Предлагаемое изобретение относится к редуктору для привода в движение экструдера согласно ограничительной части п.1 формулы изобретения.
От преимуществ переработки материалов с помощью экструдеров со сдвоенными шнеками с находящимися в плотном зацеплении валами, как с экономической, так и с технологической точки зрения отказаться невозможно. В качестве важного критерия оценки потенциала производительности подобных машин можно использовать интенсивность крутящего момента, то есть отношение крутящего момента на каждом валу и поставленного в третью степень расстояния между осями. Дополнительно, производительность определяется частотой вращения.
Далее, фундаментальным для технологии является то, как происходит переход продукта на последующий вал шнека, так как в зависимости от того, приводятся в движение они в одинаковом или противоположных направлениях вращения, в клиновой пазухе между обрабатывающими элементами двух соседних валов формируются очень различные распирающие усилия, которые, со своей стороны, решающим образом определяют, прежде всего, износ и частоту вращения.
Из EP 0962298 известен редуктор для экструдера большой мощности со сдвоенными шнеками, который после установки реверсивных зубчатых колес относительно просто можно использовать для вращающихся в одинаковом или противоположных направлениях валов шнеков. Показательными для уровня техники для экструдера с вращающимися в противоположных направлениях шнеками являются WO 2007/093228 A1 и EP 995580 B1. В DE 3328782 C1 описывается редуктор с вращающимися в одинаковом направлении сдвоенными шнеками экструдера, в котором приводной вал расположен коаксиально внутри полого вала, и оба вала действуют в качестве торсионных валов, которые одним своим концом соединены с редуктором, при этом на полом валу расположены две аксиально смещенные ведущие шестерни. Описанный в DE 2628387, а также в PCT/JP 93/01039 редуктор применим только для вращающихся в одинаковом направлении валов шнеков.
В любом случае выходные валы редуктора должны подавать на валы шнеков максимально возможный крутящий момент. При этом при заданном расстоянии между осями выбирать отношение наружного диаметра шнека (Da) к внутреннему диаметру шнека (Di) в технологической части следует таким большим, насколько это возможно, и диаметр выходных валов при максимально возможном напряжении кручения таким малым, насколько это требуется.
Для привода в движение находящихся в зацеплении, прежде всего в плотном зацеплении, валов шнека дополнительно требуется одинаковое геометрическое угловое положение выходных валов при соответственно всех условиях нагрузки для того, чтобы аксиальный зазор валов шнека в коаксиально приводимой технологической части можно было выбрать минимально возможным без механического соприкосновения боковых поверхностей витков шнеков.
В отличие от экструдеров со сдвоенными шнеками, многовальные экструдеры с несколькими расположенными вдоль окружности с одинаковым центральным угловым удалением валами с параллельными осями имеют преимущество, так как они имеют вдвое больше клиновых пазух, в которых продукт при передаче от шнековых или прочих обрабатывающих элементов одного вала к другому обрабатывается особо эффективно.
Из DE 10315200 B4 уже известен редуктор для подобного многовального экструдера с вращающимися в одинаковом направлении валами согласно ограничительной части п.1 формулы изобретения. При этом предусмотрен центральный приводной вал, на котором предусмотрены обе находящиеся в зацеплении с аксиально смещенными выходными ведущими шестернями солнечные зубчатые колеса. Для повышения производительности ведущие шестерни дополнительно находятся в зацеплении с имеющими внутренние зубья полыми колесами, при этом полые колеса снабжены наружными зубчатыми венцами, в зацеплении с которыми находится ведущая шестерня на расположенном снаружи приводном валу, так что каждое полое колесо приводится с равным крутящим моментом и по половине крутящего момента каждой ведущей шестерни передается соответственно через солнечную зубчатую шестерню и через полое колесо.
Прежде всего, известные редукторы хорошо зарекомендовали себя при вращающихся в одинаковом направлении валах шнеков в стандартном случае. Но увеличенные частоты вращения и/или крутящие моменты при этом реализовать не удается, так как при этом они либо имеют слишком высокий износ, либо требуют слишком большого зазора в технологической части и поэтому работают неэффективно.
Задачей изобретения является разработка редуктора для многовального экструдера с находящимися в плотном зацеплении обрабатывающими элементами, который имеет высокий потенциал производительности.
Согласно изобретению это достигнуто посредством отображенного в п.1 формулы изобретения редуктора. Преимущественные формы выполнения изобретения отображены в зависимых пунктах.
Предлагаемый редуктор предназначен для привода в движение одно- или многодвигательного многовального экструдера с находящимися в плотном зацеплении, вращающимися в одинаковом или противоположных направлениях валами, которые для компенсации усилий в редукторе и при оптимальном расположении в замкнутой окружности также размещены в технологической части на делительной окружности.
В предлагаемом редукторе солнечное зубчатое колесо, в которое входят смещенные в направлении от технологической части выходные ведущие шестерни, без возможности поворота соединена с торсионным полым валом, в то время как солнечная зубчатая шестерня, в которую входят смещенные в сторону технологической части выходные ведущие шестерни, без возможности поворота соединена с внутренним торсионным валом, который расположен в торсионном полом валу коаксиально к последнему.
