Изобретение относится к способам магнитной дефектоскопии, предназначенным для обнаружения дефектов в протяженных ферромагнитных изделиях с постоянным и сложным поперечным сечением, в частности в железнодорожных рельсах.
Реализация данного изобретения рассмотрена по отношению к магнитной дефектоскопии железнодорожных рельсов, как наиболее распространенных и ответственных изделий.
В последние годы изломы рельсов на эксплуатируемых железнодорожных линиях ОАО «РЖД» в основном происходят из-за дефектов в подошве рельса. В 2014-2019 годах на сети дорог до 80% изломов рельсов произошли из-за дефектов в подошве рельса. Это свидетельствует, что известные способы и устройства не обеспечивают надежного и своевременного обнаружения указанных дефектов в рельсах.
Известно, что подошва уложенных в путь рельсов подвержена коррозионным повреждениям, которые в основном возникают в местах соприкосновения рельса со шпальными подкладками и, чаще всего, на краях шпальных подкладок. Эти места наиболее подвержены атмосферному влиянию, воздействию химических и абразивных веществ, утечкам тягового тока (электрокоррозия) и т.п. В местах коррозии подошвы возможны появления усталостных трещин и изломов - дефектов по коду 69 (По Инстр. «Дефекты рельсов. Классификация, каталог и параметры дефектных и остродефектных рельсов». Утв. ОАО «РЖД» расп. №2499р от 23.10.2014. - 140 с.).
Известно множество способов ультразвукового контроля подошвы рельсов, заключающийся в том, что излучают и принимают наклонным электроакустическим преобразователем в рельс с поверхности перьев подошвы [1, 2] и с боковых (кромочных) поверхностей подошвы [3] ультразвуковые колебания и по принятым эхо-сигналам судят о наличии внутренних дефектов в подошве рельса. Недостатком этих способов является низкое качество акустического контакта ультразвукового преобразователя с поверхностями перьев и краев подошвы контролируемого рельса, как правило, покрытой загрязнениями при эксплуатации, требующей тщательной предварительной зачистки. В связи с этим известные ультразвуковые способы обладают низкой надежностью контроля.
Известен ультразвуковой способ [4], заключающийся в том, что ультразвуковые колебания излучают с поверхности катания рельса лучом, угол раскрытия которого обеспечивает облучение радиусных переходов от шейки рельса к подошве отраженными от опорной плоскости подошвы ультразвуковыми колебаниями. Способ хотя и позволяет частично контролировать подошву рельса с поверхности катания, но обладает низкой чувствительностью и помехоустойчивостью к дефектам в перьях подошвы рельса.
Таким образом ультразвуковые способы не позволяют надежно и с высокой достоверностью обнаруживать дефекты подошвы рельсов.
Наиболее распространенным и широко используемым методом неразрушающего контроля, не требующим для проведения контроля идеальной поверхности сканирования, является метод рассеяния (вытеснения) магнитного потока Magnetic Flux Leakage (MFL), позволяющий обнаруживать не только коррозионные повреждения, но трещины и локальные дефекты на глубине до 20 мм и более. При этом контролируемая область изделия должна намагнититься мощным источником постоянного магнитного поля до состояния, близкого к насыщению. При наличии дефекта или коррозии картина магнитного поля вблизи сканируемой поверхности претерпит изменения - часть магнитного потока из ферромагнетика будет вытеснена наружу, что будет зафиксировано измерительным датчиком (преобразователи Холла, катушки индуктивности и др.) [5]. Достоинством магнитных способов дефектоскопии является простота практической реализации и высокая повторяемость результатов измерений.
Известен способ магнитного контроля рельсов [6], позволяющий обнаружить дефекты по всему сечению, в том числе и в подошве рельса, где намагничивание рельса осуществляют с помощью двух колец Гельмгольца, а с помощью датчиков, размещенных по всему периметру рельса, фиксируют изменения магнитного потока. Способ требует всестороннего доступа к рельсу, что в реальных условиях эксплуатации рельсов осуществить невозможно.
