Изобретение относится к радиолокационной технике и может быть использовано для обнаружения и измерения расстояний до разного рода неподвижных объектов, а также для измерения радиальной скорости движущихся объектов. Способ может быть использован в радиолокации и гидролокации, в области геологии, археологии, в землеустроительных работах и других сферах деятельности, где необходимо измерять расстояния до недоступных объектов.
Известны способы измерения дальности до цели, заключающиеся в излучении зондирующего импульса (ЗИ) с линейной частотной модуляцией несущей частоты (ЛЧМ) и обработке отраженных импульсов (ОИ) либо корреляционно-фильтровым способом, либо путем сжатия длительности ОИ с помощью согласованного фильтра.
Такие способы и устройства описаны в технической и патентной литературе, например:
Теоретические основы радиолокации, учебник под ред. Ширмана Я. Д, стр.120, 128, 135, "Войска ПВО страны", 1968 г;
Справочник по радиолокации, т.3, под ред. М. Сколника, стр.400, 403, 383, М. "Советское радио", 1979 г;
FM radar apparatus: Пат.5905458 США, МПК6 G01S 13/42/ Ashihara J.; Honda Giken Kogyo K, K - №08/974013; Заявл. 19.11.97; Опубл. 18.5.99; Приор. 19.11.96, №8-308440 (Япония): НПК 34270.
Данные способы за счет использования частотной модуляции обеспечивают обнаружение целей на больших расстояниях с высокой разрешающей способностью по дальности тогда, когда время задержки ОИ больше длительности ЗИ, т.е. когда ОИ не перекрывается по времени с ЗИ.
Увеличение длительности ЗИ является средством увеличения его энергии в условиях, когда достигнута предельная пиковая мощность передатчика. Длительность ЗИ может быть доведена до величины, равной удвоенному времени распространения сигнала до цели, находящейся на максимальном расстоянии. Чтобы принять весь сигнал с максимальной дальности длительность интервала приема должна быть не меньше длительности ЗИ. При этом импульсы, отраженные от целей, находящихся на меньших расстояниях, начнут поступать еще во время излучения.
В однопозиционных РЛС для защиты приемника от мощного излучения его входные цепи на время излучения блокируются. Вследствие этого на выходе приемника происходит укорочение длительности ОИ. По этой причине уменьшается база сигнала, равная произведению ширины спектра на длительность сигнала. Соответственно, при фильтрации ОИ уменьшается степень сжатия его длительности и как результат этого, падает разрешающая способность и точность измерения дальности, что и является недостатком данных способов.
Кроме того, текущий замер дальности цели содержит ошибку из-за доплеровского смещения несущей частоты ОИ.
Эта ошибка устраняется путем реализации способа, который включает последовательное излучение сигнала с ЛЧМ несущей частоты с определенной крутизной и без ЛЧМ, измерение доплеровского сдвига частоты сигнала от цели и вычисление дальности до цели делением разности доплеровского сдвига на удвоенную крутизну изменения несущей частоты. (См. М. Сколник, стр.383, М. "Советское радио", 1979 г.).
Однако этот способ не решает проблемы снижения разрешающей способности и точности измерения дальности при наложении интервалов времени формирования зондирующего и времени прихода отраженных импульсов.
Известен способ последовательного излучения сигнала с двумя рабочими частотами повторения импульсов, определения временного положения отраженных от цели импульсов на каждой частоте повторения и определения истинной дальности. Данный способ обеспечивает измерение дальности в режиме обзора в РЛС со средней частотой повторения, (см. "Бортовые радиолокационные системы" под ред. Д. Повейсила., Р. Ровена, П. Уотермана, Воениздат МО СССР, Москва, 1964 г., стр.317-320).
Недостатком этого способа является неоднозначность измерения дальности, которая тем больше, чем больше период повторения. Увеличение периода повторения ведет к снижению средней мощности ЗИ, следствием чего является уменьшение дальности действия РЛС. Так же, как и предыдущие способы, данный способ не обеспечивает постоянства разрешающей способности и точности измерения дальности при перекрытии интервала зондирования и времени поступления отраженных импульсов.
Известен способ, состоящий в сочетании операций двух способов -линейно-частотной модуляции и двухчастотного. Способ заключается в излучении импульсных сигналов с частотой повторения F1, приеме отраженных импульсных сигналов и измерении их доплеровской частоты f1, последующем излучении сигналов с линейно-частотной модуляцией несущей частоты с крутизной S, приеме отраженного ЛЧМ сигнала, измерении разности частот f2 между излучаемым и принимаемым ЛЧМ сигналами и вычислении дальности по определенной формуле, измерении задержки отраженных импульсных сигналов t1 на частоте повторения F1, дополнительном излучении импульсных сигналов с частотой повторения F2, рассчитываемой по приведенной формуле в зависимости от максимально возможной ошибки измеренного значения дальности, приеме отраженных сигналов и измерении их задержки t2, а истинную дальность определяют по указанной в изобретении формуле. (См. "Способ измерения дальности". Патент РФ, №2145092, G01S 13/02, М, 27.01.2000, авторы Бабичев В.А.; Ривес Л.С.; Риман А.И.; Сирота О.А.; Дубинский М.Л.; Гринберг В.Б.; Синицына О.С.).
Данный способ обеспечивает высокую точность измерения дальности при применении его в РЛС с высокой частотой повторения импульсов. Однако он не может применяться в РЛС, излучающей импульсы большой длительности с низкой частотой повторения. Способ требует излучения ряда импульсов, т.е. не является моноимпульсным, что ведет к увеличению времени обзора пространства.
Так же, как и выше приведенные способы, данный способ не решает проблемы снижения разрешающей способности и точности измерения дальности при перекрытии интервала зондирования и времени поступления отраженных импульсов.
Поэтому из всех известных способов обеспечения требуемой разрешающей способности по дальности для обнаружения целей на больших и меньших расстояниях в качестве прототипа более всего подходит первый, указанный выше, способ (См. Теоретические основы радиолокации, учебник под ред. Ширмана Я.Д., стр.120, 128, 135, "Войска ПВО страны", 1968 г). Этот способ является базовым для всех остальных, хотя в его описании отсутствуют такие необходимые для практической реализации узлы, как усилитель, модулятор, смеситель, генератор несущей частоты и т.п.
При использовании этого способа для поддержания одинаковой разрешающей способности и точности во всем диапазоне дальности можно было бы излучать ЗИ с фиксированной девиацией и с длительностью, соответствующей каждому каналу дальности (элементу разрешения). В этом случае число интервалов "излучение - прием" стало бы равным числу каналов дальности, значение которого может доходить до десятков тысяч. Соответственно, в такое же число возросла бы длительность периода обзора пространства, что делает нереальным использование такого способа.