При этом торсионный полый вал и торсионный внутренний вал имеют такую конструкцию, что обусловленная различной длиной выходных валов разность углов торсионного скручивания компенсируется различным скручиванием торсионного полого вала относительно торсионного внутреннего вала. То есть, различные скручивания выходных валов компенсируются различным скручиванием торсионного полого вала относительно торсионного внутреннего вала. Разность скручивания выходных валов особо сильно выражена из-за того, что из-за своего небольшого зазора они должны быть выполнены тонкими.
Отличающееся скручивание торсионного полого вала относительно торсионного внутреннего вала можно задать, например, посредством площади тороидального сечения торсионного полого вала относительно площади круглого сечения преимущественно выполненного в виде полнотелого вала торсионного внутреннего вала.
Тем самым при максимальной производительности редуктора не только при частичной нагрузке, но и в режиме холостого хода и при полной нагрузке обеспечено синхронизированное угловое положение соседних валов и, тем самым, предотвращен износ даже находящихся в плотном зацеплении обрабатывающих элементов.
Надетые на валы технологической части обрабатывающие элементы могут быть шнеками или тому подобными подающими элементами, а также формовочными блоками, червячными элементами с противоположными направлениями подачи и тому подобным.
Предлагаемый редуктор подходит, как для вращающихся в одинаковом направлении валов в технологической части, так и для технологической части, в которой соседние валы вращаются в противоположных направлениях. Для этого при вращающихся в одинаковом направлении валах торсионный полый вал и торсионный внутренний вал имеют возможность привода в движение с одинаковой угловой скоростью в одинаковом направлении вращения, в то время как при вращающихся в противоположных направлениях торсионный полый вал и торсионный внутренний вал являются приводимыми в движение с одинаковой угловой скоростью в противоположных направлениях вращения.
При вращающихся в противоположных направлениях валах с большим количеством материала между обрабатывающими элементами развивается большее давление, чем при вращающихся в одинаковом направлении валах. Из-за этого при вращающихся в противоположном направлении валах при равной производительности оборудования между валами возникает существенно большее распирающее усилие, которое ведет к сильному износу. Вследствие этого экструдеры со сдвоенными шнеками с противоположным направлением вращения валов имеют в несколько раз меньшую производительность по сравнению с экструдерами со сдвоенными шнеками с одним направлением вращения валов. С другой стороны, экструдеры с противоположным направлением вращения необходимы для определенных, например высокодисперсных, технологических задач или для усиленных наночастицами пластиков.
В экструдере с несколькими расположенными вдоль окружности валами распирающие усилия между соседними валами в значительной степени взаимоуничтожаются. Тем самым многовальный экструдер с предлагаемым редуктором может эксплуатироваться также и с вращающимися в противоположных направлениях валами с высокой частотой вращения и, тем самым, производительностью оборудования.
Из-за своего небольшого зазора выходные валы редуктора многовального экструдера должны быть выполнены с соответствующим небольшим диаметром. Поэтому они чрезвычайно нагружаются. Поэтому высокий крутящий момент достижим лишь тогда, когда на выходные валы не воздействуют радиальные усилия. Поэтому предпочтительно, что как обращенные к технологической части выходные ведущие шестерни, так и обращенные от технологической части выходные ведущие шестерни находятся в зацеплении не только с солнечным зубчатым колесом, но и с коаксиальным к солнечному зубчатому колесу полым колесом с внутренними зубьями, при этом они приводятся в движение от полого колеса с внутренними зубьями таким же крутящим моментом, что и от солнечного зубчатого колеса. Тем самым радиальные усилия, которые воздействуют на выходные ведущие шестерни, взаимно уничтожаются.
Привод в движение солнечного зубчатого колеса и полого колеса с внутренними зубьями с одинаковой мощностью можно осуществить различными способами. Так, например, два отдельных двигателя с соответствующим электронным управлением могут с одинаковой мощностью приводить в движение солнечное зубчатое колесо и полое колесо с внутренними зубьями. Также, между солнечным зубчатым колесом и полым колесом с внутренними зубьями возможно предусмотреть механическую координацию для того, чтобы распределять по половине крутящего момента соответственно на солнечное зубчатое колесо и на полое колесо с внутренними зубьями. Таким образом, соответственно подводимую мощность или соответствующий крутящий момент изнутри и/или снаружи можно пропорционально (по частям) отводить на смещенные аксиально выходные ведущие шестерни.
Позиционирование нулевой точки производится в несколько этапов и вначале заключается непосредственно в валах с нарезными зубьями, а также в обоих смещенных, как от технологической части, так и к технологической части блоках шестерен, которые механически соединены через торсионный полый вал и торсионный внутренний вал, которые одновременно делят крутящий момент соответственно по половине и позиционированы на свободных концах.
