Изобретение относится к области неразрушающего контроля качества изделий, в частности к средствам магнитного контроля протяженных ферромагнитных объектов, и предназначено, прежде всего, для дефектоскопического контроля канатов из стальной ферромагнитной проволоки.
Уровень техники в области неразрушающего магнитного контроля подобных объектов может быть представлен следующими известными решениями.
Известен способ неразрушающего магнитного контроля протяженных ферромагнитных изделий, а именно измерения потери сечения в результате износа и обнаружения локальных дефектов, в частности, стальных канатов (см. патент США 4659991, НКИ 324/241, МПК G 01 N 27/82). Согласно этому способу участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению, и с помощью катушек, расположенных в межполюсном пространстве в зоне основного намагничивающего потока, определяют электродвижущую силу (эдс), возникающую при движении контролируемого объекта относительно катушки. Из этого сигнала выделяют информацию о потере сечения и наличии локального дефекта.
Описанное там же устройство содержит намагничивающий узел в виде постоянных магнитов с полюсами, обращенными к контролируемому объекту, и измерительный узел в виде пары катушек, расположенных в поперечной по отношению к оси объекта плоскости симметрично относительно этой оси. Каждая катушка установлена между полюсами, охватывая магнитопровод намагничивающего узла так, что ее витки расположены вблизи поверхности контролируемого объекта.
К недостаткам известного способа и реализующего его устройства следует отнести невысокую точность измерения, вызванную тем, что изменение магнитного поля вследствие потери сечения и/или появления локального дефекта, на которое катушка реагирует изменением эдс, происходит на фоне довольно высокого начального уровня сигнала. Количественная оценка такого относительно небольшого изменения сигнала оказывается недостаточно точной. Кроме того, изменения магнитного потока вследствие изменения температуры, вибраций контролируемого объекта и т.п. соизмеримы с изменениями вследствие потери сечения и устранить их при данном способе контроля довольно сложно, поскольку вычитание сигналов этих катушек для устранения, например, температурный погрешности приведет практически к потере чувствительности к локальным дефектам и изменению сечения.
К недостаткам следует отнести и то, что способ и устройство предполагают использование катушечных датчиков, сигналы которых сильно зависят от скорости перемещения контролируемого объекта, что приводит к дополнительной погрешности, а при неподвижном объекте контроль вообще невозможен.
Известен также способ неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, например, стальных проволочных канатов (заявка DE 19601707 A1, ФРГ, МПК G 01 N 27/83), при котором участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению, с помощью намагничивающего узла с полюсами, обращенными к контролируемому объекту. С помощью датчиков Холла измеряют индукцию магнитного поля под полюсами намагничивающего узла и по результату измерения поля под полюсами судят о площади поперечного сечения. Для получения информации о локальных дефектах измеряют магнитную индукцию в середине межполюсного пространства у поверхности контролируемого объекта. При отсутствии дефекта магнитное поле рассеяния остается однородным в зоне измерения, и сигнал датчиков минимален. Наличие локального дефекта нарушает однородность поля рассеяния у поверхности контролируемого объекта, вызывает поток рассеяния от дефекта и соответственно увеличение магнитной индукции поля рассеяния в зоне установки магниточувствительного датчика.
Этот способ реализован в известном устройстве неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, например, стальных канатов (см. ту же заявку DE 19601707 А1). Устройство содержит намагничивающий узел в виде магнитопровода с расположенными на его концах магнитными полюсами, обращенными к каналу для прохождения контролируемого объекта, и расположенный между полюсами измерительный узел. Измерительный узел выполнен в виде магнитопровода Ш-образного сечения, на среднем участке которого в зазоре установлен магниточувствительный датчик - датчик Холла. По сигналу магниточувствительного датчика измерительного узла судят о наличии локального дефекта. Для получения информации о площади поперечного сечения магниточувствительные датчики установлены под полюсами намагничивающего узла. Выходы магниточувствительных датчиков подключены к блоку обработки сигналов датчиков.
Описанные в упомянутой заявке ФРГ способ и устройство неразрушающего контроля являются наиболее близкими к предлагаемому решению.
Хотя приведенные способ и устройство позволяют отказаться от катушечных датчиков и тем самым избавиться от погрешности, вызванной непостоянством скорости перемещения объекта, другие недостатки предыдущего решения сохраняются.
Измерение потери сечения ведется при высоком начальном уровне сигнала и изменение сигнала при потере сечения составляет малую долю этого уровня, поскольку магнитная индукция в зазоре между полюсами и контролируемым объектом довольно слабо зависит от сечения объекта. Это объясняется тем, что при использовании современных постоянных магнитов высокой энергии магнитный поток через упомянутые зазоры зависит, в основном, от этой энергии. Магнитная индукция, как плотность магнитного потока, изменяется в зазорах при изменении сечения объекта только за счет перераспределения составляющих потока: основного намагничивающего потока через объект контроля и потока рассеяния в межполюсном пространстве намагничивающего узла. При этом основной поток изменяется в наименьшей степени, поэтому магнитная индукция в зазорах, а следовательно, и выходной сигнал датчиков изменяются тоже в незначительной степени. В результате возникают погрешности от измерения малых относительных изменений сигнала при высоком начальном уровне. При этом значительной оказывается температурная погрешность.
Кроме того, устройство-прототип имеет недостаточную достоверность обнаружения локальных дефектов, что вызвано формой сечения магнитопровода и расположением магниточувствительного датчика в зазоре средней его части. При попадании дефекта в зону чувствительности датчика поток рассеяния, вызванный дефектом и захваченный магнитопроводом измерительного узла, разделяется на две части. Одна проходит через зазор с датчиком Холла, а другая - через магнитопровод, минуя датчик. Из-за этого приращеие магнитной индукции, вызванное дефектом, в месте расположения датчика Холла уменьшается, следовательно, уменьшается и сигнал от дефекта, и отношение сигнал/помеха, и достоверность обнаружения дефекта.
