ел С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координаты центра масс объекта | 1991 |
|
SU1820256A1 |
| Устройство для определения положения центра масс объекта | 1990 |
|
SU1820255A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГИХ СВОЙСТВ КОНСТРУКЦИИ | 1992 |
|
RU2024835C1 |
| Шестикоординатный вибростенд | 1990 |
|
SU1753322A1 |
| Способ определения упруго-диссипативных характеристик древесины | 2019 |
|
RU2715222C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2015 |
|
RU2597280C1 |
| СПОСОБ ПСИХОФИЗИОЛОГИЧЕСКОГО ИССЛЕДОВАНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2126649C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2013 |
|
RU2535522C1 |
| Способ экспериментального определения динамических характеристик гибких протяженных конструкций | 2021 |
|
RU2775360C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ | 2014 |
|
RU2566418C1 |

Использование: в машиностроении для определения положения центра масс неизвестного объекта.. Сущность: объект устанавливают на платформе, подпружиненной к основанию, и закрепляют его, Возбуждают колебания платформы и регистрируют величину виброперемещений в точках, расположенных симметрично точке приложения возбуждающей силы. Определяют направление, в котором разность величин виброперемещений двух точек максимальная, и изменяют положение объекта вдоль этого направления в сторону точки с максимальной величиной вибролеремещений до ликвидации отклонения от параллельности платформы и основания, возникающей при расположении центра масс объекта над точкой приложения возбуждающей силы. 1 ил.
Изобретение относится к машиностроению, в частности к способам для определе- положения центра масс неизвестного объекта, и может быть использовано применительно к области космонавтики, например, на орбите для исследований данного объекта.
Известен способ определения, центра масс объекта, предусматривающий измерение углов наклона изделия и перемещений крайних, относительно точки подвески, точек изделия. Но этим способом нельзя воспользоваться в условиях отсутствия земного тяготения (в условиях микрогравитации).
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ определения координаты центра маг.с обьекта, заключающийся в том. 4f о объект устанавливают на подпружиненную к основанию платформу, регистрируют параметры, характеризующие отклонение от параллельности платформы и основания, и по ним определяют положение центра масс объекта.
Однако известный способ определения положения центра масс объекта, выбранный в качестве прототипа, имеет следующие недостатки. Им нельзя воспользоваться в условиях отсутствия земного тяготения, когда объект (тело) не обладает весом, а так же сложностью осуществления способа в условиях невесомости.
Целью изобретения является повышение точности и расширение эксплуатационных возможностей.
Поставленная цель достигается тем, что в известном способе определения положения центра масс объекта, заключающемся в
VI о ел
Сл5
том, что объект устанавливают на подпружиненную к основанию платформу регистрируют параметры, характеризующие отклонение от параллельности платформы и основания, и по ним определяют положение центра масс объекта, объект закрепляют на платформе, возбуждают колебания платформы, в качестве параметров, характеризующих Отклонение от параллельности регистрируют величину виброперемещений в п точках, расположенных симметрично относительно точки приложения возбуждающей силы, определяют направление, в котором разность величин виброперемещений двух точек максимальная, изменяют положение величиной виброперемещений до ликвидации отклонения от параллельности платформы и основания, возникающий при расположении центра масс объекта над точкой приложения возбуждающей силы,
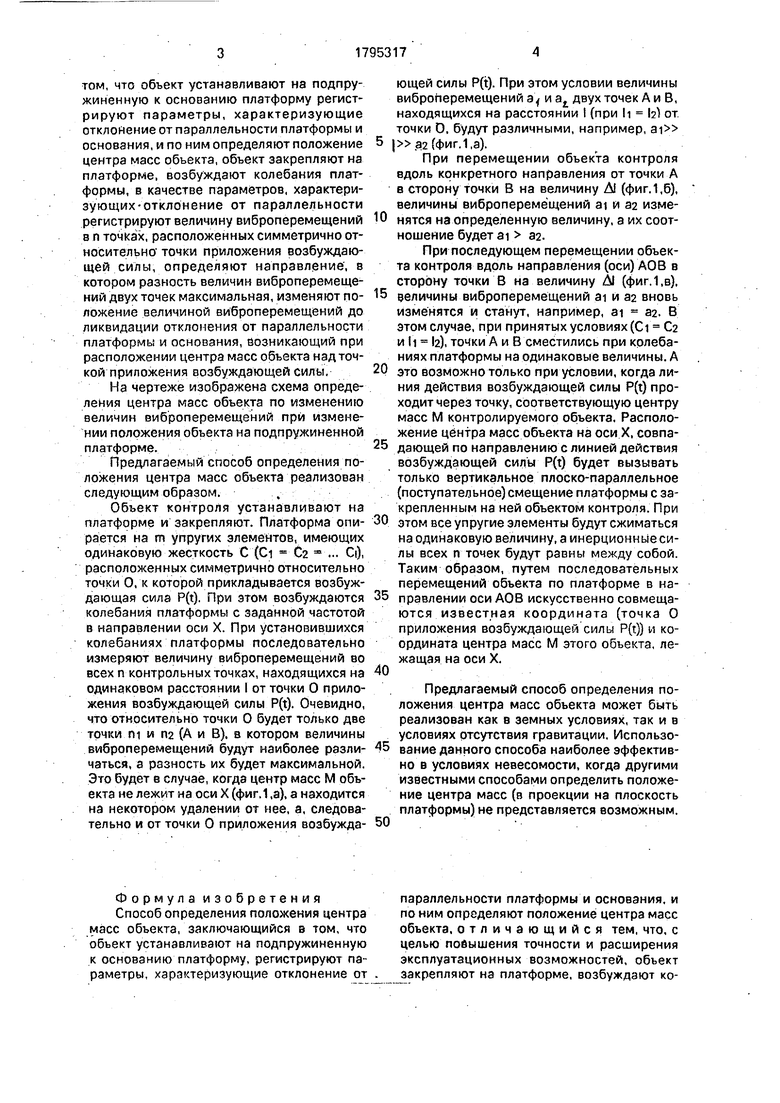
На чертеже изображена схема определения центра масс объекта по изменению величин виброперемещений при изменении положения объекта на подпружиненной платформе.