При вращающихся в одинаковом направлении валах это может происходить через или посредством понижающей зубчатой передачи, а при вращающихся в противоположных направлениях валах - посредством двух зубчатых колес в качестве понижающей ступени, которые соединены с помощью реверсивной передачи и/или скоординировано приводятся в движение от одного или двух двигателей.
Если одновременно осуществляется привод валов с нарезными зубьями посредством полого колеса с внутренними зубьями и зубчатым венцом в качестве одновременной понижающей ступени, то при одномоторном приводе между двигателем и соответствующей понижающей ступенью предусмотрен торсионный вал, которые может соответственно разделять и передавать крутящий момент.
Далее изобретение в качестве примера поясняется подробнее со ссылкой на прилагаемый чертеж. Показано на:
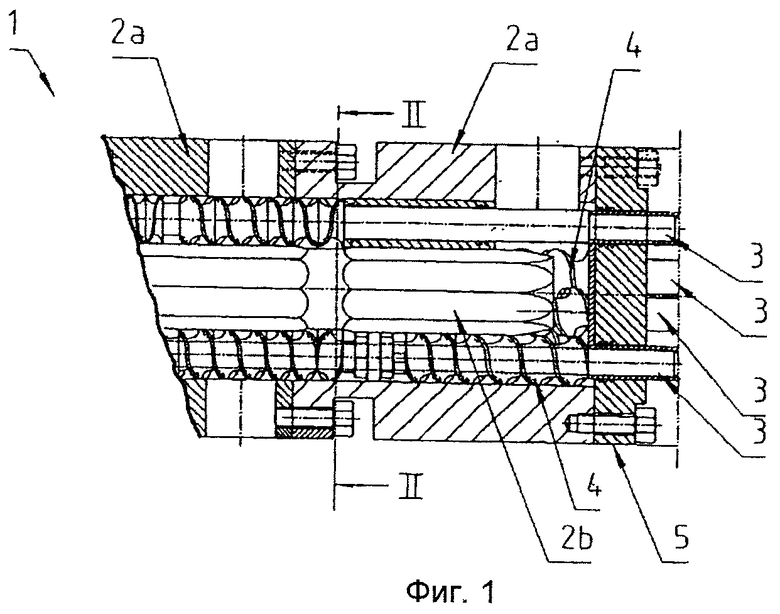
Фигура 1 - продольное сечение нагнетающего участка технологической части экструдера,
Фигура 2 - поперечное сечение вдоль линии II-II на фигуре 1,
Фигура 3 - продольное сечение первой формы конструктивного выполнения редуктора для вращающихся в противоположных направлениях валов с реверсивной передачей, а также для одного или нескольких двигателей,