Техническая задача, решаемая изобретением, состоит в повышении точности измерения площади поперечного сечения и повышении достоверности обнаружения локальных дефектов.
Для решения этой технической задачи в предлагаемом способе, как и в известном, участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению, с помощью намагничивающего узла с полюсами, обращенными к оси контролируемого объекта, и в межполюсном пространстве у поверхности контролируемого объекта производят измерение параметра магнитного поля, например, магнитной индукции. В отличие от прототипа измерение параметра магнитного поля производят, по крайней мере, в одной паре точек, лежащих на линии, параллельной оси контролируемого объекта, сигналы о результатах измерения в этих точках вычитают один из другого и по полученной разности сигналов (далее называемой первой разностью) судят о наличии дефекта. Для получения информации о площади поперечного сечения сигналы о результатах измерения в этих точках суммируют.
При этом наилучший результат имеет место, когда измерение параметра магнитного поля производят в точках, симметричных относительно середины межполюсного пространства намагничивающего узла.
Для дальнейшего повышения точности контроля потери сечения за счет уменьшения погрешности от других факторов, влияющих на магнитную индукцию, например, за счет уменьшения температурной погрешности, дополнительно измеряют параметр магнитного поля, по крайней мере, под одним из полюсов намагничивающего узла и определяют вторую разность сигналов - между суммой сигналов о параметре магнитного поля в упомянутой паре точек и результатом измерения, по крайней мере, под одним из полюсов намагничивающего узла, умноженным на весовой коэффициент, значение которого постоянно для данного номинального значения площади поперечного сечения контролируемого объекта.
При этом весовой коэффициент может быть установлен путем изменения его значения до получения минимального значения второй разности сигналов при нахождении под намагничивающим узлом участка контролируемого объекта с номинальным значением площади поперечного сечения.
Вышеуказанный способ может быть осуществлен, в частности, с помощью предлагаемого устройства неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, которое, как и известное устройство-прототип, содержит намагничивающий узел в виде магнитопровода с расположенными на его концах магнитными полюсами, обращенными к каналу для прохождения контролируемого объекта, измерительный узел в виде расположенного между полюсами намагничивающего узла магнитопровода и магниточувствительных датчиков и блок обработки сигналов магниточувствительных датчиков. В отличие от прототипа в нем магнитопровод измерительного узла выполнен состоящим из трех элементов, расположенных вдоль оси канала для прохождения контролируемого объекта, из которых два крайних одинаковы и установлены симметрично и с зазором относительно среднего элемента, а магниточувствительные датчики измерительного узла установлены попарно на линии, параллельной оси канала, для прохлждения контролируемого объекта в зазорах между средним и крайними элементами магнитопровода измерительного узла.
