Изобретение относится к области технической механики и может быть использовано для определения координат центра тяжести и веса тел, имеющих продольную ось симметрии, а именно для определения взлетного веса и положения центра тяжести самолета.
Величина взлетной массы и положение центра тяжести самолета являются важнейшими переменными, определяющими как длину разбега и взлетную дистанцию самолета, так и требуемую величину угла установки стабилизатора перед взлетом.
При эксплуатации самолетов нередко случается их загрузка сверх установленных пределов по весу и изменение положения его центра тяжести, следствием чего являются летные происшествия и катастрофы. Поэтому крайне необходим контроль веса и центровки самолета перед взлетом.
Известен способ определения веса и положения центра тяжести самолета на платформенных весах (патент США №49358856, G01M 1/12, кл. 364/567, опубл. 19.06.1990), при котором самолет закатывают каждой его опорой на отдельную динамометрическую платформу. Главным недостатком данного способа является увеличение технологического времени «оборачиваемости» самолета. Каждый аэродром не может быт оснащен большим количеством весов для всех типов самолетов.
Известен способ определения веса и центровки с помощью измерения усилий на элементах шасси тензометрическим методом (патент США №3203234, кл.73/1416, опубл. 31.08.1965), при котором на каждую опору шасси устанавливают тензометрические датчики. Недостатком данного способа является необходимость специального конструирования силовых элементов шасси для размещения тензометрических датчиков.
Известен способ определения массы и координаты центра тяжести неподвижного самолета, в котором весы содержат силоизмерительные датчики, установленные на трех основаниях, и три гидравлических подъемника (патент RU 2265192 C1, G01G 19/07, опубл. 27.11.2005). Недостатком данного метода является необходимость иметь три мощных гидравлических подъемника и весы большой грузоподъемности.
Известен способ определения веса и координаты центра тяжести (патент РФ от 19.09.96 г. на изобретение «Способ определения веса и координат центра тяжести тел», авторы Скрипкин А.А. и др. по заявке RU №92-015411/28/06281 от 30.12.92 г., опубликовано 19.06.95 г., МКИ G01M 1/12), который является наиболее близким заявляемому устройству.
Известный способ состоит в том, что исследуемое тело вдоль его продольной оси устанавливают на две опоры, одна из которых является измерительной, и измеряют давление на измерительную опору. После этого тело как объект измерения перемещают вдоль его продольной оси на некоторое расстояние, снова измеряют давление тела на измерительную опору и, составляя уравнение равновесия тела при известном расстоянии между опорами, вычисляют координату центра тяжести тела и его вес.
Недостатком способа является необходимость устанавливать объект измерения (тело) на опоры и перемещать его. Операции по установке и перемещению объекта измерения являются сложными и трудоемкими, особенно при объекте измерения в виде самолета, при этом требуется дополнительное дорогостоящее оборудование.
Задачей настоящего изобретения является упрощение и удешевление способа, а также повышение точности измерения веса и координат центра тяжести объекта измерений в виде самолета, что повышает безопасность полетов, особенно за счет оперативности определения веса и центровки груженого самолета непосредственно перед его взлетом.
Поставленная техническая задача решается следующим образом. В способе, в котором самолет как объект измерения устанавливают на измерительную и поддерживающую опоры, измеряют давление самолета на измерительную опору, затем изменяют положение по крайней мере одной из опор, сохраняя при этом заданное расстояние между ними, путем перемещения самолета вдоль его продольной оси с последующим измерением давления самолета на измерительную опору, по результатам измерений вычисляют вес и координату центра тяжести самолета, изменение положения опор осуществляют путем перемещения самолета по установленной наклонно к горизонтали поддерживающей платформе и горизонтально установленной измерительной платформе, оснащенной блоком весоизмерительных датчиков, при давлении на которые передним шасси, являющимся при этом измерительной опорой, а задние шасси - поддерживающей опорой, производят замер давления самолета на измерительную опору заданное количество раз, после чего по результатам замеров определяют вес и координату центра тяжести самолета, учитывая при каждом замере угол положения продольной оси самолета относительно горизонтали и расстояние смещения измерительной опоры относительно точки соприкосновения друг с другом платформ горизонтальной измерительной и наклонной поддерживающей.
