Настоящее изобретение относится к способу наблюдения для контроля окружающей среды согласно преамбуле пункта 1 формулы изобретения.
Изобретение также относится к системе, приспособленной для того, чтобы осуществлять упомянутый способ наблюдения.
Во многих местах, от общественных зданий до частных компаний, имеется потребность контролировать окружающую среду с целью обнаружения любых аномальных событий, таких как воровство, вандалистские действия, агрессия, грабеж и, в общем, любые события, которые могут подвергнуть риску людей и имущество.
С этой целью обычно используются системы наблюдения, в которых множество датчиков, таких как устройства видеозаписи (например, видеокамеры) или датчики движения (например, инфракрасные или волюметрические датчики), контролируют различные области рассматриваемой окружающей среды.
Информационные сигналы, отправляемые датчиками, (например, видеоизображение помещения или сигнала тревоги с датчика) принимаются станцией контроля, обслуживаемой наблюдателем.
Известные системы наблюдения требуют стадии настройки, которая фокусируется на датчиках.
Во время этой стадии настройки создается модель системы, которая определяет для каждого датчика контролируемую им область и смежные датчики, то есть датчики, которые контролируют границу упомянутой области.
Таким образом, во время процедур слежения система будет следовать за отслеживаемым субъектом, переключаясь с одного датчика на смежный с ним датчик, назначаемый на стадии настройки.
В усовершенствованных системах видеонаблюдения, таких как системы, раскрытые в патентных заявках US 2003/0085992 и WO 2005/120071, этот вид конфигурации предусматривает что, как только некоторая область окружающей среды была выбрана посредством монитора, система автоматически вызовет видеосигнал видеокамеры, ассоциативно связанной с этой областью,
Однако все известные системы наблюдения страдают тем недостатком, что в случае, если датчик неисправен, система будет не в состоянии автоматически восполнить отсутствие этого датчика.
Например, во время выполнения алгоритма слежения, субъект будет потерян, и алгоритм остановится, как только система переключится на неисправную видеокамеру.
Другая проблема, существующая в известных системах наблюдения, возникает в случае, когда два пользователя системы (например, два наблюдателя, использующие две различные станции контроля) хотят наблюдать одну и ту же область контролируемой окружающей среды. Хотя видеосигнал может быть отправлен обеим станциям контроля, управление основной видеокамерой может быть предоставлено только одному пользователю (который обычно выбирается согласно критериям приоритета). В этом случае, второй пользователь должен автономно выбрать другую видеокамеру и управлять ею вручную.
В больших системах, имеющих множественные датчики и видеокамеры, поиск видеокамеры может быть сложной задачей.
Другой недостаток известных систем наблюдения заключается в сложности стадии настройки, на которой установщик оборудования должен указать в системе, какой датчик контролирует некоторую определенную область окружающей среды и какие смежные датчики охватывают границу этой контролируемой области. Пример этой процедуры известен из патентной заявки US 2003/0085992, согласно которой для каждой сцены (места действия), снимаемого видеокамерой установщик оборудования должен указать в системе наименование снимающей видеокамеры и построить таблицу, указав, какая видеокамера охватывает северную границу, какая видеокамера охватывает южную границу, и так далее.
Такого рода конфигурация невыгодна и трудноосуществима в больших системах, содержащих много датчиков.
С целью преодоления этого недостатка патент US 6,437,819 раскрыл процедуру настройки, которая не требует вводить вручную наименования датчиков и смежных датчиков (что могло бы привести к погрешностям).
Однако процедура настройки, описанная в патенте US 6,437,819, имеет тот недостаток, что она требует присутствия установщика оборудования, который следует по соответствующему пути в пределах контролируемой области. Это невыгодно везде, где область, подлежащая контролю, является очень широкой (например, в местах для стоянки автотранспорта, терминалах аэропорта). Кроме того, упомянутая процедура не применима в случае, при котором, некоторые области не доступны для установщиков оборудования, например при модернизации старых систем наблюдения в тюрьмах или установках, которые обрабатывают опасные вещества.
Задача настоящего изобретения заключается в том, чтобы преодолеть проблемы известных систем видеонаблюдения.
В частности задача настоящего изобретения заключается в том, чтобы повысить надежность систем наблюдения, в частности систем видеонаблюдения, обеспечивая динамическую адаптацию системы всякий раз, когда датчик не может быть использован системой.
Эта задача решается посредством способа наблюдения и системы наблюдения, включающих в себя признаки, изложенные в прилагаемой формуле изобретения, которая, как подразумевается, составляет неотъемлемую часть данного описания.
Настоящее изобретение основано на идее исполнения стадии настройки, сфокусированной на окружающей среде, а не на датчиках.
На стадии настройки согласно изобретению установщик оборудования сначала создает модель окружающей среды, определяя множество областей упомянутой окружающей среды, например, место стоянки автотранспорта, главный вход и т.д.
Установщик оборудования затем ассоциативно связывает с каждой областью, по меньшей мере, один датчик в одном или более его возможных положений (предварительно настроенных положениях) и присваивает каждому положению оценку контроля области.
Предпочтительно, чтобы эта оценка контроля соответствовала оценке вероятности обнаружения события, происходящего в ассоциативно связанной области, посредством рассматриваемого датчика, и на рабочей стадии она позволяет выполнять интеллектуальный выбор датчиков для контроля окружающей среды. Для видеокамер оценка контроля, по существу, соответствует оценке обзора области в рассматриваемом предварительно настроенном положении.
Во время рабочей стадии система управления системы наблюдения находит среди всех установленных датчиков те датчики, которые могут быть использованы (например, те датчики, которые не неисправны или не используются другими пользователями) для того, чтобы выполнять функцию наблюдения.
После того, как используемые датчики проверены, система управления управляет одним или более используемыми датчиками, обращаясь к модели, созданной во время стадии настройки системы, и к оценкам контроля, присвоенным оператором различным предварительно настроенным положениям датчиков.
Это делает возможным динамическую ассоциативную связь между областями, подлежащими контролю, и датчиками: если датчик, работающий в интересующей области, будет не готов к использованию (по причине того, что он неисправен или уже используется другим пользователем), то этот датчик не будет приниматься во внимание, и система управления выберет второй датчик в конфигурации, которая является самой подходящей для контроля представляющей интерес области.
В дополнение к этому, в случае, если датчик неисправен, система реорганизует остающиеся датчики, располагая их таким образом, чтобы оптимизировать возможность обнаружения события в пределах окружающей среды с использованием готовых к использованию датчиков. Более конкретно, это стало возможным благодаря тому факту, что выбор датчика зависит не только от его ассоциативной связи с представляющей интерес областью, но также и от оценок контроля, которые, как было сказано выше, представляют вероятность обнаружения события посредством этого датчика.
В частности, упомянутые оценки контроля могут быть использованы для выбора датчика согласно эвристической методике, которая, например, назначает на задачу контроля ячейки готовый к использованию датчик, имеющий самую высокую оценку контроля.
Эти решения позволяют уменьшить вычислительную сложность алгоритмов, используемых для управления датчиками.
В качестве альтернативы, способ согласно изобретению может предусматривать настройку датчиков таким образом, чтобы максимизировать вероятность обнаружения события после определения области, подлежащей контролю, или ограничений, накладываемых на готовые к использованию датчики.
Это позволяет оптимизировать эффективность контроля.
Кроме того, предпочтительно, чтобы система наблюдения имела распределенную архитектуру с множеством компьютеров, поддерживающих связь друг с другом по сети. С каждым компьютером ассоциативно связан набор датчиков.
Это (статистически) уменьшает количество алгоритмов, которые должен одновременно исполнять каждый компьютер, например, для того, чтобы управлять несколькими задачами, запрашиваемыми по различным датчикам, управляемыми одним компьютером.
В предпочтительном решении компьютеры встроены в датчики, которые, таким образом, становятся интеллектуальными и способными поддерживать связь друг с другом для того, чтобы автоматически выбирать свою оптимальную конфигурацию для исполнения задач, запрашиваемых оператором.
