Изобретение относится к системам для обнаружения объектов путем отражения от его поверхности радиоволн и может быть использовано в радиолокации для распознавания класса цели.
Известен способ распознавания, заключающийся в излучении в сторону цели электромагнитной энергии, приеме отраженной от цели электромагнитной энергии, распознавании цели по ее принятому изображению [1].
Известно устройство для радиолокационного распознавания целей, содержащее антенну, передатчик, приемник, антенный переключатель и канал распознавания, причем передатчик содержит модулятор, генератор СВЧ и первый ключ, где выход модулятора соединен с первым входом первого ключа и первым выходом передатчика, выход генератора СВЧ соединен со вторым входом первого ключа и вторым выходом передатчика, выход первого ключа является третьим выходом передатчика и соединен с первым входом антенного переключателя, второй вход которого соединен с антенной, а выход со входом приемника; канал распознавания содержит последовательно соединенные линию задержки, второй ключ, смеситель, фильтр низких частот и устройство воспроизведения образа цели, причем вход линии задержки является первым входом канала распознавания и соединен с первым выходом передатчика, второй вход смесителя является вторым входом канала распознавания и соединен со вторым выходом передатчика, второй вход второго ключа является третьим входом канала распознавания и соединен со вторым выходом приемника, первый выход передатчика и выход приемника соединены со входами индикатора кругового обзора РЛС [2].
Недостатками данных способа и устройства является низкая информативность, обусловленная отсутствием возможности распознавания протяженной по дальности цели. На практике подавляющее большинство реальных объектов относится к классу сложных радиолокационных целей. Погрешности измерения координатных параметров, вызванных шумом цели, начинают возникать, когда физические размеры цели превышают 0,01 величины элемента разрешения по какой-либо координате [3].
Практика показывает, что с уменьшением дальности до цели ее следует считать протяженной. Таким образом, находя отношение физических размеров цели к величине элемента разрешения по данной координате, можно судить о протяженности цели по данной координате. Величина элемента разрешения по дальности определяется длительностью зондирующего сигнала τз. При отражении от цели длительность отраженного сигнала τо увеличивается на величину Δτ, пропорциональную размерам цели по дальности. По величине отношения β=Δτ/τз можно судить о протяженности по дальности цели. Так при β<0,01 принимают решение о точечной по дальности цели, а при β≥0,01 принимают решение о протяженной по дальности цели.
Наиболее близким к изобретению является способ распознавания протяженной по дальности цели, заключающийся в излучении в сторону цели электромагнитной энергии, приеме отраженной от цели электромагнитной энергии, измерении длительности сигнала, отраженного от цели τ0, определении увеличения длительности отраженного сигнала Δτ=τo-τз, определении отношения β=Δτо/τз, при этом если β<0,01 принимают решение о точечной по дальности цели, если β≥0,01 принимают решение о протяженной по дальности цели [4].
Наиболее близким к изобретению является устройство, которое содержит передатчик, антенный переключатель, антенну, приемник и канал распознавания, при этом передатчик содержит модулятор, генератор СВЧ и первый ключ, причем выход модулятора соединен с первым входом первого ключа и первым выходом передатчика, выход генератора СВЧ соединен со вторым входом первого ключа и вторым выходом передатчика, выход первого ключа является третьим выходом передатчика и соединен с первым входом антенного переключателя, второй вход которого соединен с антенной а выход со входом приемника, канал распознавания содержит последовательно соединенные первую линию задержки, второй ключ и смеситель, причем вход первой линии задержки является первым входом канала распознавания и соединен с первым выходом передатчика, второй вход смесителя является вторым входом канала распознавания и соединен со вторым выходом передатчика, второй вход второго ключа является третьим входом канала распознавания и соединен с выходом приемника, первый выход передатчика и выход приемника соединены со входами индикатора кругового обзора РЛС, дополнительно канал распознавания содержит последовательно соединенные усилитель промежуточной частоты, измеритель длительности сигнала для формирования сигнала, пропорционального длительности сигнала, отраженного от цели τ0, вычитающее устройство для формирования сигнала, пропорционального величине Δτ=τо-τз, делитель для определения сигнала, пропорционального отношению β=Δτ/τз, и пороговое устройство, причем вход усилителя промежуточной частоты соединен с выходом смесителя, а первый и второй выходы порогового устройства являются выходами канала распознавания, соответственно для протяженной по дальности цели при β≥0,01 и для точечной по дальности цели при β<0,01 [4].