Можно реализовать вариант, в котором весь диапазон дальности РЛС предварительно разбивается на ряд из трех - пяти участков дальности. Для просмотра участков организуются интервалы поочередного излучения и приема импульсов соответствующей длительности и с одинаковой девиацией частоты. Для самого дальнего участка используется ЗИ максимальной длительности. Для других участков используются более короткие ЗИ. Длительность каждого ЗИ берется, к примеру, равной ½ от длительности предыдущего ЗИ. В этом случае обеспечивается заданное значение разрешающей способности в середине каждого участка, а к краям участков она снижается на 1/3 (в данном примере), а в общем случае - до значения, определяемого количеством и расстановкой участков. При таком способе работы в РЛС сохраняется, хотя и снижается, неравномерность разрешающей способности по дальности. Введение же, кроме длинного интервала "излучение - прием", дополнительных более коротких интервалов, приводит к увеличению периода просмотра диапазона дальности не меньше, чем в 1,5 раза, что в свою очередь ведет к пропорциональному увеличению времени просмотра сектора ответственности РЛС, что является нежелательным, а иногда недопустимым ограничивающим фактором.
Кроме того, фильтрация, согласованная с зондирующим ЛЧМ сигналом, обеспечивает измерение дальности с ошибкой, вносимой доплеровским смещением несущей частоты. Устранение этой ошибки обеспечивается путем нескольких измерений, вычисления скорости и уточнения расстояний в процессе построения траектории. При этом затягивается процесс траекторией обработки.
Целью изобретения являются:
- обеспечение постоянной разрешающей способности измерения расстояний до целей во всем диапазоне дальности при излучении одного модулированного импульса и обработке отраженных импульсов, длительность которых равна или меньше длительности зондирующего импульса;
- обеспечение одновременного измерения расстояний до целей и радиальных скоростей целей
Реализация этих целей достигается использованием предлагаемого ниже способа.
В способе, заключающемся в излучении одного ЛЧМ импульса и обработке отраженных импульсов (ОИ) согласованным фильтром сжатия, для достижения поставленных целей согласно настоящему изобретению излучаемый импульс формируется в виде цифровой последовательности комплексных отсчетов сигнала на нескольких временных участках, следующих слитно друг за другом с последовательно уменьшающейся длительностью, внутри каждого участка сигнал является частотно-модулированным с изменением частоты модуляции от нуля до частоты девиации Fдев, отсчеты сигнала вычисляются с частотой дискретизации Fф>2Fдев, вычисленные отсчеты на каждом участке переставляются по времени в пределах участка, образуя, таким образом, вектор квазислучайной фазомодулированной последовательности отсчетов; с началом цикла излучения эта последовательность преобразуются цифро-аналоговым преобразователем в последовательность импульсов напряжения, которая пропускается через фильтр нижних частот, ограничивающий полосу частот сигнала полосой ΔFм≥Fдев, с выхода фильтра нижних частот сигнал переносится на несущую частоту f0, усиливается по мощности и через антенный переключатель передается в антенну на излучение; принимаемые антенной в цикле приема отраженные от целей импульсы усиливаются, фильтруются на несущей частоте f0 полосовым фильтром с полосой пропускания ΔFм, дискретизируются по времени с частотой Fд≥2ΔFм с выполнением условия f0=nFд+ΔFм/2, n=1, 2, 3, …, и квантуются по уровню аналого-цифровым преобразователем, затем действительные цифровые отсчеты отраженных сигналов путем цифрового квадратурного гетеродинирования переносятся на нулевую частоту, комплексные результаты гетеродинирования пропускаются через цифровой комплексный фильтр нижних частот с полосой пропускания ΔFм, на выходе фильтра нижних частот формируется последовательность комплексных отсчетов с частотой следования Fc≥ΔFм, которые затем обрабатываются фильтром сжатия, импульсная характеристика которого по длительности, по функции фазовой модуляции и по ожидаемым доплеровским сдвигам частоты согласована с отраженным импульсом; при этом задержка полученной на выходе фильтра максимальной амплитуды сигнала соответствует расстоянию до обнаруженной цели, а частота импульсной характеристики, при которой получена максимальная амплитуда, соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью.
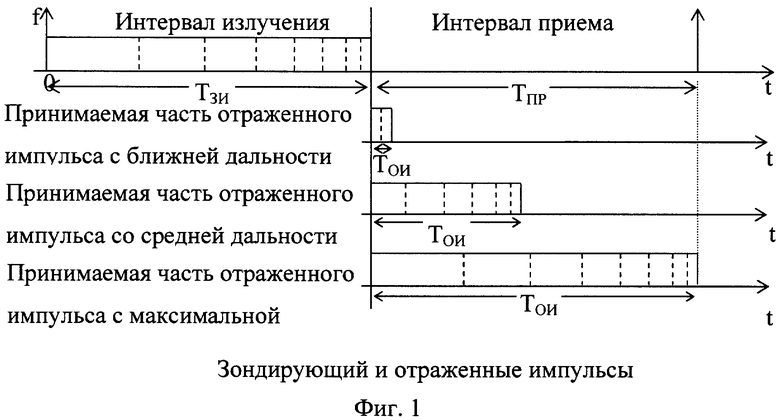
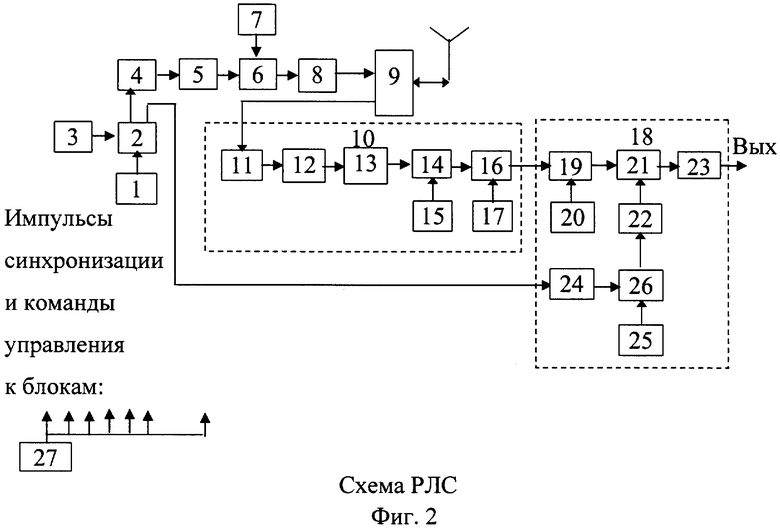
Для наглядного представления возможности обеспечения постоянной разрешающей способности во всем диапазоне дальности при излучении одного составного зондирующего импульса на фиг.1 изображен такой ЗИ, а также поступающие на вход фильтра сжатия импульсы, отраженные от целей, находящихся на разных расстояниях. Пунктирными линиями показаны временные интервалы участков. Изображен случай равенства интервалов излучения ТЗИ и приема ТПР. Из рисунка видно, что при любой дальности ширина спектра ОИ равна диапазону частот модуляции Fм≥Fдев, что и обеспечивает сохранение постоянной разрешающей способности во всем диапазоне дальности. В качестве примера возможного варианта реализации этого способа на фиг.2 приведена упрощенная блок-схема РЛС.
