Изобретение относится к измерительной технике и может быть использовано для измерения координат центра тяжести реальных объектов (например, транспортных средств), которые допускается наклонять на углы от десятых долей до одного радиана.
Известны различные способы нахождения координат центра тяжести, рассматриваемые в учебниках по теоретической механике [1]. К таким способам относят «Симметрию», «Разбиение», «Дополнение», «Интегрирование», которые используются как теоретические способы определения координат центра тяжести. В качестве экспериментальных способов нахождения координат центра тяжести реальных объектов используют способы «Подвешивание», «Взвешивание».
Способ экспериментального взвешивания используется для косвенного измерения (экспериментального нахождения) координат центра тяжести. Суть способа заключается в том, что измеряют вертикальные составляющие реакций опор и расстояния между опорами в горизонтальной плоскости и по этим параметрам по формулам рассчитывают координаты центра тяжести. Недостатком данного способа является невозможность нахождения вертикальной координаты центра тяжести.
Наиболее близким по технической сущности предлагаемому является стандартный (описанный в международных и национальных стандартах РФ) способ измерения вертикальной координаты центра тяжести объекта [2-3]. Данный способ включает измерение опорных реакций объекта, вначале на горизонтально установленной опорной поверхности, а затем при наклоне этой поверхности в продольном направлении. В каждом случае определяют расчетное горизонтальное расстояние от центра тяжести до опор (горизонтальные координаты). Для нахождения вертикальной координаты центра тяжести на объекте закрепляют планшет, на котором через горизонтальные координаты центра тяжести, измеренные для горизонтального и наклонного положения объекта, проводят вертикальные линии.
Координаты центра тяжести при горизонтально установленной опорной поверхности объекта (см. фиг. 1) находят по формуле
 ,
,
где  - расстояние между опорами горизонтально расположенного объекта;
- расстояние между опорами горизонтально расположенного объекта;
Р - сила тяжести объекта;
R1 - реакция опоры А горизонтально расположенного объекта.
Координаты центра тяжести при наклонно установленной опорной поверхности объекта (см. фиг. 2) находят по формуле
где  - расстояние по оси х между опорами наклоненного объекта;
- расстояние по оси х между опорами наклоненного объекта;
R1r - реакция опоры А наклоненного объекта.
Через точки рассчитанных координат проводят вертикальные линии. Пересечение вертикалей указывает на уровень нахождения центра тяжести относительно опорной поверхности.
В общем случае при определении центра тяжести известным способом выполняются следующие действия.
1) Измеряется вес Р объекта.
2) Объект (см. фиг. 1) устанавливается двумя опорами на весы (опоры А), а двумя (либо одной, при трех опорном объекте) опорами вне весов (опоры В) так, чтобы все опоры оказались в горизонтальной плоскости. Измеряется расстояние 1 между опорами, расположенными на весах (опоры А), и расположенными вне весов (опоры В).
3) С помощью весов измеряется реакция R1 опор А.
4) Рассчитывается горизонтальная координата центра тяжести при горизонтальном расположении объекта по формуле 
5) Изготавливается и закрепляется планшет на объекте.
6) Через горизонтальную координату центра тяжести при горизонтальном расположении объекта на планшете проводится вертикальная линия (линия В1).
7) С помощью подъемного механизма с тросом устанавливают объект в наклонное положение (например, поднимая правый край объекта), обеспечивая вертикальность троса и расположение опор А на весах.
8) Измеряют расстояние  (фиг. 2) между линией троса и опорами А, расположенными на весах.
(фиг. 2) между линией троса и опорами А, расположенными на весах.
9) С помощью весов измеряют реакцию R1r опор А.
10) Рассчитывается горизонтальная координата центра тяжести при наклоненном расположении объекта X2r по формуле 
11) Через горизонтальную координату центра тяжести при наклоненном расположении объекта на планшете проводится вертикальная линия (линия В2).
12) С помощью средств измерений линейных размеров измеряется вертикальная координата точки пересечения линий В1 и В2 при горизонтальном расположении объекта (которая равна вертикальной координате центра тяжести объекта).
Недостатком известного способа является его трудоемкость, вызванная: необходимостью изготовления планшета и его закрепления на объекте (действие 5), обеспечения вертикальности троса (действие 7), измерения расстояния между линией троса и опорой (действие 8), расчета горизонтальной координаты центра тяжести при горизонтальном и наклоненном расположении объекта (действия 4 и 10), проведения линий на планшете (действие 6 и 11), измерения координаты точки пересечения линий (действие 12). Кроме этого необходимость изготовления и закрепления планшета увеличивает стоимость измерения вертикальной координаты центра тяжести.
С целью снижения трудоемкости и стоимости измерения вертикальной координаты центра тяжести объекта предлагается после действия 3 в известном способе выполнить следующие действия:
4) установить объект в наклоненное положение (например, поднимая домкратами правый край объекта, и в дальнейшем фиксируя поднятый край от перемещения по вертикали любыми известными способами), обеспечивая расположение двух опор объекта (например, опор А) на весах (действие, аналогичное действию 7 в известном способе);
5) измерить расстояние по вертикали Δh между опорами А, расположенными на весах и опорами В, расположенными вне весов;
6) измерить реакцию R1r опор, расположенных на весах (полный аналог действию 9 в известном способе);
7) рассчитать координату центра тяжести по формуле
В случаях, когда измерить либо установить угол наклона опорной поверхности проще, чем расстояние Δh, предлагается в качестве действия 5 проводить измерение угла наклона опорной поверхности α, а координаты центра тяжести рассчитывают по формуле