При этом целесообразно выполнение, при котором элементы магнитопровода измерительного узла снабжены сменными ферромагнитными вставками, установленными с их внутренней стороны. Это позволит с помощью одного и того же устройства контролировать объекты с разными номинальными размерами поперечного сечения без снижения точности контроля.
С той же целью целесообразно выполнение полюсов намагничивающего узла со сменными ферромагнитными вставками на внутренней, т.е. обращенной к каналу для прохождения контролируемого объекта стороне.
Устройство может быть снабжено, по крайней мере, одним дополнительным магниточувствительным датчиком, установленным под полюсом намагничивающего узда. Это позволит снизить погрешность от случайных факторов, влияющих на параметры магнитного поля, например температуры.
Когда намагничивающий и измерительный узлы выполнены симметричными относительно оси канала для прохождения контролируемого объекта, целесообразно выполнение намагничивающего и измерительного узлов разъемными по плоскости симметрии. Такое выполнение упрощает установку устройства на контролируемый объект при смене объекта.
Предложенный способ и устройство для его осуществления более подробно раскрываются приведенными ниже примерами, которые, однако, не исчерпывают всех возможных вариантов реализации.
Изобретение иллюстрируется чертежами, где изображены:
на фиг. 1 - схема размещения намагничивающего узла и магниточувствительных датчиков, а также распределение магнитных потоков:
а) - при однородном контролируемом объекте, без локальных дефектов,
б) - при наличии локального дефекта в контролируемом объекте;
на фиг. 2 - предложенное устройство при цилиндрическом исполнении магнитопровода намагничивающего и измерительного узлов:
а) - продольный разрез,
б) - поперечные разрезы;
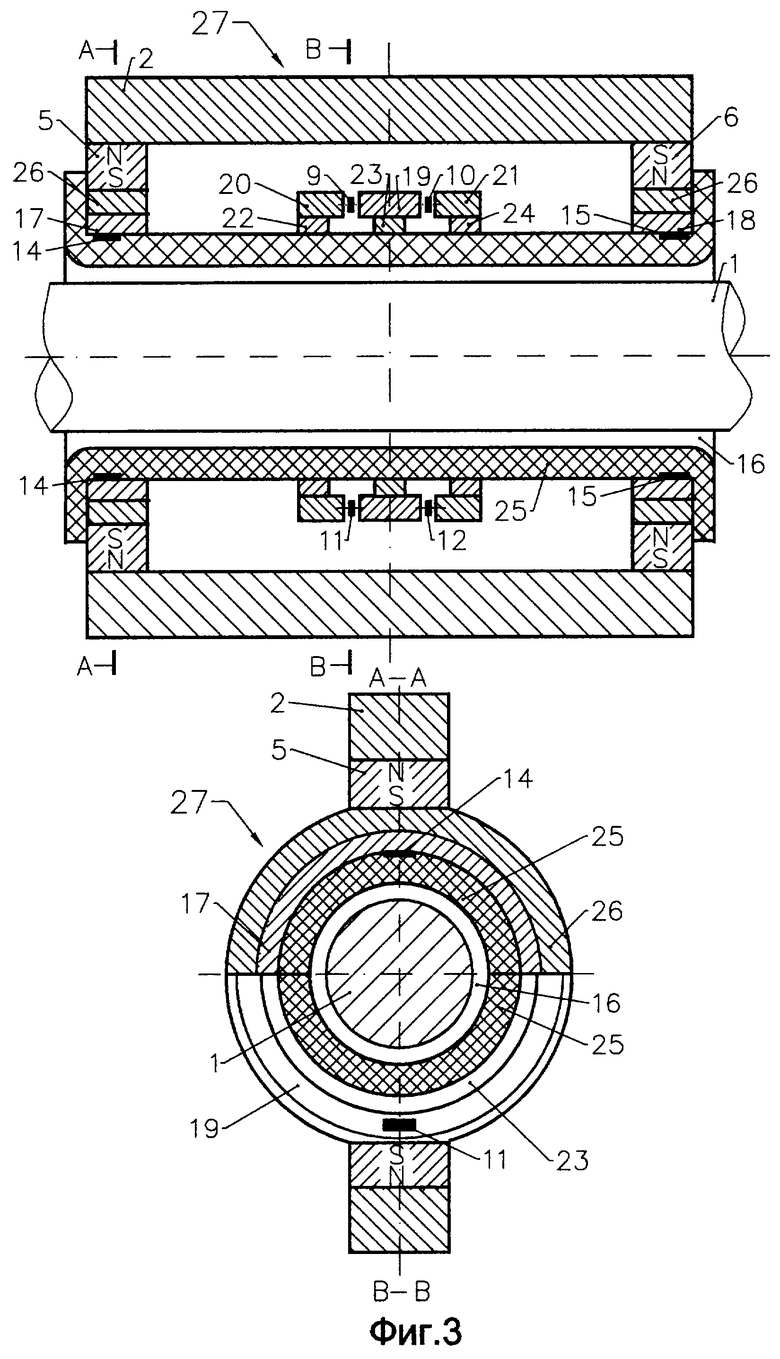
на фиг. 3 - предложенное устройство при П-образном магнитопроводе намагничивающего и измерительного узла:
а) - продольный разрез,
б) - поперечные разрезы;
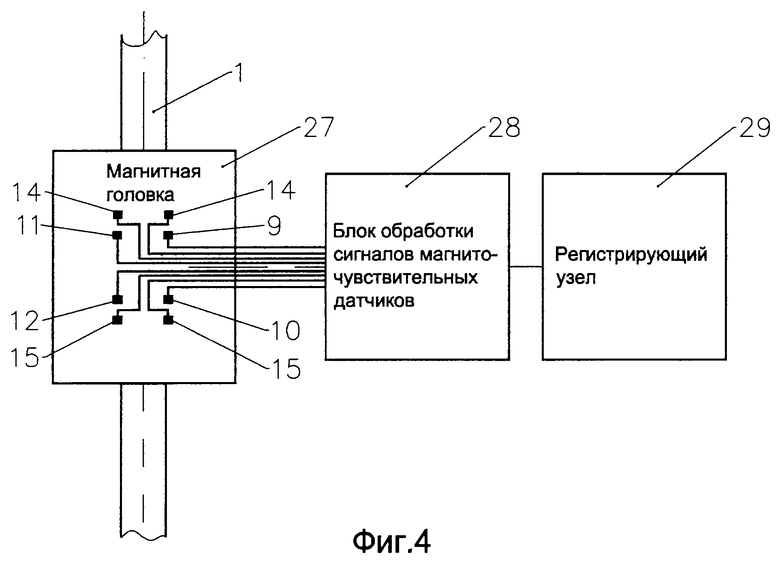
на фиг.4 - структурная схема предложенного устройства;
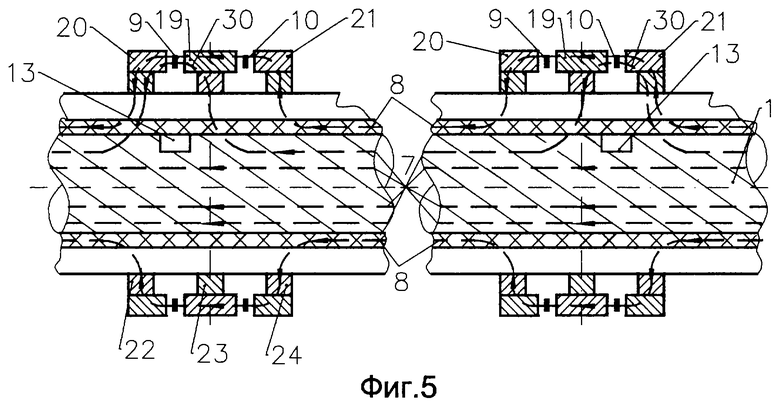
на фиг. 5 - распределение магнитного потока рассеяния по магнитопроводу измерительного узла при обрыве проводок контролируемого каната.
Предлагаемый способ контроля заключается в следующем.
Участок контролируемого объекта 1 (см. фиг.1) намагничивают вдоль его оси до состояния, близкого к насыщению, для чего создают магнитный поток с помощью намагничивающего узла, имеющего магнитопровод 2 с полюсами 3, 4 на концах, обращенными к контролируемому объекту 1 и расположенными вблизи его поверхности. Полюса 3 и 4 образованы постоянными магнитами 5 и 6, как это изображено на фиг.1, но могут быть образованы и полюсными башмаками, охватывающими контролируемый объект 1. Магнитный поток может быть создан и с помощью электромагнитов.
