Изобретение относится к устройствам для передачи и преобразования движения и сил, в частности, к кулачковым реверсивным механизмам, преобразующим винтовое движение ведущего звена в сложное движение ведомого звена.
Известен кулачковый реверсивный механизм, содержащий стойку, введенный с ней в подвижное соединение ведущий кулачок и ведомое звено, введенное со стойкой и с ведущим кулачком в подвижные соединения. Ведущий кулачок выполнен в виде подвижно соединенной со стойкой пластины со скрепленной с ней с помощью державок упругой лентой, образующей контактную поверхность ведущего кулачка (SU №926410 F16H 53/04, опубл. 07.05.1982). Этот механизм сложен по конструкции и его кинематические возможности ограничены - перемещение ведущего кулачка преобразуется только в возвратно-поступательное перемещение или покачивание ведомого звена.
Наиболее близким техническим решением к заявляемому устройству является кулачковый реверсивный механизм, содержащий стойку, введенный с ней в подвижное соединение ведущий кулачок, который введен в подвижное соединение с ведомым толкателем, введенным в подвижное соединение со стойкой (Кожевников С.Н. Теория механизмов и машин. - М.: Машиностроение, 1973. - С.168, рис.8.1в). Благодаря конструктивной возможности выбора любой конфигурации ведущего кулачка можно обеспечить перемещение ведомого толкателя по любому заранее заданному закону движения. Однако кинематические возможности этого механизма состоят лишь в преобразовании вращения ведущего кулачка в прямолинейное возвратно-поступательное перемещение толкателя.
Задача, на решение которой направлено изобретение, - расширение функциональных возможностей кулачкового реверсивного механизма за счет наложения на основное движение ведомого толкателя его поступательного перемещения параллельно оси вращения ведущего кулачка.
Технический результат - расширение функциональных возможностей механизма.
Технический результат достигается тем, что в кулачковом реверсивном механизме, содержащем стойку, введенный с ней в подвижное соединение ведущий кулачок, который введен в подвижное соединение с ведомым толкателем, введенным в подвижное соединение со стойкой, кулачок выполнен с двухсторонней ребордой, охватывающей ведомый толкатель, подвижное соединение ведущего кулачка со стойкой выполнено в виде винтового соединения, подвижное соединение ведомого толкателя со стойкой выполнено в виде двухпоступательного двухползунного кинематического соединения с возможностью поступательного перемещения ведомого толкателя параллельно оси винтового соединения ведущего кулачка со стойкой.
Новым по сравнению с прототипом в предложенном устройстве является:
- новое конструктивное выполнение элемента:
ведущий кулачок выполнен с двухсторонней ребордой;
- новая связь между элементами:
двухсторонняя реборда охватывает ведомый толкатель;
- новые формы выполнения связей между элементами:
подвижное соединение ведущего кулачка со стойкой выполнено в виде винтового соединения;
подвижное соединение ведомого толкателя со стойкой выполнено в виде двухпоступательного двухползунного кинематического соединения с возможностью поступательного перемещения ведомого толкателя параллельно оси винтового соединения ведущего кулачка со стойкой.
Таким образом, по мнению заявителя, предложение является новым по сравнению с прототипом, так как оно неизвестно из уровня техники.
Предложение, по мнению заявителя, имеет изобретательский уровень, так как оно для специалистов явным образом не следует из уровня техники и не может быть разработано с использованием известных методов, методик, правил и приемов расчета, проектирования и конструирования машин и их механизмов.
Предложенное техническое решение иллюстрируется схемой. Кулачковый реверсивный механизм содержит стойку 1, ведущий кулачок 2 и ведомый толкатель 3, введенные со стойкой 1 в подвижные соединения 4 и 5. Ведущий кулачок 2 и ведомый толкатель 3 введены в непосредственное подвижное соединение 6. Ведущий кулачок 2 выполнен с двухсторонней ребордой 7, охватывающей ведомый толкатель 3. Подвижное соединение 4 ведущего кулачка 2 со стойкой 1 выполнено в виде винтового соединения. Подвижное соединение 5 ведомого толкателя 3 со стойкой 1 выполнено в виде двухпоступательного двухползунного кинематического соединения, составленного из двух жестко скрепленных между собой ползунов- тем самым обеспечивается возможность поступательного перемещения ведомого толкателя 3 параллельно оси винтового соединения 4 ведущего кулачка 2 со стойкой 1.
Предложенный кулачковый реверсивный механизм работает следующим образом. Ведущий кулачок 2 поворачивают и одновременно смещают вдоль оси винтового соединения 4 относительно стойки 1. За счет подвижного соединения 6, в которое введены ведущий кулачок 2 и ведомый толкатель 3, ведомый толкатель 3 поступательно перемещается относительно стойки 1 в вертикальном направлении. Одновременно с этим за счет осевого давления торца двухсторонней реборды 7 на ведомый толкатель 3 он перемещается поступательно параллельно оси винтового соединения 4 ведущего кулачка 2 со стойкой 1. Таким образом, ведомый толкатель 3 перемещается возвратно-поступательно относительно стойки 1 в вертикальном направлении и одновременно перемещается поступательно параллельно оси винтового соединения 4 в горизонтальном направлении. Поступательное горизонтальное перемещение ведомого толкателя 3 ограничено длиной винта в винтовом соединении 4, при достижении крайнего положения механизм реверсируют, изменяя направление вращения ведущего кулачка 2.
