Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях обнаружения зенитных комплексов ближнего действия, а также в боевом снаряжении авиационных управляемых ракет.
Известно изобретение - устройство обнаружения движущихся целей, осуществляющее выделение сигналов от воздушных целей, включая вертолеты в режиме висения, при обзоре на фоне мешающих отражений от подстилающей поверхности, которое содержит детектор огибающей, режекторный фильтр, интегратор и первое пороговое устройство (Ю.И.Фельдман и др. Сопровождение движущихся целей. М.: Сов. Радио, 1978, стр.17).
Недостатком устройства является невозможность распознавания воздушных целей, включая вертолеты в режиме висения.
Наиболее близким к изобретению является устройство обнаружения движущихся целей, содержащее последовательно соединенные детектор огибающей, режекторный фильтр, первый линейный детектор, интегратор и первое пороговое устройство, N узкополосных фильтров, N линейных детекторов, схему выбора по максимуму, последовательно соединенные делитель, второе пороговое устройство и инвертор, а также первый и второй элементы И, при этом выход режекторного фильтра соединен с входом каждого из N узкополосных фильтров, выходы которых соединены со входом каждого из N линейных детекторов, выход каждого из которых соединен с соответствующим N входом схемы выбора по максимуму, выход которой соединен с первым входом делителя, второй вход которого соединен с выходом интегратора, выход первого порогового устройства соединен с первыми объединенными входами первого и второго элементов И, а выход второго порогового устройства подключен к вторым входам первого и второго элементов И соответственно непосредственно и через инвертор, вход детектора огибающей является входом устройства, а выходы первого и второго элементов И - соответственно первым и вторым выходами устройства (патент РФ на изобретение №1840156, кл. G01S 13/52, 27.07.2006 г.).
Недостатком данного устройства является невозможность определения типа движущейся цели по динамике ее траекторных изменений в полете.
Цель изобретения - расширение функциональных возможностей за счет определения типа движущейся цели по динамике ее траекторных изменений в полете.
Поставленная цель достигается тем, что в устройство обнаружения движущихся целей, содержащее последовательно соединенные детектор огибающей, режекторный фильтр, первый линейный детектор, интегратор и первое пороговое устройство, N узкополосных фильтров, N линейных детекторов, схему выбора по максимуму, последовательно соединенные делитель, второе пороговое устройство и инвертор, а также первый и второй элементы И, при этом выход режекторного фильтра соединен с входом каждого из N узкополосных фильтров, выходы которых соединены со входом каждого из N линейных детекторов, выход каждого из которых соединен с соответствующим N входом схемы выбора по максимуму, выход которой соединен с первым входом делителя, второй вход которого соединен с выходом интегратора, выход первого порогового устройства соединен с первыми объединенными входами первого и второго элементов И, а выход второго порогового устройства подключен к вторым входам первого и второго элементов И соответственно непосредственно и через инвертор, вход детектора огибающей является входом устройства, а выходы первого и второго элементов И - соответственно первым и вторым выходами устройства, в него дополнительно введены ключ, блок обработки сигналов, N индикаторов сигнализации, при этом блок обработки сигналов состоит из последовательно соединенных N узкополосных фильтров, N линейных детекторов, N интеграторов, N пороговых устройств, причем первый вход ключа соединен с выходом режекторного фильтра, при этом сигнал с выхода режекторного фильтра, пропорциональный динамике траектории движения целей поступает в блок обработки сигналов через один из входов N узкополосных фильтров, N линейных детекторов, N интеграторов, N пороговых устройств на один из входов N индикаторов сигнализации «типа» цели», кроме того, второй вход ключа соединен с выходом первого элемента И.
Существенными отличительными признаками по устройству являются следующие элементы схемы: ключ, блок обработки сигналов, N индикаторов сигнализации «типа цели» и связи между известными и новыми элементами.
Сущность изобретения поясняется чертежом, на котором представлена электрическая схема предлагаемого устройства.