Другие задачи изобретения и его преимущества станут более очевидны из нижеследующего описания и из прилагаемых чертежей, которые приведены в качестве неограничивающего примера, на которых:
фиг.1 показана система видеонаблюдения, соответствующая настоящему изобретению;
фиг.2a, 2b и 2c показана модель окружающей среды, используемая системой для активирования видеокамер;
фиг.3a и 3b показана модель окружающей среды, используемая системой для активирования видеокамер.
Архитектура системы наблюдения
На фиг.1 ссылочная позиция (1) в схематичном виде обозначает окружающую среду, подлежащую контролю. Окружающая среда (1) состоит из здания (100) и находящегося на открытом воздухе внутреннего двора (200).
В пределах окружающей среды (1) идентифицированы следующие области, представляющие особый интерес:
- вход в здание: область (C1);
- место (P1) стоянки автотранспорта: область (C2);
- место (P2) стоянки автотранспорта: область (C3);
- входные ворота: область (C4);
Области (C1)-(C4) контролируются четырьмя видеокамерами (S1)-(S4) и одним волюметрическим датчиком (S5), расположенными в пределах окружающей среды, подлежащей контролю.
Количество областей, на которые разделена окружающая среда, и количество датчиков (видеокамер и других датчиков) не являются факторами, ограничивающими изобретение, но зависят от выбора установщика оборудования.
Видеокамеры (S1)-(S4) могут быть неподвижными или подвижными, в частности, типа PTZ (с возможностью поворота/наклона/трансфокации).
В примере, показанном на фиг.1, видеокамеры (S1) и (S3) представляют собой неподвижные видеокамеры и снимают только соответствующие области (C1) и (C3), тогда как видеокамеры (S2) и (S4) представляют собой видеокамеры PTZ-типа, способные снимать области (C1)-(C2) и (C3)-(C4), соответственно.
Волюметрический датчик (S5) представляет собой неподвижный датчик и посылает сигнал тревоги в случае, когда он обнаруживает движение внутри здания (11), например, потому что дверь на входе (С1) открывается.
Датчики соединены с сетью (2) передачи данных, через которую они обмениваются сигналами со станцией (3) контроля, например, видеокамеры (S1)-(S4) отправляют снятые ими изображения.
Сеть (2) передачи данных может представлять собой проводную LAN - сеть (локальную сеть), но конечно же упомянутая сеть передачи данных может также содержать беспроводные элементы, которые могут облегчать установку видеокамер.
Станция (3) контроля содержит компьютер (31), который принимает изображения от видеокамер и отображает их на соответствующих средствах (32) визуализации, приспособленных для того, чтобы отображать множество изображений (33) одновременно.
Предпочтительно, чтобы упомянутые средства визуализации содержали множество экранов или единственный экран, отображающий несколько изображений рядом друг с другом (это решение известно как мультиплексирование).
Станция (3) контроля также содержит другие известные по своей сути компоненты, такие как клавиатура (34), "мышь" (35) и джойстик (36), используемые наблюдателем для того, чтобы управлять видеокамерами PTZ - типа, изменяя углы их поворота, наклона и трансфокации.
Как и средства визуализации, эти компоненты также соединены с компьютером (31), который оснащен соответствующими интерфейсами, например, интерфейсом для джойстика (36), видеоинтерфейсами для отправки изображений, принятых от видеокамер (S1)-(S4), средствам (32) визуализации, и сетевым интерфейсом, через который управляющие данные отправляются видеокамерам.
Этот пользовательский интерфейс, наряду с клавиатурой, джойстиком и "мышью", позволяет пользователю выбирать и управлять видеокамерами, активируя, таким образом, передачу изображения от одной или более видеокамер средствам (32) визуализации.
Когда выбрана какая-либо из областей (C1)-(C4), например, место стоянки (P2) автотранспорта, то изображение передается от видеокамеры, например. (S2), которая автоматически ассоциативно связана с выбранной областью согласно предварительно заданному критериальному нацеливанию, которое описано ниже, при максимизации вероятности обнаружения аномального события внутри представляющей интерес области,
Подробности об интерфейсе, который позволяет вызывать видеокамеры, будут описаны позже в специализированном разделе.
В примере, показанном на фиг.1, архитектура системы относится к централизованному типу, при котором один компьютер (31) исполняет алгоритма вычисления, требующийся для того, чтобы управлять датчиками и выполнять функции наблюдения, такие как отслеживание субъектов, перемещающихся в пределах этой окружающей среды, запись видеоряда и автоматического обнаружение события. Также возможны еще и другие решения; например, система наблюдения может быть предусмотрена в форме распределенной системы, как та, что описана позже в разделе, озаглавленном "Вариант с системой управления, имеющей распределенную архитектуру".
Настройка системы
Согласно изобретению во время стадии настройки системы наблюдения создается модель окружающей среды путем определения представляющих интерес областей (С1)-(С4) окружающей среды и их смежностей.
В нижеследующем описании области упомянутой модели будут именоваться 'ячейками' для того, чтобы избежать какой-либо путаницы с физическими областями окружающей среды.
Вслед за этим каждая ячейка (C1)-(C4) ассоциативно связывается с одним или более датчиками, способными контролировать, по меньшей мере, участок области, соответствующей этой ячейке.
В частности, поскольку видеокамеры PTZ - типа могут принимать множество положений, то каждая ячейка ассоциативно связывается не только с видеокамерой, но с видеокамерой в некотором данном положении (именуемом "предварительно настроенном").
Конечно, для неподвижных видеокамер или датчиков имеется только одно предварительно определенное положение, которое задается при установке датчика.
Во время стадии настройки датчики последовательно активируются.
Для каждой подвижной видеокамеры или датчика оператор определяет предварительно настраиваемые положения подвижного датчика, которые наилучшим образом удовлетворяют потребностям оператора при наблюдении.
Для каждого предварительно настроенного положения оператор ассоциативно связывает посредством средства выбора датчик с областью окружающей среды и присваивает оценки контроля (например, выраженные как значение между 0 и 1), представляющие качество полученного изображения.
Оценки контроля соответствуют оценке вероятности обнаружения, посредством упомянутого датчика, события, происходящего в пределах ячейки, с которой этот датчик был ассоциативно связан в определенном предварительно настроенном положении.
На рабочей стадии это позволяет управлять датчиками, помещая их в эти предварительно настроенные положения, что максимизирует возможность контроля окружающей среды.
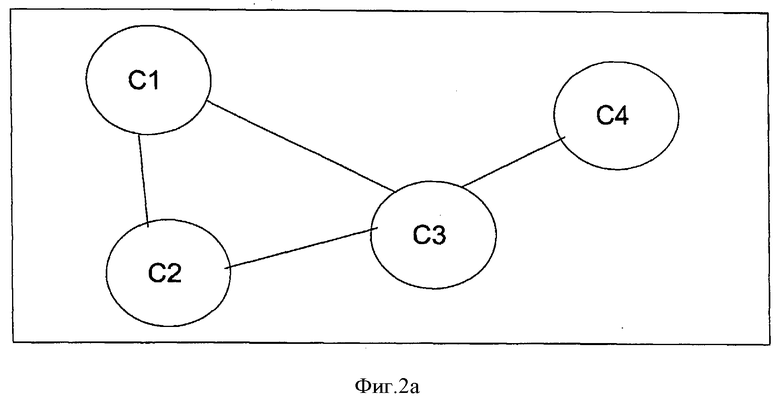
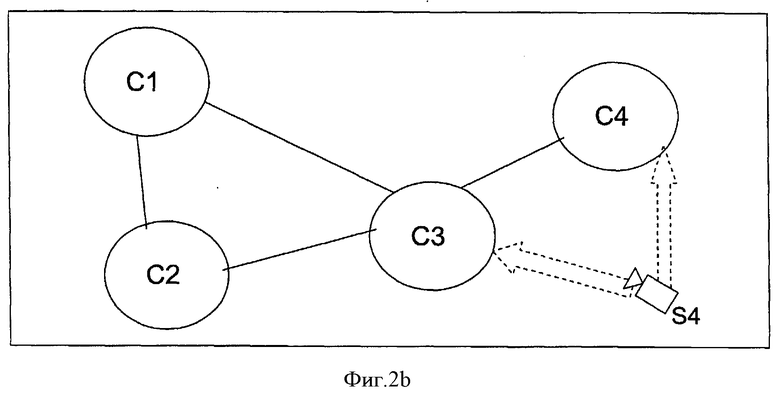
Примеры, показанные на фиг.2a-2c и 3a-3b, иллюстрируют две различные модели окружающей среды, которые используются пользовательским интерфейсом для показа окружающей среды, подлежащей контролю, установщику оборудования и для того, чтобы позволить ему выбрать область.