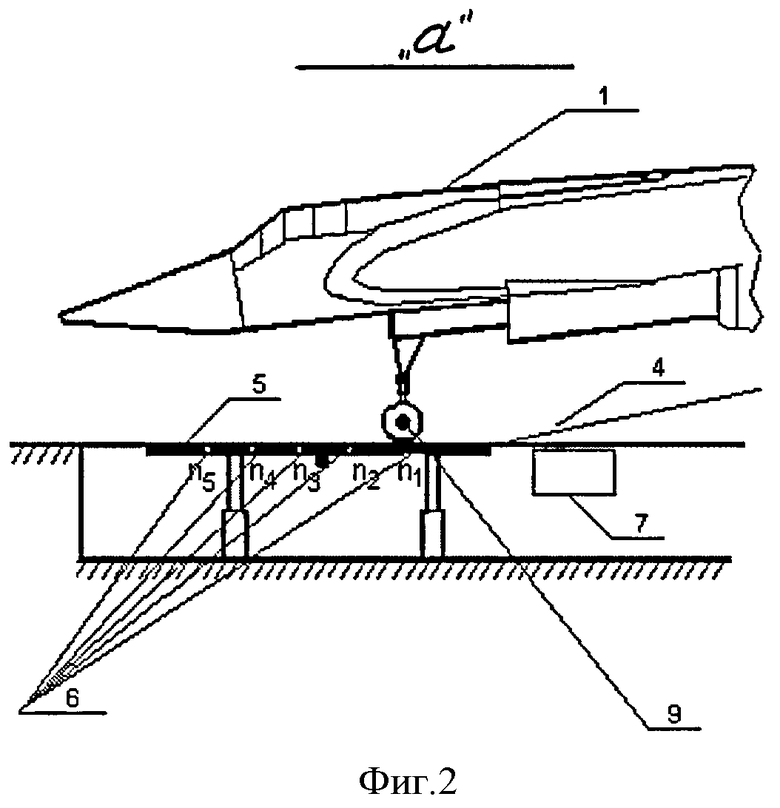
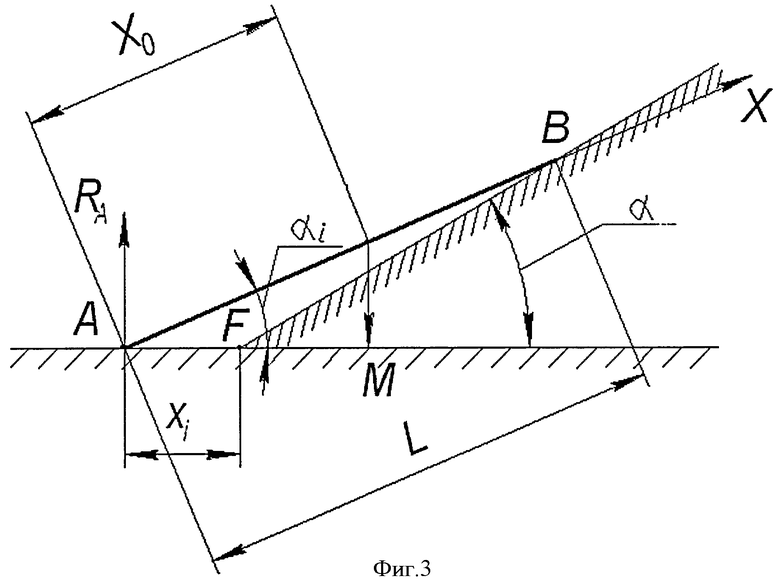
Способ иллюстрирован чертежами, где на фиг.1 - принципиальная схема приспособления для осуществления способа; на фиг.2 изображена весоизмерительная платформа с блоком датчиков узел а на фиг.1; на фиг.3 изображена кинематическая схема, иллюстрирующая способ, где RA - реакция опоры в точке A, xi - смещение самолета относительно точки F соприкосновения наклонной поддерживающей платформы и горизонтальной измерительной платформы, αi - текущий угол наклона продольной оси самолета относительно горизонтали, α - угол наклона поддерживающей платформы относительно горизонтали, X0 - координата центра тяжести самолета, L - расстояние между шасси самолета, M - масса самолета.
