Способ предназначен для определения положения центра масс статически неопределимого многоопорного объекта, установленного на маятниковом подвесе с упругими связями, имеющими нелинейно-упругие характеристики, преимущественно с амортизаторами пневмогидравлического типа с двухштоковой компоновочной схемой. Он применим для объектов энергетического, тяжелого, транспортного машиностроения, например, крупногабаритных энергоблоков атомных электростанций.
Известен аналог - способ определения центра масс автомобиля (Автор: Пресняков В.А. «Лабораторный практикум в программе курса «Конструкция, расчет и потребительские свойства автомобилей». Владивостокский государственный университет экономики и сервиса), источник расположен в интернет-ресурсе по адресу:
http://abc.vvsu.ru/Books/svovstvaauto/page0003.asp).
В аналоге положение центра масс двухосного автомобиля в трехмерной системе координат определяется экспериментально при помощи тали и крановых весов в процедуре многократного взвешивания. При этом взвешивание проводится сначала для горизонтального расположения автомобиля. Затем его последовательно с помощью тали поднимают в продольном и боковом направлениях, получая углы наклона по этим направлениям не менее 10÷15 градусов. Для каждого из этих положений повторяют операцию взвешивания, определяя изменения нагрузок, приходящихся на весы и таль. Расположение центра масс определяется аналитически, путем расчета по правилам механики, используя уравнения моментов относительно одной из точек опоры или подвеса.
В качестве способа-прототипа принят способ определения положения центра масс самолета, также основанный на процедуре многократного взвешивания. Значение равнодействующей силы веса всех частей самолета определяют по сумме весов его составных частей, расходуемых материалов (ГСМ), полезной нагрузки. Вектор равнодействующей силы тяжести проходит через некоторую воображаемую точку самолета, называемую центром тяжести. Указанный способ приведен в методическом материале «Аэродинамика самолета» и представлен на нескольких интернет-источниках, например: ; http://aviaclub.ru/uploads/media/Aehrodinamika_samoljota.pdf
При определении положения центра тяжести самолет устанавливается на весы в двух положениях, как показано на фиг.1. При каждом взвешивании замеряют показания передних и задних весов. Зная расстояние между весами и показания передних и задних весов в обоих случаях, по правилам механики определяют для каждого из этих положений самолета величину равнодействующей силы и линию ее действия. Точка пересечения равнодействующих линий 1-1 и 2-2 определяет центр тяжести самолета.
Приведенные аналог и прототип способа определения положения центра масс объектов в случае их использования для многоопорных, статически неопределимых упругих металлоконструкций обладают следующими недостатками:
- и аналог, и прототип предполагают использование дополнительных измерительных средств (весов, динамометров), опирающихся на основание, что невозможно для рассматриваемого класса объектов, при расположении в помещениях с недостаточной несущей способностью основания;
- недостаточные диапазоны и точности известных средств измерения, применяемых в прототипе, при малых углах наклона рассматриваемого класса объектов (диапазон допустимых угловых отклонений от занимаемого пространственного положения не превышает 3÷5 градусов);
- известные способы могут использоваться только вне режима штатной эксплуатации объектов.
Целью изобретения является создание способа определения положения центра масс для крупногабаритных объемных металлоконструкций, с необходимой точностью, для которых не существует средств прямого взвешивания. Они имеют протяженную форму, горизонтально ориентированны в пространстве, обладают неоднородным распределением жесткостных характеристик по длине, находятся в режиме эксплуатации в условиях ограниченного свободного окружающего пространства. Задача решается совокупностью расчетно-экспериментальных работ.
Предлагаемый способ основан на многократном взвешивании объекта в различных пространственных положениях (в горизонтальном и в отклоненных состояниях) и отличается тем, что объект наклоняют по крену, создавая вдоль одной стороны с помощью гидродомкратов подъемные силы по меньшей мере в каждом амортизационном узле, подъем производят синхронно, величину подъемной силы наращивают монотонно-ступенчато, в процессе подъема регистрируют величину подъемной силы в каждом гидродомкрате. Наращивание подъемных сил ведут до того момента, когда сумма подъемных сил, по сравнению с суммой на предыдущем шаге, начнет уменьшаться на величину не менее 5%, при этом подъем стороны объекта ведут, предварительно расфиксировав следящие штоки амортизаторов на данной стороне объекта (Режим с фиксацией штоков является технологическим. В рабочем состоянии СА - штатном режиме эксплуатации - штоки расфиксированы).