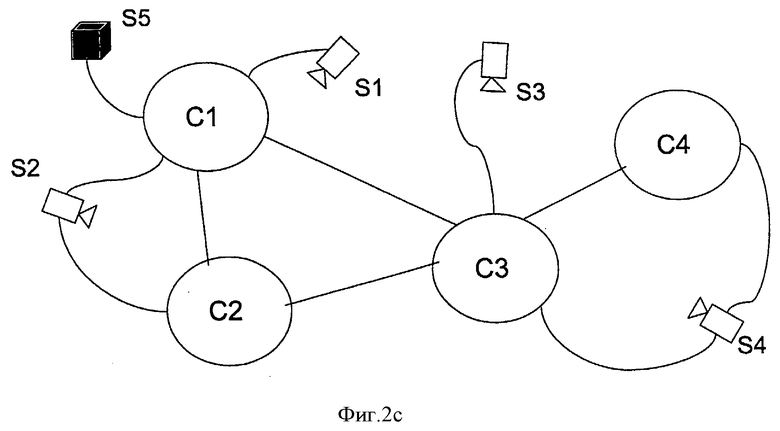
Согласно примеру, показанному на фиг.2a, 2b и 2c, программа, обеспечивающая пользовательский интерфейс, позволяет определять список ячеек и их соединений посредством графического интерфейса, который позволяет построить граф, в котором ячейки представлены как узлы, соединенные дугами.
Предпочтительно, чтобы пространственное расположение узлов было свободным, так чтобы во время стадии настройки оператор мог располагать их таким образом, чтобы отразить географическое расположение областей, подлежащих контролю, что позволяет наблюдателю немедленно находить область, подлежащую контролю, во время рабочей стадии.
Согласно альтернативному решению, которое является менее сложным с вычислительной точки зрения, но немного менее удобным для пользователя, определение областей и их соединений может быть выполнено в текстовом режиме.
Вновь обратимся к примеру, показанному на фиг.2a-2c, согласно которому на стадии настройки оператор создает модель окружающей среды и затем последовательно активирует датчики (например, циклы видеокамер). Для каждого датчика оператор проверяет контролируемую область (например, он видит изображение, полученное видеокамерой, на экране), и создает соединение с областями модели, присваивая при этом оценки контроля.
Соединение датчика/области может быть выполнено вычерчиванием связи между значком, представляющим датчик, и блоком, представляющим заключенную в рамку область.
Таким образом, создается граф "ячейки/датчики", аналогичный графу, показанному на фиг.2c.
Предварительную настройку датчика и оценку контроля программное обеспечение сохраняет в базе данных системы управления.
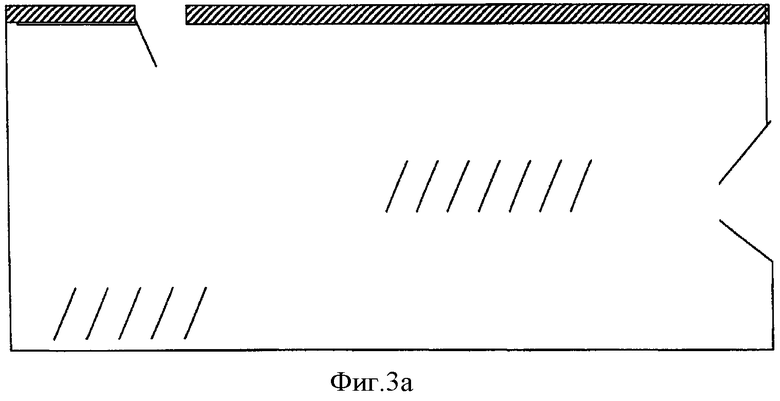
В примере, показанном на фиг.3a-3b, модель окружающей среды состоит из карты (схемы) области, подлежащей контролю.
Карта, показанная на фиг.3а, может быть построена оператором электронным образом с использованием обычных графических программ, или она может представлять собой импортированный графический файл.
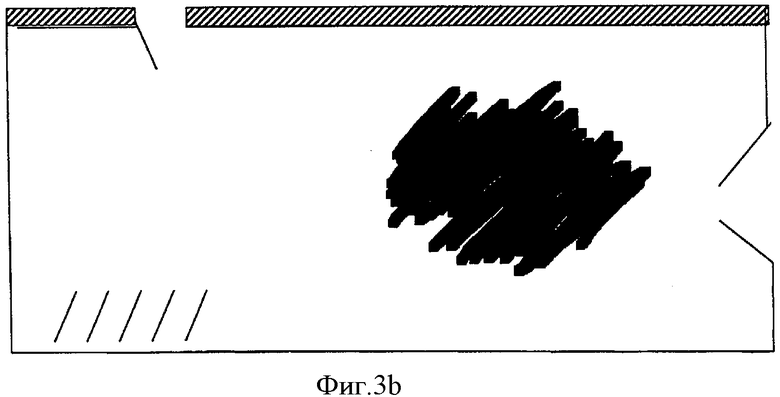
В решении, показанном на фиг.3a-3b, во время стадии настройки оператор выбирает датчик и, для каждого предварительно настраиваемого положения, отмечает контролируемую область на карте, как это показано на фиг.3b, и ассоциативно связывает с ней оценку контроля, например, печатая значение на клавиатуре (34) или выбирая отображаемое значение "мышью" (35).
Когда выбрана совокупность пикселей, соответствующая области, контролируемой датчиком, программное обеспечение автоматически создаст ячейки модели и соответствующие смежности.
В варианте реализации изобретения каждый выбор пикселей соответствует одной ячейке модели.
Соседние совокупности пикселей представляют собой смежные ячейки.
В предпочтительном варианте реализации изобретения совокупности пикселей, перекрывающие друг друга в достаточной мере, группируются в единственную ячейку.
Критерий, используемый для принятия решения о том, должны ли две совокупности пикселей быть сгруппированы в единственную ячейку или нет, определяется во время стадии программирования: если две совокупности пикселей только соприкасаются, то, на самом деле, может быть предпочтительным сохранить эти две ячейки раздельными.
Геометрическая информация, связанная с каждой ячейкой, (площадь, форма) и информация о направлении перехода между ячейками извлекается автоматически.
В карту могут быть включены барьеры, которые будут учтены при расчете смежностей; например, два несообщающихся между собой помещения не являются смежными друг другу.
После того, как модель построена, пользователем может быть добавлена и другая информация (метки ячеек, подвижность области, зависящие от времени барьеры, ориентация дуг и т.д.).
Когда настройка закончена, система управления вычертит граф "ячейки/датчики", аналогичный графу, показанному на фиг.2c.
Алгоритм для оптимального охвата
После стадии настройки, система управления готова начать рабочую стадию наблюдения окружающей среды.
При заданной представляющей интерес области и наборе датчиков, цель заключается в том, чтобы контролировать упомянутую область, выбирая наиболее подходящие датчики и управляя ими наиболее соответствующим образом.
Это выливается в максимизацию вероятности обнаружения аномального события, происходящего в пределах данной представляющей интерес области.
В частности, предположим, что представляющая интерес область является набором, состоящим из N ячеек модели окружающей среды, построенной во время стадии настройки.
Ci обозначает аномальное событие, происходящее в ячейке i.
Система наблюдения содержит M датчиков, при этом xj обозначает положение датчика j.
В частности для датчиков PTZ - типа (с возможностью поворота/наклона/трансфокации) положение может принимать значения в пределах конечного дискретного набора значений, именуемых "предварительной настройкой".
Неподвижный датчик можно рассматривать как особенный датчик PTZ - типа с лишь одной предварительной настройкой.
В общем случае положение датчика может принимать значения в пределах непрерывной области значений и может содержать географические координаты для датчиков, расположенных на подвижных средствах (патрульных автомашинах, роботах, и т.д.).
