Изобретение относится к клипсовальной машине для разделения и зажатия наполненных содержимым упаковок в форме рукава, а также к способу управления такой клипсовальной машиной согласно ограничительным частям пунктов 1 и 14 формулы изобретения.
В частности, изобретение относится к клипсовальной машине для разделения и зажатия наполненных содержимым упаковок, в форме рукава, посредством зажимных скрепок, по меньшей мере, с первым и вторым блоками зажимного инструмента, реверсивно перемещающимися относительно друг друга для установки и зажатия, по меньшей мере, одной скрепки (клипсы) между открытым положением и закрытым положением. Кроме того, изобретение относится к способу управления такой клипсовальной машиной.
При помощи клипсовальной машины прежде названного вида обычно закрывают пакеты или упаковки в форме рукава (рукавообразная или кишкообразная оболочка), наполненные жидким до тягуче-пастообразного или также (частично) гранулированным содержимым. При осуществлении этого процесса сначала помещают содержимое в упаковку, а затем, если упаковка имеет форму кишки, разделяют ее посредством вытесняющих элементов на порции. Для этого с помощью вытесняющих элементов пережимают кишкообразную оболочку в радиальном направлении и вытесняют находящееся на участке пережимания содержимое в осевом направлении по отношению к оси кишки. Вследствие этого на участке пережимания образуется кишкообразная цепочка. В процессе следующего рабочего хода на образованную кишкообразную цепочку накладывают один, а в случае двойного клипсования - два скрепочных элемента в виде скрепок или клипс посредством двух перемещающихся друг против друга зажимных инструментов. Пары зажимных инструментов содержат соответственно пуансон и матрицу, между которыми пластически деформируется клипса во время зажатия до достижения закрытого положения (точка поворота движения). После зажатия зажимные инструменты возвращаются в свое исходное положение или открытое положение.
К качеству такого зажима предъявляются высокие требования. С одной стороны, он не может быть настолько прочным, чтобы при зажатии повреждалась упаковочная оболочка, вследствие чего содержимое могло выходить или инфицироваться. Однако, с другой стороны, зажим должен быть достаточно плотным, так чтобы, например, при последующем обращении с закрытым продуктом он не сползал с упаковочной оболочки.
Чтобы гарантировать надежное зажатие клипсы, в известных клипсовальных машинах проверяют и регулируют расстояние зажатия или высоту зажатия, т.е. самое маленькое расстояние между пуансоном и матрицей при смыкании клипсы вокруг кишкообразной цепочки. Как известно, для этого изменяют исходное положение, по меньшей мере, одного из зажимных инструментов.
Из заявки ЕР 0900733 известна клипсовальная машина, имеющая дистанционный датчик для регистрации расстояния зажатия с неподвижно расположенным по отношению к зажимному инструменту дистанционным датчиком и базовой плоскостью. Это позволяет регистрировать действительно соответствующую высоте скрепки величину. Однако, дистанционный датчик непосредственно подвержен действующим на зажимные инструменты силам ускорения, так как он жестко соединен и вместе перемещается с ними. Из-за этого, в зависимости от чувствительности сенсора, его функция может ухудшаться или сенсор повреждается сам, вследствие чего больше не гарантируется надежная и точная регистрация интервала зажатия. Следующий возможный источник ошибок исходит в этом случае от подводящих проводов дистанционного датчика, которые также движутся вследствие перемещения сенсора при каждой операции зажатия и которые, вследствие этого могут деформироваться и повреждаться.
Кроме того, из публикации DE 10 2005 026 219 известна клипсовальная машина, в которой предусмотрено измерительное устройство, регистрирующее прогиб или ход пружины при зажатии клипсы, выводит на основании этого усилия зажатия и сравнивает его с заданными значениями. Если заданное значение хода пружины превышено, то вручную или при помощи мотора можно подрегулировать исходное положение одного из зажимных инструментов. Если ход пружины превышает максимальную величину, предусмотрена остановка клипсовальной машины. Кроме того, предусмотрен сенсор положения для контроля исходного положения зажимного инструмента. Эта известная клипсовальная машина позволяет сохранять примерно постоянную характеристику хода пружины, и опосредовано - усилие зажатия. Однако измерительное устройство этой клипсовальной машины имеет сложную конструкцию с множеством конструктивных элементов, которые могут представлять собой потенциальные источники неполадок.
Поэтому задачей данного изобретения является создание такой клипсовальной машины и такого способа управления этой клипсовальной машиной, благодаря которым можно уменьшить опасность ошибочной манипуляции, снизить нагрузку на зажимные блоки и сделать технологически надежнее зажатие скрепки или клипсы вокруг упаковочной оболочки.
Данная задача решается в отношении клипсовальной машины посредством признаков пункта 1, в отношении способа управления клипсовальной машиной - признаками пункта 14 формулы изобретения. Соответствующие предпочтительные выполнения содержатся в дополнительных пунктах формулы изобретения.
В частности, предлагается клипсовальная машина для разделения и зажатия упаковок в форме рукава, наполненных содержимым, посредством скрепок, по меньшей мере, с первым и вторым блоками зажимного инструмента, реверсивно перемещающихся относительно друг друга для установки и зажатия, по меньшей мере, одной скрепки (клипсы) между открытым положением и закрытым положением. При этом согласно изобретению предусмотрен, по меньшей мере, один соединенный с одним из элементов зажимного инструмента пьезо-приемник, предназначенный для измерения прилагаемого усилия зажатия при зажатии скрепки или клипсы и выдачи представленного замеряемого значения.
Пьезо-приемник содержит один (или множество) так называемых "пьезо-кристаллов", на кристаллической поверхности которых при механической нагрузке возникают электрические заряды, величина которых меняется пропорционально нагрузке. В описанном ранее устройстве возникающий заряд пропорционален усилию зажатия. В этой связи, в дальнейшем для упрощения сути говорится об измерении усилия зажатия посредством пьезо-приемника. Могут применяться пьезо-кристаллы такие, как кварц, пьезо-керамика, а также все другие подходящие пьезоэлектрические материалы.
Расположенный предложенным способом пьезо-приемник может в любой момент времени определять действующее именно сейчас на скрепку усилие. Вследствие этого операция зажатия может сразу завершиться по достижении заданной величины усилия зажатия. Вследствие этого превышение заданного усилия зажатия практически исключено.