Таким образом, предложение реализует широкий спектр функциональных возможностей кулачкового реверсивного механизма и увеличивает эффективность его использования благодаря наложению на основное движение ведомого толкателя 3, а именно возвратно-поступательное вертикальное перемещение, его поступательного горизонтального перемещения параллельно оси винтового соединения 4 ведущего кулачка 2 со стойкой 1.
Кулачковый реверсивный механизм выполнен организацией-заявителем. При испытаниях он продемонстрировал свою работоспособность и возможность достижения технического результата. Таким образом, заявляемое техническое решение соответствует критерию изобретения - «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| КУЛАЧКОВЫЙ РЕВЕРСИВНЫЙ МЕХАНИЗМ | 2012 |
|
RU2493455C1 |
| КУЛАЧКОВЫЙ РЕВЕРСИВНЫЙ МЕХАНИЗМ | 2012 |
|
RU2493456C1 |
| КУЛАЧКОВЫЙ РЕВЕРСИВНЫЙ МЕХАНИЗМ | 2012 |
|
RU2491457C1 |
| РЕВЕРСИВНЫЙ МЕХАНИЗМ | 2012 |
|
RU2492379C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2310786C1 |
| Кулачковый вариатор | 1991 |
|
SU1810685A1 |
Изобретение относится к устройствам для передачи и преобразования движения и сил, в частности к кулачковым реверсивным механизмам. Кулачковый реверсивный механизм содержит стойку, ведущий кулачок и ведомый толкатель, введенные со стойкой в подвижные соединения. Ведущий кулачок и ведомый толкатель введены в непосредственное подвижное соединение. Ведущий кулачок выполнен с двухсторонней ребордой, охватывающей ведомый толкатель. Подвижное соединение ведущего кулачка со стойкой выполнено в виде винтового соединения, а подвижное соединение ведомого толкателя со стойкой выполнено в виде двухподвижного цилиндрического сопряжения с возможностью поступательного перемещения ведомого толкателя параллельно оси винтового соединения. Техническим результатом является расширение функциональных возможностей механизма. 1 ил.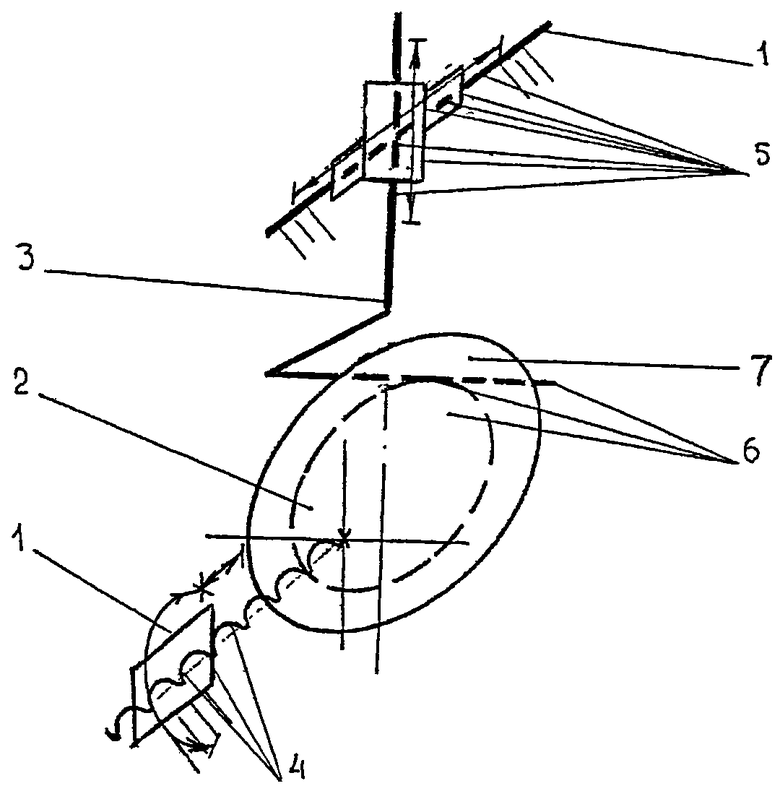
Кулачковый реверсивный механизм, содержащий стойку, введенный с ней в подвижное соединение ведущий кулачок, который введен в подвижное соединение с ведомым толкателем, введенным в подвижное соединение со стойкой, отличающийся тем, что ведущий кулачок выполнен с двухсторонней ребордой, охватывающей ведомый толкатель, подвижное соединение ведущего кулачка со стойкой выполнено в виде винтового соединения, подвижное соединение ведомого толкателя со стойкой выполнено в виде двухпоступательного двухползунного кинематического соединения с возможностью поступательного перемещения ведомого толкателя параллельно оси винтового соединения ведущего кулачка со стойкой.
| Кожевников С.Н | |||
| Теория механизмов и машин | |||
| - М.: Машиностроение, 1973, с.168, рис | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Кулачковый механизм | 1976 |
|
SU596768A2 |
| Кулачковый механизм | 1980 |
|
SU937847A1 |
| Рычажно-кулачковый механизм | 1984 |
|
SU1250757A1 |