Большая часть созданного магнитного потока замыкается через контролируемый объект 1 и образует основной поток 7, а часть потока проходит по воздуху в межполюсном пространстве, т.е. между полюсами 3 и 4, и образует поток рассеяния 8. В межполюсном пространстве поле рассеяния 8 наиболее однородно в средней части.
С помощью магниточувствительных датчиков 9 и 10 в межполюсном пространстве вблизи поверхности контролируемого объекта 1 измеряют параметр магнитного поля в двух точках, лежащих на одной линии, параллельной оси объекта 1. Поскольку наибольшая однородность поля рассеяния 8 имеет место в середине пространства между полюсами 3 и 4, то измерение параметра магнитного поля наиболее целесообразно в точках, симметричных относительно середины межполюсного пространства.
Как правило, измеряемым параметром магнитного поля является магнитная индукция, поскольку большинство типов магниточувствительных датчиков, используемых для измерения, реагируют на изменение магнитной индукции при изменении магнитного поля.
Для измерения параметров магнитного потока целесообразно при этом в качестве магниточувствительных использовать датчики Холла. При симметричном относительно оси объекта 1 исполнении намагничивающего узла измерение магнитной индукции поля рассеяния 8 целесообразно проводить с помощью такой же пары магниточувствительных датчиков 11, 12 по другую сторону контролируемого объекта 1. Вокруг контролируемого объекта 1 могут быть установлены несколько таких пар датчиков 9-10, 11-12 и т.п.
Для обнаружения локальных дефектов контролируемого объекта 1 сигналы датчиков 9 и 10 ( 11 и 12) вычитают и по полученной разности, далее называемой первой разностью сигналов, судят о наличии дефекта.
При отсутствии локальных дефектов (фиг.1а) поле рассеяния 8 в продольном направлении однородно в средней части межполюсного пространства, и разность сигналов магниточувствительных датчиков 9 и 10 (11 и 12) практически равна нулю. Если участок контролируемого объекта 1 содержит дефект 13, например обрывы проволок (фиг.16), то вблизи него в окружающем пространстве возникают локальные магнитные поля рассеяния и однородность магнитного поля в пределах этих зон чувствительности нарушается. Следовательно, первые разности сигналов пар датчиков 9 и 10 (11 и 12) становятся отличными от нуля, и принимается решение о наличии локального дефекта, например обрыва проволоки.
При неизбежных в процессе контроля радиальных перемещениях контролируемого объекта 1, например, из-за вибрации, однородность поля рассеяния 8 в пределах упомянутых зон не нарушается, даже если значения магнитной индукции в окружающей объект 1 области несколько изменяются.
Сигналы датчиков 9 и 10 (11, 12) зависят как от наличия локальных дефектов, так и от площади поперечного сечения контролируемого объекта 1. Для получения информации о площади сечения контролируемого объекта 1 сигналы датчиков 9 и 10, 11 и 12 суммируют.
Изменение площади поперечного сечения контролируемого объекта 1, доведенного намагничивающим узлом до состояния, близкого к магнитному насыщению, вызывает перераспределение магнитных потоков в объекте 1 и окружающей его области. В частности, уменьшение площади сечения (потеря сечения) приводит к увеличению магнитного потока рассеяния 8 в межполюсном пространстве, следовательно, к увеличению магнитной индукции в упомянутой области. Поскольку поток рассеяния 8 значительно меньше основного потока 7, то при перераспределении потоков относительное увеличение потока рассеяния 8 оказывается значительно больше относительного уменьшения основного потока 7.
Следовательно, относительное изменение магнитной индукции в окружающей объект 1 области межполюсного пространства (поля рассеяния 8) значительно больше, чем в зазорах между полюсами 3 и 4 и контролируемым объектом 1. Этим достигают повышения точности измерения потери сечения по сравнению с прототипом, в котором потерю сечения измеряют по изменению сигналов датчиков, расположенных в зазорах между полюсами 3, 4 намагничивающего узла и объекта 1, т.е. в зоне основного потока.
Площадь поперечного сечения определяют по сумме сигналов пар датчиков 9-12, зная номинальное значение упомянутой площади и соответствующее ему значение суммы сигналов пар датчиков. Суммированием достигают дополнительного повышения точности измерения площади поперечного сечения, поскольку чувствительность канала измерения потери сечения возрастает при неизменном коэффициенте передачи электронных цепей этого канала. Следовательно, погрешности измерения, возникающие из-за нестабильности коэффициента передачи канала, не изменяются, отношение сигнал/помеха возрастает, благодаря чему и достигают увеличения точности измерения.
Для дальнейшего повышения точности измерения площади поперечного сечения с помощью датчиков Холла 14, (15) дополнительно измеряют магнитную индукцию, по крайней мере, под одним из полюсов 3, (4).
Сигнал дополнительного магниточувствительного датчика 14, (15), взятый с весовым коэффициентом А, который постоянен при контроле объектов с одинаковым номинальным сечением, вычитают из суммы сигналов пар датчиков 9-10, 11-12, расположенных в зоне поля рассеяния 8, и получают вторую разность сигналов, по которой измеряют площадь поперечного сечения контролируемого объекта 1. Этим достигают еще более высокой точности измерения, поскольку уменьшается погрешность измерения, связанная с нестабильностью магнитной индукции вокруг контролируемого объекта 1, например, из-за влияния изменений температуры на намагничивающий узел.
При изменении температуры намагничивающего узла изменяется создаваемый им магнитный поток, что приводит к изменению потока рассеяния 8 и магнитной индукции, на которую реагируют датчики 9-12. Вместе с тем в ту же сторону изменяется основной магнитный поток 7 и магнитная индукция под полюсами 3,4 намагничивающего узла. Поэтому вторая разность сигналов изменяется незначительно при изменении магнитного потока намагничивающего узла, что повышает точность измерения площади поперечного сечения объекта 1.