В предпочтительном выполнении, согласно изобретению клипсовальной машины, пьезо-приемник расположен, по меньшей мере, в непосредственной близости от основного силового потока усилия зажатия. При такой установке пьезо-приемник непосредственно находится в действующем на скрепку силовом потоке. Поэтому на пьезо-приемник действует то же самое усилие или усилие той же величины, как на скрепку. Дополнительный пересчет или видоизменение выданного пьезо-приемником значения, например, для возможности учета геометрических параметров зажимающего рычага, таких, как прогиб из-за воздействия рычага не требуется. Вследствие этого определение усилия зажатия становится проще и точнее. При этом, кроме того предпочтительно, если пьезо-приемник находится в исходном положении блока зажимного инструмента под предварительным напряжением, которое в следующем выполнении можно регулировать. Посредством этого предварительного напряжения имитируют уже имеющуюся начальную силу, причем если она не достигает значения требуемой величины, то это может указывать на техническую проблему, такую как заедание зажимного инструмента, следствием чего может стать растягивающее напряжение. Отображение такого, отклоняющегося от выбранного предварительного напряжения значения, может приводить к соответствующей реакции управления. Возможность регулирования предварительного напряжения пьезо-приемника позволяет смещать этот диапазон измерения, вследствие чего становится возможным согласование пьезо-приемника с управлением или также с различным размером клипсы. Кроме того, предварительное напряжение пьезо-приемника позволяет избежать самопроизвольного изменения знака замеряемых значений, что может встречаться при неправильно отрегулированном или вызванном колебаниями окружающей среды ошибочном изменении нулевого положения. Это может исключить другой возможный источник ошибок при измерении.
В предпочтительном выполнении пьезо-приемник выполнен как инкапсулируемый сенсор. Вследствие этого он защищен почти от всех влияний окружающей среды, благодаря чему может повышаться точность замеряемых значений. В частности, благодаря этому пьезо-приемник может быть эффективно защищен от влажности, так как клипсовальные машины должны регулярно чиститься в соответствии с санитарными нормами.
В другом предпочтительном выполнении пьезо-приемник расположен на контропоре блоков зажимного инструмента или неподвижно относительно корпуса машины, вследствие чего подводящие провода пьезо-приемника также могут располагаться неподвижно относительно корпуса машины. Поэтому как пьезо-приемник, так и подводящие провода не перемещаются вместе с зажимными инструментами и не подвергаются возникающим при этом силам ускорения. Такая компоновка защищает пьезо-приемник и подводящие провода от повреждений возникающими силами ускорения и вследствие этого обеспечивается более надежное измерение.
Кроме того, предпочтительно устанавливать пьезо-приемник в защищенном положении для его дополнительной защиты от повреждений движущимися деталями. Это осуществляется с помощью кожуха пьезо-приемника. Однако пьезо-приемник можно размещать также в отверстии или в пазу контропоры или станины машины.
Кроме того, согласно изобретению в клипсовальной машине может быть предусмотрен блок управления с памятью события, устроенным для хранения актуально замеряемого значения, по меньшей мере, временно и сравнения с первым выбранным диапазоном значений. При достаточной памяти в течение длительного времени может сохраняться даже ряд замеряемых значений.
Это позволяет считывать из памяти отклонения усилия зажатия в процессе эксплуатации или также в последующем, чтобы сделать выводы о неумелом обращении или сбое. Это позволяет, в том числе производителю клипсовальной машины, иметь возможность более быстрого обнаружения причин сбоя в работе или дефекта в машине или поддерживать контроль качества.
Предпочтительно осуществлять управление с возможностью сравнивать актуально замеряемое значение со вторым выбранным диапазоном значений и выдавать команду управления, если замеряемое значение выходит за второй выбранный диапазон значений. Третий выбранный диапазон значений характеризует повышенное усилие зажатия, которое может привести к повреждениям клипсовальной машины, клипсового зажима или упаковочного материала. Поэтому блок управления согласно изобретению выполнен с возможностью сравнивать актуальное замеряемое значение с третьим выбранным диапазоном значений и останавливать клипсовальную машину, если замеряемое значение выходит за пределы третьего выбранного диапазона значений.
Согласно другой предпочтительной форме выполнения клипсовальной машины блок управления предназначен для приема характеристик усилия зажатия на пути и/или по времени и их анализа, чтобы выдавать сигнал при отклонениях от заданной характеристики, сообщающий об этом отклонении и/или влияющий определенным способом на клипсовальную машину. Анализ характеристик "усилие - путь" и/или "усилие- время" позволяет делать выводы об износе, например, зажимных инструментов или же качестве клипсового затвора. В конечном счете, о качестве затвора можно судить посредством этого анализа. Если при этом установлен недопустимо высокий износ, то об этом может сообщать соответствующий сигнал и автоматически выдаваться распоряжение об обслуживании клипсовальной машины или о вызове оператора для обслуживания.
Кроме того, для обеспечения расположения первых и вторых блоков зажимного инструмента в начале каждой операции зажатия в заданном положении, например, в исходном положении, согласно изобретению предусмотрен сенсор положения, посредством которого можно регистрировать исходное положение, по меньшей мере, одного блока зажимного инструмента. Сенсор положения соединен с блоком управления и может выдавать при детектировании, по меньшей мере, одного блока зажимного инструмента соответствующий сигнал готовности. В качестве сенсора положения может применяться, например, датчик углового положения, сигнал которого может использоваться для установки исходного положения, по меньшей мере, одного блока зажимного инструмента.
В отношении соответствующего изобретению способа управления клипсовальной машиной имеются те же самые преимущества, описанные выше в связи с соответствующей изобретению клипсовальной машиной.
