Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известны мехатронные системы, содержащие вентильно-индукторные двигатели, с различным числом фаз и явнополюсными роторами без обмоток и постоянных магнитов и статорами с сосредоточенными обмотками на полюсах. Каждая фаза этих двигателей коммутируется напряжением при помощи полумостовой схемы, содержащей два транзистора и два диода (Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М.: Издательство МЭИ, 2003. - С.10, 62-63).
Недостатками этих мехатронных систем и способа коммутации фаз вентильно-индукторных двигателей являются высокий уровень шумов, вибрации и пульсаций момента.
Из известных технических решений наиболее близким по достигаемому результату к предлагаемому изобретению является шестифазный низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов, содержащий статор с числом прямоугольных зубцов, кратным шести, и ротор с числом зубцов, меньшим числа зубцов статора на величину этой кратности (например,  и так далее, где Z1 - число зубцов статора; Z2 - число зубцов ротора), фазные обмотки которого, соединенные в треугольник, питаются от трехфазного мостового инвертора через включенные в каждую обмотку по одному диоду и управляемый трехфазным прямоугольным линейным напряжением, которое формируется с помощью датчика положения ротора и системы управления. (Плах Г.К., Лозитский О.Е., Луговец В.А., Протасов Д.А., Мустафаев P.P. Низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов. / Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу. АЭП-2007, Санкт-Петербург, 18-21 сентября, 2007).
и так далее, где Z1 - число зубцов статора; Z2 - число зубцов ротора), фазные обмотки которого, соединенные в треугольник, питаются от трехфазного мостового инвертора через включенные в каждую обмотку по одному диоду и управляемый трехфазным прямоугольным линейным напряжением, которое формируется с помощью датчика положения ротора и системы управления. (Плах Г.К., Лозитский О.Е., Луговец В.А., Протасов Д.А., Мустафаев P.P. Низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов. / Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу. АЭП-2007, Санкт-Петербург, 18-21 сентября, 2007).
Недостатками этого технического решения являются большая неравномерность момента (в описании прототипа пульсации момента составляют 16%).
Целью предлагаемого изобретения является уменьшение пульсации неравномерности момента.
Поставленная цель достигается тем, что мехатронная система, содержащая известный шестифазный низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов, содержащий статор с числом прямоугольных зубцов, кратным шести, и ротор с числом зубцов, меньшим числа зубцов статора на величину этой кратности, имеет угловую ширину зубцов статора, равную угловой ширине межзубцового расстояния статора, и угловую ширину зубцов ротора, равную угловой ширине межзубцового расстояния ротора ( , где
, где  - угловая ширина зубцов статора;
- угловая ширина зубцов статора;  - угловая ширина межзубцового расстояния статора;
- угловая ширина межзубцового расстояния статора;  - угловая ширина зубцов ротора,
- угловая ширина зубцов ротора,  , где
, где  - угловая ширина межзубцового расстояния ротора), поверхность межзубцовой впадины зубцов ротора имеет форму полуцилиндра, радиус которого равен половине линейного межзубцового расстояния зубцов ротора (
- угловая ширина межзубцового расстояния ротора), поверхность межзубцовой впадины зубцов ротора имеет форму полуцилиндра, радиус которого равен половине линейного межзубцового расстояния зубцов ротора ( , где
, где  - радиус полуцилиндра,
- радиус полуцилиндра,  - линейные межзубцовые расстояния зубцов ротора), благодаря чему индуктивности фаз, при разложении в ряд Фурье, описываются уравнением, содержащим только нулевую и первую гармоники, фазные обмотки двигателя соединены в звезду, двигатель управляется токами, имеющими форму «детектированной синусоиды», которые формируются с помощью частотно-токового управления (Бродовский В.Н. Иванов Е.С. Приводы с частотно-токовым управлением. Под. ред В.Н.Бродовского. М.: Энергия, 1974), инвертором, содержащим три полумостовые схемы, а форма тока фаз задается датчиком положения. Такая форма индуктивности фаз в совокупности с такой формой тока существенно уменьшает пульсации момента.
- линейные межзубцовые расстояния зубцов ротора), благодаря чему индуктивности фаз, при разложении в ряд Фурье, описываются уравнением, содержащим только нулевую и первую гармоники, фазные обмотки двигателя соединены в звезду, двигатель управляется токами, имеющими форму «детектированной синусоиды», которые формируются с помощью частотно-токового управления (Бродовский В.Н. Иванов Е.С. Приводы с частотно-токовым управлением. Под. ред В.Н.Бродовского. М.: Энергия, 1974), инвертором, содержащим три полумостовые схемы, а форма тока фаз задается датчиком положения. Такая форма индуктивности фаз в совокупности с такой формой тока существенно уменьшает пульсации момента.