Приспособление для осуществления способа определения веса и координат центра тяжести самолета (фиг.1) содержит как продолжение рулежной дорожки участок подъема 2, который в верхней своей части соприкасается с горизонтальной площадкой 3, которая в свою очередь соприкасается поддерживающей платформой 4, установленной под углом α к горизонтали. Измерительная платформа 5 установлена горизонтально и соприкасается с нижним краем поддерживающей платформы 4. Измерительная платформа 5 снабжена блоком весоизмерительных датчиков 6. Кроме этого измерительная платформа снабжена дальномером 7 и микропроцессорным устройством 8. Шасси самолета 1 обозначены: переднее поз.9, заднее поз.10, которые являются измерительной и поддерживающей опорами соответственно. Угол подъема участка 2 и габариты его горизонтальной площадки 3 выбраны из условия доставки и установки самолета 1 на платформы измерительную 5 и поддерживающую 4.
Способ осуществляется следующим образом: самолет 1 как объект измерения перемещают с рулежной дорожки (не показано) по участку подъема 2 на горизонтальную площадку 3, с которой самолет 1 перемещают на поддерживающую платформу 4, наклоненную под углом α к горизонтали, устанавливая, таким образом самолет 1 с расположением его продольной оси 11 под углом α к горизонтали. Затем самолет 1 перемещают вдоль его продольной оси 11 по поддерживающей платформе 4 до установки переднего шасси 9 на измерительной платформе 5 в заданной точке n1 (фиг.2) и производят первый замер давления RA1 самолета 1 на измерительную опору 9 (переднее шасси) и расстояния X1 от точки n1 до точки F на линии соприкосновения платформ друг с другом. Указанное расстояние измеряют дальномером 8. Давление RA измеряют блоком 6 весоизмерительных датчиков. Самолет 1 продолжают перемещать вдоль его продольной оси 11 до установки переднего шасси 9 в следующей точке n2 на измерительной платформе 5, после чего производят замеры давления RA2 и расстояния X2. Указанные замеры производят во всех заданных точках n3, n4, n5.
Расстояние между опорами является постоянной величиной L - это расстояние между шасси (передним и задним), α - угол наклона поддерживающей платформы (известен заранее), αi - текущий угол наклона продольной оси 11 самолета относительно горизонтали, который определяется с помощью тригонометрических функций.
Обработку результатов измерений осуществляют посредством микропроцессорного устройства 8.
Приведем формулы для нахождения массы и координаты центра тяжести самолета (кинематическая схема показана на фиг.2):

где
RA - реакция опоры в точке A,
M - масса самолета,
X0 - координата центра тяжести,
L - расстояние между шасси,
αi - текущий угол наклона самолета.
Неизвестная масса самолета М и координата центра его тяжести X0 находятся из решения данной системы по методу наименьших квадратов.
Преимуществом заявленного способа является то, что измерить массу и координату центра тяжести самолета можно на одних весах малой грузоподъемности. Измерения и их обработка не требуют больших временных затрат и сложных устройств по изменению положения самолета. Определение веса и координат центра тяжести груженого самолета непосредственно перед взлетом способствует повышению безопасности полетов.
Список использованных источников
1. Дарков А.В., Шпиро Г.С. Сопротивление материалов. М.: Высшая школа, 1969. - 734 с.
2. Авторское свидетельство СССР №390396, 1973 г., МКИ G01M 1/12. Способ А.А.Болотникова определения координат центра тяжести тел.