Известен способ магнитного контроля рельсов [7] в зоне сварных стыков, где множество магнитных датчиков, размещенных по периметру рельса (кроме участка подошвы снизу), фиксируют аномальные сварные стыки. Способ использует так называемый метод магнитной памяти металлов, который в России признан не пригодным для обнаружения дефектов из-за зависимости магнитного состояния металлов от множества внешних и внутренних факторов.
Известен способ магнитного контроля [8], в том числе и железнодорожных рельсов, где намагничивание контролируемого изделия производят с помощью электромагнита, где полюсами являются колеса, прикрепленные к сердечнику электромагнита с возможностью вращения. Способ позволяет инжектировать в изделие магнитное поле практически без технологического зазора между полюсами и сканируемыми поверхностями изделия и позволяет получать стабильные результаты контроля. Однако в известном способе не рассмотрены вопросы контроля подошвы рельса и возможности обнаружения дефектов в перьях подошвы.
Известен способ магнитной дефектоскопии железнодорожных рельсов [9], где намагничивание контролируемого изделия производят с помощью двух идентичных магнитов, обращенных друг к другу одноименными полюсами, при этом между магнитами установлен магнитопровод в виде диска с возможностью качения по поверхности головки рельса. Способ предназначен для обнаружения дефектов в головке рельсов и не может быть использован для дефектоскопии подошвы рельсов в силу конструктивных особенностей системы намагничивания.
Наиболее близким к заявляемому, и принятым за прототип, является способ магнитной дефектоскопии рельсов по патенту [10], где для реализации способа используют устройство, содержащее полый корпус из немагнитного материала, выполненный в форме железнодорожного колеса, внутри которого соосно с ребордой колеса установлены два идентичных магнита в виде диска, магниты обращены друг к другу одноименными полюсами и образуют между собой равномерный зазор.
Способ предназначен, как заявляет автор, для обнаружения дефектов по всему сечению рельса. Однако следует иметь в виду, что в годы применения прототипа известного технического решения [10], т.е. велодефектоскопов Карпова на сети дорог СССР (1935-1937 г. г.) в основном использовались железнодорожные рельсы легкого типа IIA-IVA и Р33 с массой на погонный метр не более 33 кг, что и позволяло делать определенные попытки обнаружения дефектов по всему сечению рельса (см. Фиг. 2 прототипа).
Современные рельсы тип Р65 имеют массу в два раза больше: 65 кг на погонный метр и высоту 180 мм (или Р75-75 кг и высоту 192 мм). В известном способе намагничивание осуществляется только со стороны поверхности катания головки рельса, что снижает эффективность инжекции магнитного потока в зоне подошвы рельса. Кроме того, наличие корпуса из немагнитного материала дополнительно отдаляет магнитные полюса от контролируемого изделия и снижает эффективность намагничивания, а значит, и достоверность обнаружения дефектов.
В прототипе не рассматриваются вопросы влияния на формируемое магнитное поле металлических скреплений рельсов, что также свидетельствует об отсутствии практической проверки реализуемости известного способа для обнаружения дефектов в подошве рельсов. Поэтому главными недостатками прототипа является невозможность применения способа для контроля рельсов в современных условиях и невозможность обнаружения дефектов в подошве рельса.
Целью изобретения является повышение надежности и достоверности обнаружения дефектов в подошве рельсов с учетом действующих в практике контроля мешающих факторов.
Техническим результатом заявляемого способа является надежное и достоверное обнаружение опасных дефектов в подошве рельса.
Указанная цель достигается тем, что в способе магнитной дефектоскопии подошвы рельсов, заключающийся в том, на дефектоскопическом средстве устанавливают устройство, создающее магнитное поле в рельсе, перемещают дефектоскопическое средство и фиксируют изменения магнитного поля на поверхности рельса с помощью магниточувствительного датчика, скользящего по поверхности рельса, причем перья подошвы намагничивают идентичными системами намагничивания симметрично с обеих сторон рельса до состояния близкого к насыщению и перемещают системы вдоль рельса синхронно, датчиками, размещенными в межполюсных пространствах на поверхностях перьев подошвы, фиксируют отклонения магнитного поля, сравнивают эти отклонения с правой и с левой стороны рельса, и по результатам сравнения принимают решение о наличии и местоположении дефекта в подошве рельса. Причем намагничивание производят двухполюсными магнитами с обеспечением постоянного и минимально возможного зазора между полюсами и поверхностями перьев подошвы в процессе перемещения системы вдоль рельса, а фиксацию отклонения магнитного поля осуществляют магниточувствительными датчиками, расположенными на перьях подошвы симметрично центральной продольной плоскости рельса.