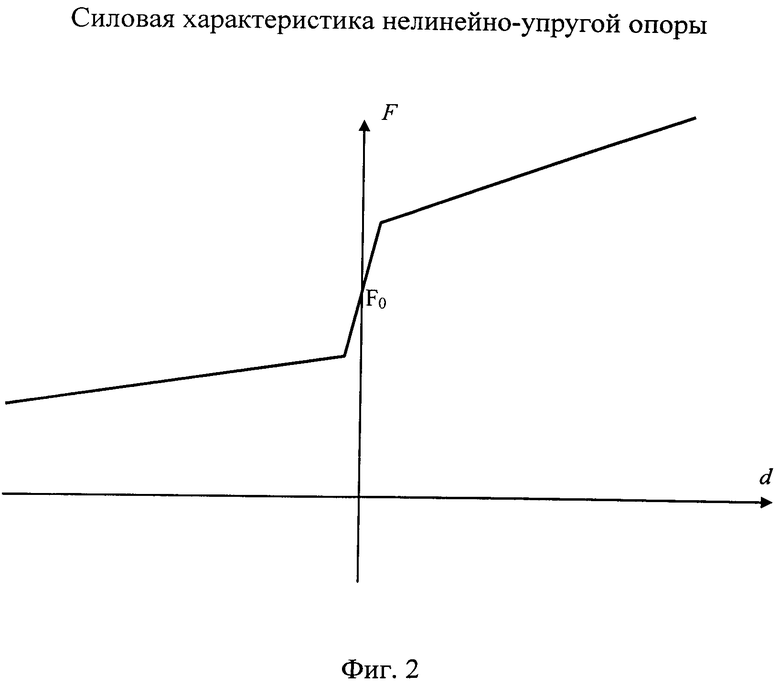
При отсутствии средств прямого взвешивания для определения реакций в опорах используются их нелинейные силовые характеристики. Зная силовые характеристики опор, принимая начальное пространственное положение объекта за горизонтальное, определяют суммарный вес объекта и координаты точки центра масс в горизонтальной плоскости. На фиг.2 приведен пример силовой характеристики нелинейно-упругой опоры в координатах деформация - сила (d-F). Для определения веса объекта (G) суммируют значения F0 во всех узлах подвески и в домкратах, а координаты точки центра масс в горизонтальной плоскости получают из уравнений механики. При подъеме, реакции в амортизаторах определяют на основании замеров их деформаций по силовым характеристикам (фиг.2), а усилия в домкратах по давлению подаваемой в них жидкости.
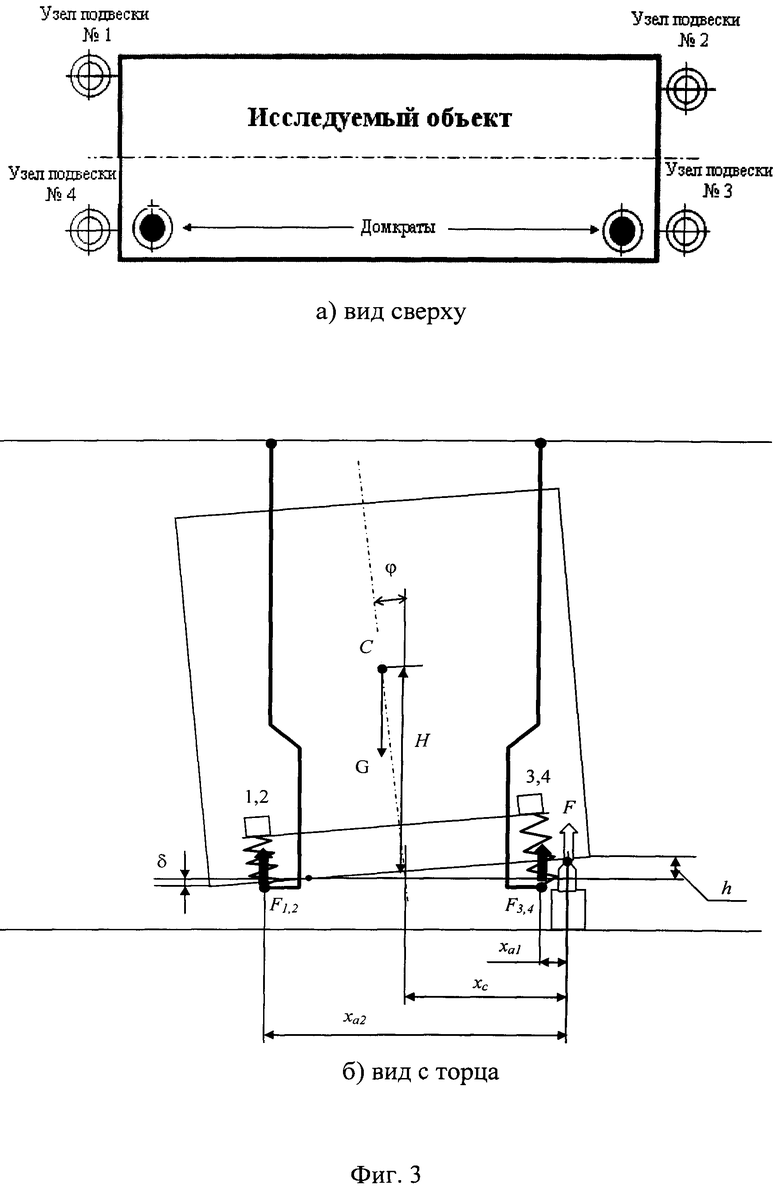
В качестве примера осуществления предлагаемого способа определении центра масс приведен вариант с 4-опорным объектом, с габаритами в несколько метров и весом в несколько сотен тонн. На фиг.3 представлена схема проведения экспериментальных операций способа. Сторону объекта с опорами №3 и №4 выбирают для подъема. Значения высоты подъема стороны (h) задаются произвольно, например: 50, 100, 150, 200 и 250 мм. Величина опускания (δ) противоположной стороны определяется в зависимости от высоты расположения точки (С) центра масс.
Способ определения центра масс состоит из следующих операций:
1. До начала подъема стороны регистрируют начальное пространственное положение объекта относительно ограждающих конструкций, которые неподвижны при подъеме объекта. С поднимаемой стороны расфиксируют штоки амортизаторов.