На фиг.2 обозначено:
1 - цифровой генератор составного ЛЧМ-импульса;
2 - ОЗУ квазислучайных отсчетов ЗИ;
3 - генератор квазислучайных адресов;
4 - цифро-аналоговый преобразователь (ЦАП);
5 - аналоговый фильтр нижних частот (ФНЧ);
6 - квадратурный модулятор;
7 - генератор несущей частоты;
8 - усилитель мощности;
9 - антенный переключатель;
10 - аналого-цифровой приемник;
11 - усилитель высокой частоты;
12 - полосовой фильтр;
13 - аналого-цифровой преобразователь (АЦП);
14 - умножитель;
15 - ОЗУ коэффициентов цифрового гетеродина;
16 - цифровой комплексный фильтр нижних частот (ЦФНЧ);
17 - ОЗУ коэффициентов ЦФНЧ;
18 - согласованный фильтр сжатия импульса с квазислучайной фазовой модуляцией;
19 - буферное ОЗУ входных отсчетов;
20 - счетчик адреса;
21 - умножитель комплексных чисел с накапливающим сумматором;
22 - ОЗУ весовых коэффициентов фильтра сжатия;
23 - детектор;
24 - буферное ОЗУ коэффициентов фазовой модуляции;
25 - генератор комплексной синусоиды доплеровской частоты;
26 - умножитель комплексных чисел;
27 - блок синхронизации и управления.
Работа РЛС происходит следующим образом.
В блоке 1 до начала излучения вычисляются комплексные цифровые многоразрядные коды частотно-модулированных отсчетов ЗИ, описываемые выражением (I):

где z(n) - значение ЗИ в момент времени nTф, отсчитываемый от начала и до конца излучения;
exp{…} - комплексная синусоида, exp{…}=cos{…}+)jsin{…};
n - номер такта формирования ЗИ от начала излучения;
Tф - такт формирования сигнала, Tф=1/Fф;
m - номер участка сигнала, m=1÷M;
Tm - длительность m-ого участка сигнала;
Fдев - значение девиации частоты модуляции;
γm - скорость изменения частоты на m-ом участке сигнала;
NЗИ - число тактов дискретизации (формирования) ЗИ. Это число отсчетов ЗИ, NЗИ=ТЗИFф;
- Nнm - номер такта, соответствующий началу m-го участка ЗИ.
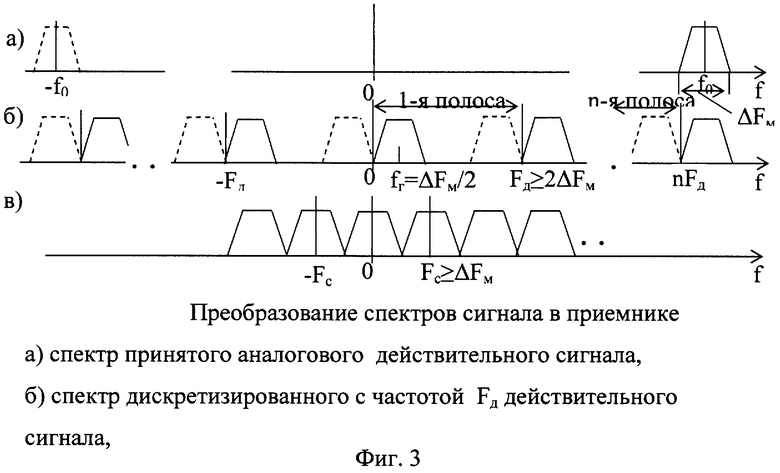
Отсчеты, вычисляемые в блоке 1 в пределах каждого участка сигнала, с помощью генератора 3 квазислучайных натуральных чисел (адресов) записываются ОЗУ 2, так что отсчеты с выхода генератора ЛЧМ импульсов оказываются случайным образом переставленными в пределах участков ЛЧМ. После этого весь массив отсчетов ЗИ записывается в буферное ОЗУ 24 фильтра сжатия 18 для последующего вычисления весовых коэффициентов фильтра. На интервале излучения в моменты времени, отсчитываемые от начала излучения и задаваемые тактовыми импульсами блока 27 синхронизации и управления, производится последовательное чтение отсчетов ЗИ из ОЗУ 2. Благодаря квазислучайному расположению отсчетов в ОЗУ 2, при последовательном чтении адресов на выходе ОЗУ 2 формируется комплексная квазислучайная последовательность отсчетов с разными значениями фаз, которая поступает на входы двухканального блока 4 цифро-аналогового преобразователя. В блоке 4 коды отсчетов обоих квадратур преобразуются в напряжения, которые фильтруется сдвоенным аналоговым фильтром нижних частот в блоке 5. ФНЧ выделяют полосу частот модуляции ΔFм≥Fдев. Квадратурные сигналы модуляции от блока 5 поступают на два первых входа квадратурного модулятора 6, на два вторых входа которого от генератора 7 подаются соответственно синусная и косинусная составляющие гармонического сигнала несущей частоты f0. На выходе модулятора несущий сигнал будет иметь квазислучайную фазовую модуляцию (ФМ). С выхода модулятора сигнал подается на усилитель мощности 8 и через антенный переключатель 9 поступает на излучение в антенну. Антенный переключатель 9 подключает антенну к выходу усилителя мощности 8 на время излучения и подключает антенну к входу приемника 10 на время приема. Отраженные от целей сигналы, принимаемые антенной, через переключатель 9 поступают в аналого-цифровой приемник 10. В приемнике они усиливаются усилителем 11, фильтруются полосовым фильтром 12, полоса пропускания которого равна полосе частот модуляции ΔFм, дискретизируются по времени с частотой Fд≥2ΔFм с обеспечением выполнения условия f0=nFд+ΔFм/2, n=1, 2, 3, …, и квантуются по уровню в АЦП 13. Для наглядности на фиг.3 изображен характер преобразования спектров сигнала в приемнике. Полученные действительные отсчеты сигнала умножаются в блоке 14 на выборки комплексной синусоиды частоты ΔFм/2, поступающие с тактом Тд=1/Fд из ОЗУ 15, выполняющим функцию цифрового гетеродина. Результаты умножения - квадратурные составляющие, подвергаются фильтрации в блоке 16 цифровым комплексным фильтром нижних частот с полосой пропускания ΔFм. Коэффициенты импульсной характеристики ЦФНЧ хранятся в ОЗУ 17 и подаются на вторые входы блока 16. На выходе ЦФНЧ отсчеты формируются с частотой Fc≥ΔFм в соответствии с полосой ЦФНЧ ΔFм и комплексной формой отсчетов. Эти отсчеты передаются в фильтр сжатия 18, где записываются в буферное ОЗУ 19, откуда они по кодам управления от счетчика адреса 20 считываются поочередно для каждого канала дальности и доплеровской частоты и поступают в умножитель 21 комплексных чисел с накапливающим сумматором, выполняющими основную операцию согласованной фильтрации - когерентное накопление сигнала. Таким образом, обработка принятого сигнала в разных доплеровских каналах достигается путем последовательного вычисления функции свертки в фильтре 18 для разных значений доплеровской частоты, вырабатываемых блоком 25. Число доплеровских каналов определяется желаемой точностью определения радиальной скорости цели. Минимальное и максимальное ожидаемое доплеровское смещение определяются ожидаемым диапазоном скоростей обнаруживаемых целей. Обработка принятого сигнала в различных каналах дальности осуществляется для разных значений задержки принятого сигнала относительно начала цикла приема в пределах от 0 до TЗИ. Согласованный фильтр формирует выходной отсчет сжатого отраженного импульса для каждого канала дальности и для каждой доплеровской частоты путем вычисления свертки входных отсчетов ОИ с весовыми коэффициентами фильтра, сформированными с учетом длительности и вида функции модуляции сигнала, поступающего с ожидаемого рубежа дальности, а также с учетом ожидаемого доплеровского смещения частоты. Вектора весовых коэффициентов фильтра сжатия сигнала по дальности и для всех ожидаемых доплеровских смещений размером NЗИ коэффициентов каждый рассчитываются на интервале излучения путем умножения в блоке 26 квазислучайной последовательности комплексных отсчетов функции фазовой модуляции ЗИ, считываемой из буферного ОЗУ 24, на комплексные синусоиды соответствующих доплеровских частот, формируемых генератором 25. Результаты умножения - массив весовых коэффициентов фильтра сжатия по дальности и для всех доплеровских частот, записывается в ОЗУ 22 весовых коэффициентов фильтра сжатия.