Недостатками данных способа и устройства является то, что невозможно определить класс цели: большая цель, средняя цель, малая цель.
Технической задачей изобретения является расширение информативности за счет определения класса цели.
Техническая задача изобретения достигается тем, что в способе распознавания протяженной цели, заключающемся в излучении в сторону цели электромагнитной энергии, приеме отраженной от цели электромагнитной энергии, измерении длительности сигнала, отраженного от цели τ0, определении увеличения длительности отраженного сигнала Δτ=τо-τз, определении отношения β=Δτ/τз, при этом, если β≥0,01 принимают решение о протяженной по дальности цели, если β<0,01 принимают решение о точечной по дальности цели, дополнительно определяют класс цели на основе анализа величины сигнала β=Δτо/τз, при этом, если β удовлетворяет неравенствам β>β1, β≤β2, принимают решение, что цель малая, если удовлетворяет неравенствам β>β2 и β≤β3, принимают решение, что цель средняя, если удовлетворяет неравенству β>β3 принимают решение, что цель большая, предлагаемые неравенства однозначно определяют класс цели при следующих значениях величин «β1=0,05», «β2=0,25» и «β3=0,40».
Заявленный способ реализуется в устройстве распознавания протяженной цели, содержащем передатчик, антенный переключатель, антенну, приемник, канал распознавания, при этом первый, второй и третий выходы передатчика соединены соответсвенно с первым и вторыми входами канала распознавания, и первым входом антенного переключателя, второй вход-выход антенного переключателя соединен с выходом-входом антенны, а выход со входом приемника, выход которого соединен с третьим входом канала распознавания, передатчик содержит модулятор, генератор СВЧ и первый ключ, причем выход модулятора соединен с первым входом первого ключа, выход генератора СВЧ соединен со вторым входом первого ключа, выходы модулятора, генератора СВЧ и первого ключа являются соответсвенно первым, вторым и третьим выходом передатчика, канал распознавания содержит последовательно соединенные линию задержки, второй ключ, смеситель, усилитель промежуточной частоты, измеритель длительности сигнала, вычитающее устройство, делитель, пороговое устройство, причем измеритель длительности сигнала формирует сигнал, пропорциональный длительности сигнала, отраженного от цели τ0, вычитающее устройство формирует сигнал, пропорциональный величине Δτ=τо-τз, делитель формирует сигнал, пропорциональный отношению β=Δτ/τз, первым, вторым и третьим входами канала распознавания, являются соответственно вход линии задержки, вторые входы смесителя и второго ключа, а первый и второй выходы порогового устройства являются первым и вторым выходами канала распознавания, первый выход передатчика и выход приемника соединены со входами индикатора кругового обзора РЛС, дополнительно введены блок определения класса цели и индикатор «малая цель», индикатор «средняя цель», индикатор «большая цель», при этом второй выход канала распознавания соединен с входом блока определения класса цели, первый, второй и третий выходы которого соединены соответственно с входом индикатора «малая цель», индикатора «средняя цель», индикатора «большая цель», блок определения классса цели содержит первое, второе, третье пороговые устройства, первый и второй элементы НЕ, первый и второй элементы И, задатчик сигналов при этом входом блока определения классса цели являются вторые входы первого, второго и третьего пороговых устройств, первые входы которых соединены с выходами задатчика сигналов, причем в зависимости от величины β=Δτ/τз в случае если β удовлетворяет неравенствам β>β1, β≤β2, происходит срабатывания первого порогового устройства и при этом сигнал с его выхода поступает на первый вход первого элемента И, на второй и третий входы которого поступают сигналы с выходов второго и третьего пороговых устройств соответственно через первый и второй элементы НЕ, в случае если β удовлетворяет неравенствам β>β2 и β≤β3, происходит срабатывания второго порогового устройства, с выхода которого сигнал поступает на первый вход второго элемента И, на второй вход которого поступает сигнал с выхода третьего порогового устройства через второй элемент НЕ, в случае если β удовлетворяет неравенству β>β3 срабатывает третье пороговое устройство, предлагаемые неравенства однозначно определяют класс цели при следующих значениях величин «β1=0,05», «β2=0,25» и «β3=0,40», выходы первого, второго элементов И и третьего порогового устройства являются соответственно первым, вторым и третьим выходами блока определения класса цели.
