Предлагаемое изобретение относится к области неразрушающего контроля качества изделий и предназначено для дефектоскопии стальных канатов.
Известен магнитный дефектоскоп стальных канатов, содержащий намагничивающий узел с полюсами, обращенными к зоне контроля, последовательно соединенные блок измерительных магниточувствительных элементов и блок обработки сигналов, а также датчик дистанции перемещения контролируемого каната [1]. В известном дефектоскопе датчик дистанции перемещения контролируемого каната содержит выполненное с возможностью вращения колесо, предназначенное для механического контакта с поверхностью контролируемого каната, а также преобразователь угла поворота колеса в пропорциональный ему выходной сигнал датчика.
Недостаток известного дефектоскопа состоит в погрешности определения координат выявленных дефектных участков, связанной с возможным проскальзыванием и даже остановкой колеса из-за наличия на поверхности каната смазки, грязи, воды.
Наиболее близок к предложенному, принятый за прототип, магнитный дефектоскоп стальных канатов, содержащий канал для прохождения контролируемого каната, намагничивающий узел с магнитными полюсами, обращенными к каналу, блок измерительных магниточувствительных элементов, блок обработки сигналов, подключенный своим входом к выходу блока магниточувствительных элементов, а также датчик дистанции перемещения контролируемого каната, расположенный между полюсами намагничивающего узла [2].
Однако и этот дефектоскоп обладает высокой погрешностью определения координат выявленных дефектных участков, так как и в нем используется датчик с колесом, предназначенным для механического контакта с контролируемым канатом.
Цель изобретения - повышение точности определения координат дефектов, выявленных при дефектоскопии стальных канатов.
Поставленная цель в магнитном дефектоскопе стальных канатов, содержащем канал для прохождения контролируемого каната, намагничивающий узел с магнитными полюсами, обращенными к каналу, блок измерительных магниточувствительных элементов, расположенный между магнитными полюсами, блок обработки сигналов, подключенный своим входом к выходу блока измерительных магниточувствительных элементов, блок обработки магнитограмм, подключенный своим входом к выходу блока обработки сигналов, достигается тем, что, он снабжен двумя дополнительными идентичными магниточувствительными элементами, размещенными между магнитными полюсами намагничивающего узла на поверхности канала на одной линии, параллельной оси канала, на заданном расстоянии друг от друга, двумя идентичными управляемыми блоками регистрации магнитограмм, подключенными каждый своим информационным входом к одному из дополнительных магниточувствительных элементов, генератором импульсов с заданной стабильной частотой, блок обработки сигналов и блоки регистрации магнитограмм выполнены управляемыми, блок обработки магнитограмм и представления информации выполнен с двумя дополнительными входами, подключенными соответственно к выходам блоков регистрации магнитограмм, а управляющие входы блока обработки сигналов и блоков регистрации магнитограмм подключены к генератору импульсов.
Проведенные заявителем патентно-литературные исследования не выявили технических решений с существенными признаками, идентичными или эквивалентными отличительным признакам заявляемого объекта.