Для задания весового коэффициента А намагничивающий узел и магниточувствительные датчики 9-10, 11-12, 14, 15 устанавливают на участок объекта 1 с номинальной площадью поперечного сечения и изменяют значение коэффициента А так, чтобы достичь минимального значения второй разности сигналов, чем достигают еще большей точности измерения. Действительно, в этом случае вторая разность сигналов датчиков прямо пропорциональна изменению площади поперечного сечения относительно номинального значения. При неразрушающем контроле стальных канатов необходимо измерять малые изменения площади их поперечного сечения (порядка одного процента от номинального значения). Измерение малых изменений сигналов датчиков относительно уровня, близкого к нулю, позволяет достигнуть более высокой точности, чем то же измерение относительно значительного начального уровня.
Таким образом, изобретение - способ обеспечивает более высокую точность как при контроле площади поперечного сечения, так и при обнаружении локальных дефектов.
Наилучшим образом способ раскрывается в предлагаемом устройстве неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов.
Устройство содержит (фиг.2) намагничивающий узел, который выполнен в виде цилиндрического магнитопровода 2, на концах которого расположены постоянные магниты 5, 6 с полюсами 3, 4, обращенными к каналу 16 для прохождения контролируемого объекта 1. Полюса 3, 4 намагничивающего узла могут быть снабжены сменными вставками 17, 18 из магнитомягкого материала, плотно прилегающими с внутренней стороны к полюсам 3, 4.
Между полюсами 3,4 намагничивающего узла установлен магнитопровод измерительного узла, состоящий из трех элементов 19, 20, 21. Средний элемент 19 магнитопровода измерительного узла установлен по середине между полюсами 3 и 4. Два крайних элемента 20 и 21 выполнены одинаковыми и установлены вдоль оси канала 16 для прохождения контролируемого объекта симметрично и с зазором относительно среднего элемента 19. В варианте, представленном на фиг.2, элементы 19, 20, 21 магнитопровода измерительного узла выполнены в виде цилиндрических колец из магнитомягкого материала. Средний элемент 19 может быть несколько смещен относительно середины межподюсного пространства, однако положение по середине является наилучшим с точки зрения точности контроля.
С внутренней стороны элементов 19, 20, 21 магнитопровода измерительного узла коаксиально установлены, плотно прилегая к ним, ферромагнитные вставки 22, 23, 24.
В зазорах между средним 19 и крайними 20 и 21 элементами магнитопровода измерительного узла установлены магниточувствительные датчики 9 и 10, образующие одну пару датчиков измерительного узла. По другую сторону от оси канала 16 для прохождения контролируемого объекта симметрично установлена другая пара магниточувствительных датчиков 11, 12 измерительного узла. Равномерно по окружности в зазорах может быть установлено несколько таких пар датчиков.
Под полюсами 3,4 намагничивающего узла может быть установлен один или несколько дополнительных магниточувствительных датчиков 14, 15.
В качестве магниточувствительных могут быть использованы разные типы датчиков (магниторезисторы, магнитотранзисторы, феррозонды и др.). Но наиболее целесообразно использование в этом качестве датчиков Холла, поскольку они обладают высокой чувствительностью к изменению магнитной индукции и стабильностью.
Под полюсами 3,4 вдоль всего намагничивающего узла размещен вкладыш 25 из неферромагнитного материала, который образует гладкий канал 16 для прохождения контролируемого объекта и предохраняет от повреждений датчики измерительного узла 9-12 и дополнительные датчики 14, 15. Вкладыш 25 ограничивает также возможные радиальные вибрации контролируемого объекта 1 внутри канала 16 и его перекосы внутри намагничивающего и измерительного узлов. Сменный неферромагнитный вкладыш 25 выполнен из неферромагнитного металла, например, латуни, чем достигается его износоустойчивость. Наилучший материал вкладышей 25 при контроле канатов из проволоки с полимерным защитным покрытием - пластмасса, например, капролон, т.к. металлические вкладыши повреждают покрытие канатов.
Ферромагнитные вставки 17, 18, 22, 23, 24 и неферромагниитный вкладыш 25 выполнены сменными и имеют несколько типоразмеров, несколько устройство предназначено для контроля канатов разного диаметра из заданного диапазона.
Устройство, изображенное на фиг.3, предназначено, главным образом, для контроля близко расположенных друг к другу канатов, например канатов лифтов. Обычное расстояние между соседними канатами лифтов составляет около 80 мм. Т.к. диаметр канатов лифтов может достигать 25-30 мм, то при диаметре каната 30 мм наружный диаметр элементов 19-21 магнитопровода измерительного узла, который примерно в полтора раза больше диаметра каната, составляет 45 мм, и для намагничивающего узла практически не остается места. Поэтому приведен вариант выполнения устройства для такого случая контроля.
Выполнение устройства по фиг. 3 аналогично описанному выше, что легко увидеть при сравнении их продольных разрезов. Отличие заключается в том, что магнитопровод 2 намагничивающего узла выполнен П-образным, а постоянные магниты 5 и 6 снабжены полюсными башмаками 26 из ферромагнитного материала, охватывающими контролируемый объект 1, а ферромагнитные вставки 17, 18 установлены плотно прилегающими к полюсным башмакам 26. Поскольку наружный диаметр полюсных башмаков 26 значительно меньше, чем высота магнитопровода 2 намагничивающего узла, то габариты устройства по одной из поперечных осей значительно меньше, чем по другой, и сужение устройства по одной из осей позволяет разместить его вокруг контролируемого объекта даже при малых расстояниях между канатами.
Для повышения удобства эксплуатации устройств на фиг.2 и 3, магнитная система которых симметрична относительно оси канала 16, намагничивающий и измерительный узлы выполнены разъемными по продольной плоскости симметрии и состоят из двух половин. Половины могут быть соединенны с одной стороны от оси канала 16 для прохождения контролируемого объекта шарнирными петлями (не показаны), а с другой стороны снабжены замком (не показан).