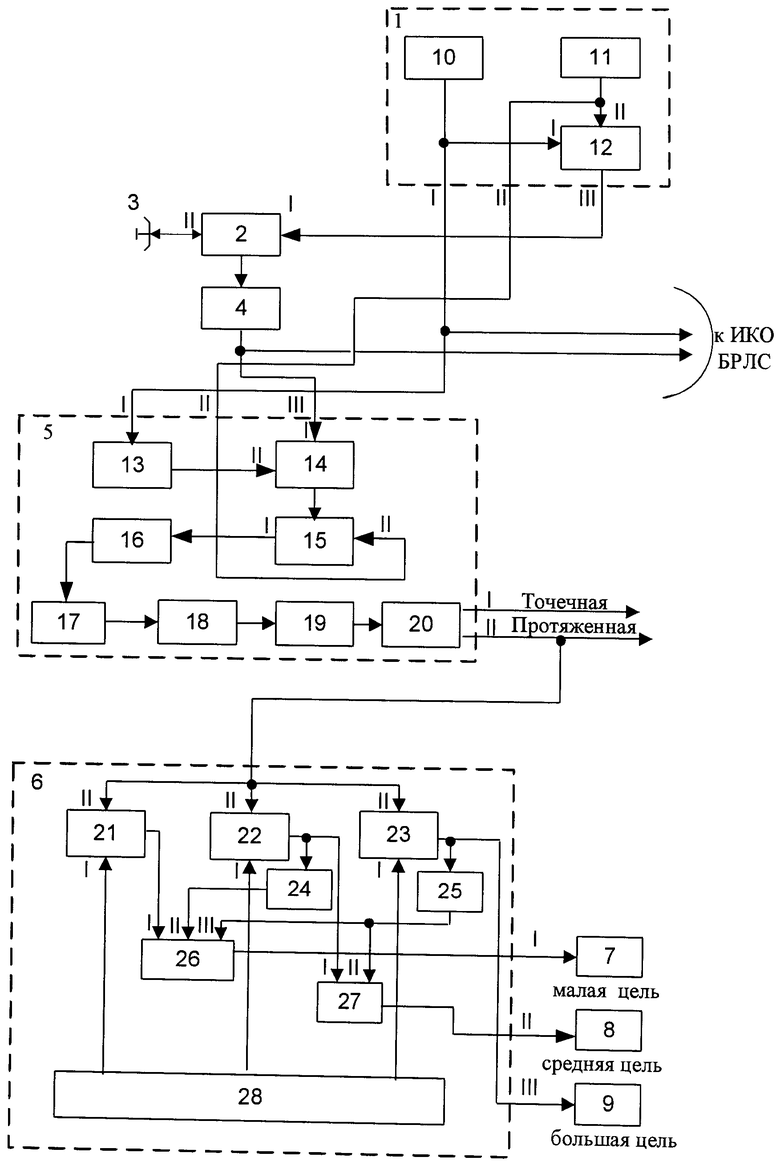
На чертеже приведена функциональная схема устройства распознавания класса цели, где 1 - передатчик; 2 - антенный переключатель; 3 - антенна; 4 - приемник; 5 - канал распознавания; 6 - блок определения класса цели, 7 - индикатор «малая цель», 8 - индикатор «средняя цель», 9 - индикатор «большая цель».
Определение геометрических размеров целей требует наличия радиолокационной станции с высокой разрешающей способностью по дальности менее 1 м. Реализация указанной разрешающей способности возможна либо за счет применения немодулированных импульсных сигналов очень малой длительности, либо за счет сигналов с внутриимпульсной модуляцией. Немодулированные сигналы очень малой длительности (единицы - десятки наносекунд) иногда называют сверхширокополосными сигналами (СШПС). Многочастотные РЛС со СШПС обеспечивают разрешающую способность в единицы сантиметров и определение радиолокационных характеристик объектов на удалении до единиц километров [Астанин Л.Ю., Костылев А.А. Методы теоретического и экспериментального нестанционарного рассеяния и излучения электромагнитных волн. - Зарубежная радиоэлектроника, 1981, №9, С.3-37].