Таким образом, вместо двенадцати действий в известном способе нужно выполнить семь действий в предлагаемом способе, что существенно снижает трудоемкость измерения вертикальной координаты центра тяжести. Отсутствие необходимости изготовления и закрепления планшета снижает также финансовые затраты на процесс измерения вертикальной координаты центра тяжести.
При измерении вертикальной координаты центра тяжести объекта с большим числом опор, например, шестиколесного автомобиля или гусеничного транспортного средства возникают сложности в установке всех опор в единой плоскости. В этом случае предлагается ввести дополнительную оснастку - платформу с плоской верхней поверхностью (установочной плоскостью), на которой закрепляется объект. У платформы при ее изготовлении измеряется сила тяжести и координаты центра тяжести, которые приводятся в паспорте на платформу. Для платформы с закрепленным на ней объектом измеряют реакции опор в горизонтальном и наклоненном положении объекта и угол наклона либо разность уровней опор, а вертикальную координату центра тяжести объекта рассчитывают по формуле

либо

где:
R1r∑ - реакция опоры платформы с установленным на ней объектом в наклоненном на угол α положении;
R1∑ - реакция опоры платформы с установленным на ней объектом в горизонтальном положении;
 - расстояние между опорами платформы;
- расстояние между опорами платформы;
α - угол наклона платформы в продольном направлении;
ZП - вертикальная координата центра тяжести платформы;
Pn - вес платформы;
Р - вес объекта;
hП - расстояние от нижней точки опоры платформы до установочной плоскости (высота платформы);
Δh - разность уровней опор платформы в наклоненном положении.
Стоит учесть, что при использовании весов, показывающих массу, в формулах расчета координат центра тяжести вместо сил можно использовать соответствующие этим силам массы.
Для упрощения установки платформы в горизонтальное и наклоненное положения предлагается на самой платформе сформировать три опоры, двумя из которых платформу устанавливают на весы, а одной - вне весов.
Для пояснения сущности изобретения приведен графический материал (см. лист 7), включающий два рисунка, и дан вывод формул (см. лист 8-10) для расчета вертикальной координаты центра тяжести.
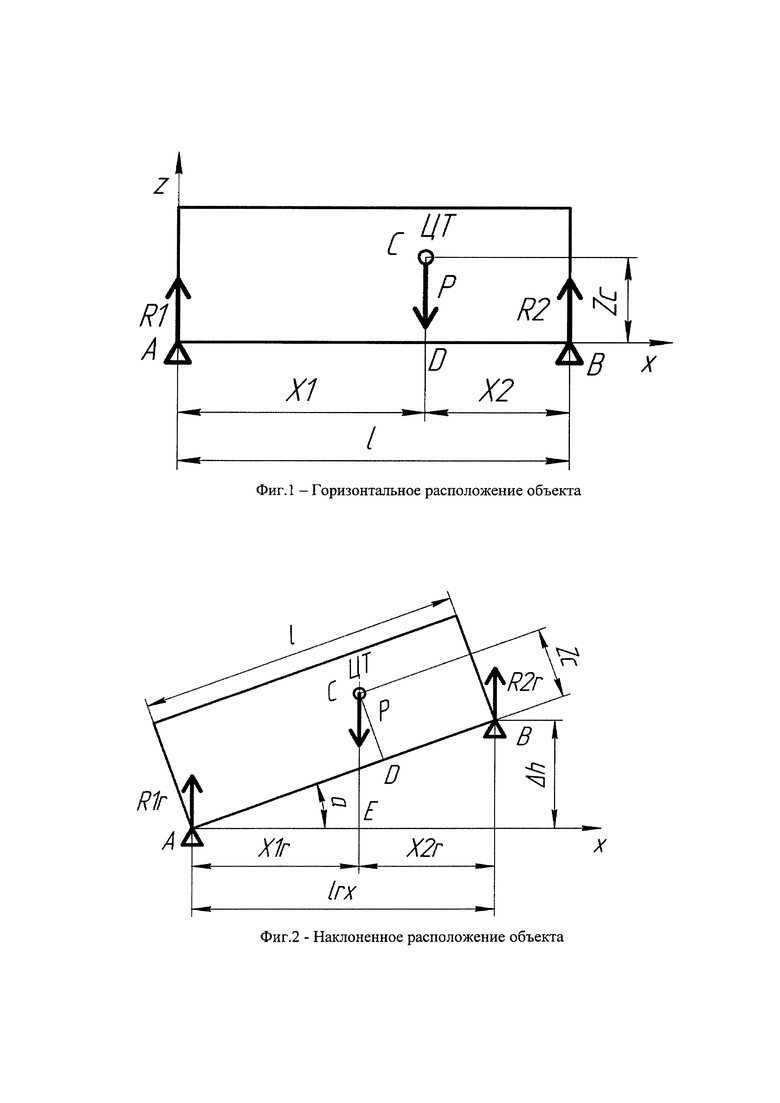
На фиг. 1 показан объект в горизонтальном положении (когда линия АВ, принадлежащая опорной плоскости, горизонтальна). Из центра тяжести, расположенного в точке С, вниз направлена сила тяжести Р объекта. В опорах A и В возникают реакции R1 и R2, соответственно, направленные вверх. Расстояние между опорами А и В по горизонтали -. Координата центра тяжести по вертикали (расстояние от опорной поверхности до центра тяжести) - ZC. Расстояние от опор А до центра тяжести объекта по оси х - X1, а расстояние от опор В до центра тяжести объекта по оси х-Х2.
На фиг. 2 показан объект в наклоненном положении на угол α. При этом опоры В располагаются выше опор А на величину Δh. Расстояние между опорами А и В по горизонтали -  равно проекции на горизонтальную плоскость. Расстояние от опор А до центра тяжести наклоненного объекта по оси х - X1 r и расстояние от опор В до центра тяжести наклоненного объекта по оси х-X2r.
равно проекции на горизонтальную плоскость. Расстояние от опор А до центра тяжести наклоненного объекта по оси х - X1 r и расстояние от опор В до центра тяжести наклоненного объекта по оси х-X2r.
Вывод формул для расчета координат центра тяжести осуществлен на основе знаний теоретической механики и аналитической геометрии.
Измерение вертикальной координаты цента тяжести объекта начинается с его взвешивания, при котором измеряется сила тяжести Р (либо масса) объекта на весах, которые могут быть проградуированы в ньютонах либо килограммах.