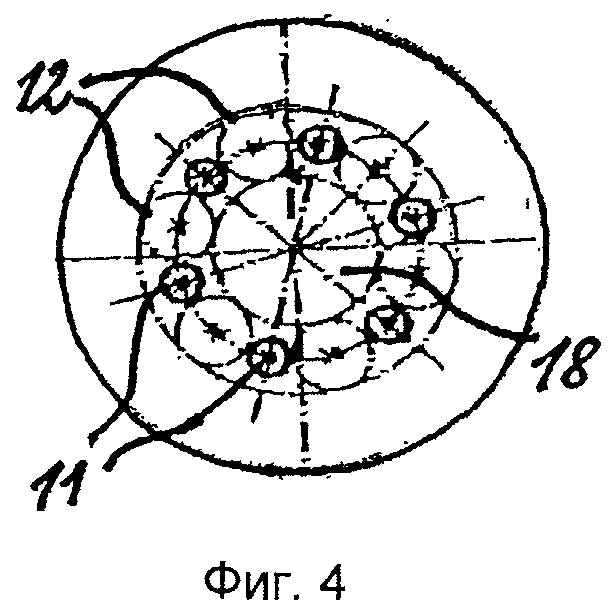
Фигура 4 - поперечное сечение вдоль линии IV-IV на фигуре 3,
Фигура 5 - увеличенное по сравнению с фигурой 2 изображение трех находящихся в зацеплении друг с другом подающих элементов на вращающихся в противоположных направлениях валах,
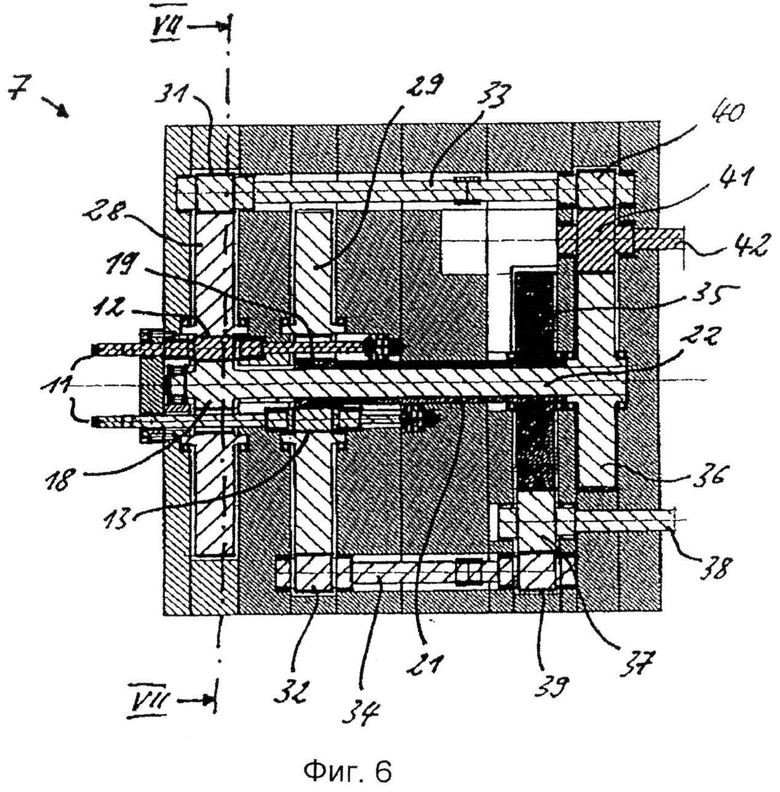
Фигура 6 - продольное сечение другой формы конструктивного выполнения редуктора для вращающихся в противоположных направлениях валов и двух вращающихся в противоположных направлениях приводных двигателей или посредством изменения направления вращения двигателя для вращающихся в одинаковом направлении валов,
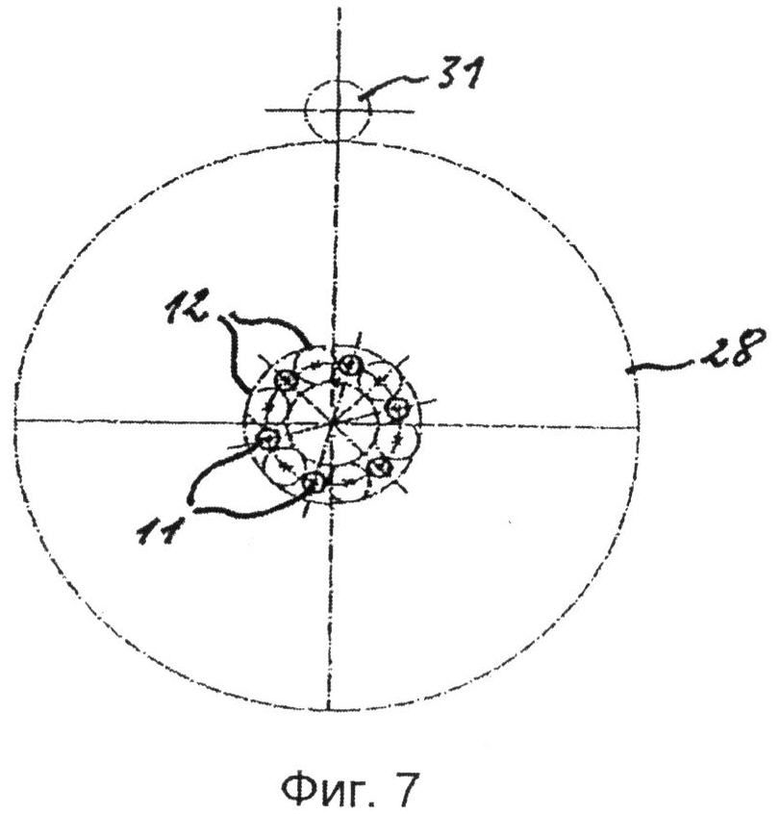
Фигура 7 - поперечное сечение вдоль линии VII-VII на фигуре 6,
Фигура 8 - продольное сечение первой формы конструктивного выполнения редуктора для вращающихся в одинаковом направлении валов и двух приводных двигателей через понижающий редуктор, и
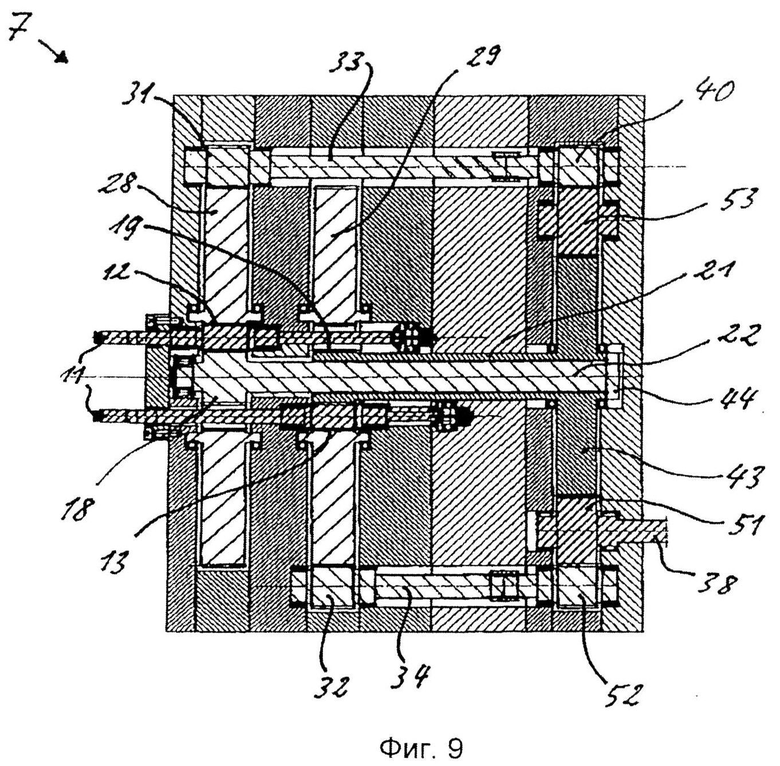
Фигура 9 - продольное сечение другой формы конструктивного выполнения редуктора для вращающихся в одинаковом направлении валов с одним приводным двигателем и одним понижающим редуктором.