Указанная дальность действия является приемлемой для распознавания целей на конечном участке радиолокационными головками самонаведения авиационных управляемых ракет. Длительность отраженного сигнала определяют в зависимости от класса цели: малая цель (5 м), средняя цель (25 м), большая цель (40 м). Данное обстоятельство является информативным признаком для определения класса цели на малых дальностях до цели. Исходя из геометрических размеров целей, величины значений β определяются в соответствии с выражениями:
Устройство распознавания класса цели содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4 и канал распознавания 5, блок 6 определения класса цели, индикатор 7 «малая цель», индикатор 8 «средняя цель, индикатор 9 «большая цель», при этом первый, второй и третий выходы передатчика 1 соединены соответсвенно с первым и вторыми входами канала 5 распознавания, и первым входом антенного переключателя 2, второй вход-выход которого соединен с выходом-входом антенны 3, а выход со входом приемника 4, выход которого соединен с третьим входом канала 5 распознавания, передатчик 1 содержит модулятор 10, генератор СВЧ 11 и первый 12 ключ, причем выход модулятора 10 соединен с первым входом первого 12 ключа, выход генератора 11 СВЧ соединен со вторым входом первого 12 ключа, выходы модулятора 10, генератора 11 СВЧ и первого 12 ключа являются соответсвенно первым, вторым и третьим выходом передатчика 1, канал 5 распознавания содержит последовательно соединенные линию 13 задержки, второй 14 ключ, смеситель 15, усилитель 16 промежуточной частоты, измеритель 17 длительности сигнала, вычитающее устройство 18, делитель 19, пороговое устройство 20, причем измеритель 17 длительности сигнала формирует сигнал, пропорциональный длительности сигнала, отраженного от цели τ0, вычитающее устройство 18 формирует сигнал, пропорциональный величине Δτ=τo-τз, делитель 19 формирует сигнал, пропорциональный отношению β=Δτ/τз, первым, вторым и третьим входами канала 5 распознавания, являются соответственно вход линии 13 задержки, вторые входы смесителя 15 и второго 14 ключа, а первый и второй выходы порогового устройства 20 являются первым и вторым выходами канала 5 распознавания, первый выход передатчика 1 и выход приемника 4 соединены со входами индикатора кругового обзора РЛС, второй выход канала 5 распознавания соединен с входом блока 6 определения класса цели, первый, второй и третий выходы которого соединены соответственно с входом индикатора 7 «малая цель», индикатора 8 «средняя цель», индикатора 9 «большая цель», блок 6 определения классса цели содержит первое 21, второе 22, третье 23 пороговые устройства, первый 24 и второй 25 элементы НЕ, первый 26 и второй 27 элементы И, задатчик 28 сигналов при этом входом блока 6 определения классса цели являются вторые входы первого 21, второго 22 и третьего 23 пороговых устройств, первые входы которых соединены с выходами задатчика 28 сигналов, причем в зависимости от величины β=Δτ/τз в случае если β удовлетворяет неравенствам β>β1, β≤β2, происходит срабатывания первого 21 порогового устройства и при этом сигнал с его выхода поступает на первый вход первого 26 элемента И, на второй и третий входы которого поступают сигналы с выходов второго 22 и третьего 23 пороговых устройств соответственно через первый 24 и второй 25 элементы НЕ, в случае если β удовлетворяет неравенствам β>β2 и β≤β3, происходит срабатывания второго 22 порогового устройства, с выхода которого сигнал поступает на первый вход второго 27 элемента И, на второй вход которого поступает сигнал с выхода третьего 23 порогового устройства через второй 25 элемент НЕ, в случае если β удовлетворяет неравенству β>β3 срабатывает третье 23 пороговое устройство, выходы первого 26, второго 27 элементов И и третьего 23 порогового устройства являются соответственно первым, вторым и третьим выходами блока 6 определения класса цели.
Устройство функционирует следующим образом. Отраженный от движущейся цели сигнал поступает на вход антенны 3 и через антенный переключатель 2, приемник 4 и второй 14 ключ поступает на первый вход смесителя 15. На второй вход смесителя 15 поступает сигнал с выхода генератора 11 СВЧ, таким образом, на выходе смесителя 15 получается сигнал на промежуточной частоте. Этот сигнал поступает через усилитель промежуточной частоты 16 на вход измерителя 17 длительности, на выходе которого формируется сигнал, пропорциональный длительности сигнала, отраженного от цели τ0. Данный сигнал поступает на вход вычитающего устройства 18, на выходе которого формируется сигнал, пропорциональный выражению Δτ=τо-τз, который поступает на вход делителя 19. На выходе делителя 19 формируется сигнал, пропорциональный β=Δτ/τз. Значение длительности зондирующего сигнала г, введено в делитель 19 в качестве константы. Сигнал с выхода делителя 19, пропорциональный величине β=Δτ/τз, поступает на вход порогового устройства 20, где сравнивается с порогом, равным 0,01. При превышении порога выдается сигнал «протяженная», в противоположном случае выдается сигнал «точечная». Данные сигналы являются выходными сигналами канала 5 распознавания.