Другие признаки и преимущества соответствующей изобретению клипсовальной машины, а также соответствующего изобретению способа разъясняются ниже в следующем описании примеров выполнения со ссылкой на прилагаемые чертежи. Использованные при описании примеров выполнения понятия "наверху", "внизу", "слева" и "справа" относятся к фигурам в положении нормально читаемых ссылочных обозначений и наименований фигур. На чертежах показаны:
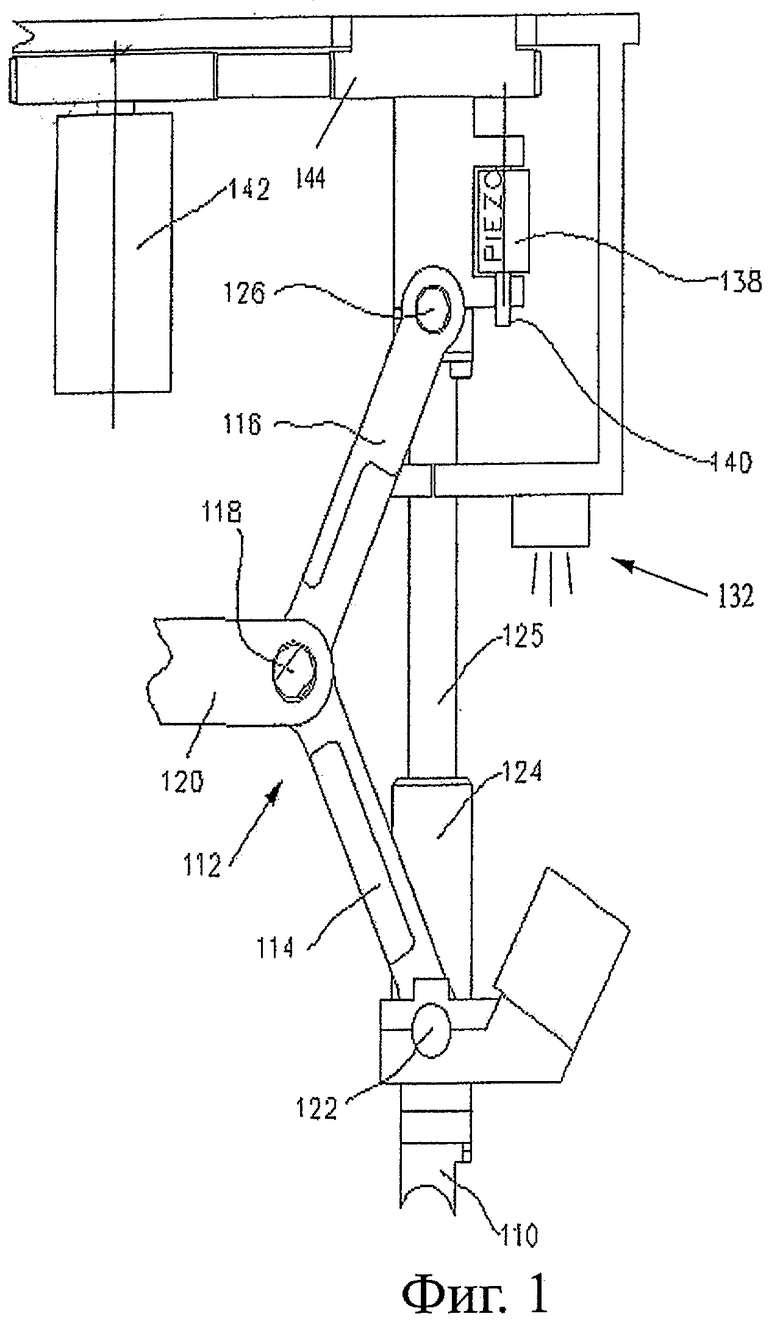
