излучающих немодулированные сигналы и закрепленных над каждой из полос движения с наклоном диаграммы направленности относительно вертикальной оси, а блок регистрации и управления содержит фильтры нижних частот, выходами соединенные с входами соответствующих компараторов, выходы которых соединены с входами устройств вычисления скорости движения и длительности аномальных сигналов, количество которых соответствует числу полос движения, выходы последних подсоединены к первым перемножителям, определяющим длину транспортного средства, один из выходов каждого из первых перемножителей соединен с соответствующим входом каждого из вторых перемножителей, другие входы которых соединены с выходами устройств определения мощности аномального сигнала, а каждый из входов последних подсоединен к выходу соответствующего фильтра нижних частот, первые выходы вторых перемножителей соединены с первыми входами устройств оперативной памяти (УОП) и с входами счетчиков числа проходящих по каждой полосе транспортных средств, выходы которых подсоединены ко вторым входам УОП, одним из выходов соединенных с классификатором, по третьим и четвертым входам УОП подсоединены соответственно ко вторым выходам первых перемножителей и вторым выходам устройств вычисления скорости для контролируемых полос, а выходы классификатора и вторые выходы УОП подсоединены к устройству долговременной памяти и к цифровому индикатору.
| Устройство для перекрытия ствола скважины | 1980 |
|
SU945381A1 |
| US 3140485 А, 07.07.1964 | |||
| RU 93038532 А, 27.02.1996 | |||
| Телевизионное устройство для контроля движения транспортных средств | 1983 |
|
SU1235002A1 |