Основными отличиями заявляемого способа по сравнению с прототипом являются:
1. Намагничивание перьев подошвы производят симметрично с обеих сторон рельса до состояния, близкого к насыщению путем установки систем намагничивания над перьями подошвы. В прототипе размещение системы намагничивания на головке рельса не позволяет намагнитить перья подошвы до нужного уровня и не позволяет реализовать метод вытеснения магнитного потока.
2. Фиксация отклонений магнитного поля одновременно с правой и левой стороны подошвы рельса в процессе сканирования позволяет фиксировать даже слабые отклонения магнитного поля (например от трещин на концах перьев подошвы) и не только фиксировать наличие дефекта, но и определять его местонахождение (с правой или с левой стороны) от центральной продольной плоскости рельса.
3. Согласно заявляемому способу, предлагается учитывать симметрию фиксируемых магнитных полей относительно центральной продольной плоскости рельса при отсутствии дефекта. При наличии дефекта в правом, или левом сечении перьев подошвы, указанная симметрия нарушается. Сравнение этих отклонений позволяет компенсировать мешающее воздействия изменений уровней напряжения на датчиках из-за влияния металлических скреплений и осуществлять выявление не идентичности сигналов при наличии дефекта. В прототипе вопросы влияния металлических скреплений на результаты контроля не рассматриваются.
4. Намагничивание перьев производят двухполюсными магнитами с обеспечением постоянного и минимально возможного зазора между полюсами и поверхностями перьев подошвы в процессе синхронного перемещения систем. В прототипе намагничивание производят с головки рельса и вопросы намагничивания перьев подошвы не рассматриваются.
5. Фиксацию отклонения магнитного поля осуществляют магниточувствительными датчиками, расположенными симметрично центральной продольной плоскости рельса на перьях подошвы с возможность скольжения, что обеспечивает идентичность сигналов контроля при контроле бездефектного участка подошвы и четкое отклонение уровня сигналов на одном из датчиков в зависимости от места расположения трещины в правом или левом пере подошвы. В прототипе вопросы детализации места нахождения дефекта в подошве рельса не рассматриваются.