По сравнению с наиболее близкими аналогичными техническими решениями предлагаемые устройства имеют следующие новые признаки:
1. угловая ширина зубцов статора равна угловой ширине межзубцового расстояния статора, а угловая ширина зубцов ротора равна угловой ширине межзубцового расстояния ротора, поверхность межзубцовой впадины зубцов ротора имеет форму полуцилиндра, радиус которого равен половине линейного межзубцового расстояния зубцов ротора, фазные обмотки соединены в звезду;
2. двигатель управляется токами, имеющими форму «детектированной синусоиды», которые формируются с помощью частотно-токового управления, инвертором, содержащим три полумостовые схемы, а форма тока фаз задается датчиком положения.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
Предлагаемое изобретение было реализовано и испытано в ОАО «НИПТИЭМ». При испытаниях предлагаемого изобретения установлено, что пульсации момента составляют 2%.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По отличительном признакам проведен поиск известных технических решений в области электротехники, автоматики и электропривода, мехатронной системы, содержащей шестифазный вентильно-индукторный двигатель с угловой шириной зубцов статора, равной угловой ширине межзубцового расстояния статора, и угловой шириной зубцов ротора, равной угловой ширине межзубцового расстояния ротора, с поверхностью межзубцовых впадин зубцов ротора, имеющих форму полуцилиндра, радиус которого равен половине линейного межзубцового расстояния зубцов ротора, фазные обмотки которого соединены в звезду и управляются токами, имеющими форму «детектированной синусоиды», которые формируются с помощью частотно-токового управления инвертором, содержащим три полумостовые схемы, а форма тока фаз задается датчиком положения, не обнаружено.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежами.
На фиг.1 показан шестифазный низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов с двенадцатью зубцами статора, на которых размещены двенадцать сосредоточенных обмоток, содержащий симметричный ротор с десятью зубцами.
На фиг.1 обозначено: 1 - статор; 2 - обмотка; 3 - ротор;  - угловая ширина зубцов статора;
- угловая ширина зубцов статора;  - угловая ширина межзубцового расстояния статора;
- угловая ширина межзубцового расстояния статора;  - угловая ширина зубцов ротора;
- угловая ширина зубцов ротора;  - угловая ширина межзубцового расстояния ротора;
- угловая ширина межзубцового расстояния ротора;  - радиус полуцилиндра, образующего межзубцовую поверхность ротора;
- радиус полуцилиндра, образующего межзубцовую поверхность ротора;  - линейное расстояние между зубцами ротора; А, В, С, D, Е, F - зубцы статора с обмотками соответствующих фаз; N, S - магнитная полярность соответствующих полюсов.
- линейное расстояние между зубцами ротора; А, В, С, D, Е, F - зубцы статора с обмотками соответствующих фаз; N, S - магнитная полярность соответствующих полюсов.
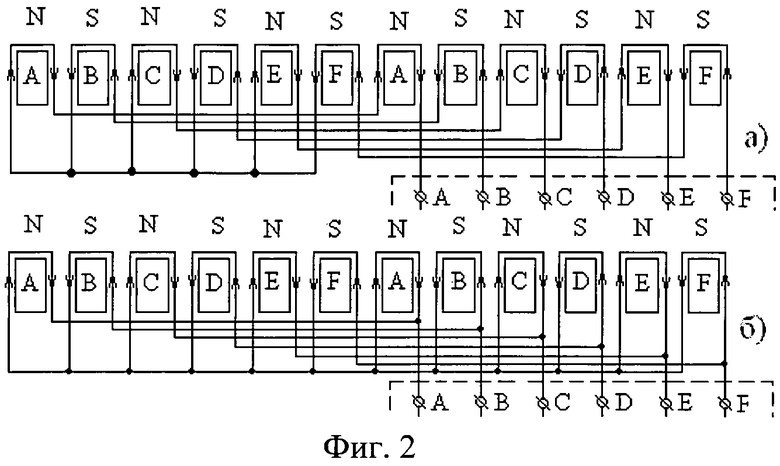
На фиг.2 показана схемы соединения обмоток шестифазного реверсивного вентильно-индукторного двигателя.
На фиг.2 обозначено: а - схема с последовательным соединением полуобмоток противолежащих зубцов статора одной фазы; б - схема с параллельным соединения полуобмоток противолежащих зубцов статора одной фазы.