В обоих вариантах устройства намагничивающий и измерительный узлы составляют (фиг.4) магнитную головку 27, устанавливаемую на контролируемый объект 1.
Расположенные в магнитной головке 27 магниточувствительные датчики 9-12 измерительного и дополнительные датчики 14, 15 под полюсами 3,4 намагничивающего узла подключены к блоку 28 обработки сигналов магниточувствительных датчиков, который представляет собой, например, цифровой процессор. Выход блока обработки сигналов 28 (процессора) подключен к регистрирующему узлу 29, например принтеру, который регистрирует дефектограмму.
В дополнение к описанному выше магнитная головка 27 в любом исполнении снабжена датчиком координаты контролируемого каната 1 относительно магнитной головки 27. Упомянутый датчик предназначен для определения координат дефекта каната относительно предварительно выбранной начальной координаты. Учитывая, что конструкции таких датчиков широко известны, на чертеже упомянутый датчик не показан.
Рассмотрим работу устройства на примере контроля канатов из стальной проволоки.
Магнитную головку 27 устанавливают на контролируемый канат 1, создавая в нем продольный магнитный поток 7 с помощью намагничивающего узла, содержащего постоянные магниты 5, 6 и магнитопровод 2. Энергия магнитов 5,6 обеспечивает достижение значений магнитной индукции, достаточных для доведения материала каната на контролируемом участке до состояния, близкого к магнитному насыщению.
Основная часть 7 магнитного потока, создаваемого намагничивающим узлом, проходит через канат 1, а через межполюсное пространство вокруг каната 1 - поток рассеяния 8. Поток рассеяния 8 (или его часть) захватывается ферромагнитными элементами 19-21 магнитопровода измерительного узла, проходя сквозь пары 9-10 и 11-12 датчиков Холла.
Сигналы датчиков 9-10 и 11-12, представляющие собой при использовании датчиков Холла эдс Холла, поступают в блок 28 обработки (цифровой процессор), где обрабатываются по описанному выше способу согласно изобретению. Результаты обработки упомянутых сигналов регистрируются регистрирующим узлом 29, например, принтером в виде дефектограмм. Ось абсцисс на дефектограммах оцифрована в единицах длины, например, в метрах с помощью сигналов датчика координат. По оси ординат одной дефектограммы представляется потеря поперечного сечения каната 1 в процентах от номинального значения, по оси ординат другой дефектограммы - сигнал от обрывов проволоки каната 1.
Магнитный поток рассеяния 8, захватываемый элементами 19, 20, 21, зависит от площади сечения контролируемого каната 1, как показано выше при описании способа согласно изобретению. Поэтому сумма сигналов датчиков 9-12, входящих в пары, и других аналогичный пар датчиков, окружающих канат 1, зависит от указанной площади сечения каната 1.
Суммирование сигналов датчиков 9, 10, а также 11, 12 и других аналогичных, образующих пары, осуществляет блок 28 (цифровой процессор). После обработки суммы сигналов упомянутых пар датчиков и сигналов датчика координаты блоком 28 регистрирующий узел 29 (принтер) регистрирует дефектограмму потери сечения каната.
Поскольку поток 8 рассеяния значительно меньше основного потока 7, то при перераспределении потоков вследствие изменения сечения каната 1 относительное увеличение (в случае потери сечения) потока 8 рассеяния оказывается значительно больше относительного уменьшения основного потока. Следовательно, относительное изменение магнитной индукции в окружающей канат 1 области межполюсного пространства значительно больше, чем в зазорах между полюсами 3,4 и канатом 1, чем и достигается повышение точности измерения.
Сигнал дополнительных магниточувствительных датчиков 14 и 15, размещенных под полюсами 3, 4 намагничивающего узла, после осреднения блоком 28 обработки сигналов (процессором) вычитаются с весовым коэффициентом А из суммы сигналов пар датчиков 9-10, 11-12 и других аналогичных пар. Вычитая умноженный на весовой коэффициент А сигнал дополнительных датчиков 14,15, получают вторую разность сигналов, по которой измеряют площадь поперечного сечения каната 1. Этим достигается еще более высокая точность измерения, несколько уменьшается погрешность измерения, связанная с нестабильностью магнитной индукции от изменения температуры и других случайных факторов.
Разность сигналов датчиков 9 и 10, 11 и 12, а также других аналогичных близка к нулю, если на участке каната 1, находящемся в зоне чувствительности датчиков, локальные дефекты, например обрыв проволок, отсутствуют. Действительно, через магниточувствительные датчики 9 и 10 проходит один и тот же поток рассеяния. То же относится и к датчикам 11 и 12, а также к другим аналогичным парам. Следовательно, сумма разностей сигналов пар датчиков близка к нулю при отсутствии обрывов проволок каната 1 в зоне чувствительности датчиков 9-10, 11-12.
При попадании обрыва 13 проволоки каната 1 (см. фиг.5) в зону чувствительности датчиков, например в зону чувствительности датчика 9, локальный поток рассеяния 30 захватывается элементами 19 и 20 магнитопровода измерительного узла. В результате суммарный поток рассеяния, проходящий через датчик 9, возрастает, и разность сигналов пар датчиков 9 и 10 увеличивается.
При перемещении обрыва 13 в зону чувствительности датчика 10 возрастает поток рассеяния через этот датчик, и разность сигналов пар датчиков 9 и 10 меняет знак. В результате на выходе пары датчиков 9, 10 появляется двуполярный импульс напряжения, который после обработки блоком 28 регистрируется регистрирующим узлом 29 и может быть идентифицирован как сигнал от обрыва проволоки каната 1.