фиг.1 - фрагмент первого примера выполнения соответствующей изобретению клипсовальной машины;
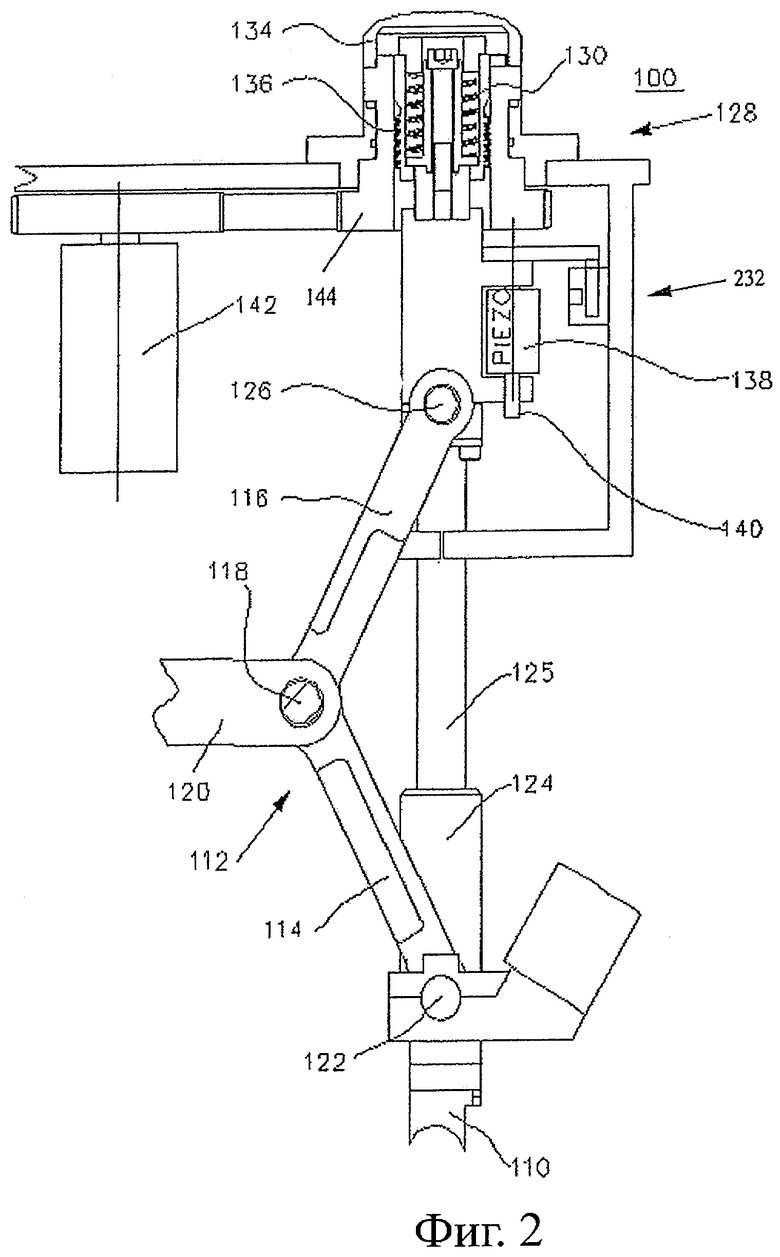
фиг.2 - фрагмент другого примера выполнения соответствующей изобретению клипсовальной машины;
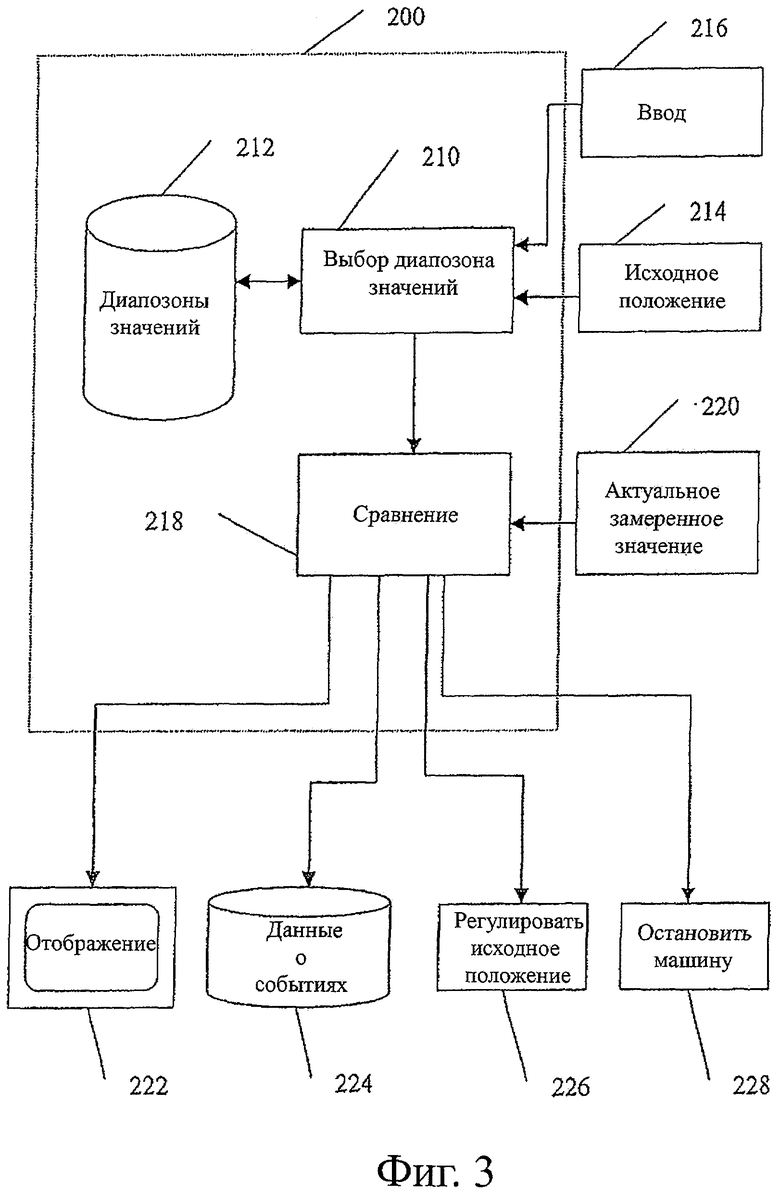
фиг.3 - схематичное изображение примера выполнения управления соответствующей изобретению клипсовальной машиной; и
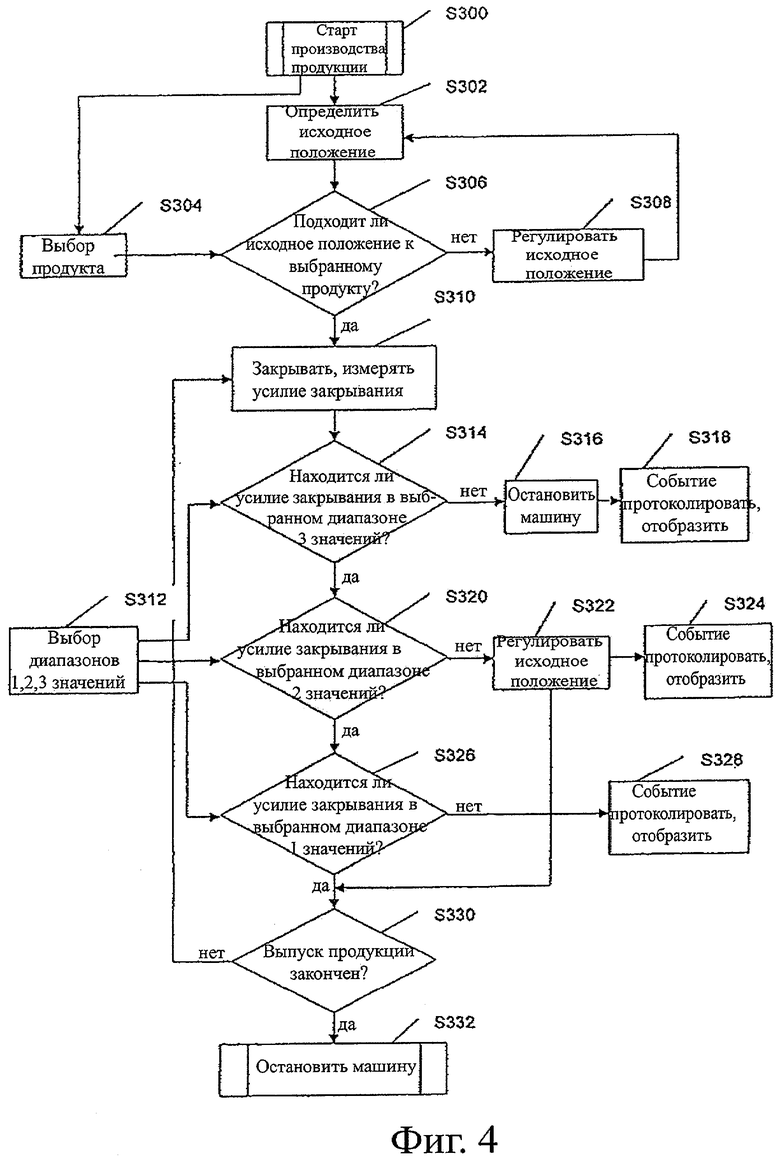
фиг.4 - схема последовательности операции зажатия и соответствующего изобретению способа управления клипсовальной машиной.