Заявляемый способ иллюстрируют графические материалы:
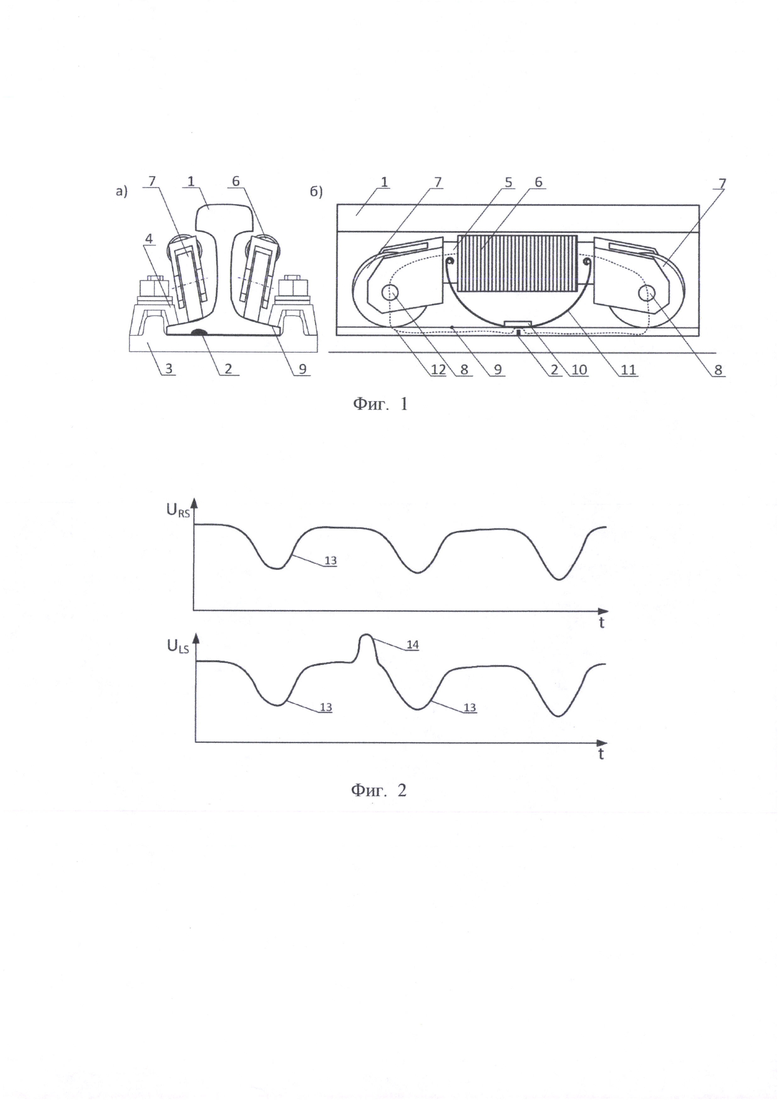
Фиг. 1 а и б - размещение конструкции намагничивающих устройств на рельсе, где:
1. Контролируемое изделие - железнодорожный рельс.
2. Дефект - поперечная трещина кода 69 в пере подошвы железнодорожного рельса.
3 и 4. Подкладка 3 и скрепления 4 рельса к подкладке.
5. Система намагничивания с магнитопроводом.
6. Источник магнитного поля (катушка электромагнита или набор постоянных магнитов).
7. Полюса магнита (или электромагнита), в рассматриваемом варианте выполнены в виде колес, закрепленных по концам магнитопровода с возможностью вращения на осях 8.
8. Оси колес.
9. Поверхность пера подошвы.
10. Магниточувствительный датчик (или линейка датчиков).
11. Упругое крепление датчика.
12. Траектории магнитного потока в зоне контроля изделия.
Фиг. 2. Сигналы на магниточувствительных датчиках 10, размещенных на поверхностях 9 перьев подошвы с обеих стороны рельса 1, где:
URS - сигнал на правом (относительно фиг. 1а) пере рельса 1;
ULS - сигнал на левом пере рельса 1;
13 - изменения (уменьшения) уровня сигналов в зоне рельсовых скреплений;
14 - реакция на дефект 2 в левом пере.
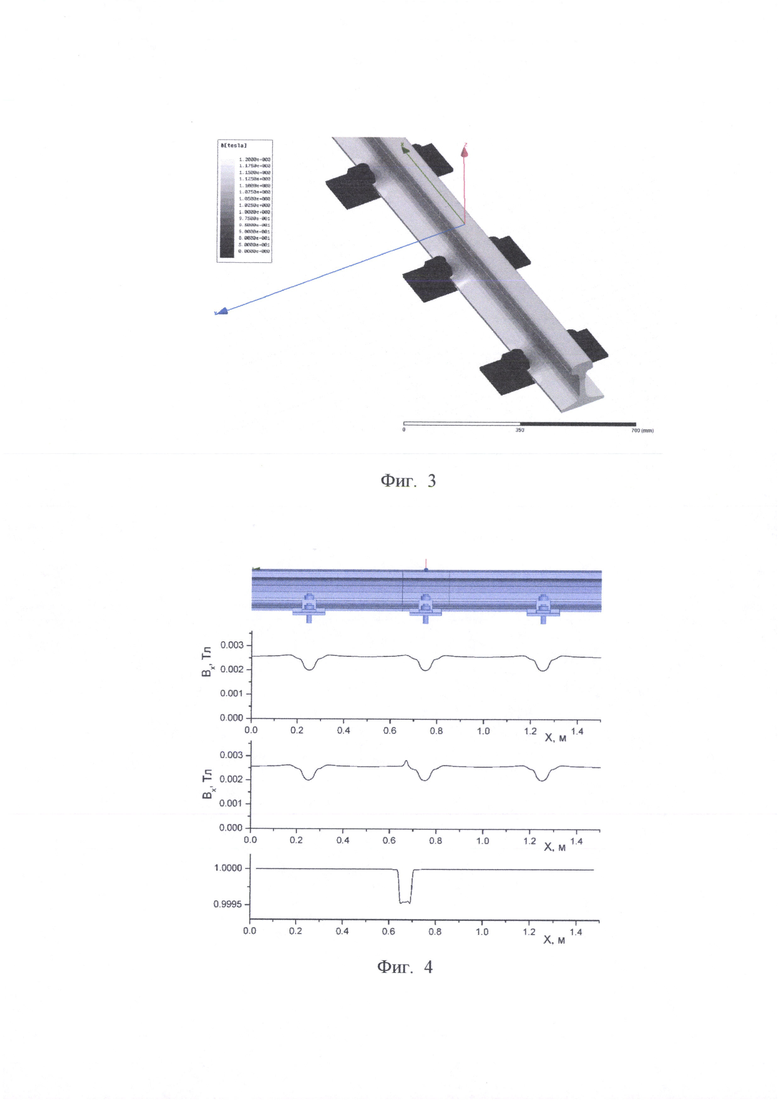
Фиг. 3. Результаты математического моделирования магнитных полей на поверхности рельса.
Фиг. 4. Результаты корреляционной обработки сигналов при обнаружении дефектного сечения рельсов.
Рассмотрим возможность реализации заявляемого способа на примере обработки сигналов магнитного метода в процессе обнаружения поперечной трещины кода 69 в пере подошвы рельса.