Для объектов, при установке которых получается две группы опор с одинаковыми координатами по оси x в каждой группе, измерения координат центра тяжести объекта целесообразно осуществлять по п. 1 и п. 2 формулы изобретения. У таких объектов опоры делятся на передние (с большей координатой X) и задние. Задними опорами объект ставится на чашку весов, а передними - на горизонтальную площадку, высота которой может регулироваться, например, с помощью домкратов. Вначале площадка устанавливается на уровне чашки весов. Измеряется расстояние между передними и задними опорами  . Регистрируются показания весов R1 в горизонтальном положении объекта. Затем площадка поднимается, устанавливая объект в наклоненное положение, измеряется разность между горизонтальными уровнями чашки весов и площадки Δh. Регистрируются показания весов R1r в наклоненном положении объекта. По формуле (11) находится вертикальная координата центра тяжести.
. Регистрируются показания весов R1 в горизонтальном положении объекта. Затем площадка поднимается, устанавливая объект в наклоненное положение, измеряется разность между горизонтальными уровнями чашки весов и площадки Δh. Регистрируются показания весов R1r в наклоненном положении объекта. По формуле (11) находится вертикальная координата центра тяжести.
Если известен рекомендуемый угол наклона объекта при измерении центра тяжести, то после измерения  и R1 в горизонтальном положении объекта площадка наклоняется в продольном положении пока угол α не достигнет рекомендуемого значения. Равенство угла наклона рекомендуемому значению можно контролировать угловыми мерами, совмещенными с уровнем либо другими средствами измерений. После этого регистрируются показания весов R1r и по формуле (10) находится вертикальная координата центра тяжести.
и R1 в горизонтальном положении объекта площадка наклоняется в продольном положении пока угол α не достигнет рекомендуемого значения. Равенство угла наклона рекомендуемому значению можно контролировать угловыми мерами, совмещенными с уровнем либо другими средствами измерений. После этого регистрируются показания весов R1r и по формуле (10) находится вертикальная координата центра тяжести.
В случае, когда координаты опор по продольной оси нельзя объединить в две группы по равенству координат, то для измерения координат центра тяжести объекта рекомендуется использовать дополнительную платформу, которая имеет три опоры. Верхняя поверхность платформы плоская и на ней предусмотрена возможность фиксации объекта от перемещения относительно платформы, например зажимами. У платформы известно: расстояние между опорами в продольном направлении  ; сила тяжести Pn; вертикальная координата центра тяжести платформы Zn,. После измерения веса объекта Р он устанавливается на платформу. Платформа двумя опорами ставится на чашку весов, а одной опорой - на горизонтальную площадку. С помощью подъемных средств площадка выравнивается с чашкой весов, регистрируются показания весов R1∑ при горизонтальном положении объекта. С помощью подъемных средств площадка поднимается и контролируется угол α наклона платформы. При достижении нужного угла наклона платформы подъем площадки прекращается. Регистрируются показания весов R1r∑ в наклоненном положении объекта. По формуле (16) рассчитывается вертикальная координата центра тяжести.
; сила тяжести Pn; вертикальная координата центра тяжести платформы Zn,. После измерения веса объекта Р он устанавливается на платформу. Платформа двумя опорами ставится на чашку весов, а одной опорой - на горизонтальную площадку. С помощью подъемных средств площадка выравнивается с чашкой весов, регистрируются показания весов R1∑ при горизонтальном положении объекта. С помощью подъемных средств площадка поднимается и контролируется угол α наклона платформы. При достижении нужного угла наклона платформы подъем площадки прекращается. Регистрируются показания весов R1r∑ в наклоненном положении объекта. По формуле (16) рассчитывается вертикальная координата центра тяжести.
Вывод математического выражения для расчета вертикальной координаты центра тяжести
С целью определения вертикальной координаты цента тяжести рассмотрим реакции опор при горизонтальном (фиг. 1) и наклоненном (фиг. 2) положении объекта.
Известно [1] что