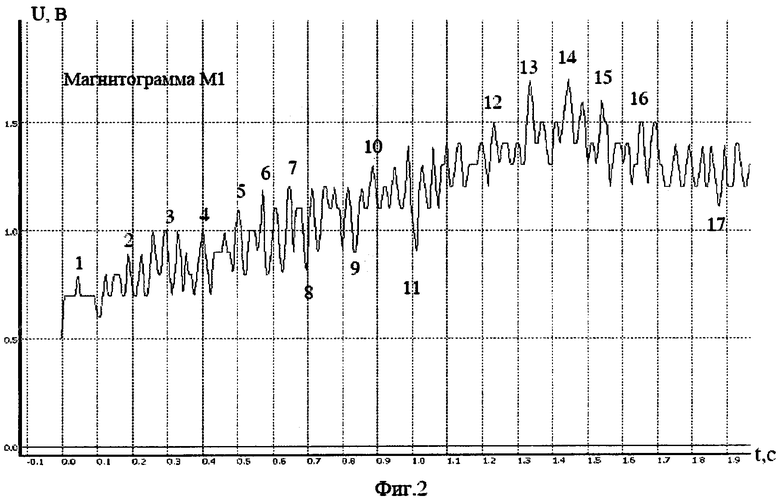
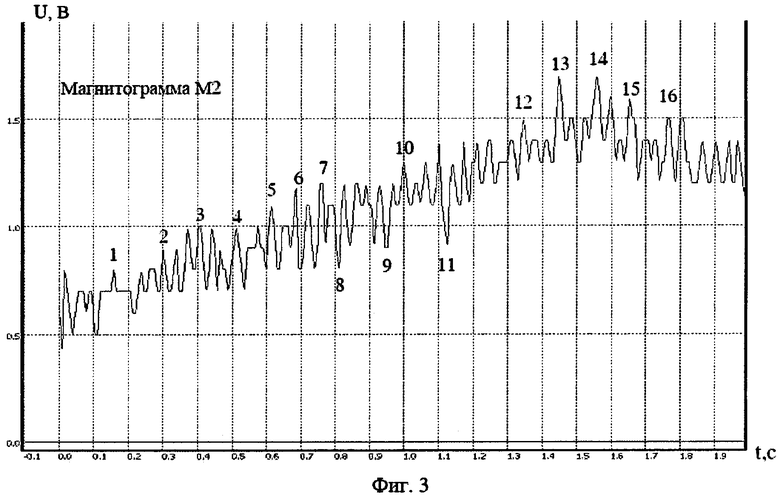
На фиг.1 представлена структурная схема заявляемого дефектоскопа; на фиг.2 и фиг.3 приведены примеры магнитограмм, полученных с помощью идентичных, смещенных вдоль оси канала дефектоскопа двух магниточувствительных элементов.
Магнитный дефектоскоп стальных канатов содержит канал 1 для прохождения контролируемого каната 2, намагничивающий узел 3 с магнитными полюсами 4 и 5, обращенными к каналу 1, блок 6 измерительных магниточувствительных элементов, управляемый блок 7 обработки сигналов, подключенный своим информационным входом к выходу блока 6 магниточувствительных элементов. Кроме того, заявляемый дефектоскоп содержит два дополнительных магниточувствительных элемента 8 и 9, размещенных между магнитными полюсами 4 и 5 на поверхности канала 1 на одной линии 10, параллельной оси канала 1, на заданном расстоянии В друг от друга, два идентичных управляемых блока 11 и 12 регистрации магнитограмм, подключенных каждый своим информационным входом к одному из дополнительных магниточувствительных элементов 8 и 9, блок 13 обработки магнитограмм, к основному входу которого подключен выход блока 7 обработки сигналов, а к двум дополнительным входам - выходы блоков 11 и 12 регистрации магнитограмм, а также генератор 14 импульсов, подключенный к управляющим входам блока 7 обработки сигналов и блоков 11 и 12 регистрации магнитограмм.
Магниточувствительные элементы 8 и 9 рекомендуется выполнять в виде датчиков Холла. Рекомендуемое расстояние В между ними - (1…2)D, где D - внутренний диаметр канала 1. Магниточувствительные элементы 8 и 9 могут быть расположены как по одну, так и по разные стороны относительно блока 6 измерительных магниточувствительных элементов. Рекомендуемая частота следования импульсов генератора - 1…5 кГц при скорости перемещения каната 0,1…5 м/с.
Заявляемый дефектоскоп работает следующим образом. Контролируемый канат 2 перемещается в канале 1 с помощью соответствующего устройства (не показано) вдоль его оси.
Намагничивающий узел 3 создает магнитный поток, частично замыкающийся по участку каната 2, находящемуся в канале 1. Дефекты каната 2 в зоне контроля между полюсами 4 и 5 вызывают над поверхностью движущегося каната локальные магнитные поля рассеяния, преобразуемые блоком 6 измерительных магниточувствительных элементов в электрические сигналы. Эти же магнитные поля рассеяния от дефектов, а также от структурных и геометрических неоднородностей каната (которые всегда имеются), обнаруживаются последовательно во времени магниточувствительными элементами 8 и 9 и преобразуются в идентичные друг другу по форме и величине электрические сигналы на выходах этих двух элементов.
С генератора 14 импульсов на управляющие входы блоков 7, 11 и 12 одновременно подаются управляющие импульсы с заданной частотой.