На перья подошвы с двух сторон рельса 1 устанавливаются системы намагничивания 5 с возможностью перемещения их вдоль рельса минуя рельсовые скрепления 4 и элементы подкладки 3 (Фиг. 1). В приведенном примере реализации способа применяются электромагниты 5 с сердечником, катушкой 6, с необходимым количеством витков, и полюсами 7, выполненными в виде колес с возможностью вращения относительно осей 8. Оси колес выполнены на концах магнитопровода 5 (Фиг. 1б). При включении электромагнита (источник питания на Фиг. не показан), через пятна контакта полюсов-колес 7 и поверхностей перьев 9 в подошве рельса 1 возникает магнитное поле, траектория 12 которого на Фиг. 1б показан пунктирной линией. При наличии в пере подошвы поперечной трещины 2 (Фиг. 1а), часть вытесняемого дефектом магнитного поля 12 (поле рассеяния) фиксируется магниточувствительным датчиком 10, установленным с помощью упругого крепления 11 в межполюсном пространстве на поверхности 9 пера с возможностью скольжения (Фиг. 16).
С помощью мобильного магнитного дефектоскопа (на Фиг. не показан) системы намагничивания 5 синхронно перемещаются вдоль рельса. Фиксируемые в процессе перемещения систем 5 сигналы с датчиков 10 (например, датчиков Холла) с правой и с левой стороны рельса 1 представляют собой идентичные волнистые линии с уровнями URS и ULS (Фиг. 2). При проходе датчиков 10 мимо зон металлических рельсовых скреплений 3 и 4, на дефектограммах наблюдаются характерные спады 13, вызванные перераспределением магнитного потока на металлическую массу скреплений.
Наличие поперечной трещины 2, в основном развивающейся со стороны подошвы рельса, вызывают кратковременные изменения (повышения) 14 уровня регистрируемого сигнала (см. Фиг. 2) со стороны размещения дефекта относительно центральной продольной плоскости рельса. В практических условиях выявление такого изменения 14 весьма затруднительно из-за незначительного уровня изменения (увеличения) сигнала над дефектом на фоне значительных колебаний уровней сигналов 13 из-за влияния скреплений.
На Фиг 3 и 4 приведены результаты расчетов модели - распределение магнитных полей на отрезке рельса длиной 1.5 м, с тремя металлическими скреплениями через 0.5 м. Математическое моделирование распределения магнитных полей в контролируемых зонах изделия (перьев подошвы рельса) выполнено методом конечных элементов в программе ANSYS Maxwell.