Согласно фигуре 1 и 2 технологическая часть 1 экструдера в корпусе 2а с сердцевиной 2b имеет двенадцать расположенных вдоль окружности (фигура 2) с одинаковым центральным угловым удалением валов 3 с параллельными осями, которые оснащены обрабатывающими элементами 4, при этом обрабатывающие элементы 4 соседних валов 3 входят друг в друга.
Технологическая часть 1 на стороне подачи закрыта концевой пластиной 5. Сквозь концевую пластину 5 простираются валы 3, которые согласно фигурам 3 и 4, а также согласно фигурам 6-9 приводятся в движение раздаточным редуктором 7 в одинаковом направлении или в противоположных направлениях.
Редуктор 7 согласно фигуре 3 имеет пластину 9, которая соединена с концевой пластиной 5 технологической части 1. Из пластины 9 простираются двенадцать выходных валов 11, которые без возможности поворота соединены с двенадцатью валами 3 технологической части 1. Выходные валы 11 без возможности поворота соединены с выходными ведущими шестернями 12, 13. Из-за небольшого расстояния между осями выходных валов 11 выходные ведущие шестерни 12, 13 редуктора 1 соседствующих валов 11 расположены с аксиальным смещением. То есть, ведущие шестерни 12 расположены со смещением к технологической части 1, а ведущие шестерни 13 расположены со смещением от технологической части 1. В 14, 15, 16 и 17 выходные валы 11 опираются с возможностью вращения.
Ведущие шестерни 12 находятся в зацеплении с аксиально смещенным к технологической части 1 солнечным зубчатым колесом 18, а ведущие шестерни 13 - с аксиально смещенным от технологической части 1 солнечным зубчатым колесом 19. В то время как солнечное зубчатое колесо 19 без возможности поворота соединено с торсионным полым валом 21, солнечное зубчатое колесо 18 без возможности поворота соединено с выполненным в виде полнотелого вала торсионным внутренним валом 22, который расположен в полом валу 21 коаксиально к последнему.
Торсионный полый вал 21 и торсионный внутренний вал 22 на противолежащих технологической части 1 концах снабжены соответственно зубчатым колесом 23 или 24. Зубчатое колесо 23 находится в зацеплении с ведущей шестерней 25, которая без возможности вращения расположена на приводном вале 26 редуктора 7, который приводится в движение двигателем (не показан). Зубчатое колесо 23 приводит в движение зубчатое колесо 24, благодаря чему торсионный полый вал 21 и внутренний торсионный вал 22 приводятся в движение в противоположных направлениях, так что обращенное к технологической части 1 солнечное зубчатое колесо 18 и находящаяся с ним в зацеплении выходная ведущая шестерня 12, с одной стороны, и обращенное от технологической части 1 солнечное зубчатое колесо 19 и находящаяся с ним в зацеплении выходная ведущая шестерня 13, с другой стороны, вращаются в противоположных направлениях.
Между зубчатыми колесам 23 и 24 предусмотрена реверсивная передача, которая имеет зубчатое колесо 27, которое находится в зацеплении с зубчатым колесом 24 и вместе с зубчатым колесом 27' посажено на вал 27'', а также зубчатые колеса 30 30' на осепараллельном валу 30'', при этом зубчатые колеса 27' и 30 и зубчатые колеса 23 и 30' находятся в зацеплении друг с другом. К валу 27 может быть присоединен второй приводной двигатель.
Длина L2 выходных валов 11 между их обращенным к технологической части 1 концом и приводными шестернями 13 существенно больше, чем длина L1 выходных валов 11 между их обращенным к технологической части 1 концом и приводными шестернями 12. Так, соотношение L2:L1 может составлять, например, примерно от 1,5 до 2,5.
Это приводит к разному углу скручивания на обращенном к технологической части 1 конце выходных валов 11 с ведущими шестернями 12 по отношению к выходным валам 11 с ведущими шестернями 13. Благодаря этому предотвращается синхронизированное угловое положение обрабатывающих элементов 4 на соседних валах 3 технологической части 1 экструдера, если они приводятся в движение посредством редуктора 7, прежде всего, при воздействии высоких крутящих или скручивающих моментов на выходные валы 11.