Предлагаемое устройство содержит: последовательно соединенные детектор 1 огибающей, режекторный фильтр 2, первый линейный детектор 3, интегратор 4 и первое пороговое устройство 5, N узкополосных фильтров 6, N линейных детекторов 7, схему 8 отбора по максимуму, последовательно соединенные делитель 9, второе пороговое устройство 10 и инвертор 11, а также первый 12, второй 13 элементы И, ключ 14, блок 15 обработки сигналов, N индикаторов 16 сигнализации «типа цели». Блок 15 обработки сигналов состоит из последовательно соединенных N узкополосных фильтров 17, N линейных детекторов 18, N интеграторов 19, N пороговых устройств 20, при этом выход режекторного фильтра 2 соединен с входом каждого из N узкополосных фильтров 6, выходы которых соединены со входом каждого из N линейных детекторов 7, выход каждого из которых соединен с соответствующим N входом схемы 8 выбора по максимуму, выход которой соединен с первым входом делителя 9, второй вход которого соединен с выходом интегратора 4. Выход первого 5 порогового устройства соединен со вторым входом первого 12 элемента И, первый вход которого соединен с выходом второго 10 порогового устройства, выход которого одновременно соединен через инвертор 11 с первым входом второго 13 элемента И, второй вход которого соединен с выходом первого 5 порогового устройства, первый вход ключа 14 соединен с выходом режекторного фильтра 2, при этом сигнал с выхода режекторного фильтра 2, пропорциональный динамике траектории движения целей, поступает в блок 15 обработки сигналов через один из входов N узкополосных фильтров 17, N линейных детекторов 18, N интеграторов 19, N пороговых устройств 20 на один из входов N индикаторов 16 сигнализации «типа» цели», кроме того, второй вход ключа 14 соединен с выходом первого 12 элемента И.
Предлагаемое устройство работает следующим образом. Импульсный сигнал с выхода разового детектора приемного устройства поступает на вход детектора 1 огибающей. Огибающая пачки импульсов с выхода детектора 1 огибающей поступает на вход режекторного фильтра 2, осуществляющего режекцию сигналов мешающих отражений и выделение сигналов от движущихся целей, включая сигналы от вертолетов в режиме висения, у которых спектр доплеровских частот имеет шумоподобный характер. Отселектированные сигналы от воздушных целей с выхода режекторного фильтра 2 поступают на первый линейный детектор 3 и N узкополосных фильтров 6, число которых выбрано из условия перекрытия полосы доплеровских частот РЛС, а полосы пропускания согласованы с временем облучения цели. Выходной сигнал первого линейного детектора 3 сглаживается интегратором 4, постоянная времени которого также согласована с временем облучения.
В случае движущейся воздушной цели сигнал на выходе интегратора 4 и максимальный сигнал на выходах линейных N детекторов 7 будут мало отличаться друг от друга, а в случае облучения вертолета в режиме висения выходной сигнал интегратора 4 будет ориентировочно в  раз превышать максимальный сигнал на выходах линейных N детекторов 7. Это обусловлено тем, что в случае движущейся цели сигнал имеет регулярное доплеровское смещение, в результате чего он сосредоточен в полосе одного из узкополосных фильтров 6, а в случае вертолета в режиме висения сигнал равномерно распределен между N узкополосными фильтрами 6. Максимальный сигнал линейных N детекторов 7 через схему 8 отбора по максимуму поступает на первый вход делителя 9, а выходной сигнал интегратора 4 поступает на второй вход делителя 9 и на вход первого порогового устройства 5. Делитель 9 осуществляет нормировку сигнала с выхода схемы 8 отбора по максимуму по сигналу с выхода интегратора 4, чем обеспечивается независимость работы устройства от дальности и эффективной площади рассеивания цели.
раз превышать максимальный сигнал на выходах линейных N детекторов 7. Это обусловлено тем, что в случае движущейся цели сигнал имеет регулярное доплеровское смещение, в результате чего он сосредоточен в полосе одного из узкополосных фильтров 6, а в случае вертолета в режиме висения сигнал равномерно распределен между N узкополосными фильтрами 6. Максимальный сигнал линейных N детекторов 7 через схему 8 отбора по максимуму поступает на первый вход делителя 9, а выходной сигнал интегратора 4 поступает на второй вход делителя 9 и на вход первого порогового устройства 5. Делитель 9 осуществляет нормировку сигнала с выхода схемы 8 отбора по максимуму по сигналу с выхода интегратора 4, чем обеспечивается независимость работы устройства от дальности и эффективной площади рассеивания цели.