Для обнаружения события, обозначенного D, выражение

указывает вероятность обнаружения аномального события при том условии, что это событие происходит только в одной из N ячеек, ассоциативно связанных с участком окружающей среды, подлежащим контролю, и что М датчиков имеют определенную предварительную настройку xj.
Задача оптимального охвата данной области, следовательно, выливается в обнаружение оптимальной конфигурации датчиков, которая максимизирует упомянутую вероятность. Упомянутая конфигурация может быть выражена следующим образом:

Вероятность обнаружения может быть выражена следующим образом:

Вышеприведенное выражение получено с использованием того непосредственного наблюдения, что наличие события в ячейке i не зависит от положения M датчиков, то есть, p(Ci|x1,…xM)=p(Ci).
Вероятность p(Ci) того, что событие происходит в данной ячейке i, может быть пропорциональна размеру соответствующей области и важности, которая характеризует ячейку с точки зрения наблюдения.
Для простоты, ниже будет принято, что все области модели имеют одинаковые вероятности; таким образом, выражение вероятности обнаружения примет вид:

где p(Ci|x1,…,xM) представляет собой вероятность обнаружения события, причем последнее происходит в ячейке i, а датчики имеют некоторую предварительную настройку xj.
Теперь рассмотрим случай, при котором за данной ячейкой наблюдает один датчик системы наблюдения, например, датчик (1).
Таким образом, получается, что p(D|Ci,x1,…,xM)=p(D|Ci,x1) то есть, обнаружение в ячейке i, не зависит от положения тех датчиков, которые не контролируют ячейку i.
Принимается, что p(D|Ci,x1) представляет собой оценку контроля, присвоенную установщиком оборудования, при настройке системы наблюдения. Если описать это более подробно, то упомянутая оценка контроля представляет собой оценку, которая была присвоена датчику (1) в положении x1, когда он был ассоциативно связан с ячейкой i.
Вполне разумно предположить, что если оценка контроля является высокой, то вероятность обнаружения события в данной области модели также будет высокой. Наоборот, если бы оценка составляла ноль, то было бы невозможным (нулевая вероятность) добиться обнаружения в данной ячейке посредством датчика (1) с предварительной настройкой x1.
Теперь рассмотрим случай, при котором, за ячейкой i наблюдают множественные датчики с соответствующей предварительной настройкой.
В целях помощи установщику оборудования вышеописанная процедура настройки не предусматривает сводную информацию контроля.
По этой причине в отсутствие такой информации будет учтен самый плохой случай: определяется датчик, имеющий самый хороший обзор, и предполагается, что другие датчики не могут добавить никакой информации, которая может улучшить обзор данной области модели. Таким образом, получают что:

Теперь рассмотрим следующий пример. Два датчика (s1) и (s2), располагающиеся в x1 и x2, наблюдают данную ячейку Ci с оценками обзора, составляющими 0,8 и 0,6, соответственно.
Предполагается, что другие датчики не видят данную ячейку ни при какой предварительной настройке, или что они имеют предварительные настройки, при которых они не могут видеть данную ячейку.
Таким образом, получается что P(D|Ci,x1)=0.8, p(D|Ci,x2)=0.6, p(D|Ci,xj)=0 j>2 и что, из предшествующего выражения, p(D/Ci,x1,x2,…,xM)=0.8.
При преобразовании (4) на основе этого предположения будет, таким образом, получено что:

где p(D|Ci,xj) представляет собой оценку контроля, с которой датчик j при предварительной настройке xj контролирует ячейку Ci. Вышеупомянутое выражение строгим образом количественно определяет качество охвата данной области, позволяя, таким образом, сравнивать различные конфигурации датчиков, используемых для этой цели.
Оптимальную конфигурацию  ,
,  , …,
, …,  можно искать среди всех возможных конфигураций таким образом, как это разъясняется ниже.
можно искать среди всех возможных конфигураций таким образом, как это разъясняется ниже.
Алгоритм, который позволяет найти оптимальную конфигурацию, начинается с информации, содержащейся в графе "ячейки/датчики" (фиг.2c), построенном при настройке системы наблюдения.
Для каждой ячейки имеется одна или более дуг, которые связывают ячейку с датчиками, которые ее контролируют.
Для каждой дуги имеется порция информации, указывающая предварительную настройку датчика. Принимая во внимание все ячейки области, подлежащей охвату, можно построить набор датчиков, используемых для получения упомянутого охвата, с соответствующими предварительными настройками.
Оптимальной конфигурацией  ,
,  , …,
, …,  датчиков является конфигурация, которая максимизирует вероятность обнаружения; следовательно, в предпочтительном решении алгоритм продолжается вычислением (6) для каждой комбинации датчиков и затем выбирает комбинацию датчиков, имеющую самую высокую вероятность обнаружения.
датчиков является конфигурация, которая максимизирует вероятность обнаружения; следовательно, в предпочтительном решении алгоритм продолжается вычислением (6) для каждой комбинации датчиков и затем выбирает комбинацию датчиков, имеющую самую высокую вероятность обнаружения.
Это станет понятно из нижеследующего примера: даны три ячейки C1, C2, C3; ячейка C1 видна датчику (1) при предварительной настройке 



Диапазон возможных конфигураций состоит из пар 

Конечно же, конфигурация наподобие 
После того как были определены две возможных конфигурации, алгоритм рассчитывает вероятности обнаружения, соответствующие упомянутым двум конфигурациям.
Предположим теперь, что все оценки контроля равны 1, за исключением оценки для предварительной настройки 
В этих условиях первая конфигурация 
Тогда как вторая конфигурация 

Алгоритм затем сравнивает эти две рассчитанные вероятности обнаружения и выбирает конфигурацию 
Из вышеприведенного описания очевидно, что, если количество возможных конфигураций является большим, то поиск оптимальной конфигурации может представлять собой тяжелую вычислительную задачу.
В таком случае могут быть применены способы исследования операций для того, чтобы получить субоптимальное решение.
Эти способы, хотя и основываются на оценках контроля и на графе "ячейки/датчики", минимизируют соответствующую функцию стоимости, получаемую из вероятности обнаружения.
В качестве альтернативы, вычислительная сложность может также быть уменьшена путем введения эвристических методик; например, можно принять решение устанавливать каждый датчик в положение, которое имеет самую высокую оценку контроля, так, чтобы контролировать одну или более ячеек, которые видны только этому датчику.
Будучи установленными, эти эвристические методики являются независимыми от вычисления вероятности обнаружения, даже притом, что эта вероятность может при разработке алгоритма использоваться для сравнения эффективности различных эвристических методик: если предлагается несколько эвристических методик, то вычисление вероятности обнаружения позволит установить, какая конфигурация из числа тех, что предложены согласно эвристическим методикам, является наиболее подходящей для обнаружения событий.
Оптимальный охват с самым низким количеством датчиков
Задача оптимального охвата, обсуждаемая в предшествующем разделе, может быть дополнена ограничением, состоящем в необходимости использовать наименьшее возможное количество датчиков.
Алгоритм для вычисления оптимального охвата с самым низким количеством датчиков также основывается на предположении, что вероятность обнаружения события в ячейке не увеличивается с количеством датчиков, используемых для охвата этой ячейки. Таким образом, предполагается что:

Следовательно, алгоритм только рассматривает только датчик, имеющий самую высокую оценку контроля среди всех тех датчиков, которым видна та же самая ячейка.
Датчики, имеющие более низкую оценку, рассматриваются как избыточные. Хотя с практической точки зрения может быть полезно добавлять информацию от большего количества датчиков (например, добавлять кадры области) для того, чтобы до некоторой степени улучшить эффективность контроля, тем не менее, существуют ситуации, в которых важно, чтобы не принималась никакая избыточная информация: оператор, получающий избыточную информацию, будет оценивать то, что происходит в контролируемой сцене, более медленно и с большей трудностью.
Не менее важно и то, что использование минимального количества ресурсов в многопользовательской и многозадачной системе увеличит возможность одновременного обслуживания большего количества операторов и задач.