Со второго выхода канала 5 распознавания сигнал поступает на вторые входы первого 21, второго 22 и третьего 23 пороговых устройств, на первые входы которых поступают сигналы с выхода задатчика 28 сигналов.
Длительность отраженного сигнала определяют в зависимости от класса цели: малая цель (5 м), средняя цель (25 м), большая цель (40 м). Данное обстоятельство является информативным признаком для определения класса цели на малых дальностях до цели. Исходя из геометрических размеров целей, величины значений β определяются в соответствии с выражениями:
В зависимости от величины β=Δτ/τз в случае если β удовлетворяет неравенствам β>β1, β≤β2, происходит срабатывания первого 21 порогового устройства и при этом сигнал с его выхода поступает на первый вход первого 26 элемента И, на второй и третий входы которого поступают сигналы с выходов второго 22 и третьего 23 пороговых устройств соответственно через первый 24 и второй 25 элементы НЕ, с выхода первого элемента И 26 сигнал поступает на индикатор 7 «малая цель».
В случае если β удовлетворяет неравенствам β>β2 и β≤β3, происходит срабатывание второго 22 порогового устройства, с выхода которого сигнал поступает на первый вход второго 27 элемента И, на второй вход которого поступает сигнал с выхода третьего 23 порогового устройства через второй 25 элемент НЕ, с выхода второго 27 элемента И сигнал поступает на вход индикатора 8 «средняя цель».
В случае если β удовлетворяет неравенству β>β3, срабатывает третье 23 пороговое устройство и сигнал с его выхода поступает на вход индикатора 9 «большая цель».
Таким образом определяется класс цели на основе анализа отношений величин длительности отраженного от цели и зондирующего сигналов.
Источники информации
1. Патент США №3978480, кл. G01S 9/00, 1974 г.
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984 г., с.36.
3. Радиолокационные характеристики летательных аппаратов / М.Е. Варганов, Ю.С. Зиновьев, Л.Ю. Астанин и др.; Под ред. Л.Т. Тучкова. - М.: Радио и связь, 1985. - 236 с. ил. с.17-18.
4. Винокуров В.И., Винокуров Д.В., патент РФ №2410713 от 27.01.2011, МПК G01S 13/50 (2006.01).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492503C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2006 |
|
RU2317569C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| СПОСОБ УПРАВЛЕНИЯ ХАРАКТЕРИСТИКАМИ ПОЛЯ ПОРАЖЕНИЯ ОСКОЛОЧНО-ФУГАСНОЙ БОЕВОЙ ЧАСТИ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2484419C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2007 |
|
RU2344969C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2006 |
|
RU2312296C1 |
Изобретение может быть использовано в радиолокации для распознавания класса цели. Достигаемый технический результат - расширение информативности. Указанный результат достигается за счет обеспечения возможности распознавания класса цели путем анализа величины сигнала β=Δτо/τз, при этом если β удовлетворяет неравенствам β>β1, β≤β2, принимают решение, что цель малая, если удовлетворяет неравенствам β>β2 и β≤β3, принимают решение, что цель средняя, если удовлетворяет неравенству β>β3, принимают решение, что цель большая, определяют класс цели на основе анализа величины сигнала β=Δτо/τз при этом если β удовлетворяет неравенствам β>β1, β≤β2, принимают решение, что цель малая, если удовлетворяет неравенствам β>β2 и β≤β3, принимают решение, что цель средняя, если удовлетворяет неравенству β>β3, принимают решение, что цель большая, предлагаемые неравенства однозначно определяют класс цели при следующих значениях величин «β1=0,05», «β2=0,25» и «β3=0,40». Устройство, реализующее способ, содержит передатчик, антенный переключатель, антенну, приемник, канал распознавания, блок определения класса цели и индикатор «малая цель», индикатор «средняя цель», индикатор «большая цель», определенным образом выполненные и соединенные между собой. 2 н.п. ф-лы, 1 ил.