Таким образом, сигналы датчиков 9-12 зависят как от площади поперечного сечения контролируемого объекта, так и от наличия локальных дефектов. При этом сумма сигналов определяется площадью поперечного сечения в зоне чувствительности датчиков, а разность сигналов датчиков каждой пары - наличием локальных дефектов в зоне чувствительности датчиков. Следовательно, в предлагаемом устройстве реализуется предлагаемый способ.
Поскольку для измерения потери сечения каната и обнаружения в нем локальных дефектов в устройстве используются одни и те же датчики, то сигналы канала потери сечения и канала локальных дефектов появляются одновременно при попадании участка каната 1 в зону чувствительности датчиков 9-12. Сопоставление сигналов обоих упомянутых каналов обеспечивает дополнительное повышение достоверности обнаружения локальных дефектов. Кроме того, упрощается конструкция устройства, т. к. уменьшается количество необходимых магниточувствительных датчиков.
При переходе к контролю канатов меньшего поперечного сечения имеет место увеличение радиальных зазоров между элементами 19-21 магнитопровода измерительного узла и канатом и, как следствие, расширение упомянутых кольцевых зон чувствительности и их взаимное перекрытие. Это проявляется в уменьшении первой разности сигналов пар датчиков 9-10 (11-12), что приводит к снижению достоверности обнаружения локальных дефектов каната 1. Кроме того, увеличение зазоров снижает чувствительность датчиков 9-12 к локальным дефектам каната 1 и тем самым еще более снижает достоверность обнаружения локальных дефектов. Наличие сменных ферромагнитных вставок 22-24 внутри упомянутых элементов 19-21 уменьшает радиальный зазор между канатом 1 и элементами 19-21 магнитопровода измерительного узла и обеспечивает тем самым возможность получить наибольшую для данного устройства достоверность обнаружения локальных дефектов при разных номинальных размерах поперечного сечения контролируемого объекта 1.
Увеличение радиальных зазоров при переходе к контролю объекта другого номинального размера сечения имеет место и под полюсами 3,4 намагничивающего узла. Это вызывает уменьшение магнитной индукции в канате 1 и переход материала каната 1 в ненасыщенное состояние. Следовательно, нарушается линейная связь между площадью поперечного сечения каната 1 и магнитной индукцией в зоне ее измерения датчиками 14 (15), что приводит к увеличению погрешности измерения площади поперечного сечения.
Наличие сменных ферромагнитных вставок 17,18 под полюсами позволяет в заданном диапазоне контролируемых номинальных размеров поперечного сечения обеспечить зазор между полюсами 3 и 4 и канатом 1, при котором материал контролируемого каната 1 остается в состоянии, близком к насыщению, и потому погрешность измерения при переходе к контролю каната меньшего номинала поперечного сечения не увеличивается.
Т. к. расположение среднего элемента 19 в середине межполюсного пространства делает магнитную систему намагничивающего и измерительного узла симметричной, достигается дополнительное повышение точности измерения площади сечения каната, поскольку несимметрия магнитной системы приводит к дополнительной погрешности при изменении направления движения каната 1 относительно намагничивающего узла из-за гистерезисных явлений в канате 1.
Перед началом работы устройство калибруют в два этапа:
на первом этапе калибруют канал измерения потери сечения, а на втором - канал обнаружения локальных дефектов.
На первом этапе магнитную головку 27 устанавливают на отрезке каната 1 с номинальным значением площади поперечного сечения, что соответствует нулевому значению потери сечения. С помощью блока 28 (процессора) выбирают значение весового коэффициента А так, чтобы получить на регистрирующем узле 29 нулевое значение потери сечения. Затем магнитную головку 27 устанавливают на отрезке каната 1 с известным значением потери сечения и с помощью блока 28 добиваются этого значения на регистрирующем узде 29. В качестве второй калибровочной точки можно использовать 100%-ную потерю сечения, что соответствует отсутствию каната в магнитной головке. Калибровка по двум точкам позволяет получить достаточную точность измерения, т.к. зависимость сигналов при использовании датчиков Холла от потери сечения близка к линейной. При нелинейной зависимости для повышения точности измерения при калибровке надо использовать большее количество известных значений потери сечения.
На втором этапе магнитную головку 27 устанавливают на от резке каната 1 с обрывом проволок известного поперечного сечения, например, 1% от номинального значения площади сечения каната. Перемещая магнитную головку 27 вдоль отрезка каната 1, получают импульс сигнала от обрыва и с помощью блока 28 обработки сигналов добиваются требуемой для удобной регистрации величины импульса на регистрирующем узле 29.
Таким образом, благодаря предложенным способу неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов и устройству для осуществления этого способа достигнуто повышение точности измерения поперечного сечения объектов контроля, в частности стальных канатов, и повышение достоверности обнаружения локальных дефектов, например, обрывов проволок в стальных канатах.