На выходе согласованного фильтра формируется отсчеты функции свертки:

где n - номер такта следования отсчетов сигнала Tc на входе/выходе фильтра сжатия, отсчитываемый от начала интервала излучения;
Tc - такт следования отсчетов сигнала на входе/выходе фильтра сжатия, Tc=1/Fc. Частота Fc должна удовлетворять условию Fc≥Fм;
z*(k) - комплексно сопряженные отсчеты функции фазовой модуляции ЗИ;
NЗИ - число отсчетов на интервале длительности ЗИ Тзи;
fдопл - значение ожидаемого доплеровского смещения частоты ОИ;
NR - число тактов Tc от начала цикла приема, соответствующее времени задержки ОИ.
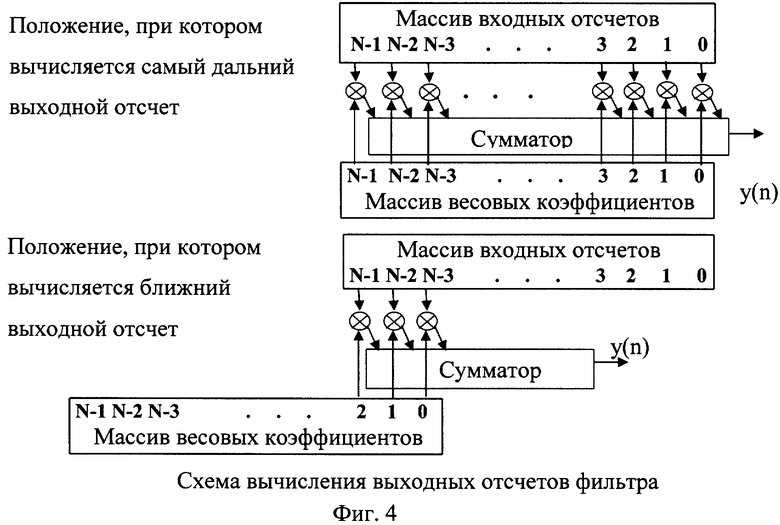
Реализацию формулы (2) проще представить рисунком на фиг.4, где прямоугольниками условно изображены два массива: 1 -и прямоугольник -это регистр с массивом входных отсчетов, 2-й прямоугольник - это регистр с массивом отсчетов импульсной характеристики (весовой функции) фильтра. 1-й прямоугольник неподвижен, 2-й прямоугольник перемещается слева направо (или наоборот) с каждым тактом Tc.
Перед вычислением очередного выходного отсчета прямоугольник устанавливается на место, соответствующее времени прихода отраженного импульса с данного расстояния. Каждый выходной отсчет получается путем вычисления суммы произведений отсчетов в перекрывающихся частях прямоугольников. Таким образом, в вычислениях участвуют только те весовые коэффициенты, которые соответствуют отсчетам сигнала, поступающим с соответствующей дальности, т.е. фильтр является адаптивным по отношению к обрабатываемым сигналам с разных дальностей. Обработка данных, считываемых из буферного ОЗУ 19 в блок 21, состоит в их умножении на весовые коэффициенты, поступающие из ОЗУ 22 и суммировании произведений на интервале, определенным порядком (числом отсчетов) весовой функции фильтра сжатия.
После суммирования произведений и завершения цикла накопления квадратурные составляющие передаются в блок детектирования 23, где осуществляется вычисление амплитуд выходного сигнала в каждом канале дальности по формуле: 
Анализ амплитудного рельефа на плоскости "задержка-доплеровская частота" позволяет по максимальной амплитуде определить задержку ОИ, т.е. расстояние до цели, и доплеровское смещение, т.е. радиальную скорость цели. На приводимых ниже графиках амплитудных рельефов и характеристик частотной

В подтверждение достижения поставленных целей при использовании данного способа было проведено моделирование с применением системы Matlab. При моделировании были взяты следующие исходные параметры: длительность ЗИ и интервал приема ОИ Tзи=5 мс; значение девиации частоты Fдев=200 кГц; число участков в ЗИ разной длительности М=11; длительность первого участка T1=0,5 мс; длительность остальных участков первоначально определялась выражением Tm=Т1λm-1 с последующим округлением, кратным такту следования отсчетов Tc. Значение λ=0,9807; частота дискретизации ОИ и частота следования комплексных сигналов на выходе приемника Fд=Fc=500 кГц (такт Tс=2 мкс); число каналов дальности NR=ТзиFc=2500.
За счет квазислучайной фазовой модуляции, спектр которой при моделировании был ограничен Vi частоты дискретизации (250 кГц) коэффициент сжатия сигнала (база сигнала) составил значение Б=ТзиFд=1250.
В согласованном фильтре отраженный импульс с длительностью Tои=5 мс сжимается до длительности Tcж=Tзи/Б=4 мкс. Это значение может являться оценкой разрешающей способности во всем диапазоне дальности. Результаты моделирования представлены графиками амплитудных рельефов сигналов на выходах согласованных фильтров.
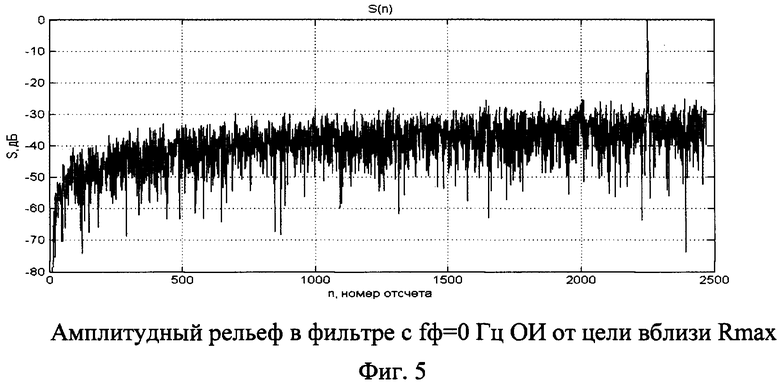
На фиг.5 изображен амплитудный рельеф сжатого сигнала на выходе фильтра с нулевой частотой настройки (fф=0 Гц), отраженного от неподвижной цели, находящейся вблизи максимальной дальности (Rmax).