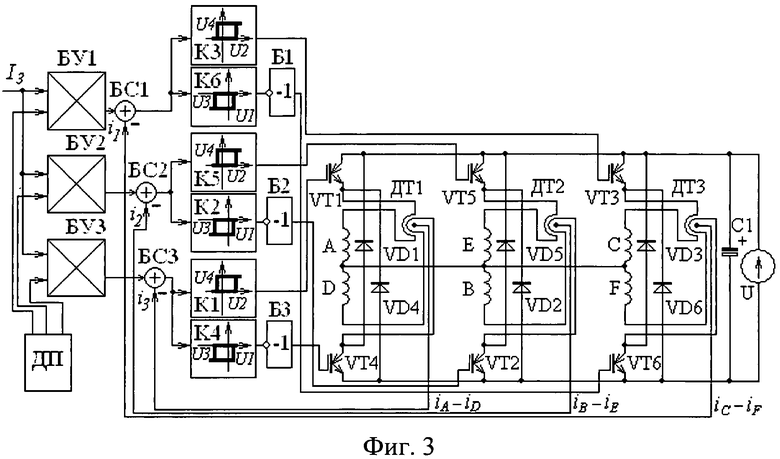
На фиг.3 показана блок-схема регулятора токов фаз шестифазного реверсивного вентильно-индукторного двигателя с инвертором, состоящим из трех полумостовых схем.
На фиг.3 обозначено: Iз - амплитудное значение заданных токов; ДП -датчик положения; БУ1-БУ3 - блоки умножения; i1, i2, i3 - сигналы, пропорциональные текущим значениям токов задания; БС1-БС3 - блоки сравнения токов задания и токов обратной связи; К1-К6 - компараторы с гистерезисом; U1-U4 - уровни срабатывания компараторов; Б1-Б3 - блоки, изменяющие отрицательное напряжение на выходе компараторов К2, К4, К6 на положительное; VT1-VT6 - транзисторы; VD1-VD6 - диоды; А, В, С, D, Е, F - обмотки соответствующих фаз двигателя; ДТ1-ДТ3 - датчики тока; C1 - конденсатор источника напряжения; U - источник напряжения; iA, iB, iC, iD, iE, iF - токи фаз.
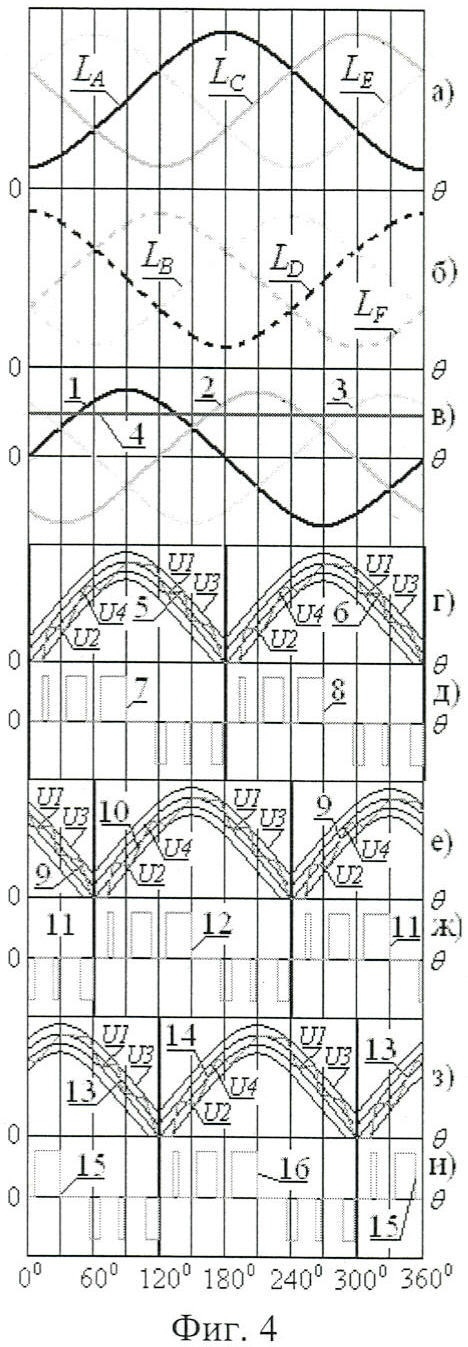
На фиг.4 показаны диаграммы работы блок-схемы управления шестифазным реверсивным вентильно-индукторным двигателем.