На Фиг. 4 два верхних графика показывают распределения продольной составляющей поля в воздухе на расстоянии 2 мм над поверхностями 9 перьев подошвы (на датчиках 10 с протектором толщиной 2 мм) на продольной траектории вдоль края пера в 25 мм от края по обеим сторонам рельса. Дефект в виде поперечной трещины круглого сечения (центр окружности располагается на нижней грани подошвы в 25 мм от края пера, радиус окружности 8 мм) находится в 80 мм левее центра центрального крепления (на краю скрепления). Практически на любых сканируемых магнитных дефектоскопах предусматриваются датчики пути (одометры) (на Фиг. не показан), поэтому сигналы получаемые на дефектограммах во временном масштабе t (Фиг. 2) всегда можно преобразовать в сигналы, привязанные к продольной координате х по пути сканирования (длине контролируемого рельса) (Фиг. 4).
На Фиг. 3, в зоне расположения дефекта (на краю второго скрепления), виден повышенный уровень магнитного поля (на Фиг. чем светлее зона, тем выше уровень магнитного поля). Также на втором графике Фиг. 4, около второго спада уровня (из-за второго скрепления) наблюдается кратковременное повышение уровня сигнала, вызванное вытеснением поперечной трещиной 2 магнитного поля. Действительно, визуально сложно осуществить селекцию сигнала от дефекта на фоне колебаний уровней сигналов. В тоже время взаимное сравнение сигналов с магниточувствительных датчиков 10, перемещаемых по поверхностям 9 перьев подошвы по обеим сторонам вдоль рельса 1, позволят фиксировать нарушение симметрии наблюдаемых сигналов.
В качестве магниточувствительных датчиков 10 при реализации предлагаемого способа могут использоваться индукционные, магниторезистивные, феррозондовые измерительные преобразователи или датчики Холла. В общем случае, при реализации способа в качестве датчиков могут применяться и линейки (матрицы) датчиков Холла. Точность измерения указанных преобразователей различна и зависит от реализуемых скоростей сканирования. В рассматриваемом случае датчики 10 магнитного поля типа датчиков Холла располагаются на поверхностях 9 перьев подошвы рельса в межполюсном пространстве системы намагничивания 5.
Для автоматического выявления указанных изменений в сигналах магнитного способа дефектоскопии могут использоваться различные методы анализа: спектральный, корреляционный и другие. С целью исключения сужения формулы изобретения конкретный метод анализа в формуле изобретения предлагается не указывать.
Рассмотрим пример сравнения сигналов при использовании корреляционного анализа. Корреляционный анализ предполагает вычисление коэффициента взаимной корреляции K между дискретизированными сигналами URS и ULS, полученными датчиками 10 с правой и левой стороны подошвы рельса (Фиг. 1 и 2) соответственно:
Параметр w в (1) определяет полуширину окна корреляции - отрезка по продольной координате, на котором сравниваются сигналы URS и ULS.
В качестве примера показаны результаты корреляционной обработки измерений (Фиг. 4 нижний график), полученных датчиками 10 на бездефектном и дефектном участках подошвы рельса 1. На бездефектном участке значение коэффициента взаимной корреляции K, вычисленного по выражению (1) при окне 2w=50 мм, находится на уровне, близкой к 1,0. Над сигналами на дефектном сечении коэффициент корреляции резко падает (до 0,995). Причем в основу расчета положена трудно выявляемая на практике развивающаяся от подошвы поперечная трещина выстой всего лишь 8 мм, смещенная от грани подошвы на 25 мм. Естественно, при больших размерах трещин, чаще всего встречающихся на практике, спад значения К на дефектном сечении будет более значителен. При автоматизации процесса поиска дефектов, выбор порога обнаружения осуществляется по результатам экспериментальных исследований.
При реализации способа в качестве системы намагничивания могут использоваться постоянные магниты или электромагниты, обеспечивающие намагничивание подошвы рельса до состояния близкого к насыщению, при котором создается мощное магнитное поле, проникающее в объект до 20 мм и более, т.е. по всей толщине перьев подошвы рельса.