Поэтому согласно изобретению торсионный полый вал 21 и торсионный внутренний вал 22 выполнены таким образом, что торсионный внутренний вал 22 подвергается большему скручиванию между солнечным зубчатым колесом 18 и зубчатым колесом 24, чем торсионный внутренний вал 21 между солнечным зубчатым колесом 19 и зубчатым колесом 23, и именно в такой степени, что большее скручивание выходных валов 11 с ведущими шестернями 12 по сравнению со скручиванием выходных валов 11 с приводными шестернями 12 компенсируется, то есть обусловленный различной длиной L1 или L2 выходных валов 11 разный угол торсионного скручивания компенсируется иным скручиванием торсионного полого вала 21 по сравнению с торсионным внутренним валом 22.
Тем самым предлагаемый многовальный экструдер обеспечивает очень высокую мощность, прежде всего при противоходе. Так как в отличие от экструдера со сдвоенными шнеками на валы многовального экструдера, благодаря обоюдной компенсации сил между обрабатывающими элементами, действуют значительно меньшие разжимные усилия, как это видно на фигуре 5.
При этом на фигуре 5 стрелками Р1, Р2 или РЗ показано направление вращения противоходных валов 3-1, 3-2 и 3-3 в технологической части 1 экструдера, вследствие чего между обрабатывающими элементами 4-1, 4-2 и 4-3 возникает показанное стрелками М1 и М2 поступление материала. Как видно, тем самым усилие, с которым поступление материала М1 воздействует сбоку на валы 3-1 и 3-2, то есть сила, которая пытается отжать валы 3-1 и 3-2 друг от друга, на валу 3-2 в существенной степени взаимно уничтожается силой, с которой поступление материала М2 между валами 3-2 и 3-3 воздействует на вал 3-2. То, что показано на примере вала 3-2 на фигуре 5, действует и в отношении всех остальных валов 3 многовального экструдера. Тем самым, предлагаемый экструдер имеет очень высокую производительность выработки, в том числе и при противоходе.
В одном примере конструктивного выполнения согласно фигурам 6 и 7 торсионный полый вал 21 и торсионный внутренний вал 22 и, тем самым, выходные валы 11 с выходными ведущими шестернями 13 или выходные валы 11 с выходными ведущими шестернями 12 также приводятся в движение в противоположных направлениях вращения.
При этом выходные ведущие шестерни 12 и 13, помимо зацепления с солнечным зубчатым колесом 18 или же 19, находятся в зацеплении с соответственно полым колесом 28 или же 29 с внутренними зубьями. Тем самым приводные шестерни 12, 13 приводятся в движение, как от солнечных зубчатых колес 18, 19, так и от расположенного радиально противолежащего охватывающего полого колеса 28 или 29 с внутренними зубьями, при этом для этого полые колес 28 или же 29 со своей стороны расположены с соответствующим аксиальным смещением.
Каждое полое колесо 28, 29 снабжено наружным зубчатым венцом, в зацеплении с которым находится приводное зубчатое колесо 31, 32 с наружным зубчатым венцом на расположенных снаружи приводных валах 33 или же 34. При этом может быть предусмотрено соответственно больше, например четыре, расположенных со смещением по периметру полых колес 28, 29, расположенных снаружи приводных валов 33, 34. Торсионный полый вал 21 для приведения в движение снабжен зубчатым колесом 35, а торсионный внутренний вал 22 - зубчатым колесом 36.
Зубчатое колесо 35 находится в зацеплении с ведущей шестерней 37, которая без возможности вращения сидит на первом приводном валу 38, который приводится в движение первым (не показанным) двигателем. Ведущая шестерня 37 одновременно находится в зацеплении с зубчатым колесом 39, которое без возможности вращения расположено на расположенном снаружи приводном валу 34 для того, чтобы посредством приводного зубчатого колеса 32 приводить в движение полое колесо 29.
В противоположность этому, зубчатое колесо 36 находится в зацеплении с ведущей шестерней 41, зубчатое колесо 36 - в зацеплении с ведущей шестерней 41, которая без возможности вращения сидит на втором приводном валу 42, который приводится вторым в движение вторым двигателем (не показанным). Ведущая шестерня 41 одновременно находится в зацеплении с зубчатым колесом 40, которое без возможности вращения расположено на расположенном снаружи приводном валу 33 для того, чтобы посредством приводного зубчатого колеса 31 приводить в движение полое колесо 28.
Посредством редуктора согласно фигуре 6 и 7 торсионный полый вал 21 и торсионный внутренний вал 22 вместо противоположного направления вращения могут приводиться в одинаковом направлении вращения. Для этого приводные валы 38 и 42 вместо одинакового направления вращения нужно лишь перевести на противоположное направление вращения.
В противоположность этому, в примере конструктивного выполнения согласно фигуре 8 торсионный полый вал 21 и торсионный внутренний вал 22 выполнены с возможностью привода в движение только с одинаковым направлением вращения.