На фиг.1 показан первый блок зажимного инструмента первого примера выполнения соответствующей изобретению клипсовальной машины 100 с пуансоном 110. Пуансон 110 приводится в действие посредством устройства 112 коленчатого рычага. Устройство 112 коленчатого рычага имеет первый рычаг 114 и второй рычаг 116, образующие общее коленчатое шарнирное соединение 118. Своим удаленным от коленчатого шарнирного соединения 118 концом рычаг 114 шарнирно соединен с неподвижно соединенной с пуансоном 110 цапфой 122. Второй рычаг 116 соединен шарнирно своим противоположным коленчатому шарнирному соединению 118 концом к контропоре 126. При сгибании или вытягивании шарнирного соединения 118 посредством вызванного соединительной тягой 120 усилия, пуансон 110 перемещается вверх и вниз между верхним открытым положением и нижним закрытым положением. При этом фиксированный на опоре 124 пуансон 110 направляется телескопически цилиндрической направляющей 125, жестко соединенной с детально не изображенным корпусом машины.
В закрытом положении пуансон 110 приближен к матрице не изображенного детально второго блока зажимного инструмента почти до минимальной дистанции замыкания. Если устройство 112 коленчатого рычага вытянуто и, таким образом, пуансон 110 приводится в закрытое положение, то приложенная для деформирования и зажатия клипсы сила отводится через контропору 126.
На контропоре 126, как показано на фиг.1, расположен пьезо-приемник 138. Он вставлен в паз контропоры 126, образованной в изображенном примере выполнения двумя детально не обозначенными выступами. Также детально не изображенное фиксирующее устройство 140 удерживает пьезо-приемник 138 в его положении в пазу. Посредством фиксирующего устройства 140 можно осуществить предварительный напряг пьезо-приемник 138 между выступами и тем самым нагрузить его предварительным напряжением. Для этого фиксирующее устройство 140 может быть выполнено, например, как приводимый в действие вручную установочный винт, посредством которого можно свободно по выбору регулировать предварительное напряжение. Само собой разумеется, что можно предусмотреть автоматический привод, который может быть соединен с устройством управления и управляться им для регулирования предварительного напряжения. В этом устройстве пьезо-приемник 138 является автономной измерительной системой, то есть с помощью его независимо от других компонентов системы можно устанавливать усилие зажатия.
В изображенном примере выполнения соответствующем фиг.1 контропора 126 непосредственно и жестко соединена через исполнительный привод 142, 144 с корпусом машины. Исполнительный привод 142, 144 содержит приводной двигатель 142, например, шаговый электродвигатель, и регулировочное устройство 144. Шаговый электродвигатель 142 приводит в действие регулировочное устройство 144, которым может быть, например, известный сам по себе установочный винт, через, например, работающий без проскальзывания зубчатый ремень. Приводимое приводным двигателем 142 во вращение вокруг своей средней продольной оси, совпадающей со средней продольной осью цилиндрической направляющей 125, регулировочное устройство 144 смещает контропору 126 относительно корпуса машины вдоль ее средней продольной оси. Вследствие этого возможна регулировка исходного положения пуансона 110.
Приложенное при зажатии клипсы усилие зажатия отводится в показанном примере выполнения посредством устройства 112 коленчатого рычага и контропоры 126 на корпус 134. При этом контропора 126 деформируется при сжатии. Эта деформация оказывается незначительной, но достаточной для оказания усилия на расположенный в пазу контропоры 126 пьезо-приемник 138. Вследствие этого, пьезо-приемник 138 деформируется и выдает электрический сигнал, соответствующий вызывающему деформацию усилию, в частности, усилию зажатия. Кроме того, сенсор 132 положения расположен на корпусе машины с возможностью регистрировать исходное положение опоры 124 пуансона, а вместе с тем фиксированного к ней пуансона 110. В изображенном примере выполнения - это бесконтактно измеряющий сенсор, как, например, оптический или емкостной датчик. Также можно использовать механически работающий сенсор. Кроме того, для детектирования исходного положения опоры 124 пуансона, а вместе с ней укрепленного в ней пуансона 110 в качестве сенсора можно использовать датчик углового положения, посредством сигнала которого можно регулировать также непосредственно шаговый электродвигатель исполнительного привода 142,144.
Приложенное при операции зажатия усилие зажима определяется только расположенным в пазу контропоры 126 пьезо-приемником 138 выше описанным способом. Благодаря этому очень простому измерительному устройству исключается возможный источник ошибок и улучшается точность результата измерения, так как сокращается количество деформируемых конструктивных элементов и можно отказаться от дополнительных или излишне сложных измерительных устройств. Регулировка или коррекция исходного положения пуансона 110 происходит, например, посредством более подробно описанного на фиг.2 способа.
Изображенный на фиг.2 фрагмент другого примера выполнения соответствующей изобретению клипсовальной машины значительно соответствует примеру выполнения согласно фиг.1. Идентичные и аналогичные по функционированию конструктивные элементы обозначены одинаковыми ссылочными обозначениями. Клипсовальная машина, соответствующая фиг.2, имеет идентичные примеру выполнения на фиг.1 первый блок зажимного инструмента с пуансоном 110, устройство 112 коленчатого рычага, исполнительный привод 142, 144, а также расположенный на контропоре пьезо-приемник 138.
В отличие от примера выполнения на фиг.1 контропора 126 соединена через опорно-подшипниковое устройство 128 с корпусом машины. В частности, опорно-подшипниковое устройство 128 имеет, кроме всего прочего, пружину 130 и исполнительный привод 142, 144. Пружина 130 является нажимной пружиной, опирающейся своим противоположным контропоре 126 концом на корпус 134, неподвижно фиксируемым к корпусу машины клипсовальной машины 100.
Как можно понять из фиг.2 далее, сенсор 232 положения расположен на участке первого элемента зажимного инструмента. Сенсор 232 положения жестко соединен с корпусом машины. Сенсор 232 положения может регистрировать изменения положения контропоры 126 относительно корпуса машины над не обозначенным более детально приемником. Изображенный на этом чертеже сенсор 232 положения выполнен как механически работающий датчик хода. Однако, само собой разумеется, могут использоваться другие сенсоры, которые могут устанавливать изменения положения контропоры 126 такие, как индуктивные или оптические приемники.
При операции зажима пружина 130 также сжимается соответственно своим характеристикам пружины на зависимую от усилия зажатия величину. При помощи хода пружины дополнительно к сигналу пьезо-приемника 138 можно делать вывод об уровне усилия зажатия. Для ограничения хода пружины, или, возможности задействования характеристик пружины 130 можно предварительно напрячь пружину 130. Если предусмотрена возможность регулировки предварительного напряжения, то, например, посредством этого можно осуществлять согласование управления.