Предлагаемый способ определения положения центра масс объекта реализован следующим образом.,
Объект контроля устанавливают на платформе и закрепляют. Платформа опирается на m упругих элементов, имеющих одинаковую жесткость С (Ci С2 ш ... Ci), расположенных симметрично относительно точки О, к которой прикладывается возбуждающая сила P(t). При этом возбуждаются колебания платформы с заданной частотой в направлении оси X. При установившихся колебаниях платформы последовательно измеряют величину виброперемещений во всех п контрольных точках, находящихся на одинаковом расстоянии I от точки О приложения возбуждающей силы P(t). Очевидно, что относительно точки О будет только две точки щ и па (А и В), в котором величины виброперемещений будут наиболее различаться, а разность их будет максимальной. Это будет в случае, когда центр масс М объекта не лежит на оси X (фиг.1 ,а), а находится на некотором удалении от нее, а, следовательно и от точки О приложения возбуждаФормула изобретения Способ определения положения центра масс объекта, заключающийся в том, что объект устанавливают на подпружиненную к основанию платформу, регистрируют параметры, характеризующие отклонение от
ющей силы P(t). При этом условии величины виброперемещений а и at двух точек А и В, находящихся на расстоянии I (при li Ы от точки О. будут различными, например, ai
.2(фиг.1,а).
При перемещении объекта контроля вдоль конкретного направления от точки А в сторону точки В на величину А (фиг. 1,6), величины виброперемёщений ai и 32 изменятся на определенную величину, а их соотношение будет ai 32.
При последующем перемещении объекта контроля вдоль направления (оси) АОВ в сторону точки В на величину Д1 (фиг.1,в),
величины виброперемещений ai и 32 вновь изменятся и станут, например, ai 32. В этом случае, при принятых условиях (С 1 С2 и It 12), точки А и В сместились при колебаниях платформы на одинаковые величины. А
это возможно только при условии, когда линия действия возбуждающей силы P(t) проходит через точку, соответствующую центру масс М контролируемого объекта. Расположение центра масс объекта на оси X, совпадающей по направлению с линией действия возбуждающей силы P(t) будет вызывать только вертикальное плоско-параллельное (поступательное) смещение платформы с закрепленным на ней объектом контроля. При
этом все упругие элементы будут сжиматься на одинаковую величину, а инерционныеси- лы всех п точек будут равны между собой. Таким образом, путем последовательных перемещений объекта по платформе в направлении оси АОВ искусственно совмещаются известная координата (точка О приложения возбуждающей силы P(t)) и координата центра масс М этого объекта, лежащая на оси X.
Предлагаемый способ определения положения центра масс объекта может быть реализован как в земных условиях, так и в условиях отсутствия гравитации, Использование данного способа наиболее эффективно в условиях невесомости, когда другими известными способами определить положение центра масс (в проекции на плоскость платформы) не представляется возможным.
параллельности платформы и основания, и по ним определяют положение центра масс объекта, отличающийся тем, что, с целью повышения точности и расширения эксплуатационных возможностей, объект закрепляют на платформе, возбуждают колебания платформы, в качестве параметров, характеризующих отклонение от параллельности, регистрируют величину вибропере- мещений в п точках, расположенных симметрично относительно точки приложения возбуждающей силы, определяют направление, в котором разность величины виброперемещений двух точек максимальна, изменяют положение объекта вдоль этого направления в сторону точки с максимальной величиной виброперемещений до ликвидации отклонения от параллельности платформы и основания, возникающей при расположении центра масс объекта над точкой приложения возбуждающей силы.
| Устройство для определения координат центра масс изделий | 1986 |
|
SU1350511A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Устройство для определения координат центра масс изделия | 1985 |
|
SU1355879A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