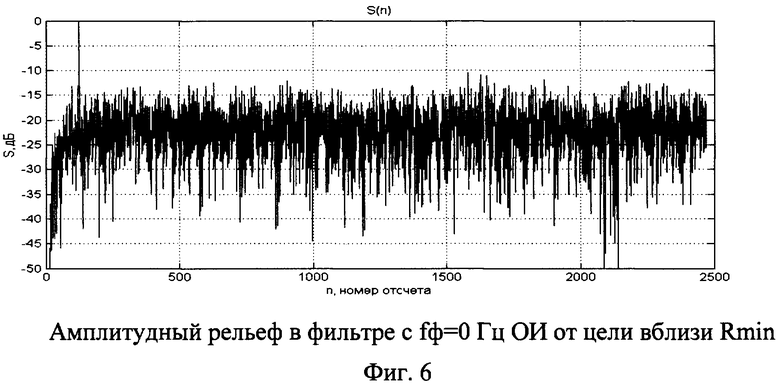
На фиг.6 изображен амплитудный рельеф сигнала в том же фильтре от неподвижной цели, находящейся вблизи минимальной дальности.
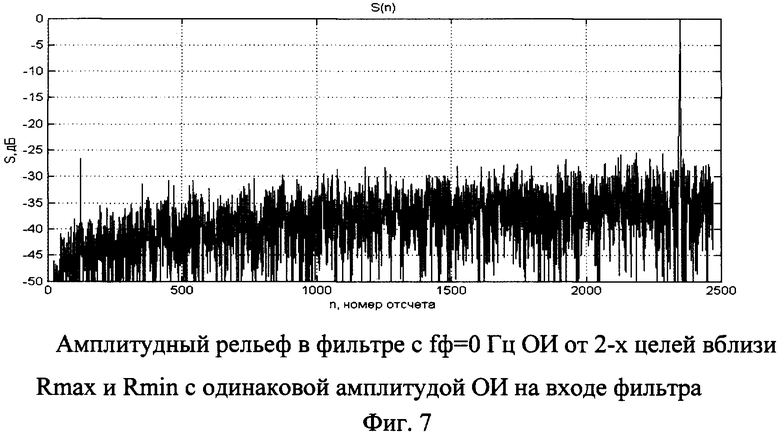
На фиг.7 изображен на выходе фильтра с fф=0 Гц рельеф двух сжатых ОИ от неподвижных целей, находящихся вблизи минимальной и максимальной дальности. Амплитуды обоих ОИ на входе фильтров сжатия были заданы одинаковыми. На выходе фильтра ближней дальности амплитуда сигнала, как и ожидалось, примерно на 25 дБ меньше амплитуды сигнала с большей дальности за счет уменьшения длительности импульса и, соответственно, уменьшение порядка фильтра.
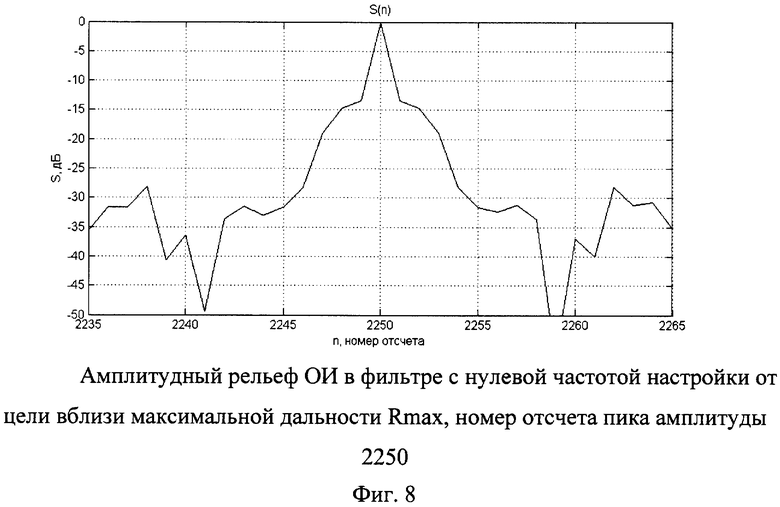
На фиг.8 в увеличенном масштабе изображен рельеф ОИ от неподвижной цели вблизи максимальной дальности. Длительность импульса по основанию в -14 дБ составляет 2 отсчета частоты дискретизации, т.е. 4 мкс. Номер отсчета канала дальности (пика амплитуды) 2250.
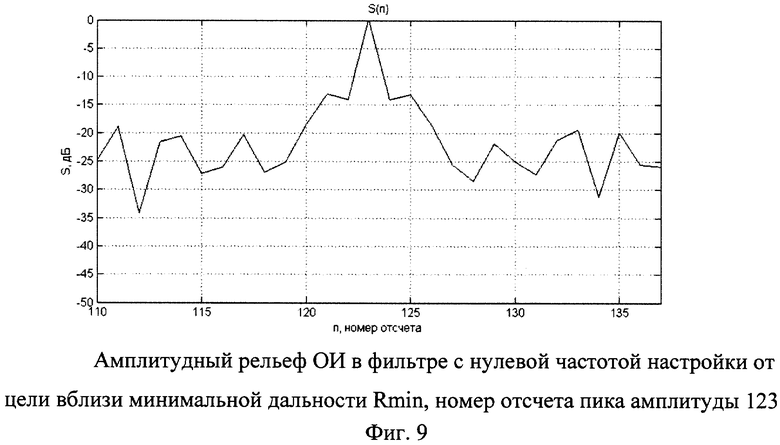
На фиг.9 в увеличенном масштабе представлен рельеф ОИ от неподвижной цели вблизи минимальной дальности. Длительность импульса по основанию в -14 дБ также составляет 2 отсчета частоты дискретизации, т.е. 4 мкс. Номер отсчета пика амплитуды 123.
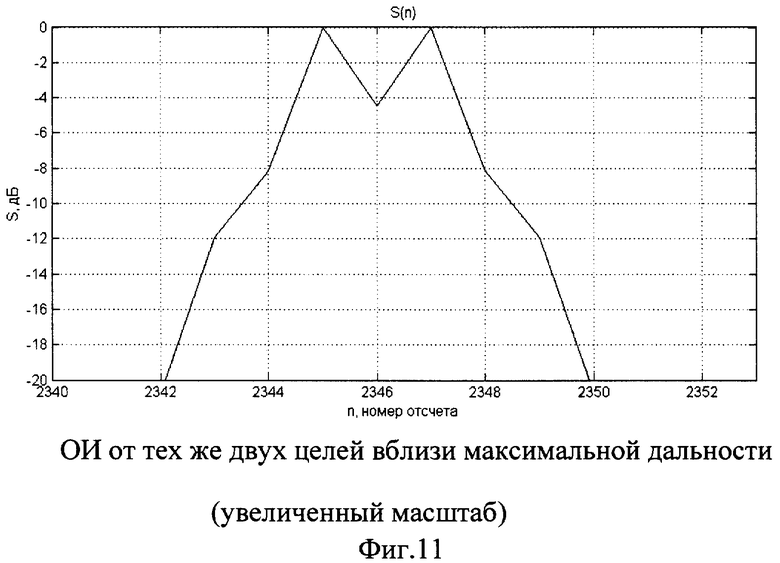
На фиг.10 и 11 в разных масштабах изображены рельефы сжатых ОИ от двух неподвижных целей, находящихся вблизи максимальной дальности и разнесенных друг от друга по времени на 2 отсчета. Четко видны пики амплитуд, расстояние между которыми составляет 4 мкс. Это значение разрешающей способности по времени (по дальности).