В момент прихода этих импульсов мгновенные значения сигналов с блока измерительных магниточувствительных элементов 6 фиксируются в памяти блока 7 обработки сигналов, а с магниточувствительных элементов 8 и 9 - в памяти блоков 11 и 12 регистрации магнитограмм.
В результате проведенного контроля каната в блоке 7 обработки сигналов формируется дефектограмма каната, а в блоках 11 и 12 регистрации магнитограмм формируются магнитограммы M1 и М2. Дефектограмма и магнитограммы формируются как зависимости соответствующих сигналов от текущей временной координаты, определяемой количеством импульсов генератора 14.
Магнитограммы M1 и М2 передаются в блок 13 обработки магнитограмм. Реальный пример таких магнитограмм M1 и М2 с участка каната на задаваемом в блоке 13 временном интервале приведен на фиг.2 и фиг.3. На обоих графиках есть зона, общая для обеих магнитограмм. В этой общей зоне содержатся идентичные по форме и величине сигналы, например, экстремумы (помечены цифрами), вызванные прохождением одних и тех же структурных неоднородностей или дефектов каната сначала под магниточувствительным элементом 8, а затем - под магниточувствительным элементом 9. В блоке 13 обработки магнитограмм происходит совместная обработка этих двух магнитограмм, основанная, например, на корреляционном анализе. На обеих магнитограммах выявляются и фиксируются идентичные по форме и величине сигналы (на фиг.2 и фиг.3 отмечены одинаковыми цифрами). Выявляются и фиксируются n таких сигналов. Чем больше число n, тем точнее будет определена длина проконтролированного участка каната и координата каждого выявленного дефекта.
Фиксируется время tn появления каждого такого сигнала на магнитограмме M1 и сдвиг по времени Δtn появления соответствующего сигнала на магнитограмме М2. Определяются значения мгновенных скоростей Vn, с которыми канат двигался относительно дефектоскопа в каждый момент tn: Vn=В/Δtn.
Определяется зависимость скорости движения каната от времени записи магнитограмм: V=f(t).
Координата L в метрах любой точки на магнитограмме, а, следовательно, и на дефектограмме, поступившей с блока обработки сигналов 7 на основной вход блока обработки магнитограмм 13, определяется как

Дефектограмма каната, оцифрованная в единицах длины, регистрируется в памяти блока 13 обработки магнитограмм и визуализируется на дисплее (мониторе).
Заявляемый дефектоскоп, по сравнению с известными, обеспечивает большую надежность в работе, более точное определение длины проконтролированного участка каната и координат выявленных дефектов. Повышение надежности и точности достигается за счет бесконтактного определения дистанции перемещения контролируемого каната.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент США №4659991, НКИ 324/241, МПК G01N 27/82;
2. Дефектоскоп для неподвижных стальных канатов. Патент РФ №2313084 МПК G01N 27/82 (прототип);
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ КАНАТА И АВТОМАТИЗИРОВАННЫЙ ДЕФЕКТОСКОП ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2589496C1 |
| ДЕФЕКТОСКОП СТАЛЬНЫХ ПРЯДНЫХ КАНАТОВ | 2011 |
|
RU2484456C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ ПО МЕТАЛЛУ, ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ, ИЗМЕРЕНИЯ ШАГА СВИВКИ ПРЯДЕЙ, КООРДИНАТЫ ВДОЛЬ ОСИ КАНАТОВ ИЗ СТАЛЬНОЙ ФЕРРОМАГНИТНОЙ ПРОВОЛОКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2460995C2 |
| СПОСОБ КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО МЕТАЛЛИЧЕСКОГО СЕЧЕНИЯ СТАЛЬНОГО КАНАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293313C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ ПОДОШВЫ РЕЛЬСОВ | 2020 |