1. Способ распознавания класса цели, заключающийся в излучении в сторону цели электромагнитной энергии, приеме отраженной от цели электромагнитной энергии, измерении длительности сигнала, отраженного от цели τо, определении увеличения длительности отраженного сигнала Δτ=τо-τз, определении отношения β=Δτо/τз, где τз - длительность зондирующего сигнала, при этом, если β<0,01, принимают решение о точечной по дальности цели, если β≥0,01, принимают решение о протяженной по дальности цели, отличающийся тем, что определяют класс цели на основе анализа протяженной по дальности цели, при этом, если β удовлетворяет неравенствам β>β1, β≤β2, принимают решение, что цель малая, если удовлетворяет неравенствам β>β2 и β≤β3, принимают решение, что цель средняя, если удовлетворяет неравенству β>β3, принимают решение, что цель большая, предлагаемые неравенства однозначно определяют класс цели при следующих значениях величин «β1=0,05», «β2=0,25» и «β3=0,40».
2. Устройство распознавания класса цели содержит передатчик, антенный переключатель, антенну, приемник, канал распознавания, при этом первый, второй и третий выходы передатчика соединены соответственно с первым, вторыми входами канала распознавания, и первым входом антенного переключателя, второй вход-выход антенного переключателя соединен с выходом-входом антенны, а выход со входом приемника, выход которого соединен с третьим входом канала распознавания, передатчик содержит модулятор, генератор СВЧ и первый ключ, причем выход модулятора соединен с первым входом первого ключа, выход генератора СВЧ соединен со вторым входом первого ключа, выходы модулятора, генератора СВЧ и первого ключа являются соответственно первым, вторым и третьим выходом передатчика, канал распознавания содержит последовательно соединенные линию задержки, второй ключ, смеситель, усилитель промежуточной частоты, измеритель длительности сигнала, вычитающее устройство, делитель, пороговое устройство, причем измеритель длительности сигнала формирует сигнал, пропорциональный длительности сигнала, отраженного от цели τо, вычитающее устройство формирует сигнал, пропорциональный величине Δτ=τо-τз, делитель формирует сигнал, пропорциональный отношению β=Δτо/τз, первым, вторым и третьим входами канала распознавания, являются соответственно вход линии задержки, вторые входы смесителя и второго ключа, а первый и второй выходы порогового устройства являются первым и вторым выходами канала распознавания, первый выход передатчика и выход приемника соединены со входами индикатора кругового обзора РЛС, отличающееся тем, что введены блок определения класса цели и индикатор «малая цель», индикатор «средняя цель», индикатор «большая цель», при этом второй выход канала распознавания соединен с входом блока определения класса цели, первый, второй и третий выходы которого соединены соответственно с входом индикатора «малая цель», индикатора «средняя цель», индикатора «большая цель», блок определения класса цели содержит первое, второе, третье пороговые устройства, первый и второй элементы НЕ, первый и второй элементы И, задатчик сигналов, при этом входом блока определения класса цели являются вторые входы первого, второго и третьего пороговых устройств, первые входы которых соединены с выходами задатчика сигналов, причем в зависимости от величины β=Δτ/τз в случае, если β удовлетворяет неравенствам β>β1, β≤β2, происходит срабатывания первого порогового устройства, и при этом сигнал с его выхода поступает на первый вход первого элемента И, на второй и третий входы которого поступают сигналы с выходов второго и третьего пороговых устройств соответственно через первый и второй элементы НЕ, в случае, если β удовлетворяет неравенствам β>β2 и β≤β3, происходит срабатывание второго порогового устройства, с выхода которого сигнал поступает на первый вход второго элемента И, на второй вход которого поступает сигнал с выхода третьего порогового устройства через второй элемент НЕ, в случае, если β удовлетворяет неравенству β>β3 срабатывает третье пороговое устройство, предлагаемые неравенства однозначно определяют класс цели при следующих значениях величин «β1=0,05», «β2=0,25» и «β3=0,40», выходы первого, второго элементов И и третьего порогового устройства являются соответственно первым, вторым и третьим выходами блока определения класса цели.
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО ДАЛЬНОСТИ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410713C2 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ | 2004 |
|
RU2261476C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ТОКА | 0 |
|
SU211623A1 |
| US 7154433 В1, 26.12.2006 | |||
| Регулируемый кулачок | 1978 |
|
SU714082A2 |
| US 4647931 А, 03.03.1987. | |||