На фиг.12 и 13 изображены рельефы сжатых ОИ от двух неподвижных целей, находящихся вблизи минимальной дальности и разнесенных друг от друга по времени также на 2 отсчета. Видно, что расстояние между двумя пиками амплитуд составляет 4 мкс. То есть, на минимальной дальности разрешающая способность по дальности такая же, как и на максимальной.
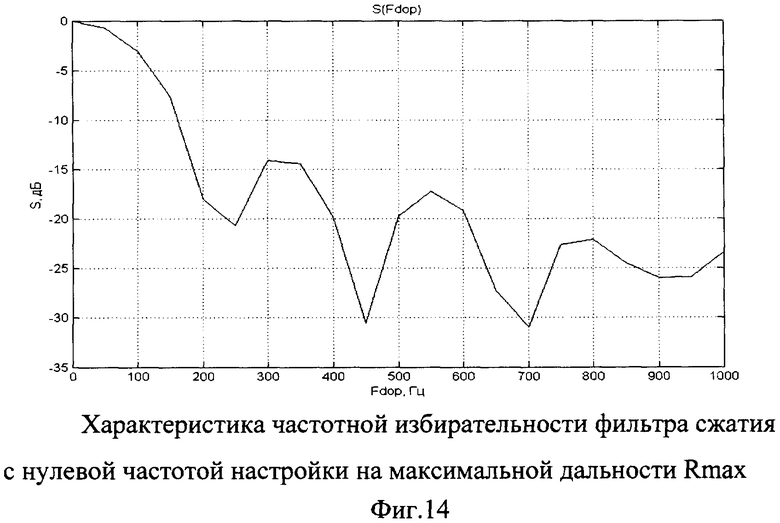
На фиг.14 изображена характеристика частотной избирательности фильтра сжатия для сигнала, отраженного от цели с максимальной дальности с нулевой частотой настройки в диапазоне положительных доплеровских частот от 0 до 1 кГц. Полная полоса фильтра по уровню -3 дБ составляет 200 Гц.
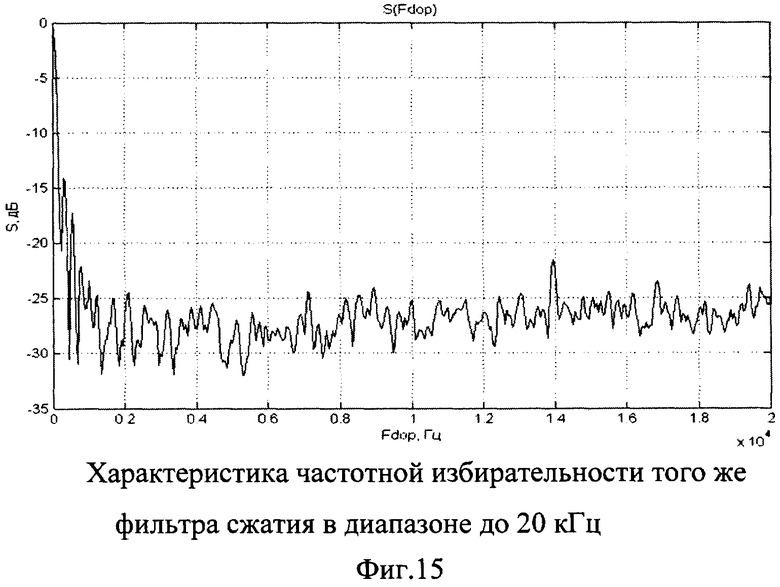
На фиг.15 изображена та же характеристика частотной избирательности в диапазоне частот от 0 до 20 кГц.
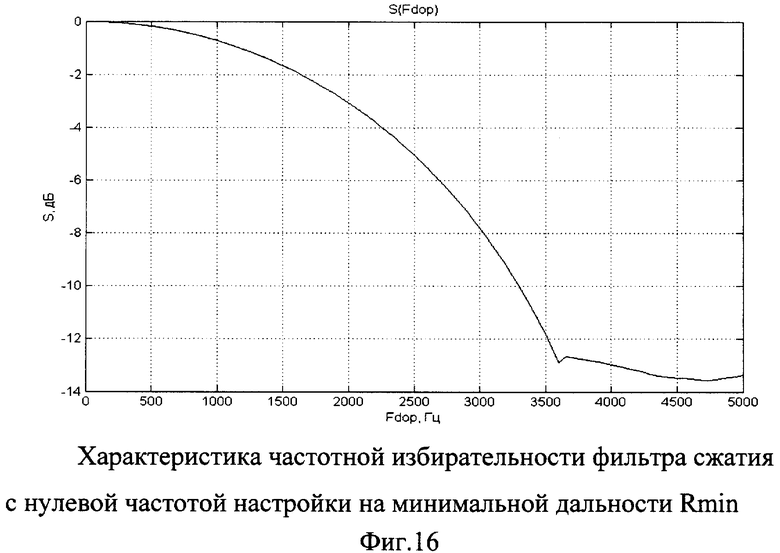
На фиг.16 изображена характеристика частотной избирательности фильтра сжатия для сигнала, отраженного от цели на минимальной дальности с нулевой частотой настройки в диапазоне положительных доплеровских частот от 0 до 5 кГц. Полная полоса фильтра по уровню -3 дБ составляет 4 кГц.
На фиг.17 изображена та же характеристика частотной избирательности в диапазоне частот от 0 до 20 кГц.
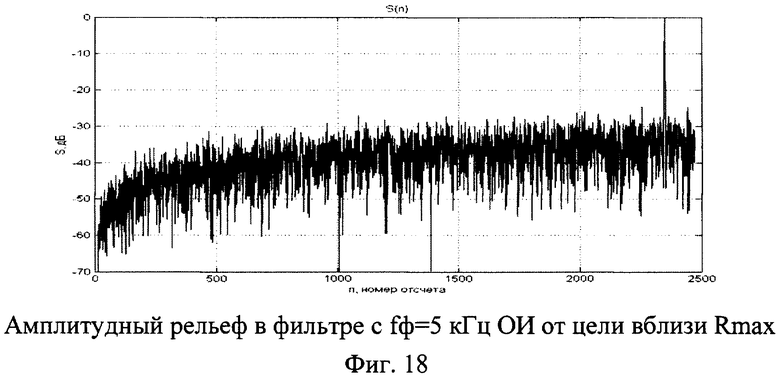
На фиг.18 изображен амплитудный рельеф в фильтре с частотой настройки fф=5 кГц отраженного импульса от движущейся цели, находящейся вблизи Rmax.