2. По силовым характеристикам опор определяют величины реакций (F1,2, F3,4), общую весовую нагрузку (G) и расположение точки центра масс (С) в горизонтальной плоскости, а также суммы реакции в опорах №1 и №2 (опускаемая сторона) и в опорах №3 и №4 (поднимаемая сторона).
3. Синхронно поэтапно (в шагом в 50 мм) с помощью гидродомкратов поднимают длинную сторону по опорам №3, №4 объекта на величину h=50÷250 мм.
4. На каждом шаге подъема фиксируют показания давления в гидродомкратах, величины подъема одной стороны (h) и опускания противоположной стороны (δ) и определяют значения параметров, указанные в п.2.
5. По достижении предельного значения подъема, когда сумма подъемных сил (в домкратах), по сравнению с суммой на предыдущем шаге, начнет уменьшаться на величину не менее 5%, определяют усилия, которые на последующих операциях способа используются в расчетах.
6. Выполняют пошаговое опускание объекта.
7. Значение по высоте ЦМ определяют расчетным способом по значениям параметров, полученным в п.5, по уравнению моментов, например, относительно точки приложения подъемной силы гидродомкратов:

где 1, 2, 3, 4 - номера узлов подвески,
xa1, xa2 - координаты положения опор,
H - высота центра масс объекта,
φ - угол поворота объекта по крену,
F1,2, F3,4 - реакции в опорах №1, №2, №3, №4,
G - сила веса объекта,
C - положение центра масс объекта.
Выполнив преобразование относительно Н, получаем аналитическую зависимость следующего вида:

При расчетах используются данные, полученные в максимальной точке подъема стороны с опорам №3 и №4.
В подъеме стороны объекта участвуют как силы, развиваемые гидродомкратами, так и силы, создаваемые амортизаторами - нелинейно-упругими опорами, см. левый участок диаграммы (d-F) на фиг.2. Реакции этих опор замыкаются на потолок сооружения, как показано на фиг.3, таким образом ограничиваются силы, действующие на основание при крене объекта.