Оптимальное решение при наличии вышеупомянутого ограничения находят, рассматривая все возможные подмножества глобального множества датчиков, подлежащих использованию для оптимального охвата.
Для каждого подмножества оптимальную предварительно настроенную конфигурацию находят таким образом, как это описано в предшествующем разделе "Алгоритм для оптимального охвата".
Решение данной задачи представлено множеством с минимальным количеством элементов, имеющим самую высокую вероятность обнаружения.
Следует отметить, что нет необходимости принимать во внимание все возможные подмножества датчиков: когда вероятность обнаружения для оптимального решения, отыскиваемого в подмножествах датчиков, имеющих количество (N) элементов, равна оптимальной вероятности обнаружения, отыскиваемой в подмножествах, имеющих количество (N-1) элементов, то оптимальное решение будет представлять собой конфигурацию с N-1 датчиками.
Следовательно, предпочтительно, чтобы способ предусматривал поиск решения задачи оптимального охвата в подмножествах датчиков с увеличивающимся количеством элементов.
Изменяющийся во времени оптимальный охват
Рассмотрим теперь ситуацию, при которой оптимальное решение не может обеспечить охват всей этой окружающей среды, например, потому что количество готовых к использованию датчиков довольно мало.
Для того, чтобы контролировать всю эту окружающую среду, выполняется задача, именуемая 'патрулированием', которая содержит нижеследующие этапы.
Прежде всего, рассчитывается конфигурация, которая максимизирует вероятность обнаружения события, происходящего в пределах этой окружающей среды; это достигается посредством алгоритма оптимального охвата, обсужденного выше в разделе с таким же названием.
Посредством действия упомянутого алгоритма, датчики располагаются таким образом, чтобы контролировать количество (X) ячеек, которое меньше чем общее количество ячеек (которое принимается равным количеству N).
Эта конфигурация сохраняется в течение предварительно заданного времени, после чего алгоритм оптимального охвата применяется к N - Х ячейкам, которые не контролировались датчиками ранее рассчитанной конфигурации.
Новая конфигурация датчиков сохраняется в течение предварительно заданного времени, которое в предпочтительном варианте задается оператором.
Если новая конфигурация не охватывает все ячейки, то способ вновь применит алгоритм оптимального охвата к остающимся ячейкам и будет сохранять новую конфигурацию в течение предварительно заданного времени.
Процедура повторяется до тех пор, пока не будут охвачены все ячейки.
Имеется возможность, что при максимизации вероятности обнаружения события в прогрессивно уменьшающемся количестве ячеек будут найдены конфигурации, которые включают в себя избыточные датчики; по этой причине может быть выгодно использовать алгоритм оптимального охвата при том ограничении, что должно быть использовано самое низкое количество датчиков.
Таким образом, любые датчики, которые являются избыточными при охвате выбранных ячеек, будут использоваться для охвата ячеек, уже наблюдавшихся на предшествующих этапах, так чтобы максимизировать вероятность обнаружения в пределах этой окружающей среды. Как будет подробно разъяснено ниже, в традиционных системах видеонаблюдения, патрульная функция использует циклическую работу независимых датчиков в их соответствующих предварительных настройках и не взаимодействующих между собой для охвата контролируемой области.
Оптимальный охват границ
Системы наблюдения обеспечивают функцию, именуемую 'отслеживание объекта', то есть, отслеживание движущегося объекта в пределах контролируемой окружающей среды.
Ячейка, занятая этим объектом называется "активной ячейкой", в то время как смежные ячейки называются "пограничными ячейками".
Смежности между ячейками определены в графе "ячейки/датчики", построенном при настройке системы.
Для того, чтобы не потерять объект, в то время как датчик спозиционирован на активную ячейку, другие датчики сконфигурированы таким образом, чтобы обеспечивать оптимальный охват пограничной области.
Цель алгоритма оптимального охвата границ заключается в том, чтобы максимизировать нижеследующую вероятность

Упомянутая вероятность соответствует вероятности обнаружения события при условии, что событие исходит из ячейки k и происходит в одной из N ячеек Ci, пограничных по отношению к ячейке k, и что M датчиков находятся в определенных положениях xj.
При условиях, подобных описанным для вычисления оптимального охвата, вероятность обнаружения определяется следующим соотношением:

где p(D|Ci,xj) представляет собой оценку контроля для датчика j с предварительной настройкой xj, наблюдающего за ячейкой Ci, в то время как p(Ci|Ck) представляет собой вероятность того, что объект движется из активной ячейки в предположительно существующую пограничную ячейку i.
Согласно предпочтительному варианту реализации изобретения, при создании модели окружающей среды во время стадии настройки необходимо определить вероятности перехода из одной ячейки в другую.
Эти вероятности соответствуют экземплярам p(Ci|Ck) в вышеупомянутой формуле.
Если информация о вероятности перехода из одной ячейки в смежную ячейку не указана, как в примере варианта реализации изобретения, описанном со ссылкой на фиг.2a-2c и 3a-3b, то все экземпляры  равны и соотношение для вычисления вероятности обнаружения события в пограничной ячейке будет определяться формулой:
равны и соотношение для вычисления вероятности обнаружения события в пограничной ячейке будет определяться формулой:

Наконец, поскольку охват границы представляет собой частную задачу оптимального охвата, его можно также осуществлять с использованием методик изменяющегося во времени охвата, подобных той, что описана в разделе "Изменяющийся во времени оптимальный охват".
Динамическое взаимодействие и переконфигурирование датчиков
В данной системе наблюдения набор датчиков, которые могут участвовать в задаче по обеспечению оптимального охвата данной области, будет изменяться в течение времени вследствие различных приоритетов у задач, подлежащих выполнению и у различных операторов, их запрашивающих.
В порядке примера, существует возможность, что, в то время как система выполняет функцию "патрулирования" по проверке окружающей среды, оператор запрашивает управление видеокамерой; если оператор имеет приоритет над автоматической процедурой патрулирования, то ясно, что упомянутая процедура должна будет выполняться без видеокамеры, которой управляет оператор.
Кроме того, любые неисправные датчики будут со временем изменять набор готовых к использованию датчиков.
Для того, чтобы справляться с этими ситуациями, система рассчитывает оптимальную конфигурацию для охвата данной области каждый раз, изменяется набор датчиков, участвующих в охвате.
Например, когда количество видеокамер, которые могут быть использованы для задачи, уменьшается, остающиеся видеокамеры, охватывающим данную область, будут управляться таким образом, чтобы обеспечивать более широкие кадры при трансфокации, или в соответствии с процедурой изменяющегося во времени охвата (которая, описана выше), которая будет изменять кадрирование во времени таким образом, чтобы охватывать все ячейки.
В этом последнем случае время неизменного пребывания датчиков в данной конфигурации можно уменьшать для того, чтобы обеспечить надлежащий охват.
Наоборот, если количество датчиков увеличивается, то используемые конфигурации датчиков будут нацелены на охват меньших областей, например, видеокамеры с более высокими уровнями трансфокации, при увеличении времени неизменного пребывания каждого датчика в определенном предварительно настроенном положении.
Таким образом, способ наблюдения согласно изобретению делает возможным динамическое переконфигурирование датчиков.
Система управления системой наблюдения, будь то централизованной (как на фиг.1) или распределенной (как описывается ниже в разделе "Вариант с системой управления, имеющей распределенную архитектуру"), проверяет, какими датчиками она располагает, и решает, в какой задаче они должны участвовать.
Например, в случае, когда отслеживается некоторое событие, как только объект был обнаружен в активной ячейке, датчики, которые контролируют границу, конфигурируются таким образом, чтобы обеспечивать наилучший охват границы. Этими датчиками управляют затем согласно алгоритму оптимального охвата границ.
Остальные датчики выделяются задаче оптимального охвата для остающихся ячеек, и, таким образом, конфигурируются так, чтобы максимизировать вероятность обнаружения события в остальных ячейках.
Динамическое конфигурирование датчиков стало возможным благодаря тому факту, что задача охвата сформулирована как функция окружающей среды и графа "ячейки/датчики", а не смежностей датчиков.
Этот подход приносит в выбор датчиков некоторые степени свободы в том, что область может быть охвачена различным образом с использованием датчиков в различных конфигурациях.