где: Р - сила тяжести объекта;
R1, R2 - реакции опоры А и В при горизонтальном объекте;
R1r, R2r - реакции опоры А и В при наклоненном объекте.
Величины AD и АЕ находятся через реакции опор по формулам


где: X1 - координата центра тяжести по оси х относительно опоры А при горизонтальном объекте;
X1r - координата центра тяжести по оси х относительно опоры А при наклоненном объекте;
 - расстояние между опорами А и В по оси х при горизонтальном объекте;
- расстояние между опорами А и В по оси х при горизонтальном объекте;
α - угол наклона объекта.
Объект, показанный на фиг. 2, повернут относительно объекта, показанного на фиг. 1, на угол α. В аналитической геометрии [4] известно выражение для преобразования координат при повороте координатной системы на угол α

из которого получается

Подставив (3) и (4) в (6) получим

При этом котангенс угла поворота осей вычисляется по формуле

Учитывая (1) и (2) справедливо записать, что

Подставив (9) в (7) получим

С учетом (8) получается, что вертикальная координата центра тяжести, выраженная через реакции опоры А (опора №1), находится по формуле

Если при измерении координат центра тяжести объекта использовать дополнительную оснастку (например, платформу с плоской поверхностью для установки объектов) то справедливо выражение [1]

где Z∑ - общая координата центра тяжести объекта с платформой по вертикали;
P∑ - общая сила тяжести объекта с платформой;
ZП - вертикальная координата центра тяжести платформы;
hП - расстояние от нижней точки опоры платформы до ее установочной плоскости (высота платформы);
РП - сила тяжести платформы.
Из выражения (12) получается

Общая координата центра тяжести платформы с объектом Z∑ косвенно измеряется с использованием выражения, аналогичного (9) или (10).

где R1∑ и R1r∑ - реакция опоры платформы с установленным на ней объектом в горизонтальном и наклоненном положениях;
 - расстояние между опорами платформы по оси х;
- расстояние между опорами платформы по оси х;
P∑ - сила тяжести платформы с установленным на нее объектом, которую можно найти по формуле

Подставив (14) в (13) с учетом (15) получается

Учитывая, что сила тяжести находится умножением массы тела на ускорение свободного падения (P=mg), то после подстановки этой зависимости в (13) и сокращения на ускорение свободного падения получается