Дополнительно или также альтернативно в данном случае посредством такой компоновки пружины может быть реализована защита от перегрузки. При этом может выбираться пружина, которая деформируется только при достижении определенного усилия, как, например, желаемого усилия зажатия или незначительно более высокого усилия, так чтобы предотвращалось превышение усилия зажатия, а вместе с тем повреждение клипсовальной машины, упаковочного материала и/или клипсового затвора из-за ослабления пружины. Если, как описано выше, предусматривается регулирование предварительного напряжения, то вследствие этого можно отрегулировать усилие, при котором активируется защита от перегрузки.
На фиг.3 показан блок 200 управления для соответствующей изобретению клипсовальной машины в соответствии с примерами выполнения, представленными на фиг.1 и фиг.2, имеющего устройство 210 коммутации для диапазонов значений, а также банк 212 данных для диапазонов значений. Выбор одного или нескольких диапазонов значений из банка данных происходит в зависимости от выданного сенсором 214 положения значения исходного положения и/или посредством считанной информации о продукте. Информация о продукте может непосредственно вводиться, например, до начала выпуска продукции вручную через устройство 216 ввода. Альтернативно информация о продукте может автоматически собираться также из информационного банка данных о продукте (не показан).
После того, как с помощью устройства 210 коммутации выбран диапазон или диапазоны значений, при помощи сравнивающего устройства 218 блока 200 управления осуществляется сравнение диапазона или диапазонов значений с выданным измерительным устройством 220 замеряемым значением, показывающим прилагаемое усилие зажатия при зажатии клипса. Затем сравнивающее устройство 218 выдает команду в устройство 222 отображения для индикации события и/или в память 224 событий для протоколирования события и/или в исполнительный привод 226 для регулирования или подрегулирования исходного положения и/или в главное устройство 228 управления машиной для остановки клипсовальной машины. Выбор, в каком из устройств 222, 224, 226 и 228 выдается команда, делает сравнивающее устройство 218 посредством сравнения полученных измерительным устройством 220 замеряемых значений с несколькими диапазонами значений, как в качестве примера разъясняется при помощи фиг.4. Обычно диапазоны значений разные, однако, частично или полностью могут быть конгруэнтными.
Устройство 222 отображения сообщает о событии. Это может происходить предпочтительно оптически, но также и или дополнительно акустически. Предпочтительно для этого предлагается дисплей или экран в комбинации с акустическим предупредительным сигналом.
На фиг.4 представлен пример выполнения соответствующего изобретению способа управления клипсовальной машиной. С каждым стартом S300 выпуска продукции начинают инициализацию клипсовальной машины, содержащую, кроме прочего, соответствующий изобретению способ управления. Одновременно с инициализацией осуществляют выбор S3 04 продукта. Способ регулирования начинается с определения исходного положения S3 02 посредством соединенного с регулируемым элементом зажимного инструмента сенсора положения, который производит и выдает значение исходного положения, показывающее исходное положение регулируемого элемента зажимного инструмента. На следующем этапе S306 способа при помощи выбора продукта проверяют: подходит ли определенное значение исходного положения выбранному продукту. Если это не имеет место, на этапе S3 08 способа регулируют исходное положение. Регулирование происходит посредством исполнительного привода, которьм можно управлять вручную или автоматически сигналом, выдаваемым управлением в соответствии с выбором продукта. Согласно другой альтернативе любой приводимый в движение при помощи мотора привод можно регулировать посредством квази перманентно замеренного значения исходного положения, так что он передвигает зажимной инструмент в желаемое заданное положение, подходящее выбранному продукту.
Если желаемое значение исходного положения достигнуто, то с первым (и с каждым последующим) процессом S310 зажатия измеряют усилие зажатия. Измеренное усилие зажатия сравнивают в запросе S314 с выбранным ранее на этапе S312 диапазоном значений, устанавливаемым посредством выбранного на этапе S3 04 продукта. Если при сравнении устанавливается, что измеренное усилие зажатия находится вне выбранного диапазона 3 значений, то на этапе S316 клипсовальная машина останавливается, а на этапе 318 событие протоколируют и/или отображают.
Если измеренное усилие зажатия находится в выбранном диапазоне 3 значений, то усилие зажатия сравнивают на этапе S320 со вторым выбранным диапазоном значений. Если сравнение устанавливает, что усилие зажатия находится вне диапазона 2 значений, то на этапе S3 22 подрегулируют исходное положение и протоколируют событие на этапе S324 и/или отображают его. Если при проверке на этапе S320 определяют, что измеренное усилие зажатия также находится в пределах выбранного диапазона 2 значений, то на следующем этапе S326 проверяют, находится ли оно в первом выбранном диапазоне значений. Если это не соответствует, то событие протоколируют на этапе S328 и/или отображают.
Протокол событий может содержать в каждом из этапов S318, S324 и S328 сведения, как о выборе продукта, отрегулированном или определенном исходном положении, выбранном диапазоне значений для усилия зажатия, а также и об измеренном усилии зажатия и осуществленном действии.
Если напротив проверка на этапе S326 указывает на то, что измеренное усилие зажатия также находится в выбранном диапазоне 1 значений, на следующем этапе S330 запрашивают: закончен ли выпуск продукции и/или дана ли команда для остановки машины вручную. Тот же самый запрос: "Закончен ли выпуск продукции или поступила ли команда остановки" на этапе S330 осуществляют также на этапе S322 регулировки исходного положения, если измеренное усилие зажатия находится вне выбранного диапазона 2 значений. Если это имеет место, то на этапе S332 машину останавливают. В противном случае на этапе 310 запускают следующий цикл зажатия.
В показанном на фиг.4 примере выполнения диапазоны значений выстроены так, что при превышении первых предельных значений или, если они не достигнуты, то это только лишь протоколируют и/или отображают для получения, например, указания на возможный источник неполадок, которые влияют на износ клипсовальной машины и прочность полученного зажима. Если усилие зажатия превосходит или не достигает значения требуемой величины границ второго, как правило, более широкого диапазона предельных значений, тогда подрегулируют исходное положение для приведения усилия зажатия снова в приемлемый диапазон значений. Во время следующего цикла зажатия посредством очередного измерения усилия зажатия проверяют: была ли осуществлена достаточная регулировка исходного положения. Таким образом, осуществляют закрытый контур регулирования. Однако если усилие зажатия находится вне следующего третьего диапазона значений, что встречается, как правило, вследствие сбоя или грубого неумелого обращения, то машину сразу останавливают для устранения неполадок, прежде чем выпуск продукции или тем более машина получит повреждение.