При этом торсионный полый вал 21 на противолежащем технологической части 1 конце соединен с зубчатым колесом 43 без возможности вращения. Далее, на противолежащем технологической части 1 конце между полым торсионным валом 21 и торсионным внутренним валом 22 предусмотрено жесткое соединение без возможности вращения. Для этого на конце торсионного внутреннего вала 22 предусмотрен фланец 44, который скрепляется с соединенным без возможности вращения с полым торсионным валом 21 зубчатым колесом 43 посредством резьбовых шпилек 45.
Зубчатое колесо 43 находится в зацеплении с ведущей шестерней 46, 47, которые сидят на приводных валах 48, 49, которые приводятся в движение от одного или двух (не показанных) двигателей.
Одна форма конструктивного выполнения согласно фигуре 9 также предназначена для однонаправленного режима, то есть редуктор, в котором торсионный полый вал 21 и торсионный внутренний вал 22 приводятся в движение в одинаковом направлении вращения.
Как и в форме конструктивного выполнения согласно фигуре 8, торсионный полый вал 21 при этом соединен без возможности вращения на противолежащем технологической части 1 конце с зубчатым колесом 43, при этом для соединения торсионного полого вала 21 с торсионным внутренним валом 22 на конце торсионного внутреннего вала 22 вновь предусмотрен фланец 44, который закреплен на соединенном с полым торсионным валом 22 без возможности вращения зубчатым колесом 43 без возможности вращения.
Для взаимного уничтожения радиальных сил, которые воздействуют на выходные ведущие шестерни 12, 13, в одной форме конструктивного выполнения согласно фигуре 9 в соответствии с формой конструктивного выполнения согласно фигуре 6 предусмотрены полые колеса 28, 29 с внутренними зубьями, в зацеплении с которыми дополнительно находятся ведущие шестерни 12 или же 13, а также приводные зубчатые колеса 31, 32 на расположенных снаружи приводных валах 33, 34, которые входят в зацепление с наружным зубчатым венцом полых колес 28, 29.
В отличие от формы конструктивного выполнения согласно фигуре 6 предусмотрен лишь один приводной вал 38, который приводится в движение одним (не показанным) двигателем.
Для этого ведущая шестерня 51, которая сидит на одном приводном валу 38, с одной стороны, находится в зацеплении с зубчатым колесом 43 и, с другой стороны, с зубчатым колесом 52 на расположенном снаружи приводном валу 34, посредством которого приводится в движение полое колесо 29 с внутренними зубьями, в зацеплении с которым находятся выходные ведущие шестерни 13.
Одновременно зубчатое колесо 43 находится в зацеплении с реверсивным зубчатым колесом 53, которое находится в зацеплении с ведущей шестерней 40 на расположенном снаружи приводном валу 33, посредством которого приводится в движение полое колесо 28 с внутренними зубьями, в зацеплении с которым находятся выходные ведущие шестерни 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВАЛЬНЫЙ ЭКСТРУДЕР | 2007 |
|
RU2441754C2 |
| ЭКСТРУДЕР | 2005 |
|
RU2378115C2 |
| МНОГОВАЛЬНЫЙ ЭКСТРУДЕР С САМООЧИЩАЮЩИМИСЯ ПОДАЮЩИМИ ВАЛАМИ | 2013 |
|
RU2618565C2 |
| ЭКСТРУДЕР С НЕСКОЛЬКИМИ ВАЛАМИ | 2006 |
|
RU2382701C1 |
| ЭКСТРУДЕР | 2011 |
|
RU2568726C2 |
| ЭКСТРУДЕР | 2005 |
|
RU2350468C2 |
| РЕДУКТОР | 1990 |
|
RU2018743C1 |
| ЭКСТРУДЕР | 2009 |
|
RU2538852C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОГО КОМБАЙНА ДЛЯ ВЫЕМКИ УГЛЯ В ПЛАСТАХ С ТВЕРДЫМИ ПОРОДНЫМИ ВКЛЮЧЕНИЯМИ | 2010 |
|
RU2442893C2 |
| РЕДУКТОР, СООСНЫЙ С МНОГОПОТОЧНОЙ ПЕРЕДАЧЕЙ | 1990 |
|
RU2039903C1 |




Изобретение относится к редуктору для привода в движение экструдера. Редуктор имеет технологическую часть с несколькими расположенными вдоль окружности осепараллельными валами и выходные валы, которые коаксиально, без возможности вращения, соединены с валами технологической части. Каждый выходной вал имеет выходную ведущую шестерню. Соседние выходные валы посредством аксиального смещения их выходных ведущих шестерен имеют различную длину между их обращенным к технологической части концом и выходной ведущей шестерней. Выходные ведущие шестерни находятся в зацеплении с солнечным зубчатым колесом, а каждое солнечное зубчатое колесо соединено с приводным валом. Приводной вал со смещенным от технологической части солнечным зубчатым колесом образован торсионным полым валом, а приводной вал со смещенным к технологической части солнечным зубчатым колесом образован расположенным в торсионном полом валу коаксиальным торсионным внутренним валом. Торсионный полый вал и торсионный внутренний вал выполнены таким образом, что обусловленная различной длиной приводных валов разность углов торсионного скручивания торсионного полого вала и торсионного внутреннего вала компенсируется. Редуктор имеет высокий потенциал производительности. 10 з.п. ф-лы, 9 ил.