Результаты проверки способа выявили возможность получения значений координат точки центра масс исследуемого объекта уже при наклоне его на углы до 3÷5 градусов по крену, что существенно ниже углов необходимого наклона в известных устройствах и способах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС | 2011 |
|
RU2487330C2 |
| Способ измерения вертикальной координаты центра тяжести объекта | 2019 |
|
RU2711210C1 |
| Самоходный буровой станок | 1977 |
|
SU735737A1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ ВИБРОЗАЩИТЫ ОБОРУДОВАНИЯ | 1989 |
|
RU2011173C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ ОБЪЕКТОМ | 2017 |
|
RU2670351C1 |
| Способ управления по крену или тангажу при транспортировке легким и сверхлегким летательным аппаратом расходуемой по весу нагрузки (варианты) и легкий или сверхлегкий летательный аппарат с устройством управления по крену или тангажу при транспортировке расходуемой по весу нагрузки (варианты) | 2022 |
|
RU2796596C1 |
| БОГДАНОВА УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АВТОМОБИЛЯ ИЛИ ДРУГОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2485016C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| Самолет вертикального ультракороткого взлета и посадки | 1990 |
|
SU1816717A1 |
Изобретение относится к области измерений и может быть использовано для определения положения центра масс статически неопределимых многоопорных объектов энерго-, тяжелого и транспортного машиностроения, например крупногабаритных энергоблоков атомных электростанций. Заявленный способ заключается в многократном взвешивании объекта в различных пространственных положениях (в горизонтальном и в наклоненном состояниях). Начальное пространственное положение объекта принимают за горизонтальное, для него определяют суммарный вес объекта и координаты точки центра масс в горизонтальной плоскости. Для определения веса объекта суммируют значения реакций в опорах, определенных по силовым характеристикам, а координаты точки центра масс в горизонтальной плоскости получают из уравнений механики. Для определения высоты положения точки центра масс объект наклоняют только по длинной стороне (по углу крена), пошагово определяя реакции в опорах, а также усилие, развиваемое в устройствах подъема (например, в гидродомкратах). Реакции в опорах определяются на основании замеров их деформаций по силовым характеристикам, а усилия в домкратах - по давлению подаваемой в них жидкости. Подъем выполняется до момента, пока сумма реакций в опорах, расположенных в поднимаемой стороне, и усилия в домкратах не станут уменьшаться в сравнении с предыдущим шагом, а сумма реакций опор по противоположной стороне не начнет, соответственно, стабильно расти. Данным на этом шаге подъема (поворота по крену) используются для расчета по уравнениям моментов высоты положения центра масс объекта. Технический результат заключается в возможности проведения измерений в случаях отсутствия средств прямого взвешивания объектов, в режиме эксплуатации, и условиях ограниченного пространства, с обеспечением точности измерений протяженных объектов переменной жесткости. 3 ил.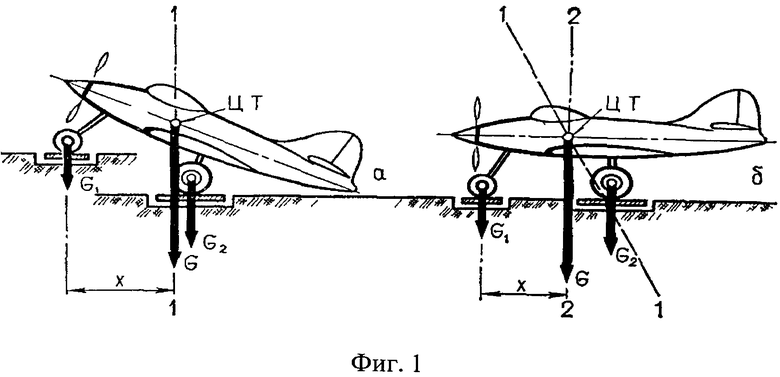
Способ определения положения центра масс, по которому создают отклоняющий момент путем наклона объекта, обеспечивая равновесное состояние объекта, и регистрируют параметры равновесного состояния, по которым находят высоту положения центра масс, отличающийся тем, что объект наклоняют по крену, создавая вдоль одной стороны с помощью гидродомкратов подъемные силы, по меньшей мере в каждом амортизационном узле, подъем производят синхронно, величину подъемной силы наращивают монотонно-ступенчато, в процессе подъема регистрируют величину подъемной силы в каждом гидродомкрате, наращивание подъемных сил ведут до того момента, когда сумма подъемных сил, по сравнению с суммой на предыдущем шаге, начнет уменьшаться на величину не менее 5%, при этом подъем стороны объекта ведут, предварительно расфиксировав следящие штоки амортизаторов на данной стороне объекта.
| Аэродинамика самолета, МГВАК, 2000, с.99, рис.119 | |||
| Пресняков В.А | |||
| Конструкция, расчет и потребительские свойства автомобилей: лабораторный практикум | |||
| - Владивосток: изд-во ВГУЭС, 2003 | |||
| Способ определения положения центра масс объекта | 1990 |
|
SU1795317A1 |