Применение пьезо-приемника для измерения усилия зажатия позволяет измерять усилие не только в момент времени, в который достигнута дистанция замыкания, но и в любой другой момент времени во время операции зажимания. При помощи зарегистрированных таким образом значений можно регистрировать и оценивать для каждой операции зажатия характеристику "усилие-время" и/или характеристику "усилие-путь".
Оценка этих характеристик, например, при сравнении с заявленными характеристиками усилий, позволяет судить о качестве затвора. По отклонениям от идеальных характеристик усилий можно делать также вывод о возможных отклонениях качества скрепок или износе зажимных инструментов. В усовершенствовании описанного прежде управления становится возможным поступление результатов этой оценки в управление клипсовальной машины, в то время как, например, при слишком большом износе зажимных инструментов выдается соответствующий сигнал или клипсовальная машина останавливается.
На блок-схеме процесса согласно фиг.4 изображена только примерная форма выполнения. Количество диапазонов значений может быть сокращено или также увеличено. Таким образом, может происходить более точное распределение по этапам. Диапазоны значений могут частично или полностью быть идентичными. Диапазон или диапазоны значений могут выбираться вместо или дополнительно произошедшего на этапе S304 выбора продукта посредством определенного на этапе S302 исходного положения. Соответствующий изобретению способ S310 до S328 управления не неизбежно включен, как изображено на фиг.4, в производственный процесс. В частности, можно интегрировать различные промежуточные этапы или подпрограммы в изображенную последовательность способа, прежде всего, перед этапом S310 и/или после этапов S326 и S328. Нужно понимать опционально, что происходит выбор продукта согласно этапу S304 и проверка согласно этапу S306. Регулирование на этапе S308, а также подрегулирование на этапе S3 22 исходного положения может происходить соответственно вручную или автоматически. Например, также может быть предусмотрено, что этапы S302 до S308 для регулирования исходного положения происходят не после старта выпуска продукции, а после выбора продукта, осуществляемого независимо от сигнала старта.
В другой, не показанной форме выполнения согласно изобретению клипсовальной машины можно модифицировать пример выполнения по фиг.2, исходя из того, что отказываются от исполнительного привода 142, 144, а контропора 126 непосредственно соединена с корпусом машины. В этом случае регулирование исходного положения пуансона 110 было бы больше невозможно. Как уже указывалось, посредством пьезо-приемника 138 можно измерять действующее на пуансон 110 усилие в любой момент времени операции зажатия. Поэтому управление можно было бы модифицировать в этом случае в том отношении, что привод пуансона 110 по достижении определенного значения усилия зажатия выключают и начинают движение в противоположном направлении. Таким образом, конструкция машины и управление могли бы быть заметно упрощены.
Кроме того, можно вставить пьезо-приемник 138 в выполненное в контропоре 126 отверстие, как, например, сверление или ему подобное. В этом случае пьезо-приемник 138 располагался бы непосредственно в центре основного силового потока, вследствие чего можно было бы достигнуть еще более точного измерения усилия зажатия.
Пьезо-приемник 138 может, независимо от описанной функции в связи с блоком 200 управления, также использоваться как контролирующее устройство, вызывающее остановку клипсовальной машины, если определенный участок замеряемого значения превышен или не достигает значения требуемой величины. Если усилие зажатия при нормальных условиях эксплуатации не выходит за предварительно установленный участок, то вследствие этого управление соответствующей изобретению клипсовальной машины можно еще больше упростить. Поскольку в этом случае клипсовальная машина делает остановку посредством пьезо-приемника 138 только в крайних случаях, - поломка машины или явления износа, при которых требуется ремонт, - то подрегулирование усилия зажатия при помощи блока 200 управления можно совсем исключить.
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛИПСАТОР И СПОСОБ НАСТРОЙКИ КЛИПСАТОРА | 2006 |
|
RU2399565C2 |
| КЛИПСАТОР | 2006 |
|
RU2386573C2 |
| ПОДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕМЕНТОВ ПОДВЕСА | 2010 |
|
RU2505066C2 |
| УЗЕЛ ТОРМОЗА ОБОЛОЧКИ | 2016 |
|
RU2650380C1 |
| СИСТЕМА ИЗ КЛИПСАТОРА И МАГАЗИНА КЛИПС И СПОСОБ ЭКСПЛУАТАЦИИ ТАКОГО КЛИПСАТОРА | 2006 |
|
RU2429999C2 |
| ПРИВОДИМОЕ В ДЕЙСТВИЕ МЕХАНИЧЕСКИ УСТРОЙСТВО, В ЧАСТНОСТИ ФРЕЗЕРНОЕ УСТРОЙСТВО | 2016 |
|
RU2655554C2 |
| АВТОМАТИЗАЦИЯ ТРУБОФОРМОВОЧНОГО ПРЕССА С ИСТОЧНИКОМ СВЕТА ДЛЯ ИЗМЕРЕНИЯ ВНУТРЕННЕГО КОНТУРА ТРУБЫ | 2011 |
|
RU2579408C2 |
| УСТРОЙСТВО И СПОСОБ ПОРЦИОНИРОВАНИЯ И УПАКОВЫВАНИЯ | 2006 |
|
RU2401605C2 |
| КЛИПСАТОР С ПРОСТЫМ ДОСТУПОМ | 2016 |
|
RU2650379C1 |
| АВТОМАТИЧЕСКАЯ КЛЕПАЛЬНАЯ МАШИНА | 1993 |
|
RU2106926C1 |
Группа изобретений относится к клипсовальной машине для разделения и зажатия наполненных содержимым упаковок в форме кишки посредством скрепок. Машина содержит, по меньшей мере, первый и второй блоки зажимного инструмента, реверсивно перемещающиеся относительно друг друга для установки и зажатия, по меньшей мере, одной скрепки относительно друг друга между открытым и закрытым положениями. Машина содержит также, по меньшей мере, один соединенный с одним из блоков зажимного инструмента пьезо-приемник для измерения приложенного усилия зажатия и выдачи замеряемой величины, находящийся в исходном положении зажимного инструмента под предварительным напряжением, которое можно регулировать фиксирующим устройством. Способ управления вышеописанной машиной характеризуется тем, что измеряют приложенное усилие зажатия при зажатии скрепки посредством, по меньшей мере, одного, соединенного с одним из блоков зажимного инструмента пьезо-приемника, выполненного так, как это изложено выше. Группа изобретений обеспечивает упрощение, а также надежность работы и увеличение ее срока. 2 н. и 19 з.п. ф-лы, 4 ил.