3. Решение о выдаче патента РФ от 19.09.96 г. на изобретение «Способ определения веса и координат центра тяжести тел», авторы Скрипкин А.А. и др. по заявке RU №92-015411/28/06281 от 30.12.92 г., опубликовано 19.06.95 г., МКИ G01M 1/12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА ПЕРЕД ВЗЛЕТОМ | 2011 |
|
RU2463567C1 |
| Весовое устройство для определения взлетной массы и взлетной центровки самолета и способ определения взлетной массы и взлетной центровки самолета (варианты) | 2018 |
|
RU2688575C1 |
| Способ определения веса и координат центра тяжести тел | 2019 |
|
RU2710833C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2006 |
|
RU2319115C1 |
| Способ косвенного измерения вертикальной координаты центра тяжести объекта | 2020 |
|
RU2736325C1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2016 |
|
RU2692948C2 |
| Способ измерения вертикальной координаты центра тяжести объекта | 2019 |
|
RU2711210C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЯ ПОВЕРХНОСТЕЙ ГИБКОЙ УПРУГОЙ ТОНКОСТЕННОЙ ДЕТАЛИ | 1988 |
|
RU2035687C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС | 2011 |
|
RU2495386C2 |
Изобретение относится к весоизмерительной технике и может быть использовано для определения координат центра тяжести и веса тел, имеющих продольную ось симметрии, а именно для определения взлетного веса и положения центра тяжести самолетов. Согласно способу самолет как объект измерения устанавливают на измерительную и поддерживающую опоры, измеряют давление самолета на измерительную опору, затем изменяют положение опор. Изменение положения опор осуществляют путем перемещения самолета по установленной наклонно к горизонтали поддерживающей платформе и горизонтально установленной измерительной платформе, оснащенной блоком весоизмерительных датчиков, при давлении на которые передним шасси, являющимся при этом измерительной опорой, а задние шасси - поддерживающей опорой. Затем производят замер давления самолета на измерительную опору заданное количество раз. После чего, по результатам замеров, определяют вес и координату центра тяжести самолета, учитывая при каждом замере угол положения продольной оси самолета относительно горизонтали и расстояние смещения измерительной опоры относительно точки соприкосновения друг с другом платформ горизонтальной измерительной и наклонной поддерживающей. Технический результат заключается в упрощении и удешевлении способа, а также повышении точности измерений. 3 ил.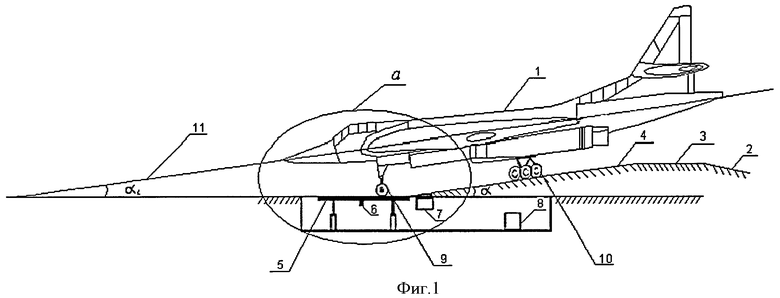
Способ определения веса и координат центра тяжести самолета, в котором самолет устанавливают вдоль его продольной оси на измерительную и поддерживающую опоры, измеряют давление самолета на измерительную опору, затем изменяют положение, по крайней мере, одной из опор путем перемещения самолета вдоль его продольной оси с последующим измерением давления самолета на измерительную опору, сохраняя при этом заданное расстояние между опорами, по результатам измерений вычисляют вес и координату центра тяжести самолета, отличающийся тем, что изменяют положение измерительной и поддерживающей опор путем перемещения самолета по установленной наклонно к горизонтали поддерживающей платформе и горизонтально установленной измерительной платформе, оснащенной блоком весоизмерительных датчиков, при давлении на которые передним шасси, являющимся в данный момент измерительной опорой, а задние шасси - поддерживающей опорой, производят замер давления самолета на измерительную опору заданное количество раз, после чего по результатам замеров определяют вес и координату центра тяжести самолета, учитывая при каждом замере угол положения продольной оси самолета относительно горизонтали и расстояние смещения измерительной опоры относительно точки соприкосновения друг с другом платформ, горизонтальной измерительной и наклонной поддерживающей.
| RU 92015411 А, 19.06.1995 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА САМОЛЕТА | 0 |
|
SU386265A1 |
| RU 94008936 А1, 10.01.1996. | |||