Выходной сигнал делителя 9 поступает на вход второго 10 порогового устройства. Сигнал на входе второго 10 порогового устройства в случае движущейся воздушной цели будет иметь амплитуду, превышающую порог срабатывания, а в случае шумоподобного сигнала срабатывание второго 10 порогового устройства не происходит. Таким образом, на выходе второго 10 порогового устройства будет присутствовать сигнал только при наличии сигнала от движущейся воздушной цели. Первое 5 пороговое устройство будет срабатывать при наличии как сигналов от движущихся воздушных целей, имеющих в спектре регулярную составляющую, так и сигналов от вертолетов в режиме висения, спектр доплеровских частот которых носит шумоподобный характер. Сигналы с выхода первого 5 порогового устройства подаются на первые входы первого 12 элемента И и второго 13 элемента И, а с выхода второго 5 порогового устройства на второй вход первой 12 элемента И и через инвертор 11 на второй вход второго 13 элемента И. Сигналы от движущихся воздушных целей будут присутствовать только на выходе первого 12 элемента И, который является первым выходом устройства, а сигналы от вертолетов в режиме висения будут только на выходе второго 13 элемента И, который является вторым выходом устройства.
Блок 15 обработки сигналов обеспечивает анализ динамики изменения траектории движения целей. Траектория движения истребителей по сравнению с траекторией движения бомбардировщика более динамична, кроме того, при полете целей в паре траектория динамики движения ведомого более динамична, чем траектория движения ведущего.
В случае, если воздушная цель является движущей, сигнал с выхода первого 12 элемента И, поступает на второй вход ключа 14, который срабатывает и при этом обеспечивает поступления сигнала с выхода режекторного фильтра 2, пропорционального динамике изменения траектории движения целей на один из входов N узкополосных фильтров 17, N детекторов 18, N интеграторов 19, N пороговых устройств 20 на один из входов N индикаторов 16 сигнализации «типа цели».
На основе разницы траектории движения истребителя или стратегического бомбардировщика совокупность одного из N узкополосных фильтров 17, N детекторов 18, N интеграторов 19, N пороговых устройств 20 обеспечивает определения типа цели.
Кроме того, если истребители движутся в паре, то можно выделить по траекторным изменениям ведущего и ведомого, так как у ведомого более интенсивная траектория движения цели.
На основе определения типа цели, а также определения ведущего или ведомого принимается решение об очередности поражения воздушной цели.
В случае, если воздушной целью является вертолет в режиме висения, сигнал на выходе первого 12 элемента И отсутствует, при этом на второй вход ключа 14 сигнал не подается и сигнал с выхода режекторного фильтра 2 на блок 15 обработки сигналов не поступает.
Таким образом, обеспечивается обнаружение воздушных целей и их распознавание, включая вертолеты в режиме висения, а также типы движущих целей, истребители, стратегические бомбардировщики, ведущий и ведомый при полете в паре по динамике их траекторных изменений.
Источники информации
1. Ю.И.Фельдман и др. Сопровождение движущихся целей. М.: Сов. Радио, 1978, стр.17.