где m и mп - массы объекта и платформы, соответственно.
Также не сложно показать, что во всех выражениях, где есть силы, вместо сил, можно подставлять массы, соответствующие этим силам.
Таким образом, вертикальную координату центра тяжести объекта, устанавливаемого на весы без платформы, целесообразно рассчитывать по выражениям (10) или (11), а объекта, устанавливаемого на платформу, - по выражению (16).
Список использованных источников
1. Тарг С.М. Краткий курс теоретической механики: Учеб. для втузов. - 10-е изд., перераб. и доп. - М: Высш. шк., 1986. - 416 с.
2. ГОСТ 30750-2001 (ИСО 789-6-82) ТРАКТОРЫ СЕЛЬСКОХОЗЯЙСТВЕННЫЕ Определение положения центра тяжести
3. ГОСТ 27248-87 (ИСО 5005-77) МАШИНЫ ЗЕМЛЕРОЙНЫЕ Метод определения положения центра тяжести.
4. Гуревич В.Б., Минорский В.П. Учебник аналитической геометрии для втузов. - М.: Гос. издательство физико-математической литературы, 1958. - 164 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ косвенного измерения вертикальной координаты центра тяжести объекта | 2020 |
|
RU2736325C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЯ ПОВЕРХНОСТЕЙ ГИБКОЙ УПРУГОЙ ТОНКОСТЕННОЙ ДЕТАЛИ | 1988 |
|
RU2035687C1 |
| Устройство для определенияКООРдиНАТ цЕНТРА ТяжЕСТи издЕлий | 1977 |
|
SU813150A1 |
| Способ определения положения центра тяжести массивных и крупногабаритных объектов сложной формы | 2022 |
|
RU2809111C1 |
| Весовое устройство для определения взлетной массы и взлетной центровки самолета и способ определения взлетной массы и взлетной центровки самолета (варианты) | 2018 |
|
RU2688575C1 |
| Способ определения статической устройчивости транспортных средств | 2022 |
|
RU2788539C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАССЫ ОБЪЕКТА | 1990 |
|
RU2100783C1 |
| Стенд для определения координат центра тяжести тела | 1989 |
|
SU1728689A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения координат центра тяжести реальных объектов (например, транспортных средств), которые допускается наклонять на углы величиной от десятых долей до одного радиана. Техническим результатом является снижение трудоемкости и стоимости измерения вертикальной координаты центра тяжести объекта. Способ включает в себя измерение веса объекта Р, установку объекта двумя опорами на весы, а двумя либо одной оставшимися опорами на горизонтальную площадку, которая может перемещаться по вертикали, выравнивание уровней чашки весов и площадки, измерение расстояния  между опорами, расположенными на весах и на площадке, и регистрацию показаний весов R в этом положении; дальнейшую установку объекта в наклоненное положение, изменяя высоту площадки относительно чашки весов, и регистрацию показаний весов в наклоненном положении Rr. При этом дополнительно измеряют различие уровней площадки и чашки весов Δh в наклоненном положении объекта и рассчитывают вертикальную координату центра тяжести объекта по соответствующей формуле. Кроме того, дополнительно измеряют угол наклона объекта α и рассчитывают вертикальную координату центра тяжести объекта по соответствующей формуле. 1 з.п. ф-лы, 2 ил.