Существенным признаком предлагаемого способа является сравнение уровней сигналов, получаемых с обеих сторон рельса. Корректное сравнение и выявление дефектов на фоне неизбежных колебаний уровней сигналов из-за влияния металлических масс рельсовых скреплений возможно только при стабильном намагничивании контролируемых зон. Для этого необходимо обеспечить постоянный и минимально возможный зазор z между полюсами магнитов и сканируемыми поверхностями.
Для выполнения этого условия при использовании П-образных магнитов и перемещении магнитов вдоль рельса необходимо принимать специальные меры (скользящие немагнитные прокладки постоянной толщины или упорные ролики). Условие создания стабильного потока можно выполнить и при использовании в качестве полюсов магнита катящихся по сканируемой поверхности колес [8]. При этом зазор между полюсами магнита и сканируемой поверхностью перьев подошвы (z=0) является минимально возможной и обеспечивается стабильное промагничивание подошвы рельса.
Результаты моделирования (Фиг. 3 и 4) и последующая их экспериментальная проверка на рельсах типа Р65 (наиболее распространенный тип рельса на сети дорог ОАО «РЖД») показывают, что заявляемый способ обеспечивает надежное выявление дефектов в подошве рельсов.
Таким образом, между совокупностью существенных признаков заявляемого способа и достигаемым техническим результатом существует причинно-следственная связь, а именно:
- намагничивание идентичными системами намагничивания перьев подошвы симметрично с обеих сторон рельса создает возможность реализации метода MFL (вытеснения магнитного потока) для обнаружения дефектов в подошве рельсов магнитным способом;
- сравнение уровней отклонений магнитного поля с правой и с левой стороны рельса магниточувствительными датчиками, и принятие, по результатам сравнения, решения о наличии и местоположении дефекта в подошве рельса повышает достоверность контроля подошвы рельсов;
- обеспечение постоянного и минимально возможного зазора между полюсами магнита и сканируемыми поверхностями перьев подошвы в процессе синхронного движения систем вдоль рельса, устраняет нежелательные колебания уровней регистрируемых магнитных полей на датчиках и повышает достоверность контроля;
- размещение магниточувствительных датчиков на перьях подошвы симметрично центральной продольной плоскости рельса позволяет получать сигналы идентичной формы и одинакового уровня и четкое изменение идентичности при наличии дефекта в одной из перьев подошвы рельса, что так же повышает достоверность контроля.
Таким образом, заявляемый способ может быть реализован и позволяет получить заявленный технический результат: надежное и достоверное обнаружение опасных дефектов в подошве рельса.
Источники информации.
1. Патент SU 1732260
2. Патент RU 2645818
3. Патент US 4593569
4. Патент RU 2353924
5. J.C. Drury. Magnetic flux leakage technology. Available at:
http://www.silverwinguk.com/ndt technical papers, aspx (20/3/2019).
6. Патент RU 2645830
7. Патент CN 204594929
8. Патент RU 2680103
9. Патент RU 2715473
10. Патент RU 2313782.