2. Патент РФ на изобретение «Устройство обнаружения движущихся целей» №1840156, кл. G01S 13/52, 27.07.2006 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2006 |
|
RU2312296C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2007 |
|
RU2344969C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492503C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492501C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2402040C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2308738C1 |
Изобретение относится к радиолокационным системам и может быть использовано для распознавания различий между движущимися объектами по динамике их траекторных изменений в процессе полета. Технический результат - расширение функциональных возможностей, а именно - распознавание типа движущихся воздушных целей по динамике траекторных изменений в процессе полета цели достигается за счет того, что сигналы от движущихся воздушных целей присутствуют только на выходе первого элемента И, который является первым выходом устройства, а сигналы от вертолетов в режиме висения будут только на выходе второго элемента И, который является вторым выходом устройства. Тип цели определяется на основе анализа траектории движения цели блоком обработки сигнала, тип цели высвечивается одним из сигнализаторов. 1 ил.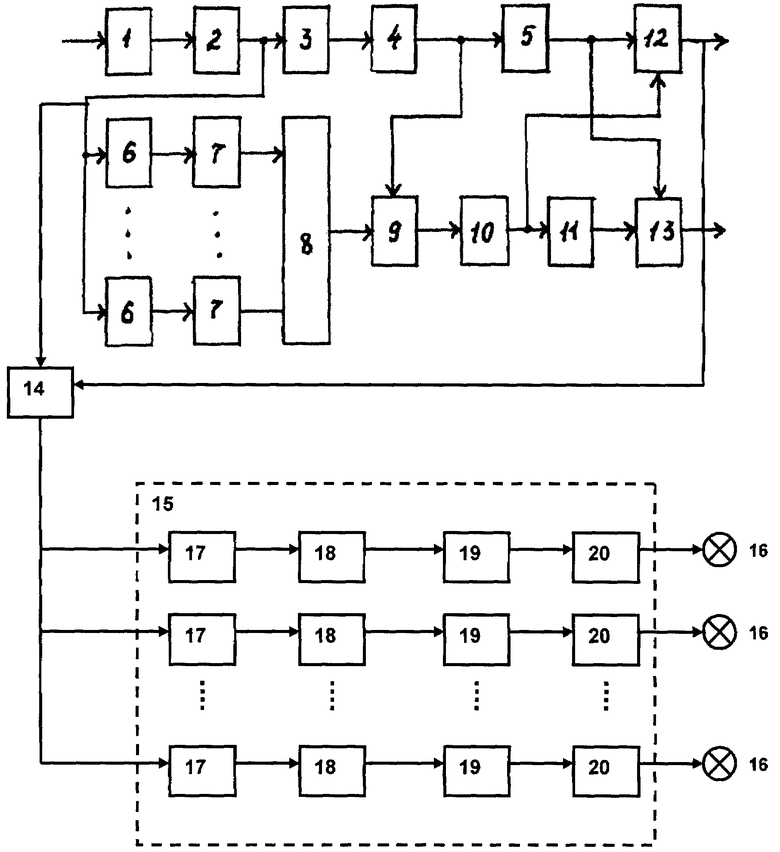
Устройство обнаружения движущихся целей, содержащее последовательно соединенные детектор огибающей, режекторный фильтр, первый линейный детектор, интегратор и первое пороговое устройство, N узкополосных фильтров, N линейных детекторов, схему выбора по максимуму, последовательно соединенные делитель, второе пороговое устройство и инвертор, а также первый и второй элементы И, при этом выход режекторного фильтра соединен с входом каждого из N узкополосных фильтров, выходы которых соединены с входом каждого из N линейных детекторов, выход каждого из которых соединен с соответствующим N входом схемы выбора по максимуму, выход которой соединен с первым входом делителя, второй вход которого соединен с выходом интегратора, выход первого порогового устройства соединен с первыми объединенными входами первого и второго элементов И, а выход второго порогового устройства подключен к вторым входам первого и второго элементов И соответственно непосредственно и через инвертор, вход детектора огибающей является входом устройства, а выходы первого и второго элементов И - соответственно первым и вторым выходами устройства, отличающееся тем, что в него дополнительно введены ключ, блок обработки сигналов, N индикаторов сигнализации, при этом блок обработки сигналов состоит из последовательно соединенных N узкополосных фильтров, N линейных детекторов, N интеграторов, N пороговых устройств, причем первый вход ключа соединен с выходом режекторного фильтра, при этом сигнал с выхода режекторного фильтра, пропорциональный динамике траектории движения целей, поступает в блок обработки сигналов через один из входов N узкополосных фильтров, N линейных детекторов, N интеграторов, N пороговых устройств на один из входов N индикаторов сигнализации «типа» цели, кроме того, второй вход ключа соединен с выходом первого элемента И.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1988 |
|
SU1840156A1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2004 |
|
RU2262122C1 |
| Отражатель светильника | 1988 |
|
SU1610196A1 |
| US 2004151067 A1, 05.08.2004. | |||