между опорами, расположенными на весах и на площадке, и регистрацию показаний весов R в этом положении; дальнейшую установку объекта в наклоненное положение, изменяя высоту площадки относительно чашки весов, и регистрацию показаний весов в наклоненном положении Rr. При этом дополнительно измеряют различие уровней площадки и чашки весов Δh в наклоненном положении объекта и рассчитывают вертикальную координату центра тяжести объекта по соответствующей формуле. Кроме того, дополнительно измеряют угол наклона объекта α и рассчитывают вертикальную координату центра тяжести объекта по соответствующей формуле. 1 з.п. ф-лы, 2 ил.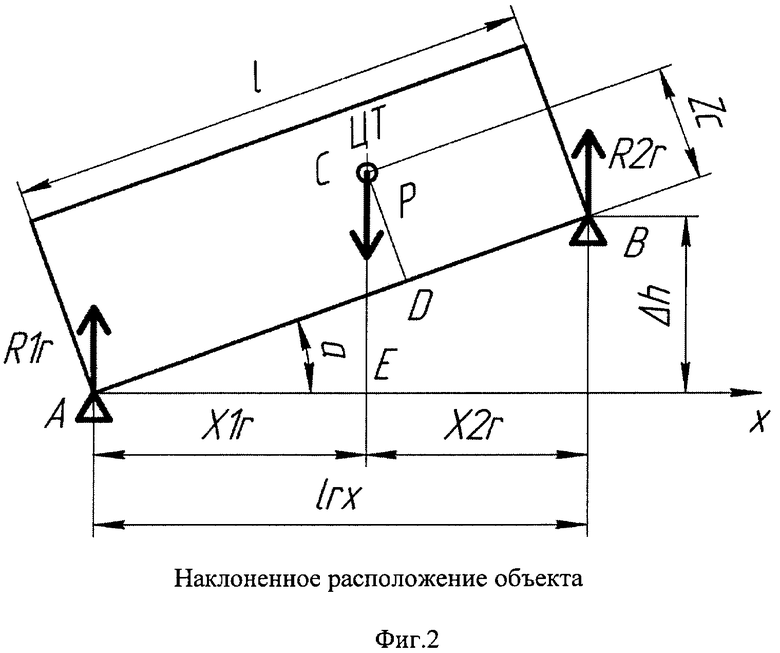
1. Способ измерения вертикальной координаты центра тяжести объекта, включающий измерение веса объекта Р; установку объекта двумя опорами на весы, а двумя либо одной оставшимися опорами на горизонтальную площадку, которая может перемещаться по вертикали, выравнивание уровней чашки весов и площадки, измерение расстояния  между опорами, расположенными на весах и на площадке, и регистрацию показаний весов R в этом положении; дальнейшую установку объекта в наклоненное положение, изменяя высоту площадки относительно чашки весов и регистрацию показаний весов, в наклоненном положении Rr; отличающийся тем, что дополнительно измеряют различие уровней площадки и чашки весов Δh в наклоненном положении объекта и рассчитывают вертикальную координату центра тяжести объекта по формуле
между опорами, расположенными на весах и на площадке, и регистрацию показаний весов R в этом положении; дальнейшую установку объекта в наклоненное положение, изменяя высоту площадки относительно чашки весов и регистрацию показаний весов, в наклоненном положении Rr; отличающийся тем, что дополнительно измеряют различие уровней площадки и чашки весов Δh в наклоненном положении объекта и рассчитывают вертикальную координату центра тяжести объекта по формуле
2. Способ по п. 1, отличающийся тем, что измеряют угол наклона объекта α и рассчитывают вертикальную координату центра тяжести объекта по формуле
| Способ определения вертикальной координаты центра масс транспортного средства относительно опорной горизонтальной поверхности | 1990 |
|
SU1721461A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| Стенд для определения устойчивости мобильных машин | 1972 |
|
SU515958A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| CN 109459121 A, 12.03.2019. | |||