Эти степени свободы позволяют управлять теми ситуациями, при которых датчики, участвующие в задаче охвата, могут варьироваться.
Охват границ представляет собой более широкую форму взаимодействия, которая, в дополнение к взаимодействию, нацеленному на достижение оптимального охвата границ, также обеспечивает взаимодействие между активным датчиком и датчиками границ. Когда активный датчик или положение данного активного датчика изменяется, граница также изменится наряду с охватывающими ее датчиками и их конфигурацией. Эта функциональная возможность именуется "помощь в навигации" и будет описана подробно в следующем разделе.
Помощь в навигации
Система наблюдения согласно изобретению выполняет функцию, именуемую "помощь в навигации", которая обеспечивает простое и эффективное отслеживание движущихся объектов в пределах этой окружающей среды.
Отслеживание перемещений объекта (отслеживание объекта) представляет собой трудную задачу и, как известно, ставит множество проблем, связанных с выбором активной камеры (камеры, которая формирует кадры с объектом), и с переключением с активной камеры на другую камеру, активируемую для того, чтобы продолжать отслеживание объекта.
Функция помощи в навигации является решением упомянутых проблем.
После обнаружения события (автоматически или оператором), оператор выбирает камеру, снимающую это событие, и включает функцию навигации.
Алгоритм помощи в навигации определяет датчик, выбранный оператором (активный датчик), при этом идентифицируя его и получая данные о его расположении (ориентации в пространстве).
Посредством графа "ячейки/датчики", построенного во время стадии настройки, навигационный алгоритм определяет участок окружающей среды, контролируемый на этот момент активным датчиком, (активную зону), рассчитывая набор ячеек, которые формируют активную зону.
Когда датчик, который контролирует активную ячейку, управляется вручную оператором, как это имеет место в случае датчика PTZ - типа, последний может находиться в положении, отличном от предварительно настроенных положений, записанных при настройке; это объясняется тем фактом, что датчик PTZ - типа может перемещаться среди по существу непрерывного множества положений, тогда как способ согласно изобретению требует, чтобы (при настройке) было записано дискретное количество положений.
На основе соответствующих показателей алгоритм приблизительно рассчитывает предварительно настроенное положение, которое является самым близким к положению, установленному оператором.
Начиная с предварительно настроенного положения, вычисленного таким образом, алгоритм затем получает границу активной зоны, то есть набора ячеек, не принадлежащих активной зоне, но смежных с ней.
Вычисление активных ячеек и границы является динамическим; следовательно, если активный датчик изменяет свое положение, то алгоритм помощи в навигации повторит это вычисление и, соответственно, обновит границу.
Используя алгоритма оптимального охвата границы, алгоритм помощи в навигации выбирает наиболее подходящие датчики и располагает их таким образом, что максимизируется контроль границы активной зоны. Среди всех датчиков в системе эта процедура выбирает только те датчики, которые потенциально могут обнаружить объект, если последний существует в активной зоне, то есть в зоне действия активного датчика.
Если датчики представляют собой видеокамеры, то функциональные возможности помощи в навигации, предусматривают одновременное отображения изображения с активной камеры и изображений с камер, которые контролируют границу, (смежных камер).
Когда объект выходит из зоны видимости активной камеры, если граница полностью контролируется, то он появится на одном из изображений со смежных камер. Обнаружение объекта на одном из смежных изображений является простой задачей для оператора, который может, таким образом, легко определить местонахождение новой активной видеокамеры и, возможно, взять ее под свое управление.
Предпочтительно, чтобы изображения, снятые видеокамерами отображались на сенсорном экране.
В этом варианте реализации изобретения оператор, прикасаясь к изображению, содержащему объект, генерирует сигнал, который используется алгоритмом помощи в навигации для идентификации видеокамеры, которая ответственна за выбранное изображение, и для исполнения, с помощью упомянутой информации, вышеописанных этапов алгоритма.
Если граница не контролируется полностью, то вероятность потери объекта минимизируется при использовании для задачи оптимального охвата остальных ячеек тех датчиков, которые не используются задачей навигации.
Последовательность изображений для области
Другая функция, предоставляемая системой наблюдения согласно настоящему изобретению, называется "последовательностью изображений для области".
Эта функция позволяет преодолевать недостатки известных последовательностей, которые показывают изображения, снимаемые видеокамерами системы, поодиночке, согласно последовательности, определенной оператором при настройке.
Способ согласно изобретению требует, чтобы во время стадии настройки оператор поочередно выбирал область, подлежащую контролю.
Выбор области может быть выполнен посредством выделения участка на электронной карте или указания набора ячеек, образующих представляющую интерес область.
На данном этапе, оператор должен только указать область, подлежащую контролю, продолжительность планов и, если требуется, направление охвата.
Предпочтительно, чтобы оператор не давал никаких указаний о датчиках, подлежащих использованию для создания последовательности; однако, оператор может устанавливать ограничения на выбор одного или более датчиков.
На основе этой информации в способе исполняется алгоритм оптимального охвата при том ограничении, что должны использоваться только видеокамеры, а в предпочтительном варианте также и при том ограничении, что должно использоваться самое низкое количество видеокамер, при этом определяется конфигурация камер, которая охватит область, указанную оператором.
Как обсуждалось выше, алгоритм оптимального охвата принимает во внимание приоритеты и готовность датчиков к использованию: если датчик занят, выполняя другую задачу, то алгоритм выполнит вычисления, рассматривая только готовые к использованию датчики.
Вычисление датчика является динамическим и зависит от операций, для которых используются датчики.
После выбора набора датчиков, которые будут участвовать в последовательности, необходимо определить порядок во времени для последовательности отображаемых изображений.
В варианте реализации изобретения оператор указывает порядок съемки для ячеек, ассоциативно связанных с областью, подлежащей контролю в этой последовательности.
В предпочтительном варианте реализации изобретения алгоритм последовательности изображений для области исполняет конечный этап вычисления, определяя порядок во времени, согласно которому будут активироваться датчики.
Это конечное вычисление выполняется с использованием информации о положениях датчиков, содержащихся в графе "ячейки/датчики".
Предпочтительно, чтобы алгоритм обеспечивал пространственную непрерывность различных изображений, так что датчики, снимающие смежные ячейки, будут соседствовать в этой последовательности.
Вышеописанный способ последовательности изображений для области позволяет вычислять последовательность датчиков, задействуемых в этой последовательности изображений для области, автоматически, позволяя, таким образом, преодолевать ограничения по эффективности, присущих последовательностям, задаваемым оператором вручную.
Кроме того, вышеописанный способ последовательности изображений для области обеспечивает динамический выбор датчиков, так что имеется возможность выполнять субоптимальную последовательность, которая охватывает представляющую интерес область даже при наличие конфликтов, вызванных многопользовательской и многозадачной средой, например, в случае, когда два пользователя или две задачи запрашивают один и тот же датчик одновременно.
Пользовательский интерфейс
Изобретение использует усовершенствованный интерфейс, который позволяет оператору быстро и эффективно контролировать всю окружающую среду.
Интерфейс показывает оператору модель окружающей среды в форме графа "ячейки/датчики" (фиг.2с) или электронной карты.
Это позволяет оператору вызывать изображения области простым выбором соответствующей ячейки в графе "ячейки/датчики" или указывая на нее при помощи "мыши" или дотрагиваясь до нее (в случае, если используется сенсорный экран) на электронной карте.
Это обеспечивает быстродействующее наблюдение, потому что наблюдатель может быстро и интуитивным образом сконцентрироваться на изображении представляющей интерес области.
Выбор пользователя считывается интерфейсом и отправляется системе управления, которая затем вызывает изображения (или говоря в общем, информацию) одного или более датчиков, которые контролируют выбранную область.
Датчики выбираются согласно выбранной области и согласно предпочтениям оператора, который может, например, принять решение отображать единый кадр области или исполнять оптимальный охват области.
Эти предпочтения могут быть заданы, например, посредством раскрывающегося меню, которое может быть открыто щелчком правой кнопки "мыши" на представляющей интерес области.