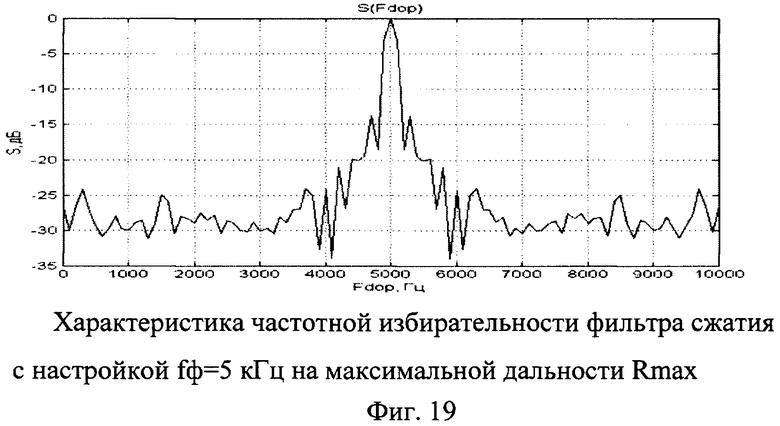
На фиг.19 и 20 в разных масштабах изображена характеристика частотной избирательности фильтра сжатия с настройкой fф=5 кГц для движущейся цели, находящейся на максимальной дальности. Видно, что, как и на фиг.14, полоса пропускания по уровню -3 дБ, составляет 200 Гц.
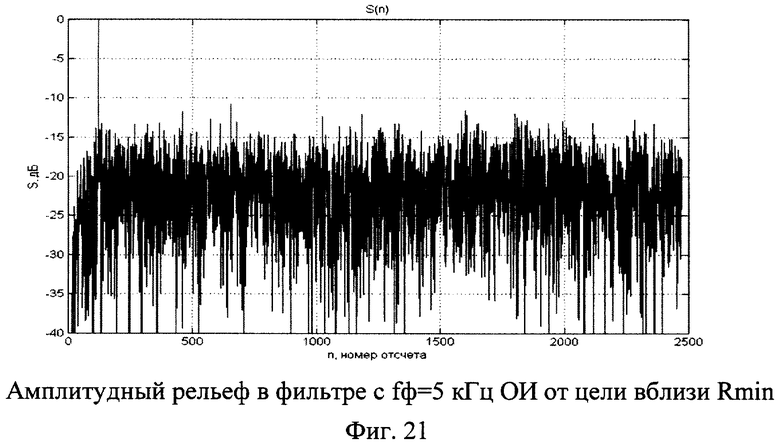
На фиг.21 представлен амплитудный рельеф в фильтре с Гф=5 кГц отраженного импульса от движущейся цели, находящейся вблизи Rmin.
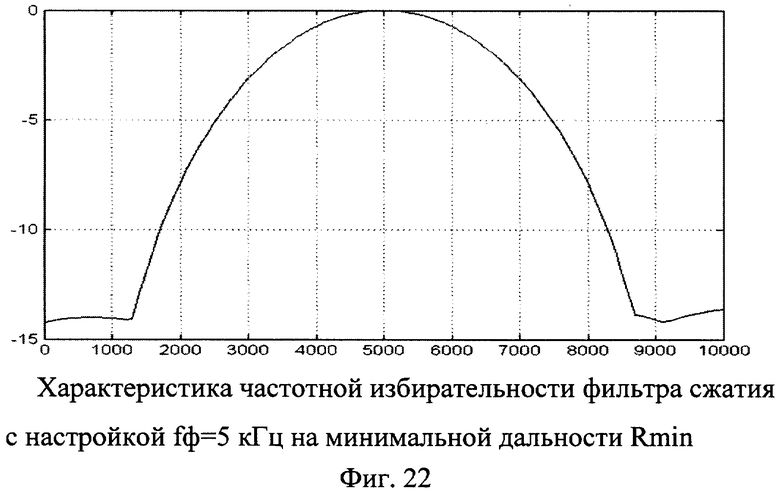
На фиг.22 изображена характеристика частотной избирательности фильтра сжатия с настройкой Гф=5 кГц для движущейся цели, находящейся на минимальной дальности. Видно, что, как и на фиг.14, полоса пропускания по уровню -3 дБ составляет 4 кГц.
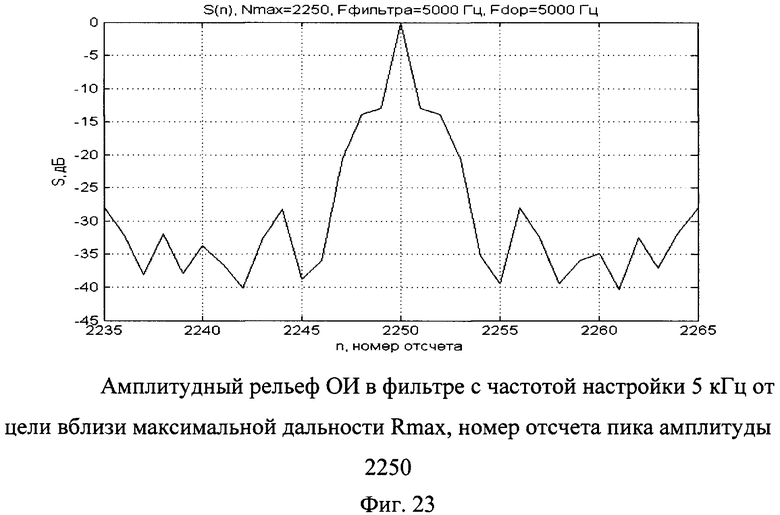
На фиг.23 изображен амплитудный рельеф ОИ в фильтре с частотой настройки 5 кГц от движущейся цели вблизи максимальной дальности. Видно, что сигнал выделился в том же канале дальности с номером отсчета пика амплитуды 2250, как это было и в фильтре с Гф=0 Гц (см. фиг.8).
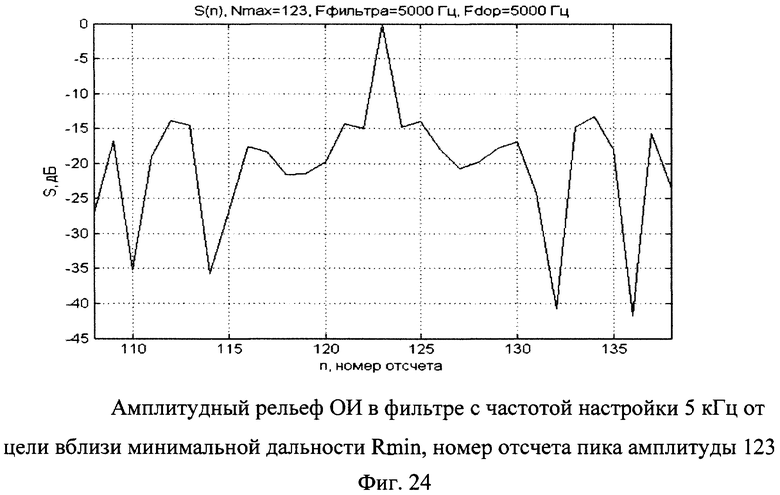
На фиг.24 изображен амплитудный рельеф ОИ в фильтре с частотой настройки 5 кГц от движущейся цели вблизи минимальной дальности с номером отсчета пика амплитуды 123, как это было и в фильтре с Гф=0 Гц (см. фиг.9).