На фиг.4 обозначено: а, б - диаграммы индуктивностей фаз реверсивного шестифазного вентильно-индукторного двигателя; LA, LB, LC, LD, LE, LF - соответствующих фаз; в - диаграммы сигналов задания амплитуды токов фаз и сигналов датчика положения; 1, 2, 3 - сигналы трех фаз датчика положения; 4 - задания амплитуды токов фаз; г - диаграммы токов фаз А и D; 5 - диаграмма тока фазы А; 6 - диаграмма тока фазы D; д - диаграммы напряжений фаз А и D; 7 - диаграмма напряжения фазы А; 8 - диаграмма напряжения фазы D; е - диаграммы токов фаз В и Е; 9 - диаграмма тока фазы Е; ж - диаграммы напряжений фаз В и F; 10. - диаграмма тока фазы В; 11 - диаграмма напряжения фазы Е; 12 - диаграмма напряжения фазы В; з - диаграммы токов фаз С и F; 13 - диаграмма тока фазы F; 14 - диаграмма тока фазы С; и - диаграммы напряжений фаз С и F; 15 - диаграмма напряжения фазы F; диаграмма напряжения фазы С.
Использование предлагаемой мехатронной системы в различных промышленных устройствах позволит улучшить технические характеристики оборудования.
Изобретение относится к области электротехники и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем. Технический результат, достигаемый в результате использования настоящего изобретения, по сравнению с известными техническими решениями состоит в уменьшении пульсации момента. Указанный технический результат достигается специальной конфигурацией магнитопровода двигателя и схемой управления, позволяющей формировать однополярные токи фаз, имеющие форму «детектированной синусоиды» и регулируемые по амплитуде при помощи инвертора, состоящего из трех полумостовых схем датчика положения ротора и системы управления. 4 ил.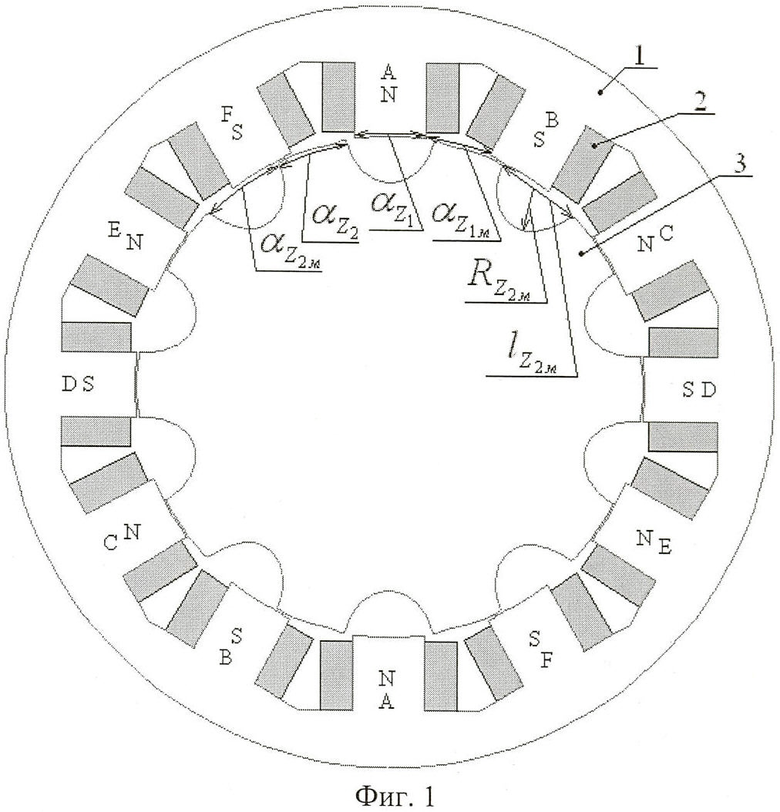
Мехатронная система, содержащая шестифазный вентильно-индукторный двигатель, статор которого имеет число прямоугольных зубцов, кратное шести, и ротор с числом зубцов, меньшим числа зубцов статора на величину этой кратности, датчик положения ротора, инвертор и систему управления, отличающаяся тем, что угловая ширина зубцов статора равна угловой ширине межзубцового расстояния статора, а угловая ширина зубцов ротора равна угловой ширине межзубцового расстояния ротора, поверхность межзубцовой впадины зубцов ротора имеет форму полуцилиндра, радиус которого равен половине линейного межзубцового расстояния зубцов ротора, фазные обмотки соединены в звезду, двигатель управляется токами, имеющими форму «детектированной синусоиды», которые формируются с помощью частотно-токового управления инвертором, содержащим три полумостовые схемы, а форма тока фаз задается датчиком положения.
| ПЛАХ Г.К., ЛОЗИТСКИЙ О.Е., ЛУГОВЕЦ В.А., ПРОТАСОВ Д.А., МУСТАФАЕВ P.P | |||
| Низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов | |||
| Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| МЕХАТРОННАЯ СИСТЕМА | 2006 |
|
RU2324283C1 |