Вариант с системой управления, имеющей распределенную архитектуру
Вышеописанная система и способ наблюдения предусматривают многопользовательский и многозадачный контроль.
Следовательно, имеется возможность, что в некоторый данный момент времени запрашиваются множественные задачи, такие как оптимальный охват различных областей окружающей среды, или что активируются вышеописанные функция навигации и функция последовательности изображений для области.
Таким образом, очевидно, что вычислительная мощность системы должна быть достаточной для того, чтобы выдерживать вычислительную сложность, проистекающую из одновременной активации множественных алгоритмов.
В больших системах наблюдения со многими датчиками, с такой вычислительной сложностью не так легко справиться при помощи системы управления, имеющей централизованную архитектуру, как система управления, показанная на фиг.1.
В предпочтительном варианте реализации изобретения система управления, которая исполняет алгоритмы различных задач, является распределенный системой, то есть она состоит из множества компьютеров, поддерживающих связь друг с другом по сети передачи данных.
Большое количество компьютеров также обеспечивает хороший уровень резервирования в случае любых отказов.
Предпочтительно, чтобы компьютеры были расположены в различных и удаленных друг от друга местах для того, чтобы обеспечивать более высокий уровень защищенности от любых атак, направленных на их физическое уничтожение.
Согласно этому варианту реализации изобретения модель окружающей среды и граф "ячейки/датчики", построенный во время стадии настройки хранятся в памяти во всех компьютерах, так что каждый компьютер может автономно выполнять вышеописанные алгоритмы охвата.
Каждый компьютер ассоциативно связан с подмножеством датчиков (предпочтительно только одним) и, следовательно, связан, через граф "ячейки/датчики", с подмножеством областей в пределах контролируемой окружающей среды.
Компьютер участвует в задаче (например, задаче последовательности изображений для области или навигационной задаче), касающейся данной области, в том случае, если один из датчиков, управляемых этим компьютером, наблюдает, в по меньшей мере, одной из своих настроек, по меньшей мере, одну ячейку этой области.
Компьютер также принимает решение, должен ли один из его датчиков участвовать в задаче, в зависимости от приоритетов различных запрашиваемых задач. Например, если запрашивается последовательность изображений для области, а задействуемый в ней датчик уже используется для навигационной задачи, то компьютер может принять решение не участвовать в новой задаче, потому что навигация имеет более высокий приоритет, чем последовательность изображений для области.
После того, как было принято решение об участии в некоторой задаче, компьютеру нужно знать, какие другие датчики будут также участвовать в этой задаче, для того чтобы вычислить оптимальный охват.
Это стало возможным благодаря тому факту, что каждый компьютер отправляет всем другим компьютерам, по сети передачи данных, порцию информации, указывающую задачи, в которых участвуют его датчики.
Каждый компьютер, таким образом, знает полный набор датчиков, участвующих в задаче, и может, следовательно, вычислять конфигурацию управляемых датчиков для того, чтобы получить оптимальный охват.
Каждый компьютер имеет возможности для исполнения, по меньшей мере, одного алгоритма оптимального охвата для всей этой окружающей среды.
Однако количество задач, в которых одновременно задействуется компьютер, уменьшается при уменьшении количества датчиков с ним связанных; из этого следует, что вычислительную мощность каждого отдельного компьютера, принадлежащего распределенной системе, можно уменьшить по сравнению с вычислительной мощностью, требующейся централизованной системе управления.
Оптимальное решение, следовательно, состояло бы в том, чтобы использовать один компьютер на датчик или, что еще лучше, встроить компьютеры в датчики, таким образом, сделав последние интеллектуальными.
Другие варианты системы наблюдения
Преимущества этой системы видеонаблюдения очевидны из вышеупомянутого описания, при этом также ясно, что в нее могут быть внесены многие изменения, например, путем концентрирования или распределения ресурсов системы управления или путем использования эквивалентных процедур для управления той же самой информацией, требующейся и обрабатываемой в вышеописанных способах наблюдения.
Например, граф "ячейки/датчики", строящийся в конце стадии настройки, была предложен, потому что он позволяет оператору очень легко понять связи "ячейки/датчики". Однако, в целях строго численной обработки граф "ячейки/датчики" может быть заменен таблицей "ячейки/датчики", содержащей ту же самую информацию о связях между ячейками и датчиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КООРДИНАЦИИ МНОЖЕСТВА ДАТЧИКОВ | 2008 |
|
RU2510147C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ КОНФИГУРАЦИИ СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2561925C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| КОНТРОЛИРУЮЩАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ТЕПЛОВОЙ ОБРАБОТКИ | 2013 |
|
RU2653733C2 |
| СПОСОБ КОНТРОЛЯ ИЗМЕНЕНИЙ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ КОНСТРУКЦИЙ ЗДАНИЙ И СООРУЖЕНИЙ В СИСТЕМЕ МОНИТОРИНГА С НЕСОВЕРШЕННОЙ СЕНСОРНОЙ СЕТЬЮ | 2013 |
|
RU2541709C2 |
| Интеллектуальная система выявления и прогнозирования событий на основе нейронных сетей | 2021 |
|
RU2797748C2 |
| СИСТЕМА И СПОСОБ ОБЪЕДИНЕНИЯ НЕСКОЛЬКИХ ВИДЕОИЗОБРАЖЕНИЙ В ОДНО ПАНОРАМНОЕ ВИДЕОИЗОБРАЖЕНИЕ | 2019 |
|
RU2706576C1 |
| СЧЕТЧИК ПОДСЧЕТА ПАССАЖИРОВ | 2022 |
|
RU2789708C1 |
| Территориальная система экстренной кардиологической помощи | 2017 |
|
RU2673108C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЗИРОВАННОГО ВИДЕОНАБЛЮДЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ И СИТУАЦИЙ | 2003 |
|
RU2268497C2 |
Изобретение относится к способу для контроля окружающей среды посредством множества датчиков, в котором система управления принимает информацию от одного или более датчиков из упомянутого множества и использует упомянутую информацию для того, чтобы контролировать упомянутую окружающую среду. Техническим результатом является повышение надежности систем наблюдения, в частности систем видеонаблюдения, обеспечивая динамическую адаптацию системы всякий раз, когда датчик не может быть использован системой. Указанный технический результат достигается тем, что способ содержит стадию настройки, на которой оператор создает модель окружающей среды, определяя множество ячеек, соответствующих областям упомянутой окружающей среды, и затем создает связи "ячейки/датчики", определяя для каждого датчика, по меньшей мере, одно возможное положение, которое ассоциативно связано с, по меньшей мере, одной ячейкой. Для каждого положения оператор присваивает датчику оценку контроля для ассоциативно связанной с ним ячейки. Способ также содержит рабочую стадию, на которой система управления, для того, чтобы выполнять функцию наблюдения, находит те датчики, которые могут быть использованы для выполнения запрашиваемой функции наблюдения и управляет ими, основываясь на оценках контроля и связях "ячейки/датчики". 18 з.п. ф-лы, 6 ил.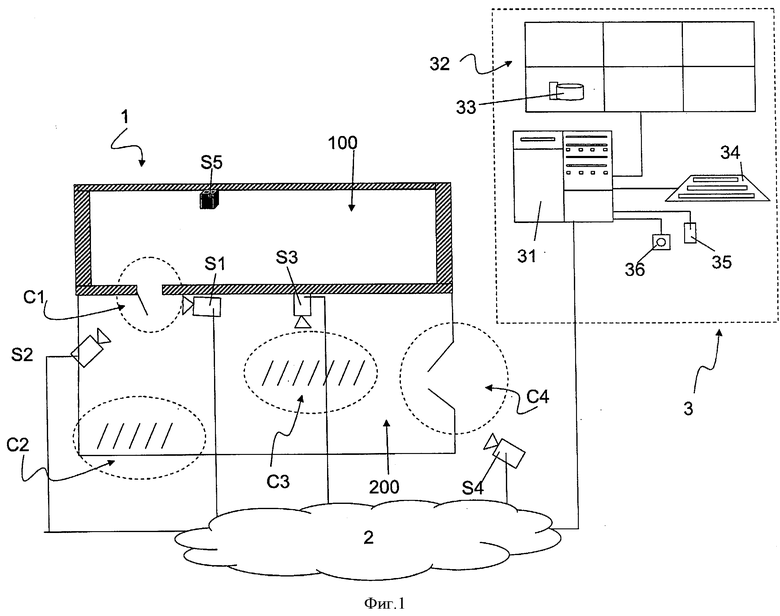
1. Способ для контроля окружающей среды (1) посредством множества датчиков (S 1 - S 5) видеонаблюдения или обнаружения движения, в котором система (31) управления принимает информацию от одного или более датчиков упомянутого множества и использует упомянутую информацию для того, чтобы контролировать упомянутую окружающую среду (1), при этом способ содержит стадию настройки, на которой оператор настраивает систему управления, и стадию работы, на которой система (31) управления управляет множеством датчиков (S1-S5) видеонаблюдения или обнаружения движения для контроля окружающей среды, в котором, во время стадии настройки, система (31) управления принимает входные данные от оператора для создания модели окружающей среды, и входные данные содержат:
текстовые и графические обозначения множества ячеек, соответствующих областям окружающей среды, подлежащей контролю,
связи "ячейка/датчик" между упомянутым множеством ячеек и упомянутым множеством датчиков, причем для каждого датчика упомянутого множества связей "ячейка/датчик" содержится информация для связи, по меньшей мере, одного возможного положения (xi) каждого датчика с, по меньшей мере, одной ячейкой упомянутого множества, и
множество оценок контроля, присвоенных оператором упомянутому по меньшей мере одному возможному положению (xi) каждого сенсора, при этом оценка контроля упомянутого множества соответствует оценке вероятности обнаружения датчиком в, по меньшей мере, одной позиции, возникновения события, происходящего в связанной с ним ячейке, и в котором на рабочей стадии для того, чтобы выполнять функцию наблюдения за подлежащей контролю областью, упомянутая система управления использует вышеупомянутые входные данные для:
находит, из числа упомянутого множества, пригодные для использования датчики, которые могут использоваться для выполнения упомянутой функции наблюдения, и
управляет, по меньшей мере, одним из упомянутых используемых датчиков, помещая его в возможное положение (xi), выбранное на основе упомянутых связей "ячейка/датчик" и на основе оценок контроля, ассоциативно связанных с этими возможными положениями (xi) упомянутого множества датчиков.