1. Редуктор для привода в движение экструдера, который имеет технологическую часть (1) с несколькими расположенными вдоль окружности с одинаковым центральным угловым удалением осепараллельными валами (3), которые без возможности вращения соединены с обрабатывающими элементами (4), посредством которых соседние валы (3) входят друг в друга,
при этом редуктор (7) имеет выходные валы (11), которые коаксиально без возможности вращения соединены с валами (3) технологической части (1), каждый выходной вал (11) имеет выходную ведущую шестерню (12, 13), соседние выходные валы (11) посредством аксиального смещения их выходных ведущих шестерен (12, 13) имеют различную длину (L1, L2) между их обращенным к технологической части (1) концом и выходной ведущей шестерней (12, 13), смещенные к технологической части (1) или от нее выходные ведущие шестерни (12, 13) находятся в зацеплении с соответственно одним солнечным зубчатым колесом (18, 19), и каждое солнечное зубчатое колесо (18, 19) соединено с приводным валом,
отличающийся тем, что
приводной вал со смещенным от технологической части (1) солнечным зубчатым колесом (19) образован торсионным полым валом (21), а приводной вал со смещенным к технологической части (1) солнечным зубчатым колесом (18) образован расположенным в торсионном полом валу (21) коаксиальным торсионным внутренним валом, при этом торсионный полый вал (21) и торсионный внутренний вал (22) выполнены таким образом, что обусловленная различной длиной (L1, L2) приводных валов (11) разность углов торсионного скручивания торсионного полого вала (21) и торсионного внутреннего вала (22) компенсируется.
2. Редуктор по п.1, отличающийся тем, что торсионный полый вал (21) и торсионный внутренний вал (22) выполнены с возможностью привода в движение с одинаковой угловой скоростью в одинаковом или противоположных направлениях вращения.
3. Редуктор по п.2, отличающийся тем, что выполненные с возможностью привода в движение в одинаковом направлении вращения торсионный полый вал (21) и торсионный внутренний вал (22) на их обращенном от технологической части (1) конце снабжены общим зубчатым колесом (43) или соответственно одним зубчатым колесом (35, 36).
4. Редуктор по п.3, отличающийся тем, что снабженные общим зубчатым колесом (43) торсионный полый вал (21) и торсионный внутренний вал (22) на обращенном от технологической части (1) конце соединены друг с другом без возможности вращения.
5. Редуктор по п.4, отличающийся тем, что общее зубчатое колесо (43) соединено с торсионным полым валом (21) без возможности вращения, а торсионный внутренний вал (22) имеет фланец (44), который соединен с зубчатым колесом (43) без возможности вращения.
6. Редуктор по п.2, отличающийся тем, что выполненные с возможностью привода в движение в противоположных направлениях вращения торсионный полый вал (21) и торсионный внутренний вал (22) снабжены соответственно одним зубчатым колесом (23, 24; 35, 36).
7. Редуктор по одному из предшествующих пунктов, отличающийся тем, что обращенные к технологической части (1) выходные ведущие шестерни (12) и обращенные от технологической части (1) выходные ведущие шестерни (13) находятся в зацеплении как с солнечным зубчатым колесом (18), так и с коаксиальным полым колесом (28, 29) с внутренними зубьями.
8. Редуктор по п.7, отличающийся тем, что крутящий момент на обращенные к технологической части (1) и на обращенные от технологической части (1) выходные ведущие шестерни (12, 13) передается пропорционально отводимым от солнечного зубчатого колеса (18, 19) или солнечного зубчатого колеса (18, 19) и полого колеса (28, 29) с внутренними зубьями.
9. Редуктор по п.1, отличающийся тем, что позиционирование нулевой точки на соединенном с валами (11) технологической части (1) конце приводных валов (11) является координируемым геометрическим или силовым замыканием механически и/или электрически.
10. Редуктор по п.2 и 8, отличающийся тем, что для выполненных с возможностью привода в движение в одинаковом направлении вращения выходных валов (11) механический отвод крутящего момента является координируемым электрическим валом.
11. Редуктор по п.1, отличающийся тем, что обращенная к технологической части (1) выходная ведущая шестерня (12) и обращенная от технологической части (1) выходная приводная шестерня (13) приводятся в движение соответственно одним двигателем.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления яблочного шипучего вина | 1981 |
|
SU962298A1 |
| Коробка передач для машин с близким расположением ведомых валов | 1977 |
|
SU793417A3 |
| РАСПРЕДЕЛИТЕЛЬНАЯ КОРОБКА ДВУХШНЕКОВОГО ЭКСТРУДЕРА, ПРИВОД ДВУХШНЕКОВОГО ЭКСТРУДЕРА И ДВУХШНЕКОВЫЙ ЭКСТРУДЕР | 2004 |
|
RU2286493C2 |