Изобретение может быть использовано во всех областях, связанных с изготовлением и применением протяженных ферромагнитных объектов, таких как стальные прутки, трубы, проволока, канаты, причем не только круглого сечения, но и ленточного типа. Оно может быть использовано, в частности, при дефектоскопии канатов в горнорудной промышленности, на канатных дорогах, в процессе эксплуатации лифтов и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ ПО МЕТАЛЛУ, ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ, ИЗМЕРЕНИЯ ШАГА СВИВКИ ПРЯДЕЙ, КООРДИНАТЫ ВДОЛЬ ОСИ КАНАТОВ ИЗ СТАЛЬНОЙ ФЕРРОМАГНИТНОЙ ПРОВОЛОКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2460995C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ КАНАТА И АВТОМАТИЗИРОВАННЫЙ ДЕФЕКТОСКОП ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2589496C1 |
| СПОСОБ КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО МЕТАЛЛИЧЕСКОГО СЕЧЕНИЯ СТАЛЬНОГО КАНАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293313C1 |
| ПЕРВИЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАГНИТНОГО КОНТРОЛЯ НЕСУЩЕЙ АРМАТУРЫ ЛИНЕЙНО ПРОТЯЖЕННЫХ ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2020 |
|
RU2760630C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634366C2 |
| Способ контроля механических свойств металлопроката, изготовленного из ферромагнитных металлических сплавов и устройство для его осуществления | 2023 |
|
RU2807964C1 |
| Способ скоростной магнитной дефектоскопии длинномерных изделий | 2019 |
|
RU2707977C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗНОСА СТАЛЬНЫХ ПРОВОЛОЧНЫХ КАНАТОВ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2281489C2 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ ПОДОШВЫ РЕЛЬСОВ | 2020 |
|
RU2736177C1 |

Изобретение относится к области неразрушающего контроля качества изделий и предназначено, прежде всего, для дефектоскопического контроля канатов из стальной ферромагнитной проволоки. Способ включает продольное намагничивание участка контролируемого объекта до состояния, близкого к насыщению, и измерение параметра магнитного поля у поверхности объекта между полюсами намагничивающего узла, причем указанное измерение производят, по крайней мере, в одной паре точек, лежащих на линии, параллельной оси объекта. Устройство для осуществления способа содержит намагничивающий узел в виде магнитопровода с магнитными полюсами, обращенными к каналу для прохождения объекта, измерительный узел в виде расположенного между полюсами намагничивающего узла магнитопровода и магниточувствительных датчиков. Магнитопровод измерительного узла выполнен состоящим из трех элементов, расположенных вдоль оси объекта, из которых два крайних одинаковы и установлены симметрично и с зазорами относительно среднего, а магниточувствительные датчики установлены попарно на линии, параллельной оси канала, для прохождения объекта в зазорах между средним и крайними элементами магнитопровода. Способ и устройство могут быть использованы для контроля канатов из стальной проволоки и позволяют повысить точность контроля площади сечения. 2 с. и 7 з.п.ф-лы, 5 ил.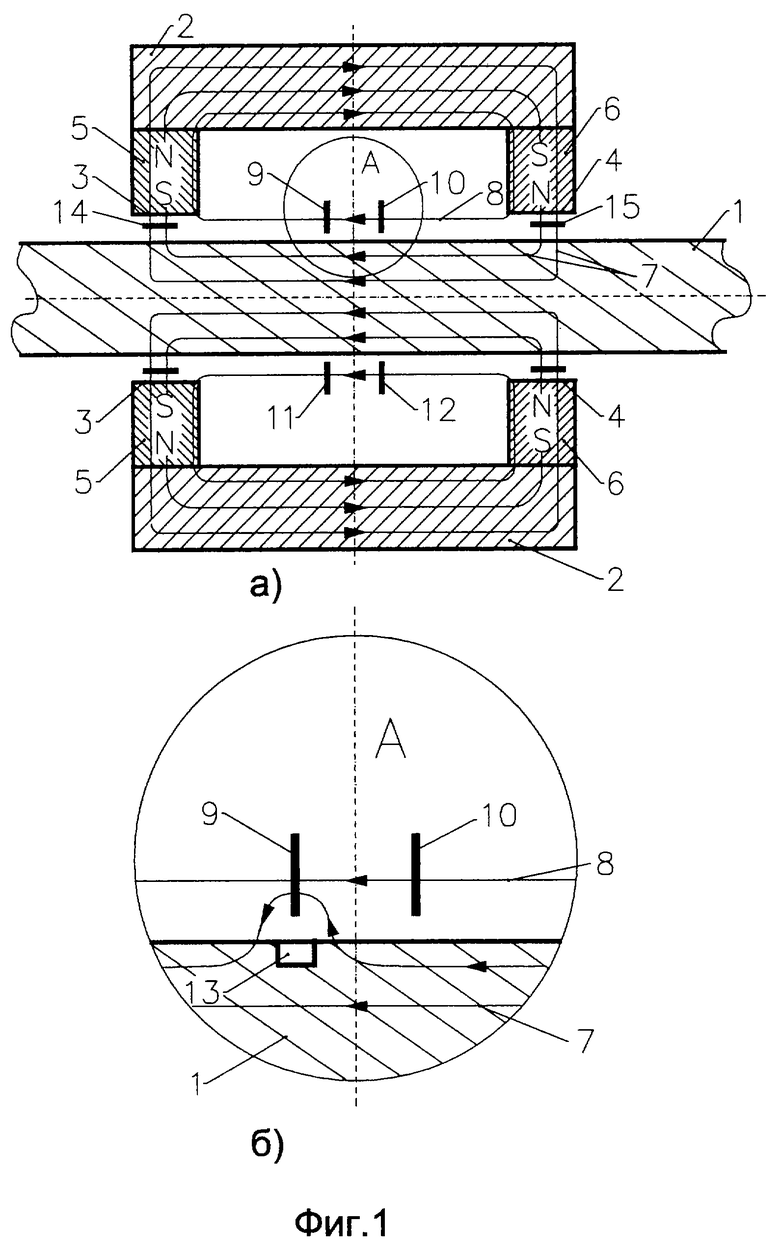
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ДВИЖУЩЕМСЯ ДЛИННОМЕРНОМ ОБЪЕКТЕ | 1992 |
|
RU2025723C1 |
| ДЕФЕКТОСКОП СТАЛЬНЫХ КАНАТОВ | 1969 |
|
SU410305A1 |
| ХОМЕРИКИ О.К | |||
| Полупроводниковые преобразователи магнитного потока | |||
| - М.: Энергоатом, 1986, с.110-115 | |||
| DE 19601707 А, 25.07.1996. | |||