Таким образом, предлагаемый способ, заключающийся в формировании зондирующего составного квазислучайного фазомодулированного моноимпульса и обработке отраженных импульсов, длительность которых меньше или равна длительности зондирующего импульса, согласованными фильтрами сжатия обеспечит обнаружение отраженных сигналов во всем диапазоне дальностей и доплеровских частот и измерение расстояний до объектов с постоянной конструктивно заданной разрешающей способностью без доплеровской ошибки независимо от местоположения целей по дальности, а также обеспечит одновременное измерение доплеровских смещений частоты.
Литература
1. Теоретические основы радиолокации, учебник под ред. Ширмана Я.Д, стр.120, 128, 135, "Войска ПВО страны", 1968 г;
2. Справочник по радиолокации, т.3, под ред. М. Сколника, стр.400, 403, 383, М. "Советское радио", 1979 г;
3. FM radar apparatus: Пат.5905458 США, МПК6 G01S 13/42 / Ashihara J.; Honda Giken Kogyo K, K - №08/974013; Заявл. 19.11.97; Опубл. 18.5.99; Приор. 19.11.96, №8-308440 (Япония): НПК 34270.
4. "Бортовые радиолокационные системы" под ред. Д. Повейсила, Р. Ровена, П. Уотермана, Воениздат МО СССР, Москва, 1964 г., стр.317-320.
5. "Способ измерения дальности". Патент РФ, №2145092, G01S 13/02, М, 27.01.2000, авторы Бабичев В.А.; Ривес Л.С.; Риман А.И.; Сирота О.А.; Дубинский М.Л.; Гринберг В.Б.; Синицына О.С.





Изобретение относится к радиолокационной технике и может быть использовано для обнаружения и измерения расстояний до неподвижных и подвижных объектов и для измерения радиальной скорости объектов. Достигаемый технический результат - измерение расстояний до целей с постоянной разрешающей способностью во всем диапазоне дальности и одновременное измерение радиальных скоростей целей при излучении одного модулированного импульса и при приеме отраженных импульсов, длительность которых может быть меньше длительности зондирующего импульса. Указанный результат достигается за счет того, что излучаемый импульс состоит из нескольких временных участков с последовательно уменьшающейся длительностью, внутри каждого временного участка формируется квазислучайная фазомодулированная последовательность гармонических отсчетов сигнала, которые затем преобразуются в напряжение, которое пропускается через фильтр нижних частот (ФНЧ), формирующий полосу частот модуляции ΔFм, с выхода фильтра сигнал переносится на несущую частоту, усиливается по мощности и передается в антенну на излучение, принимаемые антенной отраженные импульсы усиливаются, фильтруются на несущей частоте полосовым фильтром с полосой пропускания ΔFм, дискретизируются по времени с частотой Fд≥2ΔFм и квантуются по уровню аналого-цифровым преобразователем, сформированные отсчеты переносятся на нулевую частоту путем цифрового квадратурного гетеродинирования комплексной синусоидой с частотой ΔFм/2, затем фильтруются цифровым квадратурным ФНЧ, отсчеты на выходе которого формируются с частотой следования Fc≥ΔFм и затем обрабатываются фильтром сжатия, импульсная характеристика которого по длительности, по функции фазовой модуляции и по ожидаемому доплеровскому сдвигу частоты согласуется с отраженным импульсом, при этом задержка полученной на выходе фильтра максимальной амплитуды сигнала относительно начала цикла приема соответствует расстоянию до обнаруженной цели, а частота импульсной характеристики, при которой получена максимальная амплитуда, соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью. 24 ил.
Способ измерения в радиолокационных устройствах расстояний и радиальных скоростей целей с постоянной разрешающей способностью по дальности во всем диапазоне дальности, заключающийся в излучении в цикле излучения одного длинного импульса с квазислучайной фазовой модуляцией и обработке отраженных от целей импульсов в цикле приема согласованным фильтром сжатия, отличающийся тем, что излучаемый импульс формируется в виде цифровой последовательности комплексных отсчетов сигнала на нескольких временных участках, следующих слитно друг за другом с последовательно уменьшающейся длительностью, внутри каждого участка сигнал является частотно-модулированным с изменением частоты модуляции от нуля до частоты девиации Fдев, отсчеты сигнала вычисляются с частотой дескретизации Fф≥2Fдев, вычисленные отсчеты на каждом участке переставляются по времени в пределах участка, образуя таким образом вектор квазислучайной фазомодулированной последовательности отсчетов; с началом цикла излучения эта последовательность преобразуется цифроаналоговым преобразователем в последовательность импульсов напряжения, которая пропускается через фильтр нижних частот, ограничивающий полосу частот сигнала полосой Fф≥2Fдев, с выхода фильтра нижних частот сигнал переносится на несущую частоту f0, усиливается по мощности и через антенный переключатель передается в антенну на излучение; принимаемые антенной в цикле приема отраженные от целей импульсы усиливаются, фильтруются на несущей частоте f0 полосовым фильтром с полосой пропускания ΔFм, дискретизируются по времени с частотой Fд≥2ΔFм с выполнением условия f0=nFд+ΔFм/2, n=1, 2, 3, …, и квантуются по уровню аналого-цифровым преобразователем, затем действительные цифровые отсчеты отраженных сигналов путем цифрового квадратурного гетеродинирования переносятся на нулевую частоту, комплексные результаты гетеродинирования пропускаются через цифровой комплексный фильтр нижних частот с полосой пропускания ΔFм, на выходе фильтра нижних частот формируется последовательность комплексных отсчетов с частотой следования Fc≥ΔFм, которые затем обрабатываются фильтром сжатия, импульсная характеристика которого по длительности, по функции фазовой модуляции и по ожидаемым доплеровским сдвигам частоты согласована с отраженным импульсом; при этом задержка полученной на выходе фильтра максимальной амплитуды сигнала относительно начала цикла приема соответствует расстоянию до обнаруженной цели, а частота импульсной характеристики, при которой получена максимальная амплитуда, соответствует доплеровскому смещению частоты цели, однозначно связанному с ее радиальной скоростью.
| Теоретические основы радиолокации /Под ред | |||
| Я.Д | |||
| ШИРМАНА | |||
| Войска ПВО страны, 1968, с.120, 128, 135 | |||
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ВЫСОКОГО РАЗРЕШЕНИЯ С АКТИВНОЙ ФАЗИРОВАННОЙ РЕШЕТКОЙ ДЛЯ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2429990C1 |
| US 6111536 A, 29.08.2000 | |||
| US 6426717 B1, 30.07.2002 | |||
| US 6121915 A, 19.09.2000 | |||
| WO 2008080739 A1, 10.07.2008. | |||