1. Клипсовальная машина (100) для разделения и зажатия наполненных содержимым упаковок в форме рукава посредством скрепок, по меньшей мере, с первым и вторым блоками зажимного инструмента, реверсивно перемещающихся относительно друг друга для установки и зажатия, по меньшей мере, одной скрепки (клипсы) относительно друг друга между открытым положением и закрытым положением, отличающаяся тем, что предусмотрен, по меньшей мере, один соединенный с одним из блоков зажимного инструмента пьезоприемник (138), предназначенный для измерения приложенного усилия зажатия при зажатии скрепки или клипсы и выдачи представленной замеряемой величины,
причем пьезоприемник (138) находится в исходном положении зажимного инструмента под предварительным напряжением, и
причем предварительное напряжение пьезоприемника 138 можно регулировать посредством фиксирующего устройства 140.
2. Клипсовальная машина по п.1, отличающаяся тем, что пьезоприемник (138) расположен, по меньшей мере, в непосредственной близости от основного силового потока усилия зажатия.
3. Клипсовальная машина по п.2, отличающаяся тем, что пьезоприемник (138) выполнен как инкапсулируемый сенсор.
4. Клипсовальная машина по любому из пп.1-3, отличающаяся тем, что пьезоприемник (138) расположен на контропоре (126) блоков зажимного инструмента или неподвижно относительно корпуса машины.
5. Клипсовальная машина по любому из пп.1-3, отличающаяся тем, что пьезоприемник (138) расположен неподвижно относительно корпуса машины.
6. Клипсовальная машина по п.4, отличающаяся тем, что пьезоприемник (138) расположен в защищенном положении.
7. Клипсовальная машина по п.5, отличающаяся тем, что пьезоприемник (138) расположен в защищенном положении.
8. Клипсовальная машина по п.6 или 7, отличающаяся тем, что подводящие провода пьезоприемника (138) расположены неподвижно относительно корпуса машины.
9. Клипсовальная машина по п.1, отличающаяся тем, что предусмотрен блок (200) управления с памятью (224) событий, предназначенный для хранения актуально замеряемого значения, по меньшей мере, временно и сравнения с первым выбранным диапазоном значений.
10. Клипсовальная машина по п.9, отличающаяся тем, что блок (200) управления выполнен с возможностью сравнивать актуально замеряемое значение со вторым выбранным диапазоном значений и выдавать команду управления, если замеряемое значение выходит за второй выбранный диапазон значений.
11. Клипсовальная машина по п.9, отличающаяся тем, что блок (200) управления выполнен с возможностью сравнивать актуально замеряемое значение с третьим выбранным диапазоном значений и останавливать клипсовальную машину, если замеряемое значение выходит за пределы третьего выбранного диапазона значений.
12. Клипсовальная машина по п.9, отличающаяся тем, что блок (200) управления выполнен с возможностью принимать характеристики усилия зажатия на пути и/или по времени.
13. Клипсовальная машина по п.12, отличающаяся тем, что блок (200) управления выполнен с возможностью принимать характеристики усилия зажатия на пути и/или по времени и их анализа с тем, чтобы выдавать сигнал при отклонениях от заданной характеристики, сообщающий об этом отклонении и/или влияющий определенным образом на клипсовальную машину (100).
14. Клипсовальная машина по п.1, отличающаяся тем, что предусмотрен датчик (132, 232) положения, посредством которого можно регистрировать исходное положение, по меньшей мере, одного блока зажимного инструмента.
15. Способ управления клипсовальной машиной (100) для разделения и зажатия наполненных содержимым упаковок, в форме рукава, посредством скрепок, по меньшей мере, с первым и вторым блоками зажимного инструмента, реверсивно перемещающихся относительно друг друга для установки и зажатия, по меньшей мере, одной скрепки (клипсы) относительно друг друга между открытым положением и закрытым положением, отличающийся тем, что измеряют приложенное усилие зажатия при зажатии скрепки посредством, по меньшей мере, одного, соединенного с одним из блоков зажимного инструмента пьезоприемника (138),
причем пьезоприемник (138) находится в исходном положении блока зажимного инструмента под предварительным напряжением и,
причем предварительное напряжение пьезоприемника (138) регулируют посредством фиксирующего устройства (140)
и выдают замеренное значение, соответствующее усилию зажатия.
16. Способ по п.15, отличающийся тем, что хранят и сравнивают актуальные замеряемые значения с первым выбранным диапазоном значений.
17. Способ по п.15 или 16, отличающийся тем, что сравнивают актуальные замеряемые значения со вторым выбранным диапазоном значений и выдают команды управления, если замеряемое значение выходит за второй выбранный диапазон значений.
18. Способ по п.15 или 16, отличающийся тем, что сравнивают актуальное замеряемое значение с третьим выбранным диапазоном значений и останавливают клипсовальную машину, если замеряемое значение выходит за пределы третьего выбранного диапазона значений.
19. Способ по п.15 или 16, отличающийся тем, что анализируют характеристики усилия зажатия на пути и/или по времени и отображают отклонения от заданной характеристики и/или воздействуют определенным способом на клипсовальную машину (100) при отклонениях от заданных характеристик.
20. Способ по п.17, отличающийся тем, что анализируют характеристики усилия зажатия на пути и/или по времени и отображают отклонения от заданной характеристики и/или воздействуют определенным способом на клипсовальную машину (100) при отклонениях от заданных характеристик.
21. Способ по п.18, отличающийся тем, что анализируют характеристики усилия зажатия на пути и/или по времени и отображают отклонения от заданной характеристики и/или воздействуют определенным способом на клипсовальную машину (100) при отклонениях от заданных характеристик.
| RU 2006119910 А, 27.12.2007 | |||
| DE 4337797 A1, 11.05.1996 | |||
| DE 4432607 A1, 16.03.1995. |