| название | год | авторы | номер документа |
|---|---|---|---|
| Намагничивающее устройство дефектоскопа | 2019 |
|
RU2715473C1 |
| Способ скоростной магнитной дефектоскопии длинномерных изделий | 2019 |
|
RU2707977C1 |
| Устройство намагничивания для средств неразрушающего контроля длинномерных изделий | 2019 |
|
RU2702809C1 |
| Способ автоматического мониторинга состояния рельсовых плетей железнодорожного пути | 2023 |
|
RU2800214C1 |
| ИЗМЕРИТЕЛЬ МАГНИТНОГО ДЕФЕКТОСКОПА ПРОТЯЖЕННОГО ИЗДЕЛИЯ СЛОЖНОЙ ФОРМЫ | 2016 |
|
RU2645830C1 |
| Способ оценки стыковых зазоров рельсов железнодорожного пути | 2022 |
|
RU2793171C1 |
| Устройства намагничивания для дефектоскопии подошвы рельса | 2020 |
|
RU2745662C1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2015 |
|
RU2586090C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| Способ магнитного обнаружения регулярных объектов рельсов | 2017 |
|
RU2671368C1 |
Использование: для магнитной дефектоскопии подошвы рельсов. Сущность изобретения заключается в том, что на дефектоскопическом средстве устанавливают устройство, создающее магнитное поле в рельсе, перемещают дефектоскопическое средство и фиксируют изменения магнитного поля на поверхности рельса с помощью магниточувствительного датчика, скользящего по поверхности рельса, причем перья подошвы намагничивают идентичными системами намагничивания симметрично с обеих сторон рельса до состояния, близкого к насыщению, и перемещают системы вдоль рельса синхронно датчиками, размещенными в межполюсных пространствах на поверхностях перьев подошвы, фиксируют отклонения магнитного поля, сравнивают эти отклонения с правой и с левой стороны рельса и по результатам сравнения принимают решение о наличии и местоположении дефекта в подошве рельса. Намагничивание производят двухполюсными магнитами с обеспечением постоянного и минимально возможного зазора между полюсами и поверхностями перьев подошвы в процессе перемещения системы вдоль рельса, а фиксацию отклонения магнитного поля осуществляют магниточувствительными датчиками, расположенными на перьях подошвы симметрично центральной продольной плоскости рельса. Технический результат: обеспечение возможности надежного и достоверного обнаружения опасных дефектов в подошве рельса. 2 з.п. ф-лы, 4 ил.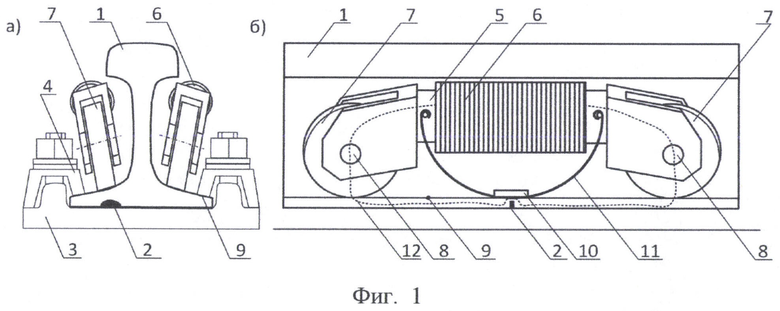
1. Способ магнитной дефектоскопии подошвы рельсов, заключающийся в том, что на дефектоскопическом средстве устанавливают устройство, создающее магнитное поле в рельсе, перемещают дефектоскопическое средство и фиксируют изменения магнитного поля на поверхности рельса с помощью магниточувствительного датчика, скользящего по поверхности рельса, отличающийся тем, что перья подошвы намагничивают идентичными системами намагничивания симметрично с обеих сторон рельса и перемещают системы вдоль рельса синхронно датчиками, размещенными в межполюсных пространствах на поверхностях перьев подошвы, фиксируют отклонения магнитного поля, сравнивают эти отклонения с обеих сторон рельса и по результатам сравнения принимают решение о наличии и местоположении дефекта в подошве рельса.
2. Способ магнитной дефектоскопии подошвы рельсов по п. 1, отличающийся тем, что намагничивание производят двухполюсными магнитами с обеспечением постоянного и минимально возможного зазора между полюсами и поверхностями перьев подошвы в процессе перемещения системы вдоль рельса.
3. Способ магнитной дефектоскопии подошвы рельсов по п. 1, отличающийся тем, что фиксацию отклонения магнитного поля осуществляют магниточувствительными датчиками, расположенными на перьях подошвы симметрично центральной продольной плоскости рельса.
| УСТРОЙСТВО НАМАГНИЧИВАНИЯ ДЛЯ СРЕДСТВ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2006 |
|
RU2313782C2 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| ДЕФЕКТОСКОПНОЕ ПЕРЕДВИЖНОЕ СРЕДСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2228870C2 |
| УПРАВЛЕНИЕ ПОДВОДОМ ТЕПЛА ДЛЯ СВАРОЧНЫХ СИСТЕМ | 2011 |
|
RU2555308C2 |
| US 6549005 B1, 15.04.2003. | |||