2. Способ по п.1, в котором упомянутые входные данные, предоставляемые оператором на стадии настройки, содержат смежности между упомянутыми ячейками.
3. Способ по п.1, в котором упомянутое выбранное возможное положение (xi) максимизирует вероятность обнаружения события в упомянутой области, подлежащей контролю.
4. Способ по п.1, в котором упомянутая система управления управляет совокупностью датчиков из упомянутого множества используемых датчиков, располагая их в соответствующих возможных положениях (xi) согласно конфигурации, выбранной из числа различных возможных комбинаций возможных положений (xi) упомянутой совокупности датчиков.
5. Способ по п.1, в котором упомянутое множество датчиков содержит, по меньшей мере, одну видеокамеру, и в котором оценка контроля, присвоенная, по меньшей мере, одному положению упомянутой видеокамеры, соответствует оценке обзора ассоциативно связанной с ним ячейки.
6. Способ по п.5, в котором упомянутые входные данные, предоставляемые оператором на стадии настройки, содержат смежности между упомянутыми ячейками.
7. Способ по п.6, в котором упомянутое выбранное возможное положение (xi) максимизирует вероятность обнаружения события в упомянутой области, подлежащей контролю.
8. Способ по п.7, в котором упомянутая система управления управляет совокупностью датчиков из упомянутого множества используемых датчиков, располагая их в соответствующих возможных положениях (xi) согласно конфигурации, выбранной из числа различных возможных комбинаций возможных положений (xi) упомянутой совокупности датчиков.
9. Способ по п.8, в котором упомянутая конфигурация максимизирует вероятность обнаружения события в упомянутой области, подлежащей контролю.
10. Способ по п.9, в котором упомянутая область, подлежащая контролю, ассоциативно связана с первым набором ячеек упомянутого множества, и в котором упомянутая конфигурация датчиков охватывает подмножество ячеек, подлежащих контролю, причем способ содержит этапы, на которых:
a. определяют упомянутую конфигурацию датчиков,
b. сохраняют упомянутые используемые датчики в упомянутой конфигурации в течение предварительно заданного времени,
c. определяют второе подмножество ячеек, не охватываемых упомянутой первой конфигурацией,
d. определяют вторую конфигурацию датчиков, которая максимизирует вероятность обнаружения события в упомянутом втором подмножестве.
11. Способ по п.9, в котором упомянутая вероятность ограничена использованием самого низкого количества датчиков, требующихся для выполнения упомянутой функции контроля.
12. Способ по п.11, в котором упомянутая область, подлежащая контролю, ассоциативно связана с первым набором ячеек упомянутого множества, и в котором упомянутая конфигурация датчиков охватывает подмножество ячеек, подлежащих контролю, причем способ содержит этапы, на которых:
a. определяют упомянутую конфигурацию датчиков,
b. сохраняют упомянутые используемые датчики в упомянутой конфигурации в течение предварительно заданного времени,
c. определяют второе подмножество ячеек, не охватываемых упомянутой первой конфигурацией,
d. определяют вторую конфигурацию датчиков, которая максимизирует вероятность обнаружения события в упомянутом втором подмножестве.
13. Способ по п.12, в котором, если упомянутая вторая конфигурация не охватывает все ячейки упомянутого второго подмножества, то шаги от c) до d) выполняются вновь до тех пор, пока упомянутое второе подмножество ячеек не будет пустым.
14. Способ по п.13, в котором во время каждого вычисления упомянутой второй конфигурации система управления находит из числа упомянутого множества те датчики, которые могут быть использованы для выполнения упомянутой функции наблюдения над упомянутым вторым набором ячеек.
15. Способ по п.12, в котором датчики из упомянутого множества, которые не используются для выполнения упомянутой функции наблюдения, используются для выполнения второй функции наблюдения над второй областью, подлежащей контролю.
16. Способ по любому из пп.1, 2, 5 или 6, в котором для выполнения упомянутой функции наблюдения упомянутая система управления выбирает возможное положение (xi), с которым ассоциативно связана самая высокая оценка контроля для области, подлежащей контролю, и управляет соответствующим датчиком, располагая его в упомянутом возможном положении (xi) с самой высокой оценкой контроля.
17. Способ по любому из пп.1, 2, 3, 5, 6 или 7, в котором упомянутая система управления использует способы исследования операций для определения датчиков, подлежащих управлению для выполнения упомянутой функции наблюдения, и положений датчиков, подлежащих управлению, в котором упомянутые способы наблюдения минимизируют функцию стоимости, которая зависит от упомянутых оценок контроля.
18. Способ по любому из пп.1-15, в котором упомянутый оператор определяет упомянутые ячейки, выбирая совокупность пикселей на электронной карте упомянутой окружающей среды, в котором частично перекрывающиеся совокупности пикселей группируются в одну ячейку.
19. Способ по любому из пп.1-15, в котором датчики содержат видеокамеры и в котором во время стадии настройки видеокамеры активируют последовательно; для каждой активированной видеокамеры изображение от видеокамеры отображают на экране (32) и оператор вводит взаимоотношение для ячейки/камеры и присваивает оценку контроля.
| ПНЕВМАТИЧЕСКИЙ ТОРМОЗ | 1937 |
|
SU56056A1 |
| US 4992866 A, 12.02.1991 | |||
| WO 9935850 A1, 15.07.1999 | |||
| WO 2006030444 А2, 23.03.2006 | |||
| US 2006004579 A1, 05.01.2006 | |||
| WO 03030550 A1, 10.04.2003 | |||
| СПОСОБ ЮСТИРОВКИ НАПРАВЛЕНИЯ ВИЗИРНОЙ ОСИ ДВУХКАМЕРНОЙ ТЕЛЕВИЗИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275750C2 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 1984 |
|
RU2140721C1 |
| ROWAIHY HOSAM et al | |||
| A survey of sensor selection schemes in wireless sensor networks | |||
| Unattended Ground, Sea, and Air Sensor | |||