|
RU2736177C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634366C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВНУТРЕННЕЙ КОРРОЗИИ СТАЛЬНЫХ КАНАТОВ | 2002 |
|
RU2224265C2 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ СИГНАЛОВ С ВЫБОРОЧНОЙ ПЕРЕЗАПИСЬЮ | 1992 |
|
RU2029389C1 |
Изобретение относится к области неразрушающего контроля качества стальных канатов. Сущность: канат 2 перемещается в канале 1, намагничивающий узел 3 создает магнитный поток, частично замыкающийся по участку каната 2. Локальные магнитные поля рассеяния от дефектов каната 2 преобразуются блоком 6 измерительных магниточувствительных элементов в электрические сигналы. Эти же магнитные поля рассеяния от дефектов, а также от структурных и геометрических неоднородностей каната обнаруживаются последовательно во времени магниточувствительными элементами 8 и 9 и преобразуются в идентичные друг другу по форме и величине электрические сигналы на выходах этих элементов. С генератора 14 импульсов на управляющие входы блоков 7, 11 и 12 одновременно подаются управляющие импульсы с заданной частотой. В момент прихода этих импульсов мгновенные значения сигналов с блока измерительных магниточувствительных элементов 6 фиксируются в памяти блока 7 обработки сигналов, а с магниточувствительных элементов 8 и 9 - в памяти блоков 11 и 12 регистрации магнитограмм. В результате в блоке 7 формируется дефектограмма каната, а в блоках 11 и 12 формируются магнитограммы M1 и М2. В блоке 13 обработки магнитограмм происходит совместная обработка магнитограмм M1 и М2, что позволяет разметить в единицах длины координату для полученной в процессе контроля дефектограммы. Технический результат: повышение точности определения координат дефектов. 3 ил.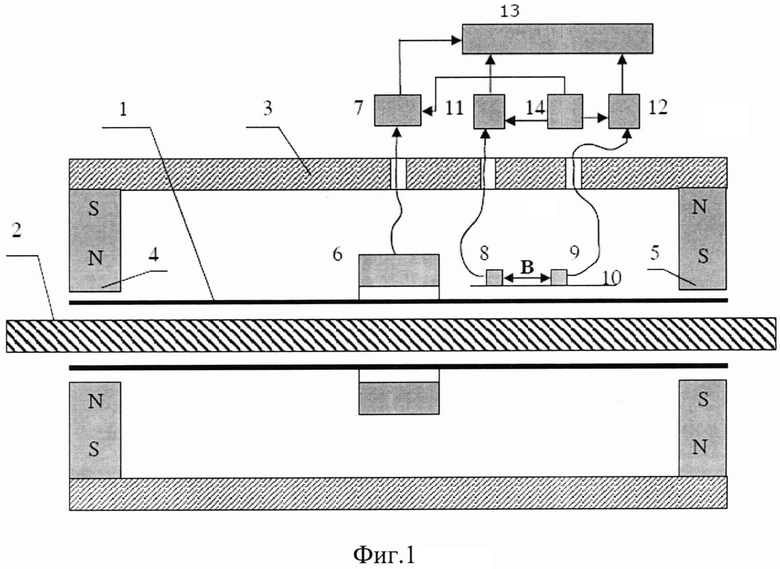
Магнитный дефектоскоп стальных канатов, содержащий канал для прохождения контролируемого каната, намагничивающий узел с магнитными полюсами, обращенными к каналу, блок измерительных магниточувствительных элементов, расположенный между магнитными полюсами, блок обработки сигналов, подключенный своим входом к выходу блока измерительных магниточувствительных элементов, блок обработки магнитограмм, подключенный своим входом к выходу блока обработки сигналов, отличающийся тем, что он снабжен двумя дополнительными идентичными магниточувствительными элементами, размещенными между магнитными полюсами намагничивающего узла на поверхности канала на одной линии, параллельной оси канала, на заданном расстоянии друг от друга, двумя идентичными управляемыми блоками регистрации магнитограмм, подключенными каждый своим информационным входом к одному из дополнительных магниточувствительных элементов, генератором импульсов с заданной стабильной частотой, при этом блок обработки сигналов и блоки регистрации магнитограмм выполнены управляемыми, блок обработки магнитограмм выполнен с двумя дополнительными входами, подключенными соответственно к выходам блоков регистрации магнитограмм, а управляющие входы блока обработки сигналов и блоков регистрации магнитограмм подключены к генератору импульсов.
| Клавиатурный манипулятор к аппарату Морзе | 1924 |
|
SU8806A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| Устройство автоматического контроля износа стальных канатов шахтных подъемных машин | 1988 |
|
SU1552086A1 |
| Устройство для создания пульсирующей струи жидкости | 1957 |
|
SU121084A1 |
| EP 845672 A1, 03.06.1998 | |||
| WO 2007012685 A3, 01.02.2007. | |||

